ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
Настоящее изобретение относится к области системы глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, и способу ее применения; и, в частности, к системе глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, и способу ее применения.
Описание связанного уровня техники
Проходческий комбайн, будучи наиболее важной проходческой машиной для полностью механизированной дорожной выемки в шахтах, в целом сталкивается с такими трудностями, как жесткая рабочая среда, плохая управляемость в направлении проходки и низкое качество формирования пути. Автоматическая навигация и точное позиционирование проходческого комбайна стали ключевыми факторами для интеллектуальной разработки проходческого комбайна. Многие интегрированные средства навигации, основанные на инерциальной навигации, используются для достижения точной навигации и позиционирования проходческого комбайна, и интегрированное устройство позиционирования с инерциальной навигацией, как правило, устанавливается непосредственно на корпусе машины для обнаружения положения и изменения угла наклона проходческого комбайна. Непосредственно в ходе работы, проходческий комбайн неизбежно подвергается воздействию широкополосного возбуждения от механизма перемещения, системы бурения и системы загрузки, оказывая отрицательное воздействие на результаты обнаружения положения и угла наклона интегрированного устройства позиционирования с инерциальной навигацией. Таким образом, существует срочная потребность в системе глушения вибраций с переменным демпфированием в режиме реального времени и способе для обеспечения возможности работы интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, в приемлемом диапазоне частот окружающей среды, обеспечивая точный способ автоматической навигации и позиционирования для проходческого комбайна и обеспечивая техническую поддержку для реализации интеллектуальной, полностью механизированной выемки.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача
Ввиду указанных выше технических недостатков, задача настоящего изобретения заключается в представлении системы глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, и способа ее применения, которые могут решить проблему, заключающуюся в том, что интегрированное устройство позиционирования с инерциальной навигацией, содержащееся в проходческом комбайне, из уровня техники не может точно оценивать положение и угол наклона проходческого комбайна в режиме реального времени.
Техническое решение
Для решения указанной выше технической проблемы, в настоящем изобретении используются следующее техническое решение:
В настоящем изобретении представлена система глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, и способ ее применения. Система содержит систему мониторинга и систему глушения вибраций, причем система мониторинга содержит анализатор спектра и три датчика вибрации, которые закреплены на буровой части проходческого комбайна и совпадают, соответственно, с поперечным направлением x, вертикальным направлением y и горизонтальным направлением z проходческого комбайна; а система глушения вибраций содержит микропроцессор и несколько устройств глушения вибраций с переменным демпфированием, которые равномерно распределены по периферийной кромке вращающейся платформы и используются для пеленгации интегрированного устройства позиционирования с инерциальной вибрацией.
Каждое устройство глушения вибраций с переменным демпфированием содержит каучуковый корпус, который внутри заполнен магнитным порошком и на внутренней стенке которого установлена катушка возбуждения. Верхний и нижний концы каучукового корпуса снабжены, соответственно, верхним электромонтажным портом и нижним электромонтажным портом, которые соединены, соответственно, с верхним и нижним концами катушки возбуждения. Демпфирующий стержень, проходящий вверх и вниз, размещен посередине каучукового корпуса, причем верхний конец демпфирующего стержня выступает из каучукового корпуса и неподвижно размещен с помощью верхней опоры, а верхняя торцевая поверхность верхней опоры прикреплена к нижней стороне интегрированного устройства позиционирования с инерциальной вибрацией. Три датчика вибрации электрически соединены с анализатором спектра, а анализатор спектра, а также верхний электромонтажный порт и нижний электромонтажный порт каучукового корпуса по отдельности электрически соединены с микропроцессором.
Предпочтительно, анализатор спектра и микропроцессор установлены в электрическом шкафу проходческого комбайна.
Предпочтительно, предусмотрено четыре устройства глушения вибраций с переменным демпфированием.
В настоящем изобретении также представлен способ применения описанной выше системы глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, который, в частности, включает следующие этапы, на которых:
а. запускают электронную систему управления в проходческом комбайне для подачи электропитания на датчики вибрации, устройства глушения вибраций с переменным демпфированием и интегрированное устройство позиционирования с инерциальной навигацией; и вводят собственную частоту интегрированного устройства позиционирования с инерциальной навигацией и собственные параметры устройств глушения вибраций с переменным демпфированием;
б. запускают систему бурения и механизм перемещения проходческого комбайна, перемещают проходческий комбайн к рабочей поверхности и опускают ковшовую часть и задние упоры для фиксации проходческого комбайна;
в. обнаруживают, посредством датчиков вибрации в трех направлениях, состояние вибрации буровой части проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор спектра для анализа спектра; и вычисляют, посредством анализатора спектра, основную частотную область проходческого комбайна во время холостого режима работы;
г. вводят, посредством анализатора спектра, основную частотную область проходческого комбайна во время холостого режима работы в микропроцессор; и определяют, посредством микропроцессора, то, превышает или равняется ли основная частотная область проходческого комбайна во время холостого режима работы на этапе в удвоенной собственной частоте интегрированного устройства позиционирования с инерциальной навигацией на этапе а;
д. если результат определения на этапе г является положительным, то отправляют, посредством микропроцессора, сигнал управления проходческим комбайном для выполнения предварительной операции бурения и выполняют этап ж;
е. если результат определения на этапе г является отрицательным, то вычисляют, посредством микропроцессора проходческого комбайна, соотношение λ основной частотной области проходческого комбайна во время холостого режима работы к собственной частоте интегрированного устройства позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств глушения вибраций с переменным демпфированием, причем λ задают, как превышающее или равняющееся m; и регулируют ток возбуждения устройств глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап в;
ж. обнаруживают, посредством датчиков вибрации в трех направлениях, состояние вибрации буровой части проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор спектра для анализа спектра; и вычисляют, посредством анализатора спектра, основную частотную область проходческого комбайна в состоянии бурения;
з. вводят, посредством анализатора спектра, основную частотную область проходческого комбайна в состоянии бурения в микропроцессор; и определяют, посредством микропроцессора, то, превышает или равняется ли основная частотная область проходческого комбайна в состоянии бурения на этапе ж удвоенной собственной частоте интегрированного устройства позиционирования с инерциальной навигацией на этапе а;
и. если результат определения на этапе з является положительным, то автоматически выполняют, посредством проходческого комбайна, операцию бурения и выполняют этап л;
к. если результат определения на этапе з является отрицательным, то вычисляют, посредством микропроцессора, соотношение ζ основной частотной области проходческого комбайна в состоянии бурения к собственной частоте интегрированного устройства позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств глушения вибраций с переменным демпфированием, причем ζ задают, как превышающее или равняющееся n; и регулируют ток возбуждения устройств глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап ж; и
л. обнаруживают, посредством системы мониторинга, состояние вибрации проходческого комбайна в режиме реального времени, а также выполняют точное управление и выдачу рабочего положения и угла наклона проходческого комбайна в режиме реального времени посредством системы глушения вибраций.
Предпочтительно, m и n на этапах е и к являются числовыми значениями, которые в целом больше или равны 2, и их определяют в зависимости от конкретной ситуации.
Полезный эффект
В настоящем изобретении достигаются следующие полезные эффекты:
1. Исходя из фактической рабочей процедуры проходческого комбайна, настоящее изобретение разделяет задачу глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией в процессе проходки на две подзадачи глушения вибраций, соответственно, во время холостого режима работы и операции бурения проходческого комбайна, а также разделяет приводящее возбуждение для проходческого комбайна на различные частотные диапазоны, тем самым снижая требование точной регулировки для устройств глушения вибраций с переменным демпфированием.
2. Благодаря использованию технологии мониторинга состояния вибрации и устройств глушения вибраций с переменным демпфированием, настоящее изобретение может анализировать частоты возбуждения проходческого комбайна в состоянии холостого режима работы и состоянии бурения в режиме реального времени, а также глушит вибрацию интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, в режиме реального времени в соответствии с вариацией частоты возбуждения, тем самым обеспечивая постоянную работу интегрированного устройства позиционирования с инерциальной навигацией в приемлемой среде.
3. В настоящем изобретении используются устройства глушения вибраций с переменным демпфированием для выполнения глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, а также оно изменяет жесткость соединения и демпфирование между интегрированным устройством позиционирования с инерциальной навигацией и корпусом машины путем регулировки тока возбуждения устройств глушения вибраций с переменным демпфированием, так что частота рабочей среды интегрированного устройства позиционирования с инерциальной навигацией сильно отличается от меняющейся во времени частоты возбуждения проходческого комбайна, что повышает точность и надежность интегрированного устройства позиционирования с инерциальной навигацией при оценке положения и угла наклона проходческого комбайна.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более ясного описания технических решений в вариантах реализации настоящего изобретения или в уровне техники, ниже вкратце приведены сопроводительные чертежи, необходимые для описания вариантов реализации и уровня техники. Очевидно, что на сопроводительных чертежах в нижеследующем описании представлены лишь некоторые варианты реализации настоящего изобретения, и специалист в данной области техники по-прежнему сможет построить другие чертежи, опираясь на эти сопроводительные чертежи, без творческих усилий.
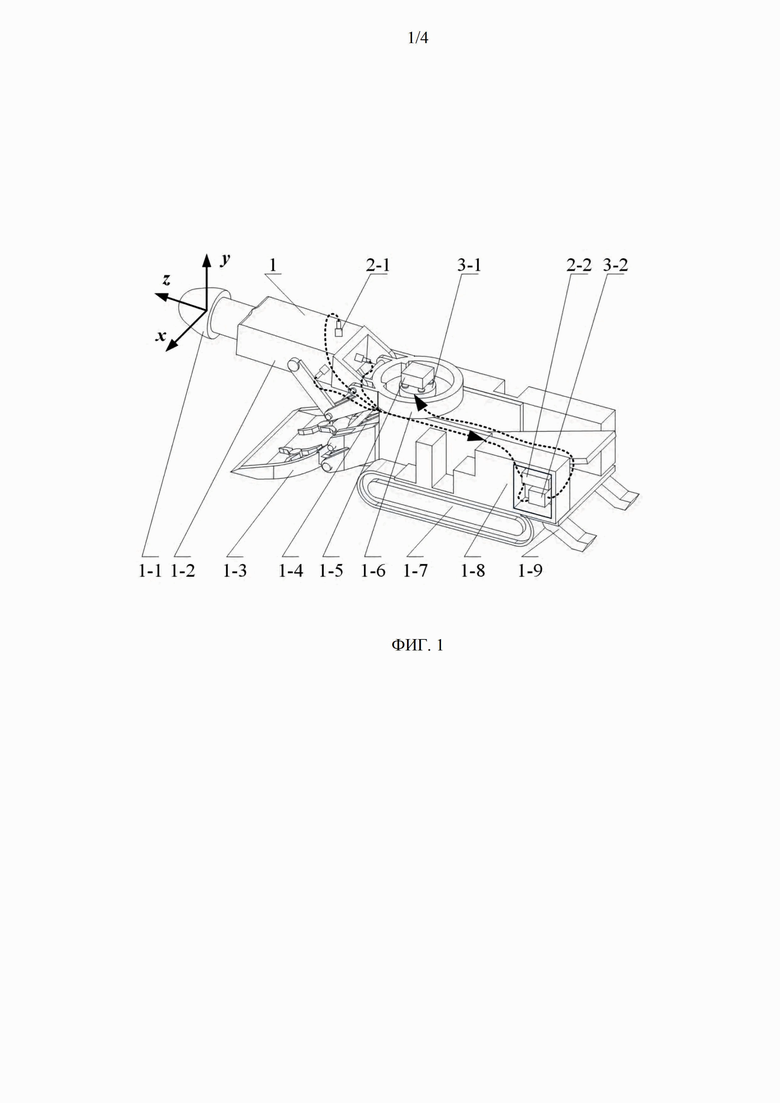
ФИГ. 1 представляет собой схематическое изображение, на котором показаны положения установки системы мониторинга и системы глушения вибраций в варианте реализации настоящего изобретения;
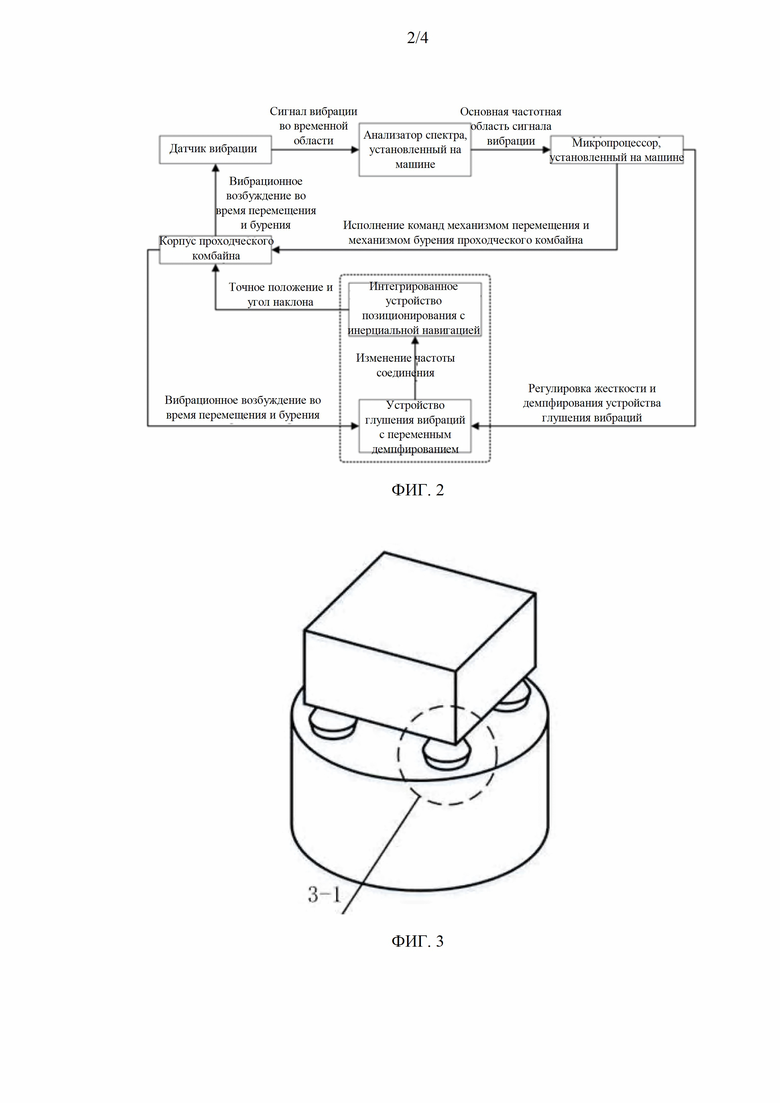
ФИГ. 2 представляет собой принципиальную схему управления ответными вибрациями в системе глушения вибраций в варианте реализации настоящего изобретения;
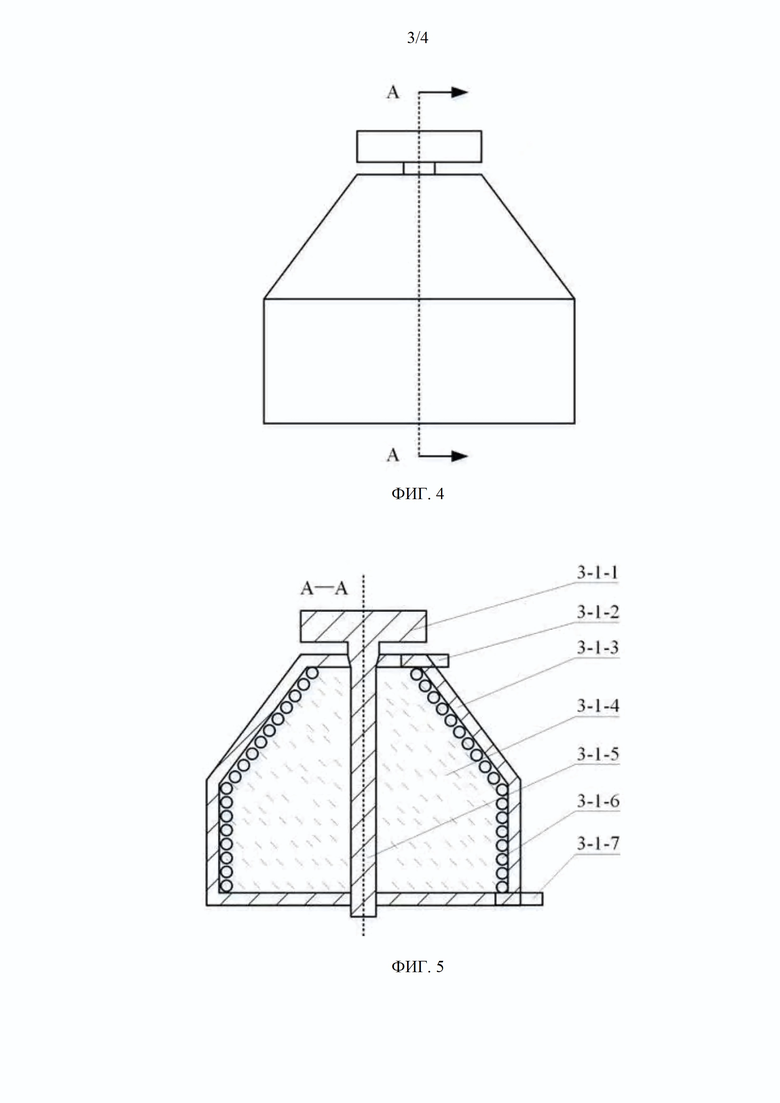
ФИГ. 3 представляет собой схематическое изображение, на котором показаны положения установки устройств глушения вибраций с переменным демпфированием в варианте реализации настоящего изобретения;
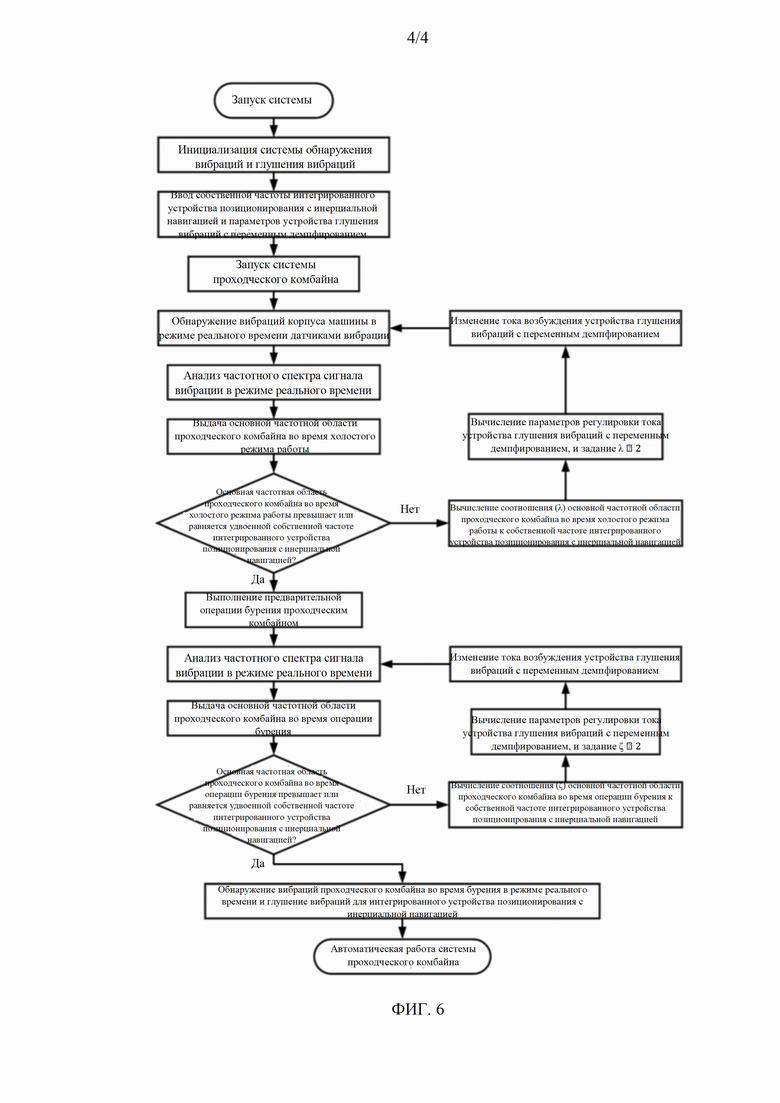
ФИГ. 4 представляет собой схематическое конструктивное изображение устройства глушения вибраций с переменным демпфированием в варианте реализации настоящего изобретения;
ФИГ. 5 представляет собой изображение в разрезе устройства глушения вибраций с переменным демпфированием в варианте реализации настоящего изобретения; и
ФИГ. 6 представляет собой рабочую схему алгоритма способа применения системы глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, в варианте реализации настоящего изобретения.
Расшифровка ссылочных обозначений: 1. Проходческий комбайн, 1-1. Буровая головка проходческого комбайна, 1-2. Буровая часть проходческого комбайна, 1-3. Ковшовая часть, 1-4. Загрузочная часть проходческого комбайна, 1-5. Интегрированное устройство позиционирования с инерциальной навигацией, 1-6. Вращающаяся платформа, 1-7. Механизм перемещения, 1-8. Электрический шкаф проходческого комбайна, 1-9. Задний упор, 2. Система мониторинга, 2-1. Датчик вибрации, 2-2. Анализатор спектра, 3. Система глушения вибраций, 3-1. Устройство глушения вибраций с переменным демпфированием, 3-1-1. Верхняя опора, 3-1-2. Верхний электромонтажный порт, 3-1-3. Каучуковый корпус, 3-1-4. Магнитный порошок, 3-1-5. Демпфирующий стержень, 3-1-6. Катушка возбуждения, 3-1-7. Нижний электромонтажный порт, 3-2. Микропроцессор
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Технические решения в вариантах реализации настоящего изобретения будут ясно и полно описаны ниже со ссылкой на сопроводительные чертежи в вариантах реализации настоящего изобретения. Безусловно, описанные варианты реализации являются лишь некоторыми, а не всеми вариантами реализации настоящей заявки. На основании вариантов реализации настоящего изобретения, все другие варианты реализации, полученные специалистом в данной области техники без изобретательской деятельности, входят в объем защиты настоящего изобретения.
Как показано на ФИГ. 1, система глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, содержит систему 2 мониторинга и систему 3 глушения вибраций, причем система 2 мониторинга содержит анализатор 2-2 спектра и три датчика 2-1 вибрации, которые закреплены на буровой части 1-2 проходческого комбайна и совпадают, соответственно, с поперечным направлением x, вертикальным направлением y и горизонтальным направлением z проходческого комбайна. Датчики 2-1 вибрации используются для мониторинга и анализа параметров спектра вибрации корпуса проходческого комбайна 1. Система 3 глушения вибраций содержит микропроцессор 3-2 и четыре устройства 3-1 глушения вибраций с переменным демпфированием, которые равномерно распределены по периферийной кромке вращающейся платформы 1-6 и используются для пеленгации интегрированного устройства 1-5 позиционирования с инерциальной вибрацией. Устройства 3-1 глушения вибраций с переменным демпфированием используются для выполнения глушения вибраций в режиме реального времени для интегрированного устройства 1-5 позиционирования с инерциальной вибрацией для того, чтобы повысить точность и производительность системы в режиме реального времени при определении положения и угла наклона. Анализатор 2-2 спектра и микропроцессор 3-2 установлены в электрическом шкафу 1-8 проходческого комбайна, а проходческий комбайн 1 оснащен загрузочной частью 1-4.
Как показано на ФИГ. 2, датчики 2-1 вибрации выполняют мониторинг состояния вибрации буровой части 1-2 проходческого комбайна в трех направлениях и передают сигнал вибрации на анализатор 2-2 спектра. Анализатор 2-2 спектра анализирует сигнал вибрации и выдает основную частотную область сигнала вибрации проходческого комбайна 1, обеспечивая анализ характеристической частоты для системы 3 глушения вибраций. Микропроцессор 3-2 принимает информацию о частоте, выданную анализатором 2-2 спектра, и регулирует коэффициент демпфирующего тока устройств 3-1 глушения вибраций с переменным демпфированием в соответствии с отношением между током возбуждения и собственной частотой интегрированного устройства 1-5 позиционирования с инерциальной вибрацией таким образом, чтобы интегрированное устройство 1-5 позиционирования с инерциальной вибрацией работало в среде, находящейся за пределами частоты возбуждения проходческого комбайна, тем самым реализуя глушение ответных вибраций интегрированного устройства 1-5 позиционирования с инерциальной вибрацией в режиме реального времени, а также дополнительно повышая надежность навигации положения и угла наклона.
Как показано на ФИГ. 3-5, каждое устройство 3-1 глушения вибраций с переменным демпфированием содержит каучуковый корпус 3-1-3, который внутри заполнен магнитным порошком 3-1-4 и на внутренней стенке которого установлена катушка 3-1-6 возбуждения. Верхний и нижний концы каучукового корпуса 3-1-3 снабжены, соответственно, верхним электромонтажным портом 3-1-2 и нижним электромонтажным портом 3-1-7, которые соединены, соответственно, с верхним и нижним концами катушки 3-1-6 возбуждения. Демпфирующий стержень 3-1-5, проходящий вверх и вниз, размещен посередине каучукового корпуса 3-1-3, причем верхний конец демпфирующего стержня 3-1-5 выступает из каучукового корпуса 3-1-3 и неподвижно размещен с помощью верхней опоры 3-1-1, а верхняя торцевая поверхность верхней опоры 3-1-1 прикреплена к нижней стороне интегрированного устройства 1-5 позиционирования с инерциальной вибрацией. Магнитный порошок 3-1-4 может обеспечивать переменное трение для демпфирующего стержня 3-1-5 в соответствии с различными токами в катушке 3-1-6 возбуждения, тем самым меняя стойкое к вибрации демпфирование устройства. Верхний электромонтажный порт 3-1-2 и нижний электромонтажный порт 3-1-7 представляют собой интерфейсы ввода тока возбуждения, который может реализовывать глушение вибраций с переменным демпфированием интегрированного устройства 1-5 позиционирования с инерциальной навигацией в направлениях x, y и z.
Три датчика 2-1 вибрации электрически соединены с анализатором 2-2 спектра, а анализатор 2-2 спектра, а также верхний электромонтажный порт 3-1-2 и нижний электромонтажный порт 3-1-7 каучукового корпуса 3-1-3 по отдельности электрически соединены с микропроцессором 3-2.
Как показано на ФИГ. 6, в настоящем изобретении также представлен способ применения системы глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, который, в частности, включает следующие этапы, на которых:
а. запускают электронную систему управления в проходческом комбайне 1 для подачи электропитания на датчики 2-1 вибрации, устройства 3-1 глушения вибраций с переменным демпфированием и интегрированное устройство 1-5 позиционирования с инерциальной навигацией; и вводят собственную частоту интегрированного устройства 1-5 позиционирования с инерциальной навигацией и собственные параметры устройств 3-1 глушения вибраций с переменным демпфированием;
б. запускают систему бурения и механизм 1-7 перемещения проходческого комбайна 1, перемещают проходческий комбайн 1 к рабочей поверхности и опускают ковшовую часть 1-3 и задние упоры 1-9 для фиксации проходческого комбайна 1;
в. обнаруживают, посредством датчиков 2-1 вибрации в трех направлениях, состояние вибрации буровой части 1-2 проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор 2-2 спектра для анализа спектра; и вычисляют, посредством анализатора 2-2 спектра, основную частотную область проходческого комбайна 1 во время холостого режима работы;
г. вводят, посредством анализатора 2-2 спектра, основную частотную область проходческого комбайна 1 во время холостого режима работы в микропроцессор 3-2; и определяют, посредством микропроцессора 3-2, то, превышает или равняется ли основная частотная область проходческого комбайна 1 во время холостого режима работы на этапе в удвоенной собственной частоте интегрированного устройства 1-5 позиционирования с инерциальной навигацией на этапе а;
д. если результат определения на этапе г является положительным, то отправляют, посредством микропроцессора 3-2, сигнал управления проходческим комбайном 1 для выполнения предварительной операции бурения и выполняют этап ж;
е. если результат определения на этапе г является отрицательным, то вычисляют, посредством микропроцессора 3-2 проходческого комбайна, соотношение λ основной частотной области проходческого комбайна 1 во время холостого режима работы к собственной частоте интегрированного устройства 1-5 позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств 3-1 глушения вибраций с переменным демпфированием, причем λ задают, как превышающее или равняющееся m; а m является числовым значением, которое в целом больше или равно 2, и его определяют в зависимости от конкретной ситуации; и регулируют ток возбуждения устройств 3-1 глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап в;
ж. обнаруживают, посредством датчиков 2-1 вибрации в трех направлениях, состояние вибрации буровой части 1-2 проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор 2-2 спектра для анализа спектра; и вычисляют, посредством анализатора 2-2 спектра, основную частотную область проходческого комбайна 1 в состоянии бурения;
з. вводят, посредством анализатора 2-2 спектра, основную частотную область проходческого комбайна в состоянии бурения в микропроцессор 3-2; и определяют, посредством микропроцессора 3-2, то, превышает или равняется ли основная частотная область проходческого комбайна 1 в состоянии бурения на этапе ж удвоенной собственной частоте интегрированного устройства 1-5 позиционирования с инерциальной навигацией на этапе а;
и. если результат определения на этапе з является положительным, то автоматически выполняют, посредством проходческого комбайна 1, операцию бурения и выполняют этап л;
к. если результат определения на этапе з является отрицательным, то вычисляют, посредством микропроцессора 3-2 проходческого комбайна, соотношение ζ основной частотной области проходческого комбайна 1 в состоянии бурения к собственной частоте интегрированного устройства 1-5 позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств 3-1 глушения вибраций с переменным демпфированием, причем ζ задают, как превышающее или равняющееся n, а n является числовым значением, которое в целом больше или равно 2, и его определяют в зависимости от конкретной ситуации; и регулируют ток возбуждения устройств 3-1 глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап ж; и
л. обнаруживают, посредством системы 2 мониторинга, состояние вибрации проходческого комбайна 1 в режиме реального времени, а также выполняют точное управление и выдачу рабочего положения и угла наклона проходческого комбайна 1 в режиме реального времени посредством системы 3 глушения вибраций.
Настоящее изобретение может обнаруживать частоту возбуждения проходческого комбайна в режиме реального времени, а также может регулировать жесткость соединения и демпфирование между интегрированным устройством позиционирования с инерциальной навигацией и проходческим комбайном путем использования устройств глушения вибраций с переменным демпфированием, повышая точность и производительность навигации и позиционирования проходческого комбайна в режиме реального времени, а также повышая качество конструирования и формирования пути. В частности, настоящее изобретение применимо к полностью механизированной выемке подземного пути, а также способствует реализации интеллектуальных и автоматических операций проходческого комбайна.
Очевидно, специалист в данной области техники может сделать различные изменения и модификации в настоящем изобретении без выхода за рамки сущности и объема настоящего изобретения. Таким образом, если такие модификации и вариации настоящего изобретения попадают в пределы объема прилагаемой формулы изобретения и ее эквивалентной технологии, то подразумевается, что настоящее изобретение также охватывает эти модификации и вариации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНЫ | 2018 |
|
RU2711418C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЫСОТЫ АВТОМАТИЧЕСКОЙ ВРУБОВОЙ МАШИНЫ НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ ВРУБОВОЙ МАШИНЫ И СПОСОБ ТАКОГО РЕГУЛИРОВАНИЯ | 2018 |
|
RU2707218C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОХОДЧЕСКИМ КОМБАЙНОМ НА ОСНОВЕ БИНОКУЛЯРНОГО ЗРЕНИЯ | 2022 |
|
RU2804654C1 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ОБРАБОТКИ КОММУНИКАЦИОННЫХ СООБЩЕНИЙ | 2015 |
|
RU2648264C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТИ ПРОХОДКИ ПРОХОДЧЕСКОГО КОМБАЙНА | 2020 |
|
RU2792054C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| Мобильная береговая радиолокационная станция загоризонтного обнаружения с повышенной скрытностью излучения | 2020 |
|
RU2766934C1 |
| СПОСОБ АВТОНОМНОГО ПОВЫШЕНИЯ ТОЧНОСТИ ПРИМЕНЕНИЯ МИКРОМЕХАНИЧЕСКОЙ ЭЛЕМЕНТНОЙ БАЗЫ | 2018 |
|
RU2698547C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОПОРНОЙ СЕТИ | 2016 |
|
RU2687040C1 |
Группа изобретений относится к машиностроению. Заявленная система содержит систему мониторинга и систему глушения вибраций. Система мониторинга содержит анализатор (2-2) спектра и три датчика (2-1) вибрации, которые закреплены на буровой части (1-2) проходческого комбайна. Система глушения вибраций содержит микропроцессор (3-2) и устройства (3-1) глушения вибраций с переменным демпфированием, которые равномерно распределены по периферийной кромке вращающейся платформы (1-6) и используются для пеленгации интегрированного устройства (1-5) позиционирования с инерциальной вибрацией. Три датчика (2-1) вибрации электрически соединены с анализатором (2-2) спектра. Анализатор (2-2) спектра, а также верхний и нижний электромонтажные порты устройства (3-1) глушения вибраций с переменным демпфированием по отдельности электрически соединены с микропроцессором (3-2). Способ раскрывает применение системы для устройства позиционирования. Достигается повышение чувствительности к положению и углу наклона, а также повышение точности и производительности устройства позиционирования в режиме реального времени. 2 н. и 3 з.п. ф-лы, 6 ил.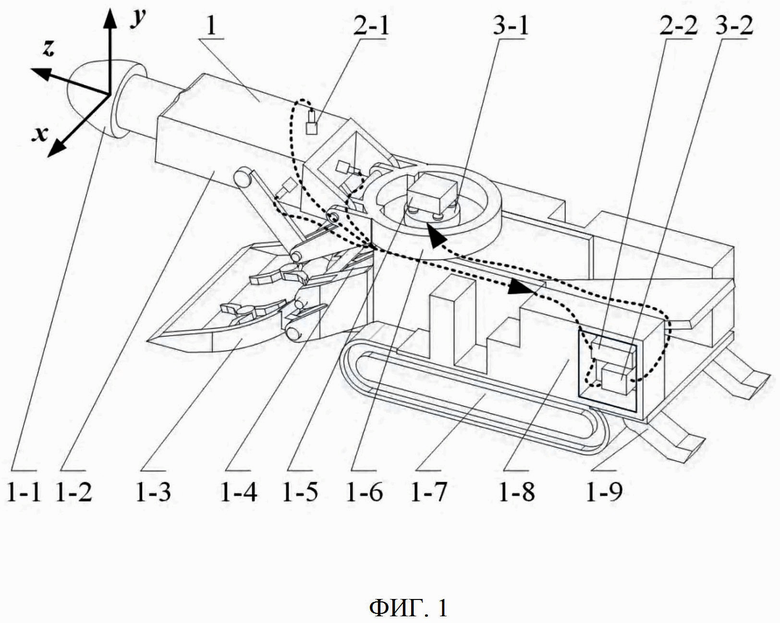
1. Система глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, которая содержит систему (2) мониторинга и систему (3) глушения вибраций, причем система (2) мониторинга содержит анализатор (2-2) спектра и три датчика (2-1) вибрации, которые закреплены на буровой части (1-2) проходческого комбайна и совпадают соответственно с поперечным направлением x, вертикальным направлением y и горизонтальным направлением z проходческого комбайна; а система (3) глушения вибраций содержит микропроцессор (3-2) и несколько устройств (3-1) глушения вибраций с переменным демпфированием, которые равномерно распределены по периферийной кромке вращающейся платформы (1-6) и используются для пеленгации интегрированного устройства (1-5) позиционирования с инерциальной вибрацией;
каждое устройство (3-1) глушения вибраций с переменным демпфированием содержит каучуковый корпус (3-1-3), который внутри заполнен магнитным порошком (3-1-4) и на внутренней стенке которого установлена катушка (3-1-6) возбуждения; верхний и нижний концы каучукового корпуса (3-1-3) снабжены соответственно верхним электромонтажным портом (3-1-2) и нижним электромонтажным портом (3-1-7), которые соединены соответственно с верхним и нижним концами катушки (3-1-6) возбуждения; демпфирующий стержень (3-1-5), проходящий вверх и вниз, размещен посередине каучукового корпуса (3-1-3), причем верхний конец демпфирующего стержня (3-1-5) выступает из каучукового корпуса (3-1-3) и неподвижно размещен с помощью верхней опоры (3-1-1), а верхняя торцевая поверхность верхней опоры (3-1-1) прикреплена к нижней стороне интегрированного устройства (1-5) позиционирования с инерциальной вибрацией; три датчика (2-1) вибрации электрически соединены с анализатором (2-2) спектра; а анализатор (2-2) спектра, а также верхний электромонтажный порт (3-1-2) и нижний электромонтажный порт (3-1-7) устройства (3-1) глушения вибраций с переменным демпфированием по отдельности электрически соединены с микропроцессором (3-2).
2. Система по п. 1, отличающаяся тем, что анализатор (2-2) спектра и микропроцессор (3-2) установлены в электрическом шкафу (1-8) проходческого комбайна.
3. Система по п. 1, отличающаяся тем, что предусмотрено четыре устройства (3-1) глушения вибраций с переменным демпфированием.
4. Способ применения системы по п. 1, который, в частности, включает следующие этапы, на которых:
а) запускают электронную систему управления в проходческом комбайне (1) для подачи электропитания на датчики (2-1) вибрации, устройства (3-1) глушения вибраций с переменным демпфированием и интегрированное устройство (1-5) позиционирования с инерциальной навигацией; и вводят собственную частоту интегрированного устройства (1-5) позиционирования с инерциальной навигацией и собственные параметры устройств (3-1) глушения вибраций с переменным демпфированием;
б) запускают систему бурения и механизм (1-7) перемещения проходческого комбайна (1), перемещают проходческий комбайн (1) к рабочей поверхности и опускают ковшовую часть (1-3) и задние упоры (1-9) для фиксации проходческого комбайна (1);
в) обнаруживают, посредством датчиков (2-1) вибрации в трех направлениях, состояние вибрации буровой части (1-2) проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор (2-2) спектра для анализа спектра; и вычисляют, посредством анализатора (2-2) спектра, основную частотную область проходческого комбайна (1) во время холостого режима работы;
г) вводят, посредством анализатора (2-2) спектра, основную частотную область проходческого комбайна (1) во время холостого режима работы в микропроцессор (3-2); и определяют, посредством микропроцессора (3-2), то, превышает или равняется ли основная частотная область проходческого комбайна (1) во время холостого режима работы на этапе в удвоенной собственной частоте интегрированного устройства (1-5) позиционирования с инерциальной навигацией на этапе а;
д) если результат определения на этапе г является положительным, то отправляют, посредством микропроцессора (3-2), сигнал управления проходческим комбайном (1) для выполнения предварительной операции бурения и выполняют этап ж;
е) если результат определения на этапе г является отрицательным, то вычисляют, посредством микропроцессора (3-2) проходческого комбайна, соотношение λ основной частотной области проходческого комбайна (1) во время холостого режима работы к собственной частоте интегрированного устройства (1-5) позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств (3-1) глушения вибраций с переменным демпфированием, причем λ задают как превышающее или равняющееся m; и регулируют ток возбуждения устройств (3-1) глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап в;
ж) обнаруживают, посредством датчиков (2-1) вибрации в трех направлениях, состояние вибрации буровой части (1-2) проходческого комбайна в режиме реального времени и передают сигнал вибрации в режиме реального времени на анализатор (2-2) спектра для анализа спектра; и вычисляют, посредством анализатора (2-2) спектра, основную частотную область проходческого комбайна (1) в состоянии бурения;
з) вводят, посредством анализатора (2-2) спектра, основную частотную область проходческого комбайна в состоянии бурения в микропроцессор (3-2); и определяют, посредством микропроцессора (3-2), то, превышает или равняется ли основная частотная область проходческого комбайна (1) в состоянии бурения на этапе ж удвоенной собственной частоте интегрированного устройства (1-5) позиционирования с инерциальной навигацией на этапе а;
и) если результат определения на этапе з является положительным, то автоматически выполняют, посредством проходческого комбайна (1), операцию бурения и выполняют этап л;
к) если результат определения на этапе з является отрицательным, то вычисляют, посредством микропроцессора (3-2), соотношение ζ основной частотной области проходческого комбайна (1) в состоянии бурения к собственной частоте интегрированного устройства (1-5) позиционирования с инерциальной навигацией и далее вычисляют параметры регулирования тока устройств (3-1) глушения вибраций с переменным демпфированием, причем ζ задают как превышающее или равняющееся n; и регулируют ток возбуждения устройств (3-1) глушения вибраций с переменным демпфированием в соответствии с вычисленными параметрами регулирования тока и повторяют этап ж; и
л) обнаруживают, посредством системы (2) мониторинга, состояние вибрации проходческого комбайна (1) в режиме реального времени, а также выполняют точное управление и выдачу рабочего положения и угла наклона проходческого комбайна (1) в режиме реального времени посредством системы (3) глушения вибраций.
5. Способ по п. 4, отличающийся тем, что m и n на этапах е и к являются числовыми значениями, которые в целом больше или равны 2, и их определяют в зависимости от конкретной ситуации.
| CN 110736458 A, 31.01.2020 | |||
| FR 3074894 B1, 03.01.2020 | |||
| Активное виброзащитное устройство | 1980 |
|
SU896279A1 |

