Изобретение относится к области машиностроения, в частности к дистанционным системам управления давлением в тормозах колес транспортного средства, и предназначено для использования преимущественно в объектах авиационной техники.
Известен способ управления давлением в тормозах колес транспортного средства, заключающийся в понижении тормозного давления при возникновении избыточного скольжения колеса (возникновении "юзовой" ситуации), выдерживании давления на скорректированном уровне и дальнейшем повышении давления с заданным темпом до первоначального уровня (авторское свидетельство СССР N 823195, кл. B 60 T 8/32).
При использовании известного способа управления давлением в процессе торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием происходит большое количество последовательных циклов сбросов и нарастаний тормозного давления, что снижает средний реализуемый тормозной момент, следовательно, увеличивает дистанцию торможения транспортного средства, что в конечном итоге снижает его эксплуатационную надежность.
Положительный результат, который может быть достигнут при использовании предлагаемого технического решения, выражается в уменьшении дистанции торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием за счет увеличения среднего реализуемого тормозного момента, что повышает эксплуатационную надежность транспортного средства.
Указанный результат достигается тем, что при увеличении оператором заданного уровня тормозного давления или при росте давления после выдержки его на скорректированном уровне (для защиты колес от "юза") повышение тормозного давления останавливают на уровне, при котором достигается относительное проскальзывание (S) колес, равное 0,8 - 0,9 от величины относительного проскальзывания (S0), соответствующего максимальному значению коэффициента сцепления колес с дорожным покрытием для текущей скорости транспортного средства.
При этом S = (W0 - Wт)/W0, (1)
где
Wт - угловая скорость тормозящегося колеса;
W0 - угловая скорость колеса, соответствующая скорости транспортного средства:
So = Svo - V • (Svo - Svmax)/Vmax, (2)
где
Svo - относительное проскальзывание колеса, соответствующее максимальному значению коэффициента сцепления колес с дорожным покрытием при остановке транспортного средства;
Svmax - относительное проскальзывание колеса, соответствующее максимальному значению коэффициента сцепления колес с дорожным покрытием при максимальной скорости торможения транспортного средства;
Vmax - максимальная скорость торможения транспортного средства;
V - текущая скорость транспортного средства.
Благодаря изменению тормозного давления указанным образом значительно уменьшается количество сбросов тормозного давления в процессе торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием, в результате чего повышается эффективность торможения и эксплуатационная надежность транспортного средства.
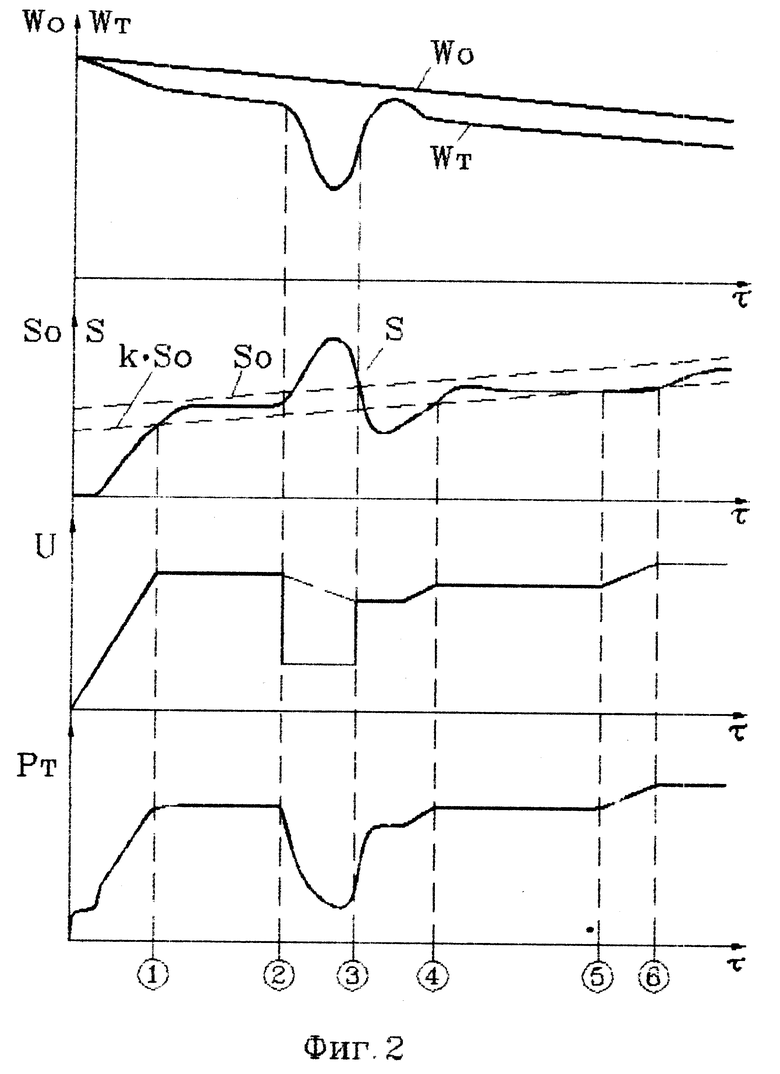
На фиг. 1 показана качественная зависимость коэффициента сцепления колеса с дорожным покрытием μ от величины относительного проскальзывания S при различных скоростях транспортного средства;
на фиг. 2 представлены графики изменения угловой скорости колеса Wт, сигнала управления U, тормозного давления Pт и других величин, иллюстрирующие предлагаемый способ управления давлением.
При обжатии оператором тормозной педали происходит нарастание сигнала управления U пропорционально ходу педали, в результате чего увеличивается давление Pт и происходит уменьшение угловой скорости тормозящегося колеса Wт по сравнению с величиной Wо, соответствующей угловой скорости нетормозящегося колеса. При этом в каждый момент времени оценивается соотношение между величинами S и Sо, определяемыми по формулам (1) и (2). При достижении проскальзыванием (S) значения (k•Sо) нарастание сигнала (U) останавливается (точка 1 на фиг. 2), и дальнейшее торможение происходит с постоянным уровнем давления (Pт), обеспечивая реализацию коэффициента сцепления μ колеса с дорожным покрытием на уровне, близком к максимальному значению для текущей скорости транспортного средства.
Коэффициент запаса k выбирается в пределах 0,8 - 0,9 в зависимости от обеспечиваемого быстродействия в гидравлическом тракте тормозной системы транспортного средства, исходя из величины временного запаздывания остановки нарастания давления Pт относительно момента остановки нарастания сигнала управления U.
В случае резкого ухудшения условий сцепления в процессе торможения (возникновении избыточного скольжения колеса) происходит снижение давления (точка 2 на фиг. 2) с последующим его нарастанием до скорректированного уровня (точка 3 на фиг. 2) при раскрутке колеса. Снижение давления производят при превышении допустимого значения относительного проскальзывания или углового замедления колеса. На скорректированном уровне давление выдерживают в течение заданного времени, после чего происходит дальнейшее нарастание сигнала U, следовательно, и давления до момента выполнения условия S = k•Sо (точка 4 на фиг. 2).
По мере уменьшения скорости транспортного средства величина проскальзывания Sо увеличивается (см. фиг. 1). При выполнении условия k•Sо > S (точка 5 на фиг. 2) происходит дальнейшее повышение давления Pт до момента S = k•Sо(точка 6 на фиг.2).
Таким образом, при использовании предлагаемого способа в условиях пониженного сцепления колес с дорожным покрытием осуществляется автоматическое поддержание давления на уровне, близком к оптимальному значению, обеспечивая соответствие тормозного момента располагаемому моменту сцепления колеса с дорожным покрытием, что повышает эффективность торможения.
Предлагаемый способ управления давлением может быть реализован, например, с использованием вычислителя на базе микропроцессора типа МК51 (см. Справочник "Однокристальные микроЭВМ", Москва: Бином, 1994, стр. 107) или аналоговой техники, формирующего сигнал управления гидроусилителем типа сопло - заслонка по сигналам от датчиков хода тормозной педали, давления в тормозе и угловой скорости колес транспортного средства.
Изобретение позволяет уменьшить дистанцию торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием за счет увеличения среднего реализуемого тормозного момента и тем самым повысить его эксплуатационную надежность. Для этого в условиях пониженного сцепления для защиты колес от "юза" резко уменьшают тормозное давление, затем восстанавливают его до скорректированного уровня и выдерживают на этом уровне заданное время, после чего давление повышают с заданным темпом до тех пор, пока относительное проскальзывание колес не достигнет величины, равной 0,8 - 0,9 от значения относительного проскальзывания соответствующего максимальному значению коэффициента сцепления колес с дорожным покрытием. 2 ил.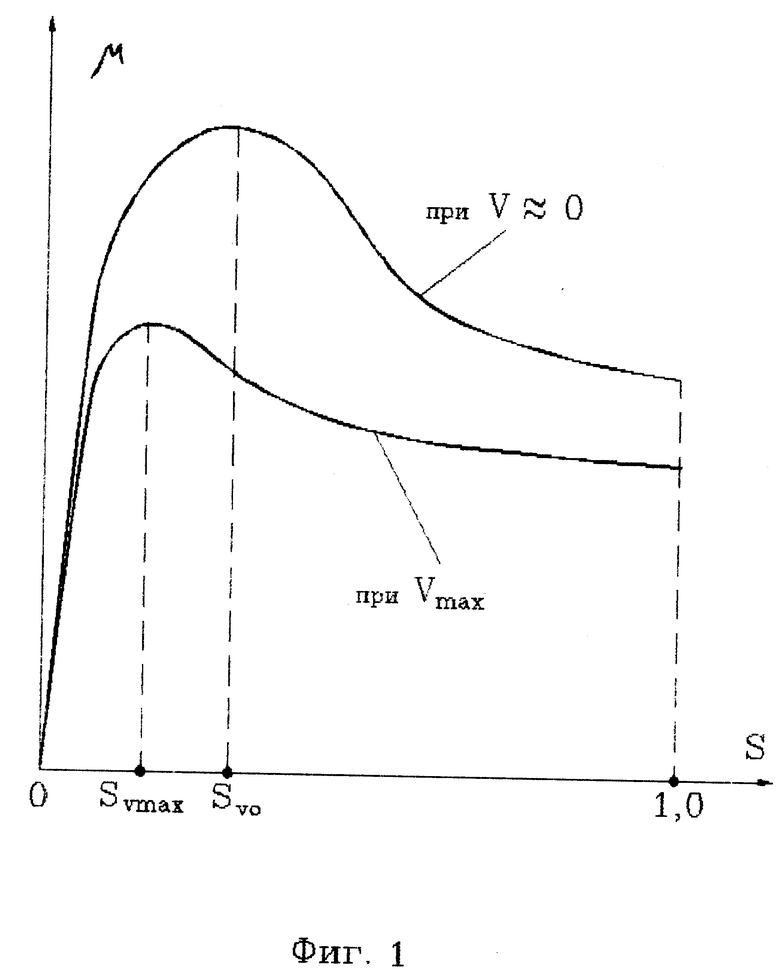
Способ управления торможением колес транспортного средства, заключающийся в уменьшении тормозного давления при возникновении избыточного скольжения колеса, выдерживании на скорректированном уровне и дальнейшем повышении давления с заданным темпом, отличающийся тем, что повышение тормозного давления останавливают по достижении относительным проскальзыванием колес величины, равной 0,8 - 0,9 от значения относительного проскальзывания, соответствующего максимальному значению коэффициента сцепления колес с дорожным покрытием для текущей скорости транспортного средства.
| Способ автоматического управленияКОлЕСНыМи ТОРМОзАМи пРи НАЕздЕ НАучАСТОК C пОНижЕННыМ СцЕплЕНиЕМ | 1975 |
|
SU823195A1 |
| Способ регулирования давления в антиблокировочной тормозной системе транспортного средства при торможении | 1990 |
|
SU1831454A3 |
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |

