Изобретение относится к области машиностроения, в частности к дистанционным системам управления давлением в тормозах колес транспортного средства, и предназначено для использования преимущественно в объектах авиационной техники.
Известен способ автоматического управления колесными тормозами, заключающийся в том, что системой противоблокировочной защиты колес транспортного средства осуществляют понижение давления в тормозном цилиндре при возникновении избыточного скольжения колеса (возникновении "юзовой" ситуации), а затем понижение давления прекращают и удерживают давление на достигнутом уровне, а при прекращении скольжения осуществляют повышение давления до первоначального уровня (смотри, например, авт. св. СССР 823195, кл. В 60 Т 8/02).
При использовании известного способа управления колесными тормозами в процессе торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием происходит большое количество последовательных циклов сбросов и нарастаний тормозного давления, что снижает средний реализуемый тормозной момент, следовательно, увеличивает дистанцию торможения транспортного средства, что в конечном итоге снижает его эксплуатационную надежность.
Положительный результат, который может быть достигнут от использования предлагаемого технического решения, заключается в повышении эксплуатационной надежности транспортного средства за счет повышения эффективности (уменьшения дистанции) торможения в условиях пониженного сцепления колес с дорожным покрытием путем увеличения среднего реализуемого тормозного момента.
Указанный результат достигается тем, что при росте давления после выдержки его на скорректированном уровне (для защиты колес от "юза") повышение тормозного давления останавливают при достижении замедлением колеса заданной величины, превышающей в 1,5-2,5 раза максимально необходимую величину замедления транспортного средства.
Благодаря изменению тормозного давления указанным образом значительно уменьшается количество сбросов тормозного давления в процессе торможения транспортного средства в условиях пониженного сцепления колес с дорожным покрытием, в результате чего повышается эффективность торможения транспортного средства и тем самым его эксплуатационная надежность.
На чертеже представлены графики изменения угловой скорости колеса W, текущего замедления Ет колеса, сигнала управления U и тормозного давления Рт.
При обжатии оператором тормозной педали пропорционально ее ходу формируется сигнал управления U, в соответствии с которым в тормозе колеса устанавливается заданный оператором уровень тормозного давления Рт. В процессе торможения транспортного средства контур противоблокировочной защиты постоянно оценивает величину текущего замедления Ет и угловой скорости W колеса, корректируя при необходимости величину сигнала управления U, пропорционально которому изменяется тормозное давление Рт.
При торможении транспортного средства в условиях пониженного сцепления колес с дорожным покрытием при возникновении "юзовых" ситуаций (при недопустимых значениях углового замедления или проскальзывания колеса) сигнал управления U уменьшается, в результате чего понижается тормозное давление (точка 1 на чертеже), обеспечивая раскрутку колеса, после чего давление выдерживается некоторое время на скорректированном уровне, а затем начинает повышаться. В случаях достижения замедлением Ет колеса заданной величины Еo нарастание сигнала U останавливается (точки 2, 4) и торможение происходит с постоянным уровнем давления Рт, пока выполняется условие (Ет>Ео). При уменьшении замедления Ет колеса давление вновь начинает увеличиваться (точки 3, 5) и при достаточном сцеплении колес с дорожным покрытием достигает уровня, заданного оператором.
Заданная величина Еo замедления колеса, при достижении которого происходит остановка нарастания тормозного давления, выбирается в 1,5-2,5 раза больше (по абсолютной величине) максимально необходимой величины замедления транспортного средства - величины замедления при хороших условиях сцепления колес с дорожным покрытием и максимальном обжатии тормозной педали. Выбор величины Ео менее указанной может приводить к "ложным" остановкам нарастания давления, а выбор Ео в большую сторону значительно снижает эффективность использования предлагаемого технического решения.
Конкретное значение Ео выбирается в зависимости от обеспечиваемого быстродействия в гидравлическом тракте тормозной системы транспортного средства, а также с учетом величины тангенциальной упругости пневматика тормозного колеса.
Таким образом, при использовании предлагаемого способа в условиях пониженного сцепления колес с дорожным покрытием осуществляется автоматическое поддержание давления на уровне, близком к оптимальному значению, обеспечивая реализацию тормозного момента на уровне, близком по значению к моменту сцепления колеса с дорожным покрытием, что повышает эффективность торможения транспортного средства и тем самым его эксплуатационную надежность.
Предлагаемый способ автоматического управления торможением колес может быть реализован, например, с использованием вычислителя на базе микропроцессора типа МК51 (см. Справочник "Однокристальные микроЭВМ". - М.: Бином, 1994, с. 107) или с использованием электронного устройства на базе аналоговой техники, формирующего сигнал управления гидроусилителем типа "сопло-заслонка" по сигналам от датчиков хода тормозной педали, давления в тормозе и угловой скорости колес транспортного средства.
Изобретение относится к области машиностроения и предназначено для использования преимущественно в тормозных системах объектов авиационной техники. При возникновении "юзовой" ситуации колеса повышение тормозного давления останавливают при достижении замедлением колеса заданной величины, превышающей в 1,5-2,5 раза максимально необходимую величину замедления транспортного средства. Техническим результатом является повышение эксплутационной надежности транспортного средства за счет повышения эффективности торможения в условиях пониженного сцепления колес с дорожным покрытием путем автоматического поддержания тормозного давления на уровне, близком к оптимальному значению, обеспечивая реализацию тормозного момента на уровне, близком по значению к моменту сцепления колеса с дорожным покрытием. 1 ил.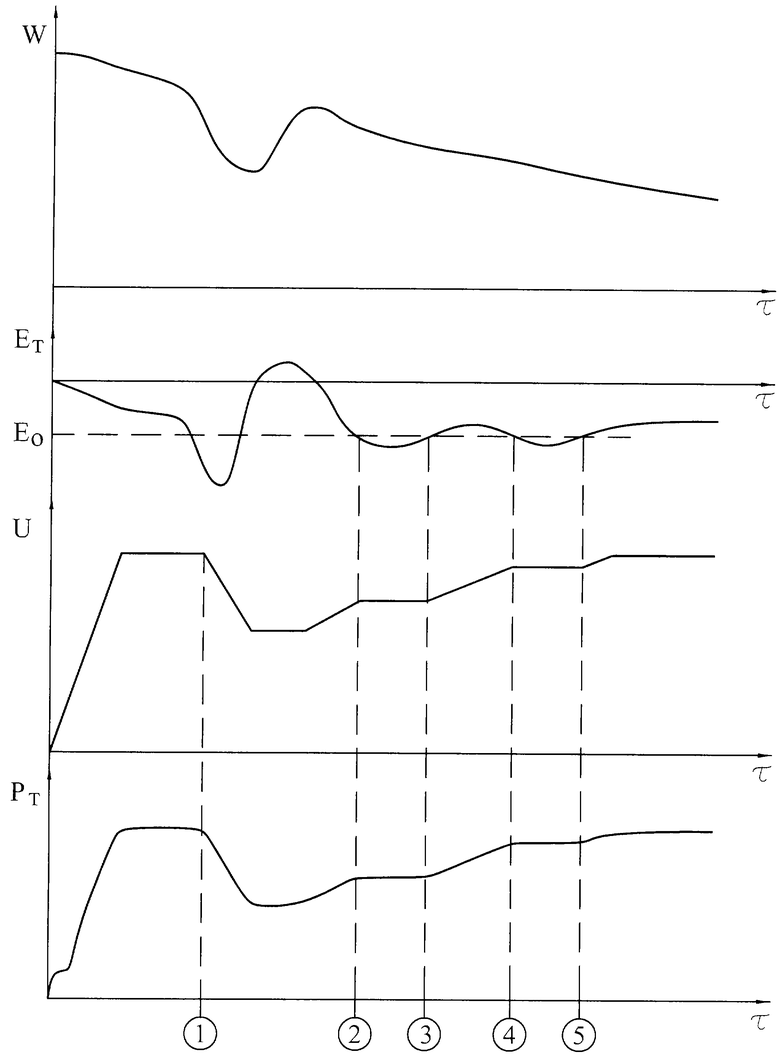
Способ автоматического управления торможением колес транспортного средства, заключающийся в понижении тормозного давления при возникновении “юзовой” ситуации колеса, выдерживании давления на скорректированном уровне и дальнейшем повышении давления, отличающийся тем, что повышение тормозного давления останавливают при достижении замедлением колеса заданной величины, превышающей в 1,5-2,5 раза максимально необходимую величину замедления транспортного средства.
| Способ автоматического управленияКОлЕСНыМи ТОРМОзАМи пРи НАЕздЕ НАучАСТОК C пОНижЕННыМ СцЕплЕНиЕМ | 1975 |
|
SU823195A1 |
| US 4807941 A, 28.02.1989 | |||
| US 4660146 A, 24.04.1987 | |||
| US 4475159 A, 02.10.1984 | |||
| US 4395761 A, 26.07.1983 | |||
| US 4392202 A, 05.07.1983 | |||
| DE 1914765 A1, 25.01.1972. | |||
