1
Изобретение относится к захватным устройствам, используемым преимущественно в промышленных работах.
Известен захват манипулятора, содержсцций корпус, зажимные губки, свя-5 ванные с корпусом шарнирными многозвенниками, содержащими ведомые, промежуточные и ведущие звенья, причем последние выполнены в виде упругих элементов переменного сечения по 10 длине 1.
Известный захват отличается высокой надежностью удержания объектов манипулирования, однако из-за неконтролируемости усилий зажима, он не MO-J5 жет удерживать объекты, выполненные из различных материалов без их деформации, что снижает его технологические возможности.
Цель изобретения - расширение тех-20 нологических возможностей захвата.
Для достижения поставленной цели, каждый шарнирный многозвенник снабжен дополнительным ведомым звеном, шарнирно соединенньлм посредством 25 осей с. корпусом и с промежуточным звеном и образующим с корпусом, промежуточным и ведомым звеньями шарнирный параллелограмм, причем в оси, установленной на промежуточном звене, 30
выполнен ггаз, а каждый из упругих -элементов одним концом кинематически связан с приводом, а вторым концом установлен в упомянутом пазу с возможностью осевого перемещения.
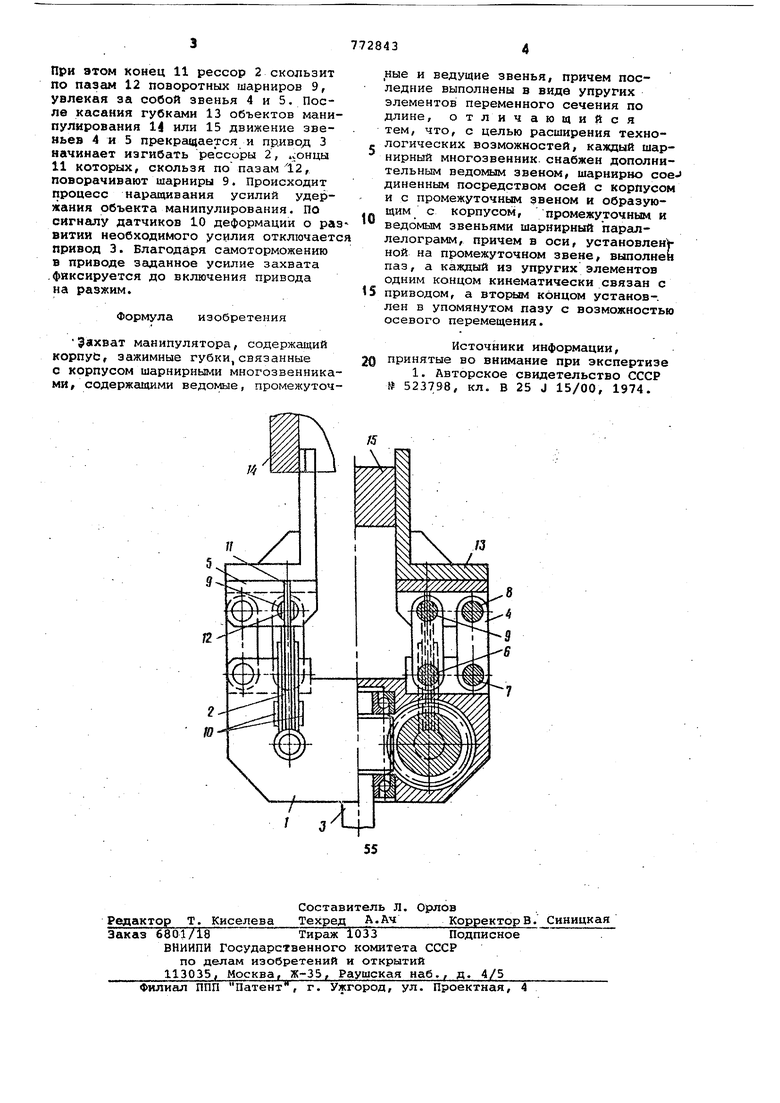
На чертеже представлен захват манипулятора, общий вид.
Захват манипулятора содержит корпус 1, несущий ведущие звенья 2, выполненные в виде двусторонней рессоры, сочлененные между собой самотосялозящимся приводом 3. Корпус 1 совместно с вeдo ttJми звеньями 4 и промежуточными звеньями 5 и шарнирами б - 9 образуют механизмы шарнирных параллелограммов. Рессоры 2 снабжены датчиками 10 деформации, а их концы 11 установлены с возможностью осевого перемещения в пазах 12 поворотных шарниров 9. На промежуточных звеньях 5 закреплены губки 13, контактирующие с объектс1ми манипулирования 14 и 15 соответственно охбатываемыми или охватывающими поверхностями губок.
Работа захвата осуществляется следующим образом.
При включении привода 3 губки 13 плоскопараллельно перемещаются к объектам манипулирования 14 или 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1976 |
|
SU558789A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захват манипулятора | 1980 |
|
SU973354A1 |
| Захват | 1975 |
|
SU550280A2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Захват | 1972 |
|
SU440249A1 |
