Изобретение относится к области машиностроения, в частности к системам управления торможением транспортных средств, и предназначено для использования преимущественно в объектах авиационной техники.
Известен способ автоматического управления торможением колес транспортного средства, заключающийся в формировании сигнала управления, которому соответствует тормозное давление, в зависимости от величин заданного и текущего углового замедления тормозного колеса с учетом его проскальзывания (смотри патент РФ №2108247, кл. В60Т 8/00).
При использовании известного способа в процессе торможения многоколесного транспортного средства в режиме дифференциального торможения (при обжатии левой и правой тормозных педалей на разную величину) за счет незначительной разности угловых скоростей и замедлений левых и правых колес в процессе торможения (поскольку они принадлежат одному транспортному средству) происходит максимальное затормаживание колес, для которых задано большее значение замедления, и полное растормаживание остальных колес. Указанный недостаток известного способа приводит к потере курсовой управляемости в процессе торможения, что в конечном итоге снижает эксплуатационную надежность транспортного средства.
Положительный результат, который может быть достигнут при использовании предлагаемого технического решения, выражается в достижении курсовой управляемости транспортного средства в режиме дифференциального торможения с обеспечением заданных тормозными педалями величин угловых замедлений левых и правых колес транспортного средства.
Указанный результат достигается тем, что сигнал управления, которому соответствует тормозное давление, для каждого колеса вычисляют как интеграл от разности между величиной среднеарифметического значения заданных угловых замедлений колес и величиной текущего углового замедления данного колеса с учетом величины заданного углового замедления данного колеса, а также текущего и среднеарифметического относительных проскальзываний колес:

Esa - среднеарифметическое значение заданных угловых замедлений колес;
Ei - величина текущего углового замедления данного колеса;
Esi - величина заданного углового замедления данного колеса, пропорциональная перемещению тормозной педали;
Si - текущее относительное проскальзывание данного колеса;
Ssa - среднеарифметическое значение текущих относительных проскальзываний колес;
k1 - коэффициент пропорциональности;
k2 - весовой коэффициент.
Благодаря изменению сигнала управления указанным образом замедление транспортного средства в процессе торможения поддерживается на уровне, заданном оператором, обеспечивая одновременно курсовую управляемость транспортного средства в режиме дифференциального торможения, что, в конечном итоге, повышает эксплуатационную надежность транспортного средства.
На чертеже представлены графики изменения заданных угловых замедлений колес, сигналов управления, величин относительного проскальзывания колес, подинтегрального выражения

и тормозных моментов в процессе торможения транспортного средства.
Нажатием тормозных педалей оператор задает необходимую эффективность торможения транспортного средства (величины заданных угловых замедлений левого Es1 и правого Es2 колес). При нажатии левой и правой педалей на одинаковую величину (Es1=Es2) по окончании переходного процесса (точка 1 на чертеже) сигналы управления, которым пропорционально тормозное давление, принимают равные значения (U1=U2), обеспечивая одинаковые тормозные моменты левого и правого колес (Mт1=Мт2) за счет вращения колес с одинаковым проскальзыванием (S1=S2).
При необходимости управления курсом транспортного средства путем дифференциального торможения оператор частично отпускает (точка 2 на чертеже), например, правую педаль (Es1>Es2). При этом за счет изменения соотношений между заданным и среднеарифметическим замедлениями левого (Es1/Esa) и правого (Es2/Esa) колес происходит изменение сигналов управления давлением в левом (U1) и правом (U2) тормозах до тех пор, пока подинтегральное выражение (Δ) для каждого колеса не станет равным нулю в результате коррекции соответствующих соотношений между текущими и среднеарифметическим проскальзываниями левого (S1/Ssa) и правого (S2/Ssa) колес. Изменение сигналов управления (U1>U2) приводит, в свою очередь, к коррекции тормозных моментов левого и правого колес (Мт1>Мт2) до уровней, заданных оператором (точка 3 на чертеже).
Коэффициент (k1) выбирается в зависимости от величин сигналов датчиков хода тормозных педалей и требуемой эффективности торможения при полном обжатии тормозных педалей, а коэффициент (k2) - в зависимости от конкретных значений массы транспортного средства, момента инерции тормозных колес и обеспечиваемого быстродействия исполнительного устройства управления давлением в тормозах колес.
Таким образом, при использовании предлагаемого способа в режиме дифференциального торможения происходит автоматическая настройка необходимых уровней тормозных моментов в каждом колесе, обеспечивая заданную эффективность торможения с учетом заданной разности тормозных моментов в левом и правом колесе при необходимости управления курсом транспортного средства в процессе торможения.
Предлагаемый способ управления торможением транспортного средства может быть реализован, например, путем регулирования давления в тормозах колес гидроусилителями типа "сопло-заслонка", сигналы управления которыми формируются вычислителем на базе микропроцессора типа МК51 (см. Справочник "Однокристальные микроЭВМ", Москва, "Бином", 1994, стр.107) или на базе аналоговой техники по сигналам от датчиков хода тормозных педалей, датчиков тормозного давления и датчиков угловых скоростей колес транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства | 2023 |
|
RU2797069C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2020 |
|
RU2744524C1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2274567C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ САМОЛЕТА | 2017 |
|
RU2709946C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2413635C1 |
Изобретение относится к области машиностроения, а именно системам управления торможением транспортных средств, и предназначено для использования преимущественно в авиационной технике. Дифференциальное управление торможением транспортного средства заключается в формировании сигналов управления, которым соответствуют тормозные давления, в зависимости от величин заданных и текущих угловых замедлений тормозных колес. Сигнал управления для каждого тормозного колеса формируют с учетом разности между отношением величины заданного углового замедления данного колеса к среднеарифметическому значению заданных угловых замедлений колес и отношением текущего относительного проскальзывания данного колеса к среднеарифметическому значению текущих относительных проскальзываний колес. Достигается курсовая управляемость транспортным средством в режиме дифференциального торможения с обеспечением заданных тормозными педалями величин угловых замедлений левых и правых колес транспортного средства. 1 ил.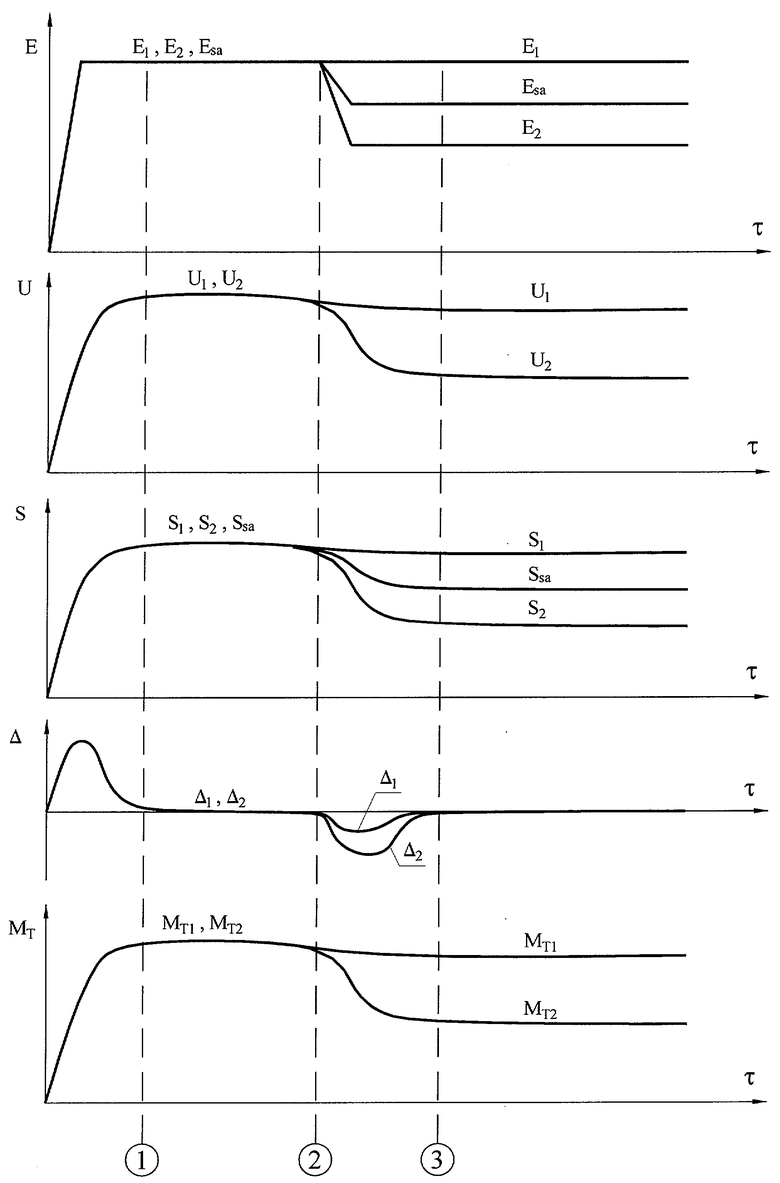
Способ дифференциального управления торможением транспортного средства, заключающийся в формировании сигналов управления, которым соответствуют тормозные давления, в зависимости от величин заданных и текущих угловых замедлений тормозных колес, отличающийся тем, что сигнал управления для каждого тормозного колеса формируют с учетом разности между отношением величины заданного углового замедления данного колеса к среднеарифметическому значению заданных угловых замедлений колес и отношением текущего относительного проскальзывания данного колеса к среднеарифметическому значению текущих относительных проскальзываний колес по следующему закону:

где Esa - среднеарифметическое значение заданных угловых замедлений колес;
Ei - величина текущего углового замедления данного колеса;
Esi - величина заданного углового замедления данного колеса, пропорциональная перемещению тормозной педали;
Si - текущее относительное проскальзывание данного колеса;
Ssa - среднеарифметическое значение текущих относительных проскальзываний колес;
k1 - коэффициент пропорциональности;
k2 - весовой коэффициент.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108247C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ НЕМАГНИТНЫХ ПОКРЫТИЙ ВНУТРИ ТРУБ | 0 |
|
SU329373A1 |
| Тарельчатая пружина | 1972 |
|
SU443213A1 |
| US 2005040286 А, 08.02.2005. | |||

