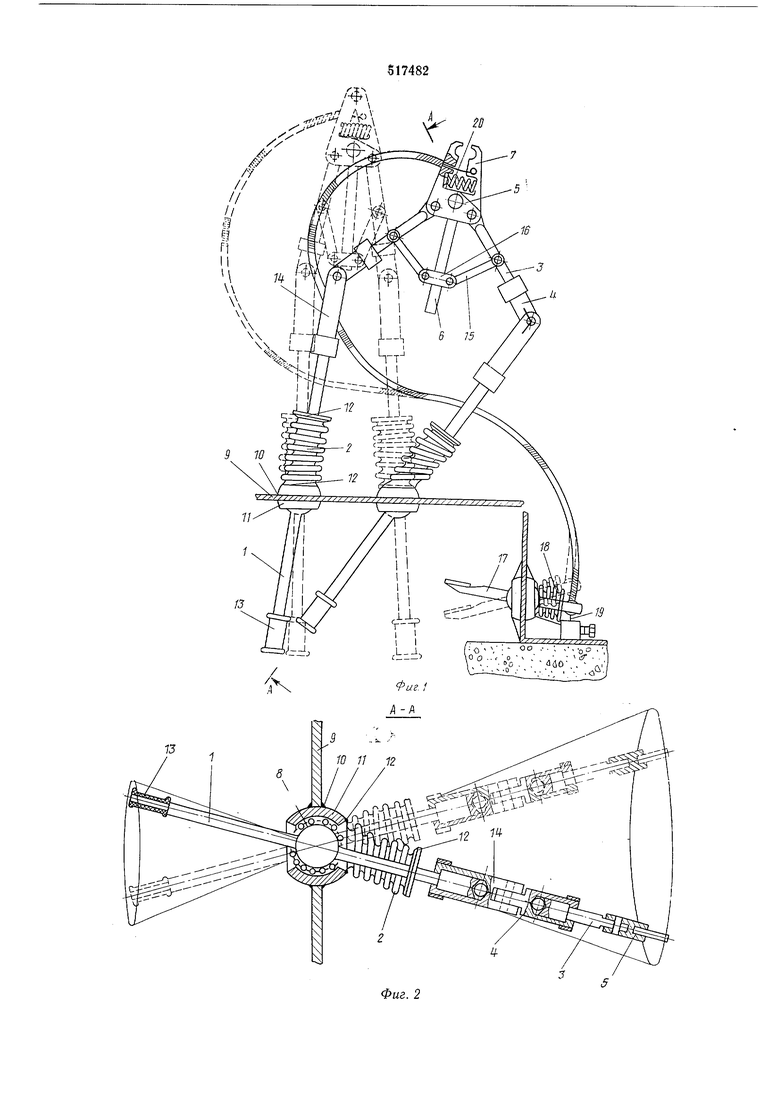
герметизирован аналогично вводу рычага 1 с помощью сильфона 18. Связь между рычагом 17 и губ1ками 7 осуществляется посредством гибкого, тросика 19. Для разведения губок 7 между ними имеется пружииа 20.
Манипулятор работает следующим образом.
Поворот корпуса рабочего органа 5 с губками 7 осуществляется путем опускания одной из задающих рукояток 13 нри одновременном поднятии другой.
Когда нужно свести губки 7 (см. фиг. 1), чтобы ВЗЯТЬ предмет, оператор нажимает ногой на силовой рычаг 17. При этом силовой рычаг тянет тро-сик 19, тросик в свою очередь тя:нет ущко тубКИ и, таким образом сводит губки и зажимает предмет. При опускании силового рычага 17 пружина 20 разводит губки 7 и опускает предмет.
Благодаря щарнирному ромбу, образованному валами 3 и рычагами 15, направшяющая 6 всегда направлена по биссектрисе угла между валами 3, а так как направляющая 6 закреплена на корпусе рабочего органа 5, то последний также всегда ориентирован по
этой биссектрисе, т. е. положение и ориентировка рабочего органа 5 всегда однозначно определены положением рычагов 1.
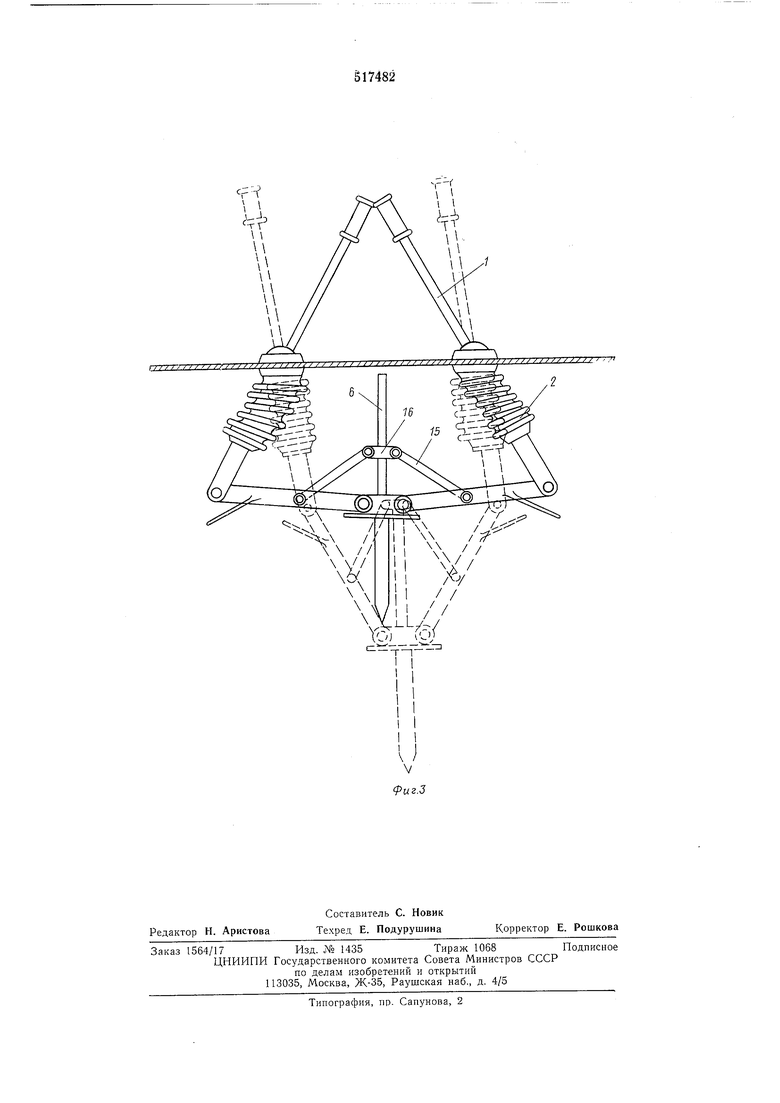
Предлагаемый манипулятор может иметь рабочий орган любого характера. Так, например, па фиг. 3 изобрал ен манипулятор с ломиком в качестве рабочего органа.
Формула изобретения
Копирующий манипулятор, состоящий из двуплечих рычагов, несущих каждый рабочий орган и шарнирнО установленных в стенке изолированной камеры, от личающийс я тем, что, с пелью повышения грузоподъемности, он выполнен в виде одного рабочего органа, кинематически соединенного с двуплечими рычагами, при этом каждый рычаг щарнирно соединен с кронщтейном, снабженным соосно расположенным валом, свободный конец которого также щарнирно закреплен на корпусе рабочего органа, причем валы связаны между собой двумя рычагами и ползуном, направляющая которого закреплена .на корпусе рабочего органа.
/4 .
V

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОРПУСОВ СУДОВ | 1969 |
|
SU243424A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Подвесной манипулятор | 1972 |
|
SU559819A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Машина для заготовки пневой древесины | 1979 |
|
SU869682A1 |