Изобретение относится к области цветной металлургии, в частности к получению катодного никеля, а так же любых металлов, получаемых на основе процессов электролиза. Устройство может применяться в составе автоматизированной линии сдирки и подготовки основ, промывки катодного никеля, обработки и упаковки катодного никеля.
Захватный механизм предназначен для снятия и установки компонентов матричного и товарного электролиза (матриц или основ). Например: из электролизной ванны на стеллаж или со стеллажа в электролизную ванну.
Из уровня техники известно устройство (Патент SU 927710 от 15.05.82), содержащее траверсу, снабженную скобами для навешивания ее на крюк крана. Траверса выполнена в форме параллелограмма и имеет приводные устройства для изменения расстояния между захватными устройствами. Однако это устройство имеет существенный недостаток. Оно не имеет возможности поворота захватных устройств (зацепов) вокруг вертикальной оси для свободного выведения между перемещенными компонентами при малом расстоянии между ними.
Задачей изобретения является создание захватного механизма с механизмами поворота зацепов с помощью маховиков. Технический результат - расширение технологических возможностей захватного механизма.
Поставленная задача решается тем, что захватный механизм содержит траверсу с зацепами и приводными устройствами для изменения расстояния между зацепами, причем траверса выполнена в виде рамы с изменяемой геометрией, рама содержит соединенные с помощью шарниров металлические пластины, на концах которых размещены в два ряда зацепы, при этом указанные приводные устройства представляют собой два крайних маховика и средний маховик, который предназначен для изменения расстояния между зацепами и закреплен на валу с правой и левой резьбой, соединенном с гайками, закрепленными на осях указанных шарниров, каждый крайний маховик соединен со своим рядом зацепов из указанных двух рядов зацепов для поворота зацепов вокруг вертикальной оси.
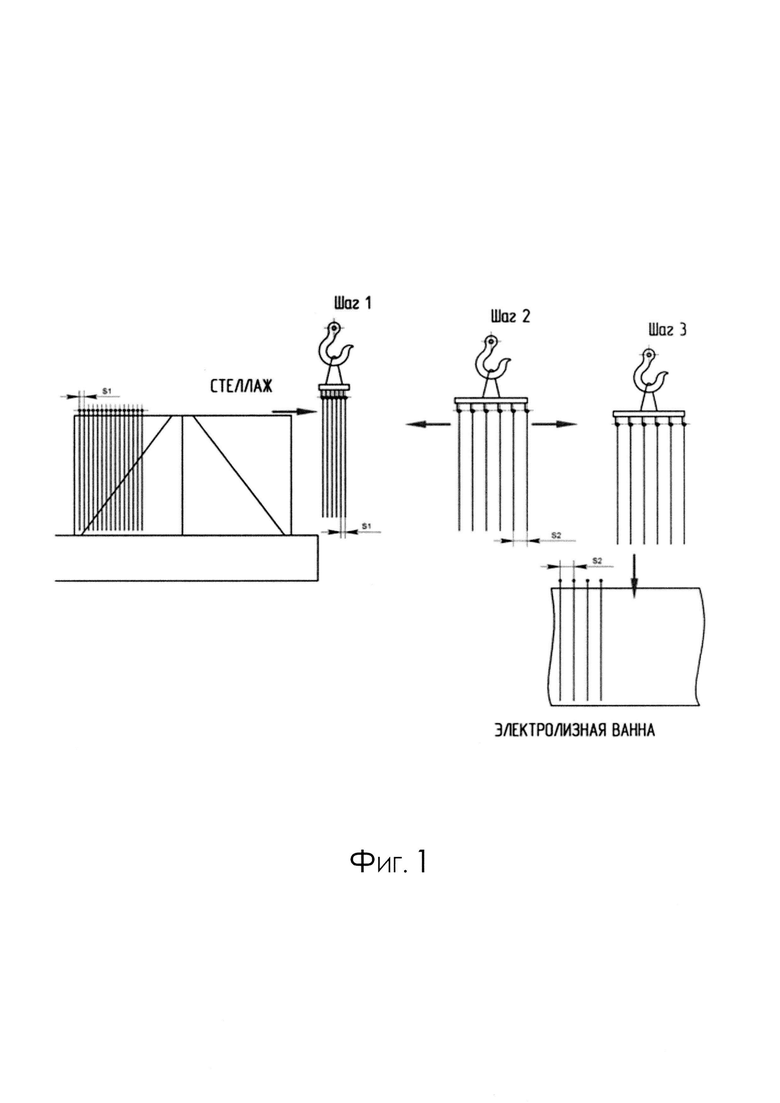
Принцип работы захватного механизма представлен на фиг. 1 и фиг. 2:
Шаг 1 - Захват компонентов (матриц или основ) на стеллаже, зацепы установлены в положение 1, расстояние между компонентами S1.
Шаг 2 - Перевод захвата в положение 2, компоненты разведены на межцентровое расстояние S2.
Шаг 3 - Установка компонентов в электролизную ванну.
Механизированный захват представляет собой устройство для проведения разгрузочных, погрузочных работ и перемещения матриц между электролизными ваннами и специализированной технологической тарой, с возможностью изменения расстояния между транспортируемыми элементами в диапазоне от S1 до S2. При помощи механизированного захвата может быть осуществлена транспортировка трех видов компонентов матриц с основами и без, собранных основ на штанге и товарных катодов.
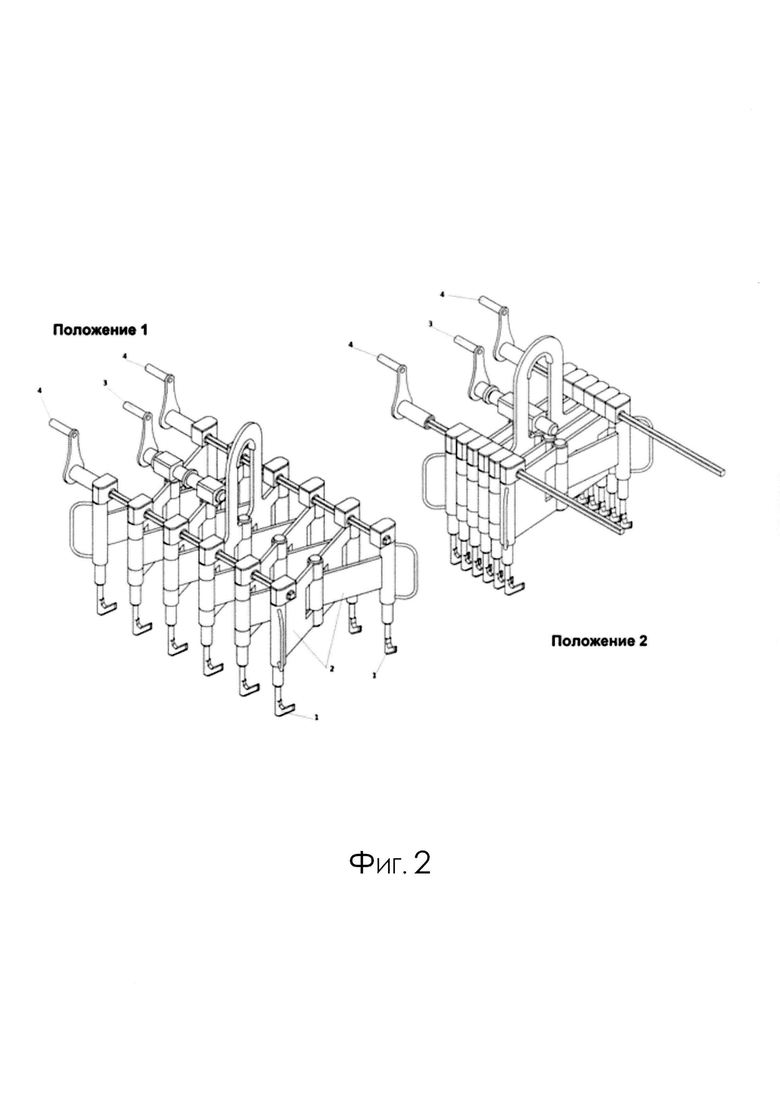
В предлагаемой конструкции указанный недостаток прототипа устранен тем, что устройство содержит механизмы поворота зацепов, состоящих из двух боковых маховиков 4, вращение которых обеспечивают поворот зацепов 1 относительно вертикальной оси на необходимый угол.
Конструктивно захват выполнен как набор из расположенных попарно зацепов (1) на металлической раме с изменяемой геометрией (2). Захват оснащен тремя маховиками, один из которых 3 отвечает за изменение расстояния между зацепами. При вращении маховика поворачивают вал со встречной (правой и левой) резьбой, изменяя расстояние между зацепами. Два боковых маховика 4 отвечают за угол разворота зацепов. Вращение боковых маховиков обеспечивает поворот зацепов 1 относительно вертикальной оси на угол, достаточный для выведения их из установленных с необходимым шагом компонентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАГРУЗКИ БИГ-БЭГОВ В КОНТЕЙНЕРЫ | 2019 |
|
RU2704275C1 |
| СКЛАДЫВАЕМАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2018 |
|
RU2703590C1 |
| ПРОМЫВОЧНАЯ МАШИНА КАРУСЕЛЬНОГО ТИПА | 2018 |
|
RU2703641C1 |
| ВАГОНЕТКА ДЛЯ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2019 |
|
RU2709985C1 |
| Захватное устройство | 1986 |
|
SU1493586A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| РЕЛЬСОВЫЙ ЗАХВАТ | 2011 |
|
RU2484195C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2013347C1 |
| Захватное устройство для труб | 1979 |
|
SU850543A1 |
| БУРОВОЙ СТАНОК | 2010 |
|
RU2435923C1 |
Изобретение относится к области цветной металлургии. Захватный механизм содержит траверсу с зацепами и приводными устройствами для изменения расстояния между зацепами, причем траверса выполнена в виде рамы с изменяемой геометрией, рама содержит соединенные с помощью шарниров металлические пластины, на концах которых размещены в два ряда зацепы. Приводные устройства представляют собой два крайних маховика и средний маховик, который предназначен для изменения расстояния между зацепами и закреплен на валу с правой и левой резьбой, соединенном с гайками, закрепленными на осях указанных шарниров, каждый крайний маховик соединен со своим рядом зацепов из указанных двух рядов зацепов для поворота зацепов вокруг вертикальной оси. Достигается расширение технологических возможностей захватного механизма. 2 ил.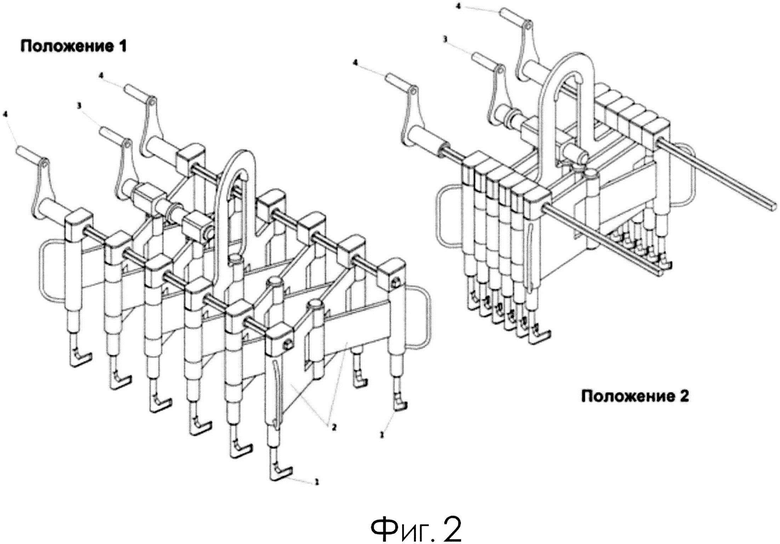
Захватный механизм, содержащий траверсу с зацепами и приводными устройствами для изменения расстояния между зацепами, отличающийся тем, что траверса выполнена в виде рамы с изменяемой геометрией, рама содержит соединенные с помощью шарниров металлические пластины, на концах которых размещены в два ряда зацепы, при этом указанные приводные устройства представляют собой два крайних маховика и средний маховик, который предназначен для изменения расстояния между зацепами и закреплен на валу с правой и левой резьбой, соединенном с гайками, закрепленными на осях указанных шарниров, каждый крайний маховик соединен со своим рядом зацепов из указанных двух рядов зацепов для поворота зацепов вокруг вертикальной оси.
| Захватное устройство для контейнеров | 1978 |
|
SU765185A1 |
| Захват для транспортирования пакетов листов или других грузов | 1960 |
|
SU135618A1 |
| Грузозахватное устройство | 1980 |
|
SU927710A1 |
| KR 1020140095699 A, 04.08.2014. | |||

