Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке для выполнения автономной парковки.
Уровень техники
[0002] Известны способы обнаружения окружения вокруг лазерного датчика расстояния несколько раз при перемещении лазерного датчика расстояния и синтезирования результатов из обнаруженных значений таким образом, чтобы формировать карту окружения в качестве изображения (см. патентный документ 1).
Список цитируемых источников
Патентные документы
[0003] Патентный документ 1: JP 2005-326944 A
Раскрытие изобретения
Техническая задача
[0004] Когда окружающая обстановка в целевом положении парковки во время парковки обнаруживается и сохраняется для рассмотрения во время автономной парковки, окружающая обстановка, не подходящая для рассмотрения, также может сохраняться посредством способа, раскрытого в патентном документе 1, в зависимости от обстановки при парковке.
[0005] С учетом вышеприведенной проблемы, настоящее изобретение предусматривает способ помощи при парковке и устройство помощи при парковке, обеспечивающие возможность сохранения окружающей обстановки в целевом положении парковки, подходящей для рассмотрения во время автономной парковки.
Решение задачи
[0006] Аспект настоящего изобретения предусматривает способ помощи при парковке и устройство помощи при парковке для сохранения окружающей обстановки в целевом положении парковки для рассмотрения при выполнении автономной парковки в целевом положении парковки. Способ и устройство обнаруживают окружающую обстановку в целевом положении парковки и представляют обнаруженную окружающую обстановку пользователю. Способ и устройство принимают определение того, является ли представленная окружающая обстановка подходящей, вводимое пользователем, и сохраняет окружающую обстановку, когда пользователь вводит определение пригодности.
Краткое описание чертежей
[0007] Фиг. 1 является блок-схемой, иллюстрирующей устройство помощи при парковке согласно первому варианту осуществления настоящего изобретения;
Фиг. 2A является принципиальной схемой, показывающей периферию целевого положения парковки согласно первому варианту осуществления настоящего изобретения;
Фиг. 2B является принципиальной схемой, показывающей состояние парковки в целевом положении парковки;
Фиг. 3 является принципиальной схемой, иллюстрирующей карту окружения согласно первому варианту осуществления настоящего изобретения;
Фиг. 4A является принципиальной схемой, показывающей периферию целевого положения парковки согласно сравнительному примеру;
Фиг. 4B является принципиальной схемой, показывающей состояние, в котором карта окружения не может формироваться корректно;
Фиг. 5 является блок-схемой, иллюстрирующей способ помощи при парковке согласно первому варианту осуществления настоящего изобретения;
Фиг. 6 является принципиальной схемой, иллюстрирующей карту окружения согласно первому модифицированному примеру первого варианта осуществления настоящего изобретения;
Фиг. 7 является принципиальной схемой, показывающей пример представления во время автономной парковки согласно второму модифицированному примеру первого варианта осуществления настоящего изобретения;
Фиг. 8 является принципиальной схемой, иллюстрирующей способ формирования интегрированной карты согласно второму варианту осуществления настоящего изобретения;
Фиг. 9 является принципиальной схемой, иллюстрирующей другой способ формирования интегрированной карты согласно второму варианту осуществления настоящего изобретения;
Фиг. 10 является принципиальной схемой, иллюстрирующей другой способ формирования интегрированной карты согласно второму варианту осуществления настоящего изобретения;
Фиг. 11 является принципиальной схемой, иллюстрирующей интегрированную карту согласно второму варианту осуществления настоящего изобретения; и
Фиг. 12 является блок-схемой, иллюстрирующей способ помощи при парковке согласно второму варианту осуществления настоящего изобретения.
Осуществление изобретения
[0008] Ниже в данном документе описаны первый и второй варианты осуществления согласно настоящему изобретению со ссылкой на чертежи. В нижеприведенных описаниях чертежей, одинаковые или аналогичные элементы указываются одинаковыми или аналогичными ссылочными позициями. Следует понимать, что чертежи проиллюстрированы схематично, и взаимосвязи толщин и плоских размеров, а также количественные отношения соответствующих толщин не нарисованы в масштабе. Также следует понимать, что взаимосвязи или количественные отношения размеров между соответствующими чертежами могут отличаться друг от друга. Первый и второй варианты осуществления, описанные ниже, иллюстрируют устройство и способ для осуществления технических идей настоящего изобретения, и технические идеи настоящего изобретения не имеют намерение быть ограниченными материалами, формами, конструкциями или компоновками элементов, как описано в данном документе. Технические идеи настоящего изобретения должны охватывать различные модификации, попадающие в пределы объема изобретения, заданного посредством нижеприведенной прилагаемой формулы изобретения.
[0009] Первый вариант осуществления
Конфигурация устройства помощи при парковке
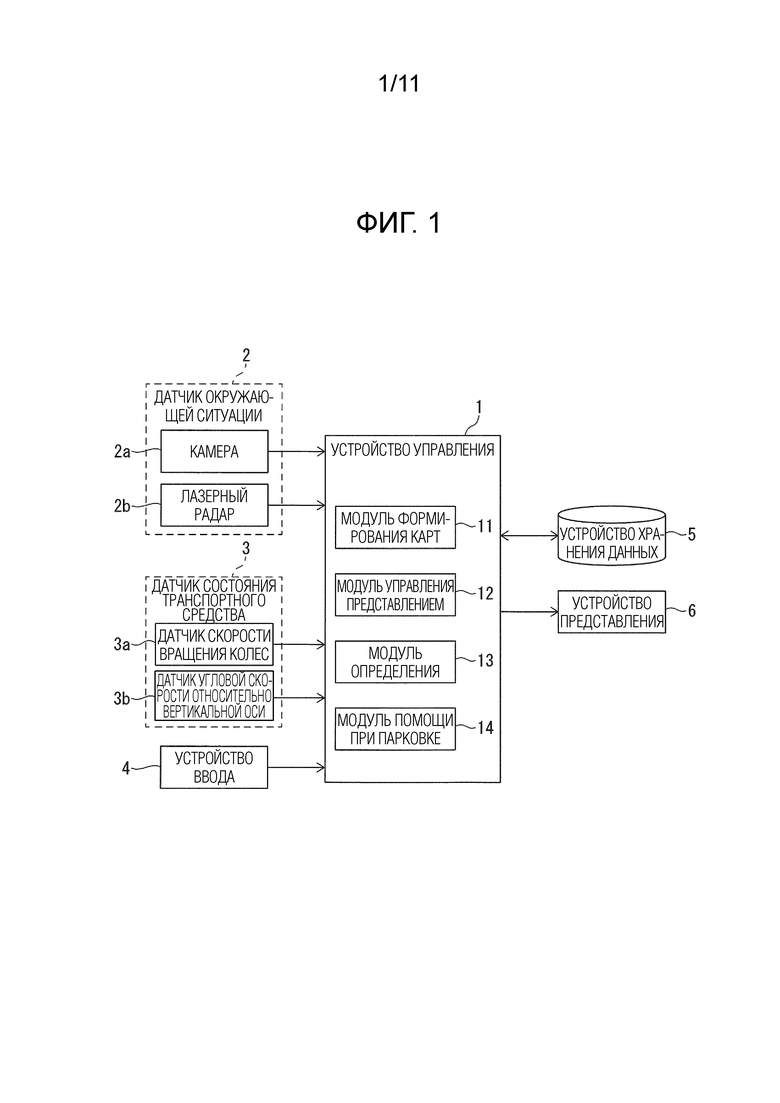
Устройство помощи при парковке согласно первому варианту осуществления настоящего изобретения может устанавливаться в транспортном средстве (далее в этом документе транспортное средство, оснащенное устройством помощи при парковке согласно первому варианту осуществления настоящего изобретения, называется «транспортным средством-носителем»). Устройство помощи при парковке согласно первому варианту осуществления настоящего изобретения включает в себя устройство 1 управления (контроллер), датчик 2 окружающей обстановки, датчик 3 состояния транспортного средства, устройство (интерфейс) 4 ввода, устройство 5 хранения данных и устройство 6 представления, как проиллюстрировано на фиг. 1.
[0010] Датчик 2 окружающей обстановки обнаруживает окружающую обстановку около транспортного средства-носителя, включающую в себя обстановку впереди, обстановку сзади и обстановку сбоку транспортного средства-носителя. Примеры окружающей обстановки около транспортного средства-носителя, которую может обнаруживать датчик 2 окружающей обстановки, включают в себя стационарные объекты (помехи), такие как здания, стены, опоры линии электропередач, дорожные знаки, другие транспортные средства и велосипеды, сигнальные линии дорожной разметки на дорогах и характеристические точки (ориентиры), такие как парковочные рамки. Хотя первый вариант осуществления иллюстрирует датчик 2 окружающей обстановки, включающий в себя камеру 2a и лидар 2b, тип и число датчиков 2 окружающей обстановки не ограничены этой иллюстрацией.
[0011] Датчик 3 состояния транспортного средства включает в себя датчик 3a скорости вращения колес и датчик 3b угловой скорости относительно вертикальной оси. Датчик 3a скорости вращения колес определяет скорость вращения колес транспортного средства-носителя и выводит определенную скорость вращения колес в качестве информации одометрии в устройство 1 управления. Датчик 3b угловой скорости относительно вертикальной оси определяет темп изменения угла относительно вертикальной оси (угловой скорости относительно вертикальной оси) транспортного средства-носителя и выводит определенную угловую скорость относительно вертикальной оси в качестве информации одометрии в устройство 1 управления.
[0012] Устройство 4 ввода принимает различные виды информации с инструкциями от пользователя. Устройство 4 ввода может представлять собой сенсорную панель, переключатели или кнопки устройства 6 представления. Устройство 4 ввода может быть переключателями или кнопками, предусмотренными на центральной консоли, например, отдельно из устройства 6 представления. В качестве альтернативы, устройство 4 ввода может представлять собой устройство речевого ввода.
[0013] Устройство 5 хранения данных может представлять собой любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных и может включать в себя регистр и кэш-память. Устройство 5 хранения данных может устанавливаться в устройстве 1 управления.
[0014] Устройство 6 представления может представлять собой навигационное устройство, оснащенное дисплеем, таким как жидкокристаллический дисплей. Устройство 6 представления устанавливается в некотором положении в пассажирском салоне транспортного средства, к примеру, на приборной панели, так что пользователь может легко распознавать устройство 6 представления визуально.
[0015] Устройство 1 управления представляет собой контроллер, такой как электронный блок управления (ECU), который может представлять собой компьютер, включающий в себя центральный процессор (CPU) и устройство хранения данных, или процессор, эквивалентный компьютеру. Устройство 1 управления может включать в себя программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA), или может представлять собой функциональную логическую схему, размещаемую в полупроводниковой интегральной схеме общего назначения.
[0016] Устройство помощи при парковке согласно первому варианту осуществления настоящего изобретения распознает окружающую обстановку в целевом положении парковки, обнаруженную посредством датчика 2 окружающей обстановки во время однократной парковки или многократной парковки, и сохраняет окружающую обстановку в устройстве 5 хранения данных. При использовании в данном документе, термин «однократная парковка», например, означает операцию до тех пор, пока транспортное средство-носитель не достигнет целевого положения парковки. Термин «однократная парковка» также включает в себя операцию, при которой транспортное средство-носитель движется около целевого положения парковки, и операцию, при которой транспортное средство-носитель поворачивает руль в одном направлении и в другом направлении около целевого положения парковки до того, как транспортное средство-носитель достигнет целевого положения парковки в состоянии, в котором датчик 2 окружающей обстановки может обнаруживать окружающую обстановку в целевом положении парковки.
[0017] При использовании в данном документе, термин «многократная парковка» означает состояние повторения однократной парковки, но время повторения может включать в себя любой случай, к примеру, случай повторения парковки сразу после первой парковки и случай парковки на следующий день после первой парковки. Многократная парковка может включать в себя операции парковки одинаковым способом или операции парковки различными способами. Например, первая парковка из двух операций парковки может представлять собой операцию достижения целевого положения парковки, и вторая парковка может представлять собой операцию движения около целевого положения парковки. Первый вариант осуществления настоящего изобретения проиллюстрирован со случаем однократной парковки.
[0018] К окружающей обстановки в целевом положении парковки, сохраненной в блоке 5 хранения в качестве распознанных результатов, полученных посредством устройства помощи при парковке согласно первому варианту осуществления настоящего изобретения, можно обращаться во время последующей или более поздней парковки. «Последующая или более поздняя парковка» может выполняться в любое время, к примеру, в момент времени сразу после распознавания окружающей обстановки в целевом положении парковки либо на следующий или в более поздний день после распознавания окружающей обстановки в целевом положении парковки. Операция парковки для «последующей или более поздней парковки» включает в себя операцию направления к целевому положению парковки, к примеру, операцию, при которой транспортное средство-носитель достигает целевого положения парковки, и операции, при которой транспортное средство-носитель движется около целевого положения парковки.
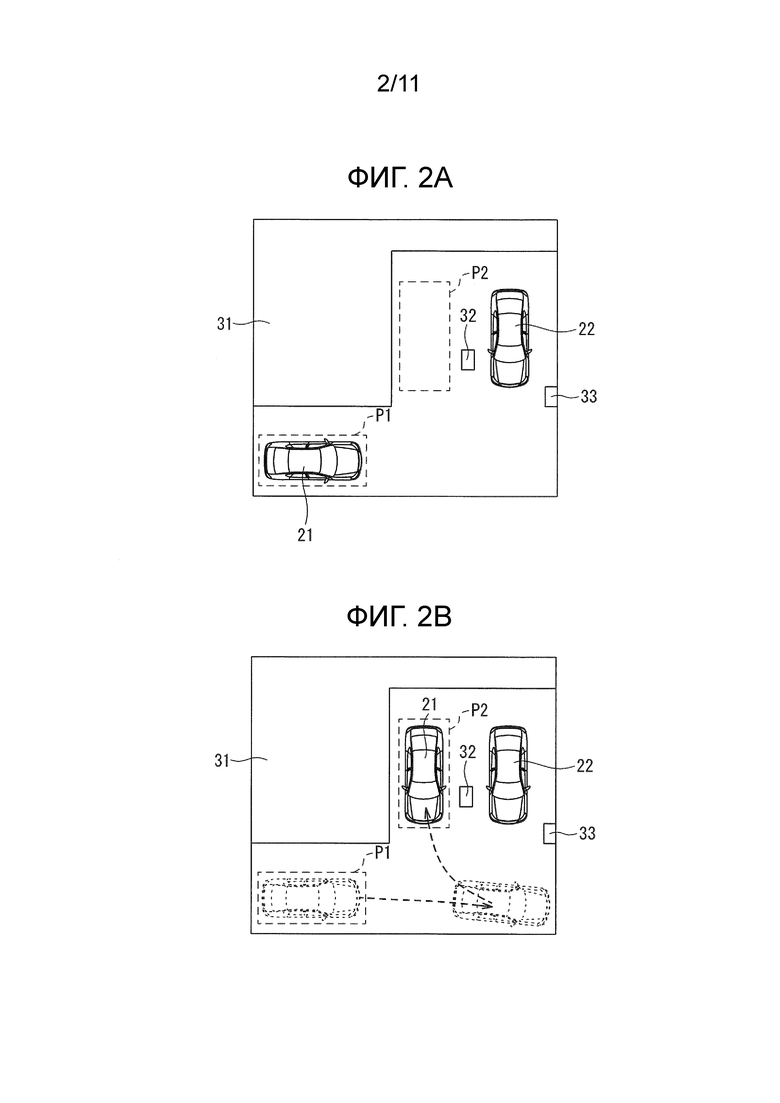
[0019] Ниже проиллюстрирован способ распознавания окружающей обстановки в целевом положении парковки со ссылкой на фиг. 2A и фиг. 2B. Фиг. 2A иллюстрирует случай, в котором транспортное средство-носитель 21, расположенное в положении P1, которое представляет собой положение начала движения транспортного средства, паркуется в целевом положении P2 парковки. Помеха 31, которая представляет собой здание, помехи 32 и 33, которые представляют собой несущие конструкции гаража, и другое транспортное средство 22, припаркованное в гараже, присутствуют около целевого положения P2 парковки. Пользователь вводит информацию начального положения P1 парковки через устройство 4 ввода. Затем пользователь начинает движение из начального положения P1 парковки, чтобы припарковать транспортное средство-носитель 21 в целевом положении P2 парковки, как указано стрелками пунктирных линий на фиг. 2B. Датчик 2 окружающей обстановки обнаруживает окружающую обстановку, включающую в себя помехи 31, 32 и 33 около целевого положения P2 парковки во время парковки. Когда парковка в целевом положении P2 парковки завершается, пользователь вводит информацию целевого положения P2 парковки в устройство 1 управления через устройство 4 ввода. Пользователь может парковать транспортное средство-носитель 21 вручную, или устройство помощи при парковке может управлять парковкой транспортного средства-носителя 21.
[0020] Устройство 1 управления, проиллюстрированное на фиг. 1, функционально включает в себя блок 11 формирования карт, блок 12 управления представлением, блок 13 определения и блок 14 помощи при парковке. Блок 11 формирования карт формирует карту окружения (картографические данные окружения), включающую в себя окружающую обстановку в целевом положении парковки, в соответствии с окружающей обстановкой в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки, и сохраняет сформированную карту окружения в устройстве 5 хранения данных. Например, блок 11 формирования карт формирует карту окружения на основе окружающей обстановки, обнаруженной посредством датчика 2 окружающей обстановки, и информации одометрии, такой как скорость вращения колес и угловая скорость относительно вертикальной оси, определенные посредством датчика 3 состояния транспортного средства.
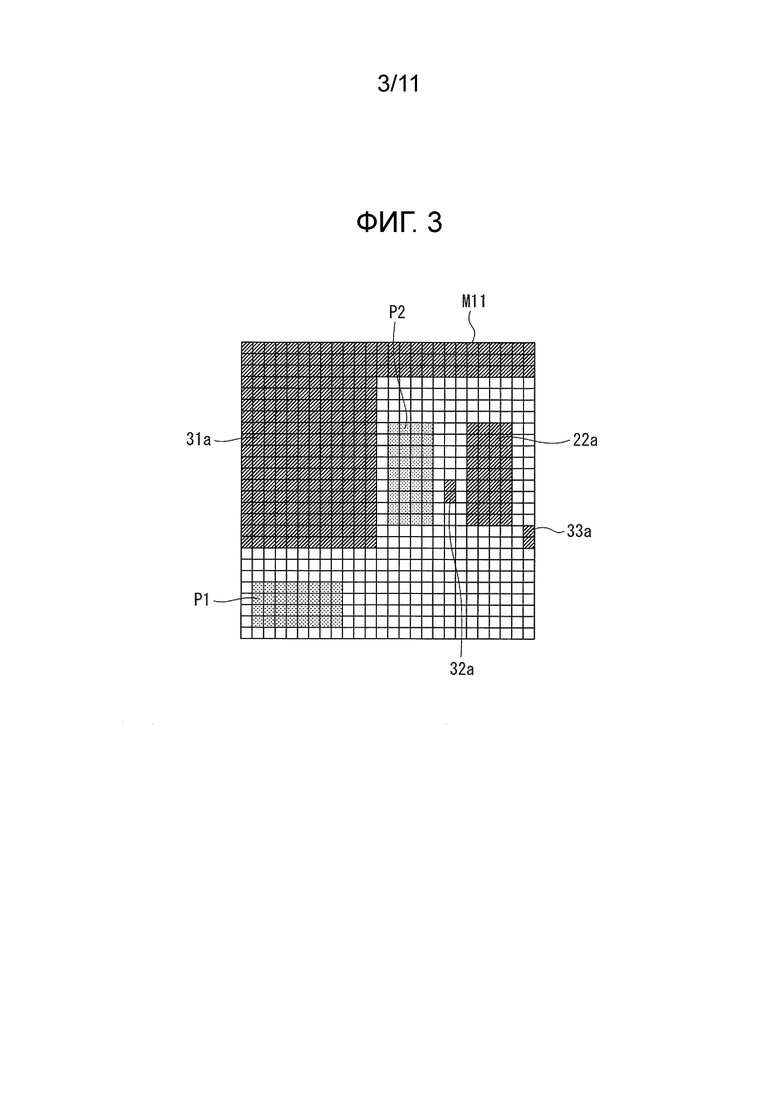
[0021] Фиг. 3 иллюстрирует карту M11 окружения, сформированную посредством блока 11 формирования карт, соответствующую круговой области целевого положения P2 парковки, проиллюстрированной на фиг. 2A и фиг. 2B. Карта M11 окружения включает в себя помехи 31a, 32a и 33a, присутствующие около целевого положения P2 парковки. Помехи 31a, 32a и 33a на карте M11 окружения надлежащим образом соответствуют помехам 31, 32 и 33, проиллюстрированным на фиг. 2A и фиг. 2B. Карта M11 окружения, проиллюстрированная на фиг. 3, например, представляет собой пространственную карту, состоящую из множества точек, но может представлять собой любую карту, такую как неискаженное изображение, подвергнутое ортоскопической коррекции посредством соединения изображений вида «с высоты птичьего полета».
[0022] Блок 11 формирования карт задает начальное положение P1 парковки на карте M11 окружения в соответствии с информацией начального положения P1 парковки, вводимой через устройство 4 ввода, и сохраняет заданное начальное положение P1 парковки в устройстве 5 хранения данных. Блок 11 формирования карт также задает целевое положение P2 парковки на карте M11 окружения в соответствии с информацией целевого положения P2 парковки, вводимой через устройство 4 ввода, и сохраняет заданное целевое положение P2 парковки в устройстве 5 хранения данных.
[0023] Фиг. 4A иллюстрирует случай, в котором парковочные рамки 41 размещены одинаково с регулярными интервалами, например на стоянке в многоквартирном доме или в коммерческом объекте, и карта окружения формируется во время парковки в целевом положении 41a парковки. Если расстояние между парковочными рамками 41 и их взаимное расположение сохраняются для формирования карты окружения посредством использования способа, раскрытого в патентном документе 1, карта окружения может приводить к локальному решению, например, проиллюстрированному на фиг. 4b, поскольку парковочные рамки 41 размещены одинаково с регулярными интервалами, что приводит к тому, что карта окружения указывает парковочные рамки 42 и 43, смещенные от фактической парковочной рамки 41. В результате могут задаваться целевые положения 41b и 41c парковки, смещенные от фактического целевого положения 41a парковки. Такая же проблема может возникать, когда пользователь неправильно паркует транспортное средство-носитель в парковочной рамке, отличной от целевого положения 41a парковки, проиллюстрированного на фиг. 4A.
[0024] Блок 12 управления представлением, проиллюстрированный на фиг. 1, инструктирует устройство 6 представления представлять окружающую обстановку в целевом положении парковки, обнаруженную посредством датчика 2 окружающей обстановки, для запроса у пользователя ввода в отношении пригодности или непригодности окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки. Например, блок 12 управления представлением инструктирует устройство 6 представления представлять карту M11 окружения, включающую в себя начальное положение P1 парковки и целевое положение P2 парковки, проиллюстрированные на фиг. 3, в качестве примера окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки, для запроса у пользователя ввода в отношении пригодности или непригодности карты M11 окружения, включающей в себя начальное положение P1 парковки и целевое положение P2 парковки. Блок 12 управления представлением может побуждать пользователя выполнять ввод в отношении пригодности или непригодности посредством представления текстовой информации или голосовой информации, такой как «Окружающая обстановка в целевом положении парковки является корректной?» или «Введите пригодность или непригодность окружающей обстановки в целевом положении парковки», одновременно с представлением окружающей обстановки в целевом положении парковки на устройстве 6 представления.
[0025] Устройство 4 ввода принимает ввод пригодности или непригодности окружающей обстановки в целевом положении парковки от пользователя, когда окружающая обстановка в целевом положении парковки представляется в устройстве 6 представления. Пользователь визуально проверяет карту M11 окружения, включающую в себя начальное положение P1 парковки и целевое положение P2 парковки, представленные в устройстве 6 представления, и определяет пригодность или непригодность карты M11 окружения (к примеру, присутствие или отсутствие помех 31a, 32a и 33a или другого транспортного средства 22a на карте M11 окружения либо пригодность или непригодность положений этих объектов), пригодность или непригодность начального положения P1 парковки и пригодность или непригодность целевого положения P2 парковки. Когда пользователь определяет, что по меньшей мере одно из карты M11 окружения, начального положения P1 парковки и целевого положения P2 парковки не является подходящим, пользователь вводит определение непригодности через устройство 4 ввода. Когда пользователь определяет, что карта M11 окружения, начальное положение P1 парковки и целевое положение P2 парковки являются подходящими, пользователь вводит определение пригодности через устройство 4 ввода.
[0026] Блок 13 определения определяет пригодность или непригодность окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки, в соответствии с определением пригодности или непригодности, введенным пользователем через устройство 4 ввода. Когда определение пригодности вводится пользователем, блок 13 определения определяет, что окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, подходит для рассмотрения во время автономной парковки, с тем чтобы использовать и сохранять окружающую обстановку в устройстве 5 хранения данных в качестве данных для рассмотрения во время автономной парковки. Например, блок 13 определения может непосредственно сохранять, в устройстве 5 хранения данных, данные окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки. В качестве альтернативы, блок 13 определения может сохранять, в устройстве 5 хранения данных, карту M11 окружения, включающую в себя начальное положение P1 парковки и целевое положение P2 парковки, в качестве окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки.
[0027] Когда определение непригодности вводится пользователем, блок 13 определения определяет то, что окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, не подходит для рассмотрения во время автономной парковки, и не использует или сохраняет окружающую обстановку в устройстве 5 хранения данных в качестве данных для рассмотрения во время автономной парковки. Блок 13 определения, например, может одновременно инструктировать устройство 6 представления представлять, что окружающая обстановка в целевом положении парковки должна распознаваться снова, или что карта M11 окружения, включающая в себя начальное положение P1 парковки и целевое положение P2 парковки, должна редактироваться.
[0028] Блок 14 помощи при парковке считывает данные окружающей обстановки в целевом положении парковки, сохраненной в устройстве 5 хранения данных во время последующей или более поздней парковки в целевом положении парковки, и выполняет автономную парковку с использованием данных окружающей обстановки в целевом положении парковки. Например, блок 14 помощи при парковке оценивает (инициализирует) положение транспортного средства-носителя 21 на карте M11 окружения в соответствии с информацией с инструкциями, введенной пользователем через устройство 4 ввода. Блок 14 помощи при парковке формирует целевой намеченный путь для парковки в целевом положении P2 парковки, начинающийся с оцененного положения транспортного средства-носителя 21 на карте M11 окружения. Блок 14 помощи при парковке выводит управляющий сигнал для выполнения автономной парковки по сформированному целевому намеченному пути в различные типы исполнительных механизмов в транспортном средстве-носителе 21. Блок 14 помощи при парковке может быть предусмотрен в качестве устройства помощи при парковке отдельно от устройства 1 управления.
[0029] Способ помощи при парковке
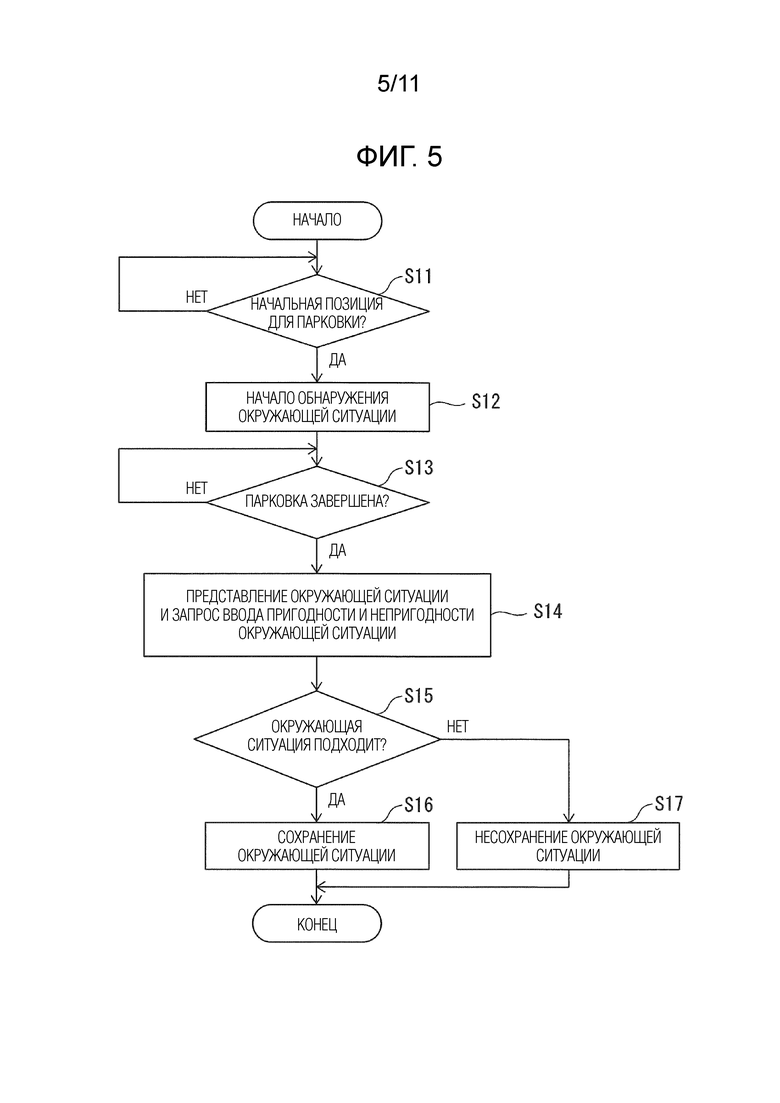
Ниже проиллюстрирован способ помощи при парковке согласно первому варианту осуществления настоящего изобретения со ссылкой на блок-схему на фиг. 5.
[0030] На этапе S11, блок 11 формирования карт определяет, достигло ли транспортное средство-носитель начального положения парковки, в соответствии с информацией с инструкциями, введенной пользователем через устройство 4 ввода, и процесс переходит к этапу S12, когда определено, что транспортное средство-носитель достигло начального положения парковки. Вместо инструкции пользователя через устройство 4 ввода, навигационное устройство, такое как устройство 6 представления может предварительно сохранять информацию о положении целевого положения парковки таким образом, что блок 11 картографической информации определяет, достигло ли транспортное средство-носитель начального положения парковки, путем обращения к информации о положении транспортного средства-носителя, полученной посредством сигнала GPS, например, для представления результата определения пользователю. Например, определяется, что транспортное средство-носитель достигло начального положения парковки, когда транспортное средство-носитель въезжает в область на заданном прямом расстоянии от целевого положения парковки.
[0031] На этапе S12, пользователь начинает парковку вручную в целевом положении парковки из начального положения парковки. Операция парковки может управляться посредством использования традиционного устройства помощи при парковке с использованием изображений вида «с высоты птичьего полета». Датчик 2 окружающей обстановки обнаруживает окружающую обстановку в целевом положении парковки, включающую в себя помехи и характеристические точки, присутствующие около целевого положения парковки. Датчик 3 состояния транспортного средства обнаруживает информацию одометрии, включающую в себя импульс скорости вращения колес и угловую скорость относительно вертикальной оси.
[0032] На этапе S13, блок 11 формирования карт определяет, достигло ли транспортное средство-носитель целевого положения парковки, и завершает парковку в соответствии с операцией переключения передач или операцией нажатия парковочного тормоза, выполненной пользователем. Когда определено, что транспортное средство-носитель завершает парковку, процесс переходит к этапу S14.
[0033] На этапе S14, блок 11 формирования карт формирует карту окружения, включающую в себя объекты около целевого положения парковки, на основе информации одометрии, обнаруженной посредством датчика 3 состояния транспортного средства при перемещении, информации о положении объектов и характеристических точек окружающей обстановки, обнаруженной посредством датчика 2 окружающей обстановки, и сохраняет карту окружения в устройстве 5 хранения данных. Блок 12 управления представлением инструктирует устройство 6 представления представлять окружающую обстановку в целевом положении парковки, такую как карта окружения, сформированная посредством блока 11 формирования карт. Устройство 4 ввода принимает ввод определения того, является ли окружающая обстановка в целевом положении парковки подходящей, когда окружающая обстановка в целевом положении парковки представляется в устройстве 6 представления. Пользователь вводит определение пригодности или непригодности окружающей обстановки в целевом положении парковки, представленной в устройстве 6 представления, через устройство 4 ввода.
[0034] На этапе S15, блок 13 определения определяет, является ли окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, подходящей для рассмотрения во время автономной парковки, в соответствии с определением пригодности или непригодности, введенным пользователем через устройство 4 ввода. Когда определение пригодности вводится пользователем, блок 13 определения определяет то, что окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, подходит для рассмотрения во время автономной парковки, и процесс переходит к этапу S16. На этапе S16 блок 13 определения использует и сохраняет окружающую обстановку в устройстве 5 хранения данных в качестве данных (распознанных результатов) для рассмотрения во время автономной парковки.
[0035] Когда определение непригодности вводится пользователем на этапе S15, блок 13 определения определяет то, что окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, не подходит для рассмотрения во время автономной парковки, и процесс переходит к этапу S17. На этапе S17, блок 13 определения не использует или сохраняет окружающую обстановку в устройстве 5 хранения данных в качестве данных (распознанных результатов) для рассмотрения во время автономной парковки.
[0036] Программа помощи при парковке согласно первому варианту осуществления настоящего изобретения выполняется посредством компьютера, составляющего устройство 1 управления, посредством процесса способа помощи при парковке, проиллюстрированного на фиг. 5. Программа помощи при парковке согласно первому варианту осуществления настоящего изобретения, например, может сохраняться в устройстве 5 хранения данных.
[0037] Согласно первому варианту осуществления настоящего изобретения, окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, такая как карта окружения, представляется посредством устройства 6 представления при сохранении окружающей обстановки в целевом положении парковки и выполнении автономной парковки с использованием сохраненной окружающей обстановки в целевом положении парковки. Окружающая обстановка в целевом положении парковки сохраняется, когда пользователь определяет, что представленная окружающая обстановка в целевом положении парковки является подходящей. Окружающая обстановка в целевом положении парковки, подходящая для рассмотрения во время автономной парковки, в силу этого может сохраняться. Соответственно, автономная парковка может выполняться с высокой точностью посредством использования сохраненной окружающей обстановки в целевом положении парковки.
[0038] Поскольку окружающая обстановка, включающая в себя целевое положение парковки, представляется пользователю, когда карта окружения, показывающая окружающую обстановку в целевом положении парковки, обнаруженную посредством датчика 2 окружающей обстановки, представляется посредством устройства 6 представления, пользователь может легко распознавать взаимное расположение целевого положения парковки и помех, присутствующих около целевого положения парковки, при вводе пригодности или непригодности представленной окружающей обстановки.
[0039] Первый модифицированный пример первого варианта осуществления настоящего изобретения
Первый модифицированный пример первого варианта осуществления настоящего изобретения проиллюстрирован со случаем, в котором который блок 12 управления представлением указывает, в дополнение к целевому положению парковки, альтернативы целевого положения парковки, отличающиеся от целевого положения парковки на карте окружения, сформированной посредством блока 11 формирования карт, в качестве окружающей обстановки в целевом положении парковки, обнаруженной посредством кругового датчика 2.
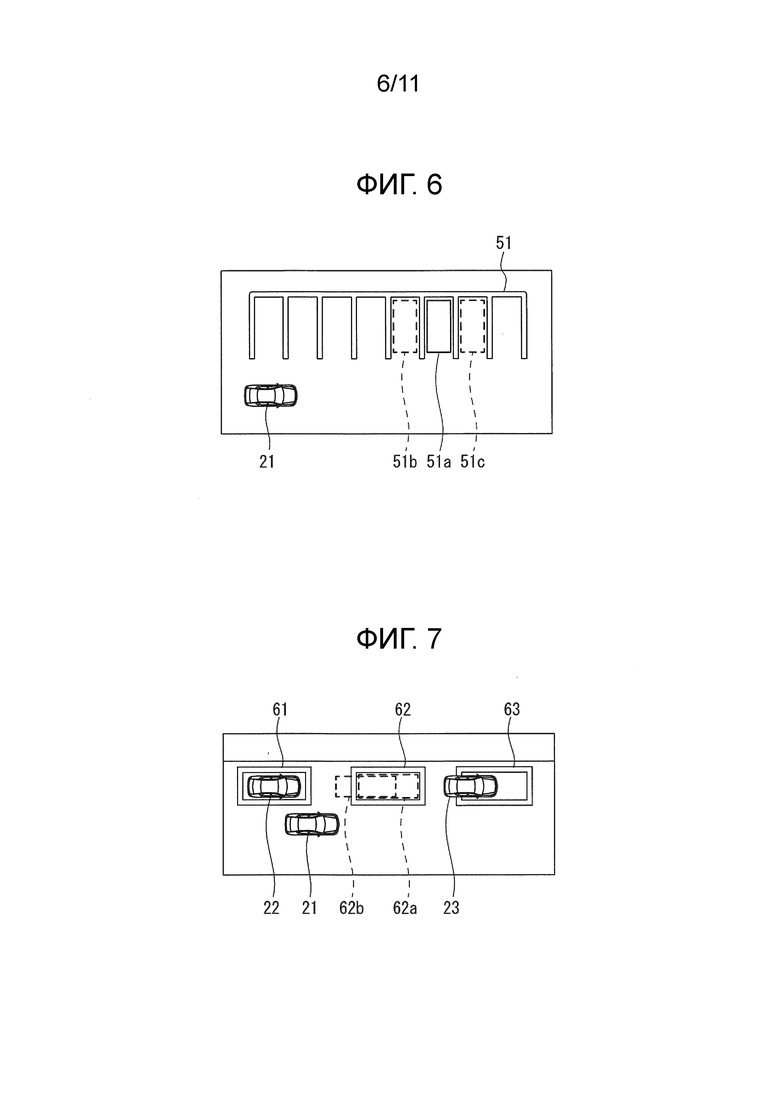
[0040] Как проиллюстрировано на фиг. 6, блок 12 управления представлением представляет целевое положение 51a парковки и альтернативы 51b и 51c целевого положения парковки, отличные от целевого положения 51a парковки, на карте окружения, включающей в себя парковочные рамки 51. Альтернатива 51b или 51c целевого положения парковки представляет собой положение, которое может представлять собой корректное целевое положение парковки, когда целевое положение 51a парковки обнаруживается посредством датчика 2 окружающей обстановки некорректно. Целевое положение 51a парковки представляется цветом, отличным от альтернатив 51b и 51c целевого положения парковки, чтобы иметь возможность отличать их друг от друга. Пользователь вводит пригодность или непригодность карты окружения, включающей в себя парковочные рамки 51 и целевое положение 51a парковки, с учетом вероятности того, что альтернатива 51b или 51c целевого положения парковки может представлять собой корректную целевое положение парковки.
[0041] Согласно первому модифицированному примеру первого варианта осуществления настоящего изобретения, окружающая обстановка, включающая в себя альтернативы 51b и 51c целевого положения парковки, отличные от целевого положения 51a парковки, представляется пользователю, так что пользователь может подтверждать пригодность или непригодность целевого положения 51a парковки с использованием альтернатив 51b и 51c целевого положения парковки в качестве опорной информации.
[0042] Второй модифицированный пример первого варианта осуществления настоящего изобретения
Второй модифицированный пример первого варианта осуществления настоящего изобретения проиллюстрирован со случаем выполнения автономной парковки со ссылкой на окружающую обстановку в целевом положении парковки, сохраненную в качестве распознанных результатов в устройстве 5 хранения данных. При начале автономной парковки, блок 12 управления представлением инструктирует устройство 6 представления представлять карту окружения, которая показывает окружающую обстановку в целевом положении парковки, сохраненную в устройстве 5 хранения данных, как проиллюстрировано на фиг. 7. Карта окружения включает в себя парковочные рамки 61, 62 и 63 и указывает целевое положение 62a парковки, частично перекрывающее парковочную рамку 62. Другие транспортные средства 22 и 23 паркуются в парковочных рамках 61 и 63, соответственно, в то время как транспортное средство 23 немного смещено от парковочной рамки 63 к целевому положению 62a парковки. В силу этого трудно припарковать транспортное средство-носитель 21 в целевом положении 62a парковки.
[0043] Блок 12 управления представлением представляет заменяющее положение 62b парковки, смещенное от целевого положения 62a парковки, которое представляет собой пространство без помех для легкой парковки транспортного средства-носителя 21. Пользователь вводит информацию либо целевого положения 62a парковки, либо заменяющего положения 62b парковки через устройство 4 ввода. Блок 14 помощи при парковке выводит управляющий сигнал парковки транспортного средства-носителя либо в целевом положении 62a парковки, либо в заменяющем положении 62b парковки, выбранном пользователем, в различные типы исполнительных механизмов.
[0044] Согласно второму модифицированному примеру первого варианта осуществления настоящего изобретения, заменяющее положение 62b парковки представляется в положении, смежном, но отличном от целевого положения 62a парковки, для запроса у пользователя выбора целевого положения 62a парковки или заменяющего положения 62b парковки, чтобы осуществить парковку. Целевое положение 62a парковки в силу этого может смещаться в зависимости от обстановки при парковке. Например, когда помеха, такая как велосипед, присутствует в целевом положении парковки на придомовой стоянке, целевое положение парковки смещается при объезде помехи для выполнения автономной парковки.
[0045] Второй вариант осуществления
Конфигурация устройства помощи при парковке
Второй вариант осуществления настоящего изобретения проиллюстрирован со случаем, в котором парковка в целевом положении парковки повторяется несколько раз, с тем чтобы обнаруживать (распознавать) окружающую обстановку в целевом положении парковки несколько раз. Результаты обнаружения, обнаруженные во время многократной парковки, интегрируются таким образом, чтобы дополнять помехи и характеристические точки, которые не могут обнаруживаться посредством однократной парковки. Точность картографических данных, сформированных согласно окружающей обстановки в целевом положении парковки, может повышаться.
[0046] Конфигурация устройства помощи при парковке согласно второму варианту осуществления настоящего изобретения идентична конфигурации устройства помощи при парковке согласно первому варианту осуществления настоящего изобретения, включающего в себя устройство 1 управления (контроллер), датчик 2 окружающей обстановки, датчик 3 состояния транспортного средства, устройство (интерфейс) 4 ввода, устройство 5 хранения данных и устройство 6 представления, как проиллюстрировано на фиг. 1.
[0047] Датчик 2 окружающей обстановки обнаруживает окружающую обстановку в целевом положении парковки, включающую в себя помехи и характеристические точки, присутствующие около целевого положения парковки для каждой парковки. Датчик 3 состояния транспортного средства обнаруживает информацию одометрии, включающую в себя импульс скорости вращения колес и угловую скорость относительно вертикальной оси для каждой парковки.
[0048] Блок 11 формирования карт формирует карту окружения на основе окружающей обстановки, обнаруженной посредством датчика 2 окружающей обстановки, и информации одометрии, включающей в себя импульс скорости вращения колес и угловую скорость относительно вертикальной оси, определенные посредством датчика 3 состояния транспортного средства для каждой парковки, и сохраняет сформированную карту окружения в устройстве 5 хранения данных. Блок 11 формирования карт задает начальное положение P1 парковки на карте M11 окружения в соответствии с информацией начального положения P1 парковки, вводимой через устройство 4 ввода, и сохраняет заданное начальное положение P1 парковки в устройстве 5 хранения данных. Блок 11 формирования карт также задает целевое положение P2 парковки на карте M11 окружения в соответствии с информацией целевого положения P2 парковки, вводимой через устройство 4 ввода, и сохраняет заданное целевое положение P2 парковки в устройстве 5 хранения данных.
[0049] Блок 11 формирования карт формирует данные карты окружения, полученной посредством интегрирования множества карт окружения, сформированных во время многократной парковки (также называемой далее «интегрированной картой»). Способ интегрирования множества карт окружения может использовать метод наименьших квадратов таким образом, чтобы минимизировать ошибку между соответствующими характеристическими точками. В качестве альтернативы, итеративный алгоритм ближайших точек (ICP) может использоваться, когда окружающая обстановка получена в качестве информации точечных групп с помощью лазерного дальномера (LRF), используемого в качестве датчика 2 окружающей обстановки.
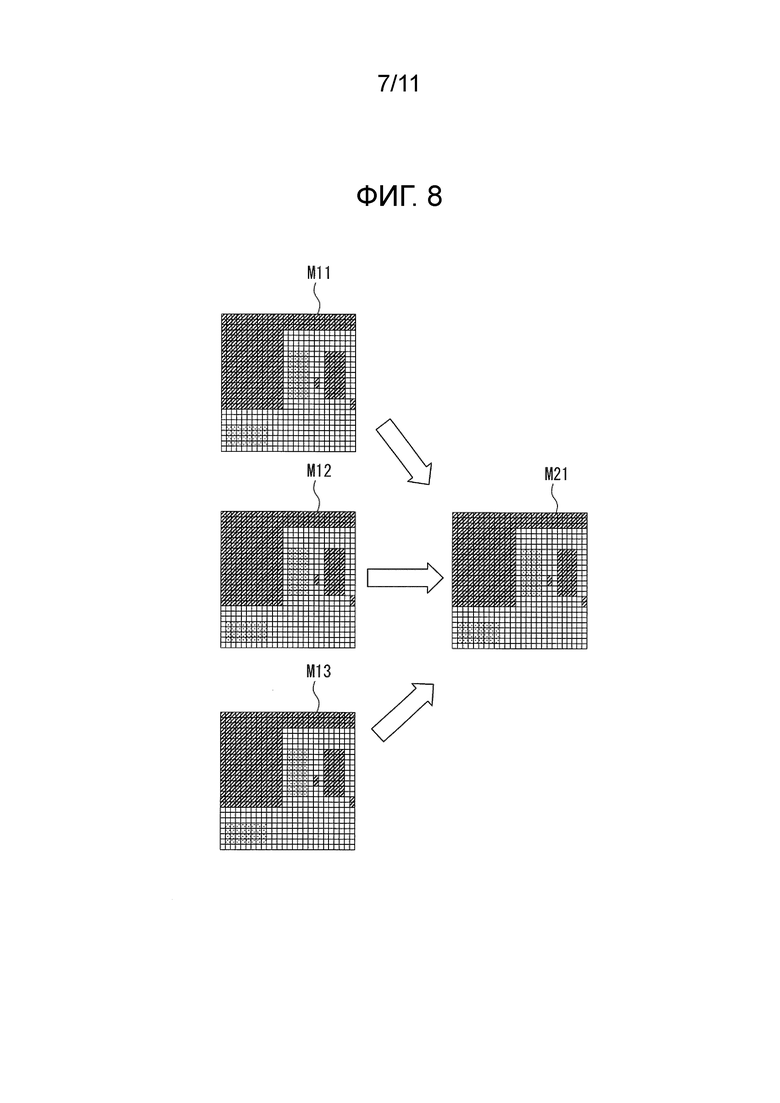
[0050] Блок 11 формирования карт может интегрировать множество карт окружения, полученных во время многократной парковки, совместно после того, как все операции парковки завершаются, с тем чтобы формировать интегрированную карту. Например, как проиллюстрировано на фиг. 8, блок 11 формирования карт может интегрировать карту M11 окружения, полученную при первой парковке, карту M12 окружения, полученную при второй парковке, и карту M13 окружения, полученную при третьей парковке, после того как третья парковка завершается, с тем чтобы формировать интегрированную карту M21. Хотя фиг. 8 иллюстрирует случай, в котором карты M11, M12 и M13 окружения и интегрированная карта M21 являются одинаковыми, соответствующие данные карт M11, M12 и M13 окружения и интегрированной карты M21 могут отличаться друг от друга (то же применимо как к фиг. 9, так и к фиг. 10).
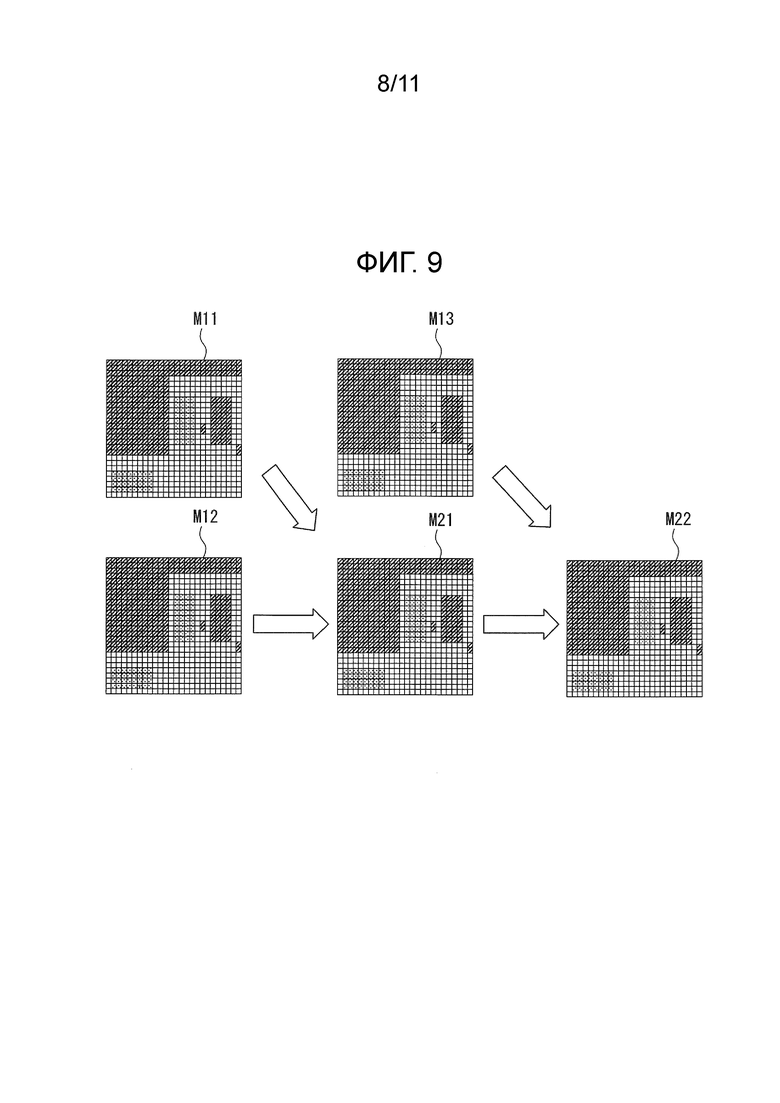
[0051] В качестве альтернативы, блок 11 формирования карт может формировать (обновлять) интегрированную карту для каждой парковки после второй парковки. Например, как проиллюстрировано на фиг. 9, блок 11 формирования карт может интегрировать карту M11 окружения, полученную при первой парковке, и карту M12 окружения, полученную при второй парковке, после того, как вторая парковка завершается, с тем чтобы формировать первую интегрированную карту M21. Блок 11 формирования карт затем может интегрировать карту M13 окружения, полученную при третьей парковке, и первую интегрированную карту M21 после того, как третья парковка завершается, с тем чтобы формировать вторую интегрированную карту M22.
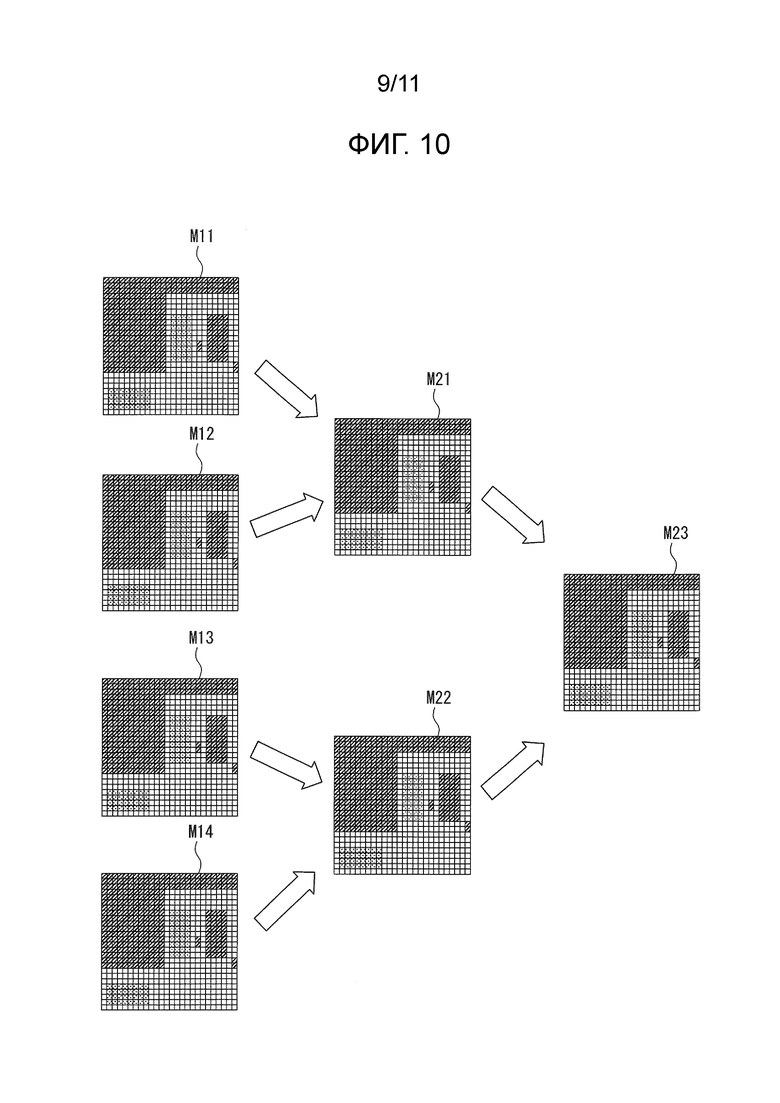
[0052] В качестве альтернативы, блок 11 формирования карт может сортировать множество карт окружения в несколько групп и интегрировать карты окружения в расчете на группу, с тем чтобы формировать интегрированные карты для соответствующих групп. Например, как проиллюстрировано на фиг. 10, блок 11 формирования карт интегрирует карту M11 окружения, полученную при первой парковке, и карту M12 окружения, полученную при второй парковке, в качестве первой группы, с тем чтобы формировать первую интегрированную карту M21. Блок 11 формирования карт затем интегрирует карту M13 окружения, полученную при третьей парковке, и карту M14 окружения, полученную в четвертой парковке, в качестве второй группы, с тем чтобы формировать вторую интегрированную карту M22. Блок 11 формирования карт дополнительно интегрирует первую интегрированную карту M21 и вторую интегрированную карту M22, с тем чтобы формировать третью интегрированную карту M23.
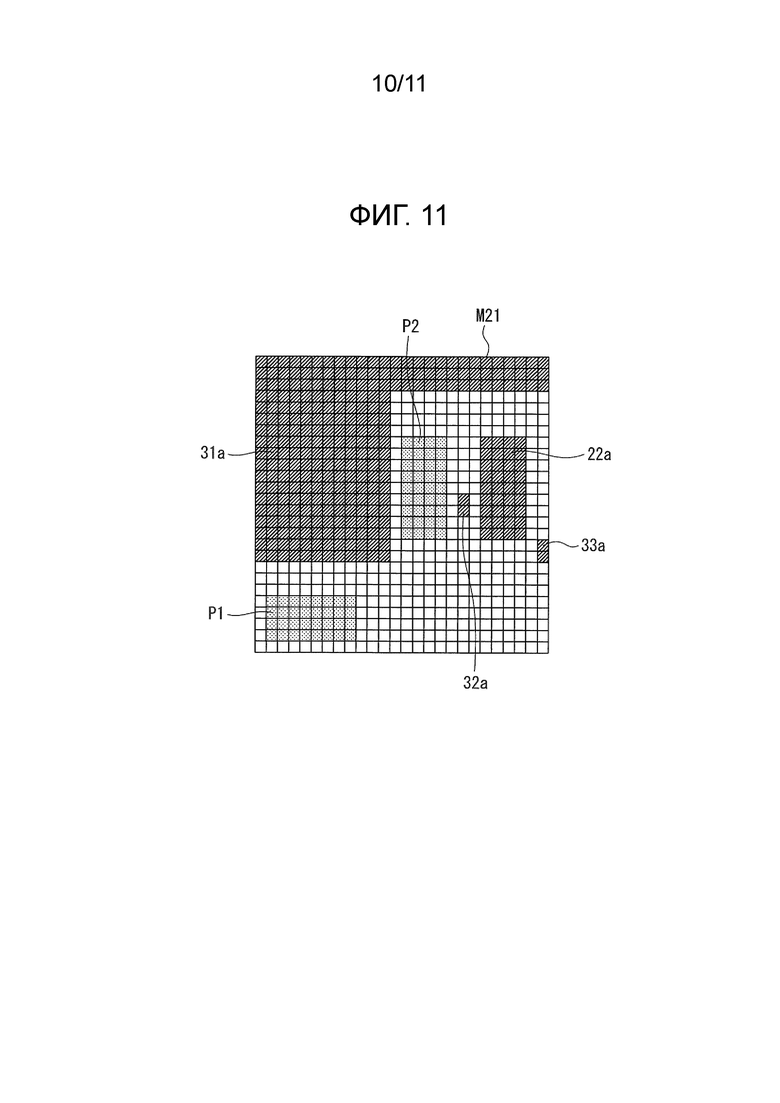
[0053] Фиг. 11 иллюстрирует интегрированную карту M21, сформированную посредством блока 11 формирования карт. Интегрированная карта M21 включает в себя помехи 31a, 32a и 33a около целевого положения P2 парковки. Начальное положение P1 парковки и целевое положение P2 парковки задаются на интегрированной карте M21. Интегрированная карта M21, проиллюстрированная на фиг. 11, является идентичной карте окружения, проиллюстрированной на фиг. 3, но могут быть получены более точные картографические данные посредством дополнения нескольких распознанных результатов.
[0054] Блок 12 управления представлением инструктирует устройство 6 представления представлять интегрированную карту, включающую в себя начальное положение парковки и целевое положение парковки, сохраненные в устройстве 5 хранения данных, и запрашивает у пользователя ввод в отношении пригодности или непригодности интегрированной карты, включающей в себя начальное положение парковки и целевое положение парковки. Например, блок 12 управления представлением инструктирует устройство 6 представления представлять интегрированную карту M21, включающую в себя начальное положение P1 парковки и целевое положение P2 парковки, как проиллюстрировано на фиг. 11, и запрашивает у пользователя ввод в отношении пригодности или непригодности интегрированной карты M21, включающей в себя начальное положение P1 парковки и целевое положение P2 парковки.
[0055] Когда множество карт M11, M12 и M13 окружения интегрируются вместе после завершения многократной парковки для формирования интегрированной карты M21, как проиллюстрировано на фиг. 8, блок 12 управления представлением представляет интегрированную карту M21 для запроса у пользователя ввода в отношении пригодности или непригодности интегрированной карты M21. Когда первая интегрированная карта M21 и вторая интегрированная карта M22 формируются для каждой парковки после второй парковки, как проиллюстрировано на фиг. 9, блок 12 управления представлением может представлять первую интегрированную карту M21 и вторую интегрированную карту M22 для каждой парковки после второй парковки для запроса у пользователя ввода в отношении пригодности или непригодности интегрированной карты M21 и второй интегрированной карты M22 каждый раз, когда формируются соответствующие интегрированные карты. В качестве альтернативы, блок 12 управления представлением может представлять только вторую интегрированную карту M22, сформированную в завершение без представления первой интегрированной карты M21, для запроса у пользователя ввода в отношении пригодности или непригодности только второй интегрированной карты M22.
[0056] Когда первая интегрированная карта M21 и вторая интегрированная карта M22 формируются в расчете на группу, и первая интегрированная карта M21 и вторая интегрированная карта M22 после этого интегрируются вместе, чтобы формировать третью интегрированную карту M23, как проиллюстрировано на фиг. 10, блок 12 управления представлением может представлять первую интегрированную карту M21, вторую интегрированную карту M22 и третью интегрированную карту M23 каждый раз, когда формируются соответствующие интегрированные карты, для запроса у пользователя ввода в отношении пригодности или непригодности каждой из первой интегрированной карты M21, второй интегрированной карты M22 и третьей интегрированной карты M23. В качестве альтернативы, блок 12 управления представлением может представлять только третью интегрированную карту M23, сформированную в завершение без представления первой интегрированной карты M21 или второй интегрированной карты M22, для запроса у пользователя ввода в отношении пригодности или непригодности только третьей интегрированной карты M23.
[0057] Устройство 4 ввода принимает ввод определения того, является ли окружающая обстановка в целевом положении парковки подходящей, от пользователя, когда окружающая обстановка в целевом положении парковки представляется в устройстве 6 представления. Например, когда интегрированная карта M21, проиллюстрированная на фиг. 11, представляется в устройстве 6 представления, и когда пользователь определяет, что по меньшей мере одно из непосредственно представленной интегрированной карты M21 (а именно, присутствия или отсутствия либо положений помех 31a, 32a и 33a и другого транспортного средства 22a на интегрированной карте M21), начального положения P1 парковки на интегрированной карте M21 и целевого положения P2 парковки на интегрированной карте M21 не является подходящим, пользователь вводит определение непригодности через устройство 4 ввода. Когда пользователь определяет, что непосредственно представленная интегрированная карта M21, начальное положение P1 парковки на интегрированной карте M21 и целевое положение P2 парковки на интегрированной карте M21 являются подходящими, пользователь вводит определение пригодности через устройство 4 ввода.
[0058] Блок 13 определения определяет пригодность или непригодность интегрированной карты M21, в соответствии с определением пригодности или непригодности, введенным пользователем через устройство 4 ввода. Когда определение пригодности вводится пользователем, блок 13 определения определяет то, что интегрированная карта M21 является подходящей, чтобы использовать и сохранять интегрированную карту M21 в устройстве 5 хранения данных в качестве данных для рассмотрения во время автономной парковки. Когда определение непригодности вводится пользователем, блок 13 определения определяет то, что интегрированная карта M21 не является подходящей, и не использует или сохраняет интегрированную карту M21 в устройстве 5 хранения данных в качестве данных для рассмотрения во время автономной парковки.
[0059] Блок 14 помощи при парковке считывает данные окружающей обстановки в целевом положении парковки, сохраненной в устройстве 5 хранения данных во время последующей или более поздней парковки в целевом положении парковки, и выполняет автономную парковку с использованием данных окружающей обстановки в целевом положении парковки.
[0060] Блок 12 управления представлением может инструктировать устройство 6 представления представлять карту окружения, сформированную посредством блока 11 формирования карт для каждой парковки, для запроса у пользователя ввода определения пригодности или непригодности каждой карты окружения. Устройство 4 ввода может принимать ввод пригодности или непригодности карты окружения от пользователя для каждой парковки, когда карта окружения представляется в устройстве 6 представления. Блок 13 определения может определять пригодность или непригодность карты окружения для каждой парковки в соответствии с определением пригодности или непригодности, введенным пользователем через устройство 4 ввода. Когда пользователь вводит определение пригодности, блок 13 определения определяет, что карта окружения является подходящей, чтобы сохранить карту окружения в устройстве 5 хранения данных. Когда пользователь вводит определение непригодности, блок 13 определения определяет, что карта окружения не является подходящей, и не сохраняет карту окружения в устройстве 5 хранения данных.
[0061] Способ помощи при парковке
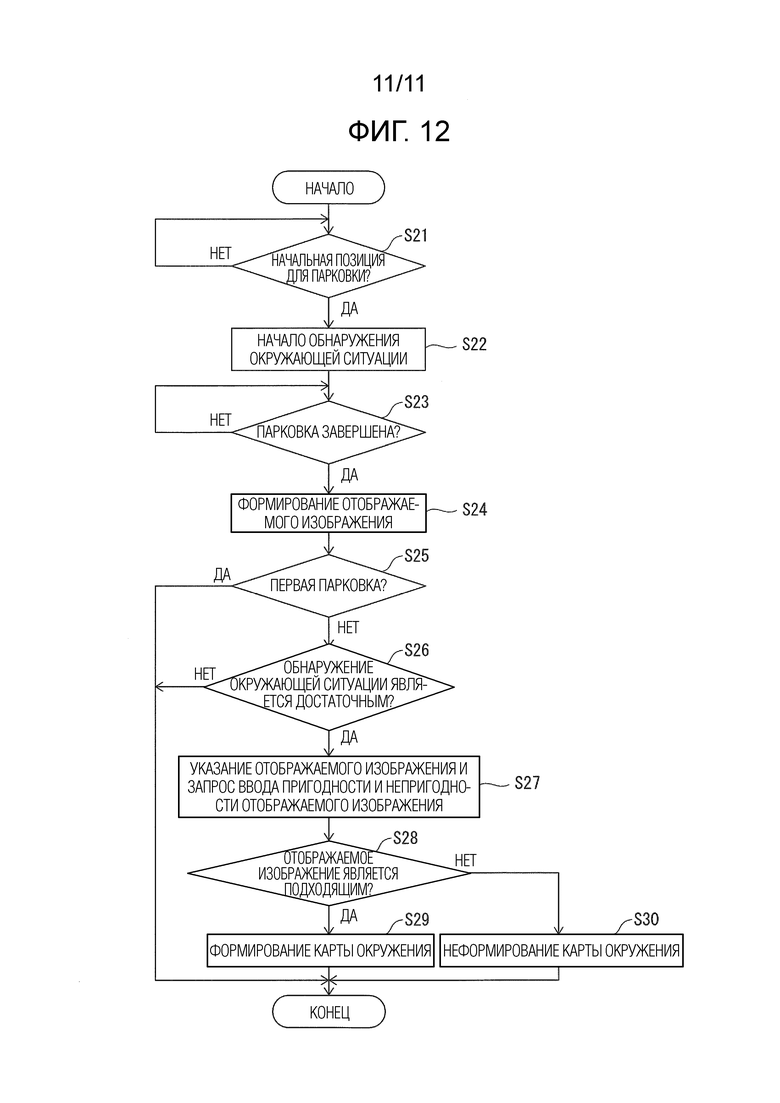
Ниже проиллюстрирован способ помощи при парковке согласно второму варианту осуществления настоящего изобретения со ссылкой на блок-схему на фиг. 12.
[0062] На этапе S21, блок 11 формирования карт определяет, достигло ли транспортное средство-носитель начального положения парковки, в соответствии с информацией с инструкциями, введенной пользователем через устройство 4 ввода, и процесс переходит к этапу S22, когда определено, что транспортное средство-носитель достигло начального положения парковки.
[0063] На этапе S22, пользователь начинает парковку вручную в целевом положении парковки из начального положения парковки. Операция парковки может управляться посредством использования традиционного устройства помощи при парковке с использованием изображений вида «с высоты птичьего полета». Датчик 2 окружающей обстановки обнаруживает помехи и характеристические точки около целевого положения парковки. Датчик 3 состояния транспортного средства обнаруживает информацию одометрии, включающую в себя импульс скорости вращения колес и угловую скорость относительно вертикальной оси.
[0064] На этапе S23, блок 11 формирования карт определяет, достигло ли транспортное средство-носитель целевого положения парковки, и завершает парковку в соответствии с операцией переключения передач или операцией нажатия парковочного тормоза, выполненной пользователем. Когда определено, что транспортное средство-носитель завершает парковку, процесс переходит к этапу S24.
[0065] На этапе S24, блок 11 формирования карт формирует карту окружения (отображаемое изображение), включающую в себя начальное положение парковки и целевое положение парковки, на основании окружающей обстановки, обнаруженной посредством датчика 2 окружающей обстановки, и информации одометрии, обнаруженной посредством датчика 3 состояния транспортного средства.
[0066] На этапе 25, блок 11 формирования карт определяет, представляет ли собой парковка, выполняемая на этапах S21-S23, первую парковку в том же целевом положении парковки. Когда парковка определяется в качестве первой парковки, процесс завершается, поскольку блок 11 формирования карт не может формировать интегрированную карту, поскольку имеется только одна карта окружения, сформированная в это время. Когда парковка определяется в качестве не первой парковки на этапе S25, процесс переходит к этапу S26.
[0067] На этапе S26, блок 11 формирования карт определяет, является ли обнаружение (распознавание) в отношении окружающей обстановки в целевом положении парковки достаточным. Например, блок 11 формирования карт определяет то, что обнаружение окружающей обстановки является достаточным, когда номер парковки (номер распознавания) в том же целевом положении парковки является пороговым значением, которое равно трем или более, и определяет то, что обнаружение окружающей обстановки не является достаточным, когда номер парковки меньше трех. В качестве альтернативы, блок 11 формирования карт может определять то, что обнаружение окружающей обстановки является достаточным, когда вероятность присутствия помех в окружающей обстановки в целевом положении парковки составляет пороговое значение или больше, и определять то, что обнаружение окружающей обстановки не является достаточным, когда вероятность присутствия помех меньше порогового значения. Процесс может переходить к этапу S27 без выполнения определения, является ли обнаружение окружающей обстановки достаточным, на этапе S26.
[0068] На этапе S27, блок 12 управления представлением представляет на устройстве 6 представления карту окружения (отображаемое изображение), включающую в себя начальное положение парковки и целевое положение парковки, сформированную посредством блока 11 формирования карт, и запрашивает у пользователя ввод в отношении пригодности или непригодности отображаемого изображения. Пользователь визуально проверяет отображаемое изображение, представленное в устройстве 6 представления, и вводит пригодность или непригодность отображаемого изображения через устройство 4 ввода. Когда пользователь определяет, что присутствие или отсутствие или положения помех, начальное положение парковки или целевое положение парковки в отображаемом изображении не являются корректными, пользователь вводит определение того, что отображаемое изображение не является подходящим, через устройство 4 ввода. Когда пользователь определяет, что присутствие или отсутствие или положения помех, начальное положение парковки и целевое положение парковки в отображаемом изображении являются корректными, пользователь вводит определение того, что отображаемое изображение является подходящим, через устройство 4 ввода.
[0069] На этапе S28, блок 13 определения определяет пригодность или непригодность карты окружения, сформированной посредством блока 11 формирования карт, в соответствии с определением пригодности или непригодности отображаемого изображения, вводимой пользователем через устройство 4 ввода. Когда определение пригодности вводится пользователем, блок 13 определения определяет, что карта окружения, сформированная посредством блока 11 формирования карт, является подходящей, и процесс переходит к этапу S29.
[0070] На этапе S29, блок 11 формирования карт формирует карту окружения (интегрированную карту), полученную посредством интегрирования множества карт окружения, включающих в себя карту окружения, сформированную посредством блока 11 формирования карт во время текущей парковки, посредством использования метода наименьших квадратов или ICP-алгоритма. Например, когда текущая парковка представляет собой третью парковку, карта окружения, полученная при первой парковке, и карта окружения, полученная при второй парковке, сохраненные в устройстве 5 хранения данных, интегрируются с картой окружения, полученной во время текущей (третьей) парковки, с тем чтобы формировать интегрированную карту. В качестве альтернативы, когда карта окружения, полученная при первой парковке, и карта окружения, полученная при второй парковке, интегрируются вместе и сохраняются в устройстве 5 хранения данных в качестве первой интегрированной карты, первая интегрированная карта и карта окружения, полученная во время текущей (третьей) парковки, интегрируются вместе, с тем чтобы формировать вторую интегрированную карту. Интегрированная карта, сформированная посредством блока 11 формирования карт, используется в качестве картографических данных для рассмотрения во время автономной парковки и сохраняется в устройстве 5 хранения данных.
[0071] Когда определение непригодности вводится пользователем на этапе S28, блок 13 определения определяет то, что отображаемое изображение, сформированное посредством блока 11 формирования карт, не является подходящим, и процесс переходит к этапу S30. На этапе S30, блок 13 определения не использует карту окружения, сформированную посредством блока 11 формирования карт, или формирует интегрированную карту, полученную посредством интегрирования карт окружения.
[0072] Программа помощи при парковке согласно второму варианту осуществления настоящего изобретения выполняется посредством компьютера, составляющего устройство 1 управления посредством процесса способа помощи при парковке, проиллюстрированного на фиг. 12. Программа помощи при парковке согласно второму варианту осуществления настоящего изобретения, например, может сохраняться в устройстве 5 хранения данных.
[0073] Способ помощи при парковке проиллюстрирован на фиг. 12 со случаем, в котором блок 12 управления представлением представляет карту окружения (отображаемое изображение), сформированную посредством блока 11 формирования карт, на устройстве 6 представления на этапе S27, но не ограничен этой иллюстрацией. Например, блок 11 формирования карт может формировать интегрированную карту (отображаемое изображение), полученную посредством интегрирования множества карт окружения перед этапом S27 таким образом, что блок 12 управления представлением представляет интегрированную карту (отображаемое изображение) на устройстве 6 представления на этапе S27. Когда определение того, что интегрированная карта (отображаемое изображение) является подходящей, вводится пользователем на этапе S28, процесс переходит к этапу S29, и блок 13 определения использует и сохраняет интегрированную карту в устройстве 5 хранения данных в качестве картографических данных для рассмотрения во время автономной парковки. Когда определение того, что интегрированная карта (отображаемое изображение) не является подходящей, вводится пользователем на этапе S28, блок 13 определения определяет, что интегрированная карта не является подходящей, и процесс переходит к этапу S30. На этапе S30, блок 13 определения не использует или сохраняет интегрированную карту в устройстве 5 хранения данных в качестве картографических данных для рассмотрения во время автономной парковки.
[0074] Согласно второму варианту осуществления настоящего изобретения, карта окружения, которая показывает окружающую обстановку в целевом положении парковки, обнаруженную посредством датчика 2 окружающей обстановки, представляется в устройстве 6 представления при сохранении окружающей обстановки в целевом положении парковки и выполнении автономной парковки с использованием сохраненной окружающей обстановки в целевом положении парковки. Окружающая обстановка в целевом положении парковки сохраняется, когда пользователь определяет, что представленная окружающая обстановка в целевом положении парковки является подходящей. Окружающая обстановка в целевом положении парковки, подходящая для рассмотрения во время автономной парковки, в силу этого может сохраняться. Соответственно, автономная парковка может выполняться с высокой точностью посредством использования сохраненной окружающей обстановки в целевом положении парковки.
[0075] Парковка в целевом положении парковки повторяется, чтобы обнаруживать окружающую обстановку в целевом положении парковки несколько раз, и окружающая обстановка в целевом положении парковки, обнаруживаемая несколько раз, сохраняется, чтобы интегрировать и дополнить всю окружающую обстановку в целевом положении парковки для формирования карты окружения с большей точностью.
[0076] Поскольку окружающая обстановка в целевом положении парковки, сохраненная во время многократной парковки, представляется пользователю, пользователь может выбирать подходящие данные из окружающей обстановки в целевом положении парковки, сохраненной во время многократной парковки.
[0077] Поскольку окружающая обстановка в целевом положении парковки сохраняется для каждой парковки в целевом положении парковки, окружающая обстановка, такая как карта окружения, подходящая для рассмотрения во время автономной парковки, может выбираться для каждой парковки в целевом положении парковки.
[0078] Окружающая обстановка, включающая в себя целевое положение парковки, представляется пользователю, когда карта окружения, показывающая окружающую обстановку в целевом положении парковки, обнаруженную посредством датчика 2 окружающей обстановки, представляется в устройстве 6 представления. Пользователь в силу этого может легко распознавать взаимное расположение целевого положения парковки и помех, присутствующих около целевого положения парковки, при вводе пригодности или непригодности представленной окружающей обстановки.
[0079] Для окружающей обстановки при каждой парковке в целевом положении парковки представляется определение того, является ли окружающая обстановка в целевом положении парковки, обнаруженная посредством датчика 2 окружающей обстановки, подходящей, принимается ввод от пользователя для каждой парковки в целевом положении парковки, и окружающая обстановка, определенная пользователем как подходящая, сохраняется. Окружающая обстановка в целевом положении парковки, подходящем для рассмотрения во время автономной парковки, выбранная из окружающей обстановки, полученной для каждой парковки в целевом положении парковки, в силу этого может сохраняться. Соответственно, автономная парковка может выполняться с высокой точностью с использованием сохраненной окружающей обстановки в целевом положении парковки.
[0080] Модифицированный пример второго варианта осуществления настоящего изобретения
Второй вариант осуществления настоящего изобретения проиллюстрирован со случаем, в котором множество карт окружения, полученных во время многократной парковки, интегрируются вместе. Модифицированный пример второго варианта осуществления настоящего изобретения проиллюстрирован со случаем, в котором некоторые карты окружения избирательно интегрируются вместе.
[0081] Блок 12 управления представлением представляет множество карт окружения, полученных во время многократной парковки, на устройстве 6 представления одновременно рядом или последовательно и запрашивает у пользователя выбор карт окружения (распознанных результатов), которые должны интегрироваться из представленных карт окружения. Пользователь визуально проверяет карты окружения, представленные в устройстве 6 представления, чтобы ввести информацию с инструкциями в отношении карт окружения (распознанных результатов), подходящих для интегрирования, выбранных из представленных карт окружения, через устройство 4 ввода. Блок 11 формирования карт извлекает карты окружения, которые должны интегрироваться, из сохраненных карт окружения в соответствии с результатами карт окружения, которые должны интегрироваться, выбранных пользователем. Блок 11 формирования карт интегрирует выбранные карты окружения, чтобы формировать интегрированную карту.
[0082] Согласно модифицированному примеру второго варианта осуществления настоящего изобретения, множество карт окружения, полученных посредством повторения парковки несколько раз, представляются в устройстве 6 представления для запроса у пользователя выбора карт окружения (распознанных результатов), которые должны интегрироваться, из представленных карт окружения. Соответственно, пользователь может выбирать карты окружения, подходящие для интегрирования, из карт окружения, полученных во время соответствующего распознавания, с тем чтобы избирательно интегрировать подходящие карты окружения при исключении неподходящих карт окружения.
[0083] Другие варианты осуществления
Хотя настоящее изобретение описано выше со ссылкой на первый и второй варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию.
[0084] Хотя первой и второй варианты осуществления примерно иллюстрируют случай, в котором устройство 6 представления главным образом представляет собой дисплей, устройство 6 представления может представлять собой устройство, отличное от дисплея. Например, когда устройство 6 представления представляет собой динамик, устройство 6 представления может выводить голос для пояснения окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки, к примеру «Коэффициент распознавания окружающей обстановки целевого положения парковки теперь составляет 80%», или «Целевое положение парковки распознано впереди», для представления пользователю информации относительно окружающей обстановки в целевом положении парковки, обнаруженной посредством датчика 2 окружающей обстановки.
[0085] Следует понимать, что настоящее изобретение включает в себя различные варианты осуществления, не раскрытые в данном документе. Следовательно, объем настоящего изобретения определяется только уточняющими материалами согласно формуле изобретения, обоснованно извлекаемыми из вышеприведенного описания.
Список условных обозначений
[0086] 1 - устройство управления
2 - датчик окружающего состояния
2a - камера
2b - лидар
3 - датчик состояния транспортного средства
3a - датчик скорости вращения колес
3b - датчик угловой скорости относительно вертикальной оси
4 - устройство ввода
5 - устройство хранения данных
6 - индикаторное устройство
11 - блок формирования карт
12 - блок управления индикаторами
13 - блок определения
14 - блок помощи при парковке
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2703478C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2020 |
|
RU2791347C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2691457C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |

Изобретение относится к способу и устройству помощи при парковке. Способ помощи при парковке в целевом положении парковки и выполнении автономной парковки с использованием сохраненной окружающей обстановки содержит этап, на котором обнаруживают окружающую обстановку; этап, на котором указывают обнаруженную окружающую обстановку; этап, на котором принимают определение того, является ли указываемая окружающая обстановка подходящей, вводимое пользователем; этап, на котором сохраняют окружающую обстановку, когда определение пригодности вводится пользователем, и этап, на котором выполняют автоматическую парковку. Автоматическую парковку выполняют с использованием окружающей обстановки, сохраненной ранее, при прибытии в упомянутую окружающую обстановку после распознавания окружающей обстановки. Достигается повышение безопасности автоматической парковки транспортного средства. 2 н. и 6 з.п. ф-лы, 14 ил.
1. Способ помощи при парковке для сохранения окружающей обстановки в целевом положении парковки при парковке в целевом положении парковки и выполнении автономной парковки с использованием сохраненной окружающей обстановки, при этом способ содержит:
- этап, на котором обнаруживают окружающую обстановку;
- этап, на котором указывают обнаруженную окружающую обстановку;
- этап, на котором принимают определение того, является ли указываемая окружающая обстановка подходящей, вводимое пользователем;
- этап, на котором сохраняют окружающую обстановку, когда определение пригодности вводится пользователем; и
- этап, на котором выполняют автоматическую парковку с использованием окружающей обстановки, сохраненной ранее, при прибытии в упомянутую окружающую обстановку после распознавания окружающей обстановки.
2. Способ помощи при парковке по п. 1, в котором:
- на этапе обнаружения окружающей обстановки многократно обнаруживают окружающую обстановку во время многократной парковки в целевом положении парковки; и
- на этапе сохранения окружающей обстановки сохраняют окружающую обстановку, обнаруженную во время многократной парковки.
3. Способ помощи при парковке по п. 2, в котором на этапе указания окружающей обстановки указывают сохраненную окружающую обстановку, обнаруженную во время многократной парковки.
4. Способ помощи при парковке по п. 2 или 3, в котором на этапе сохранения окружающей обстановки сохраняют окружающую обстановку для каждой парковки в целевом положении парковки.
5. Способ помощи при парковке по любому из пп. 1-3, в котором на этапе указания окружающей обстановки указывают окружающую обстановку, включающую в себя целевое положение парковки.
6. Способ помощи при парковке по любому из пп. 1-3, в котором на этапе указания окружающей обстановки указывают окружающую обстановку, включающую в себя альтернативу целевого положения парковки в положении, отличном от целевого положения парковки.
7. Способ помощи при парковке по п. 2 или 3, в котором:
- на этапе указания окружающей обстановки указывают окружающую обстановку для каждой парковки в целевом положении парковки;
- на этапе приема ввода определения пользователем принимают определение того, является ли окружающая обстановка подходящей, вводимое пользователем для каждой парковки в целевом положении парковки; и
- на этапе сохранения окружающей обстановки сохраняют окружающую обстановку, определенную пользователем в качестве подходящей.
8. Устройство помощи при парковке, выполненное с возможностью сохранения окружающей обстановки в целевом положении парковки при парковке в целевом положении парковки и выполнения автономной парковки с использованием сохраненной окружающей обстановки, причем устройство содержит:
- датчик окружающей обстановки, выполненный с возможностью обнаружения окружающей обстановки;
- устройство представления, выполненное с возможностью указания обнаруженной окружающей обстановки;
- интерфейс, выполненный с возможностью приема определения того, является ли указываемая окружающая обстановка подходящей, вводимого пользователем; и
- контроллер, выполненный с возможностью сохранения окружающей обстановки, когда определение пригодности вводится пользователем, и выполнения автоматической парковки с использованием окружающей обстановки, сохраненной ранее, при прибытии в упомянутую окружающую обстановку после распознавания окружающей обстановки.
| Устройство для измерения вязкости жидкостей | 1984 |
|
SU1157404A2 |
| JP 2013244852 A, 09.12.2013 | |||
| УСТРОЙСТВО ВИДИМОЙ РЕЧИ для ГЛУХИХ | 0 |
|
SU165235A1 |

