Изобретение относится к области добычи полезных ископаемых из россыпных месторождений закрытым (шахтным) способом, и может быть использовано в тяжелых условиях Севера при разработке подземных месторождений полезных ископаемых, в частности, золота с последующим конвейерным транспортированием породы.
Если открытая добыча не имеет смысла, например, при залегании золота глубоко под землей, или она невозможна по другим причинам, используется подземная разработка. Роль подземной добычи в обеспечении основных полезных ископаемых остается значительной. Этому способствуют достижения в области технологии и механизации горных работ. При подземной добыче в районах Крайнего Севера широко применяется система формирования горной выработки, когда вскрытие месторождений проводится наклонными стволами (А.С. Воронюк «Схемы и параметры вскрытия рудных месторождений. М.: Наука. 1993. с. 88). Схемы требуют выполнения подготовительных выработок, для чего в последнее время начали применять горнопроходческие роботы.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение максимального использования ресурсов, вложенных в оборудование и инфраструктуру. Самые большие возможности для экономии средств заключаются в изменении процессов, на которые приходится большая часть расходов, а именно процессов, связанных с перемещением добываемой породы.
Известен способ подземной разработки месторождений полезных ископаемых (патент RU 2346157, опублик. 10.02.2005), включающий вскрытие и подготовку зон добычи путем формирования наклонного ствола, соединенных с ним наклонных вскрывающих выработок рабочих горизонтов, прокладку по ним рельсовых направляющих, использование подъемной установки для подъема по наклонным выработкам и стволу добытой породы. Подъемная установка включает подъемные контейнеры, навешенные на канаты, подъемную машину, отклоняющие шкивы, через которые пропущены канаты. Вскрывающие выработки рабочих горизонтов формируют с углом наклона, меньшим угла наклона ствола, в зоне загрузки породы вскрывающие выработки соединяют перегрузочными камерами с выработками доставочных горизонтов, по которым с помощью самоходных погрузочно-доставочных машин порода доставляется из зоны извлечения породы в зону загрузки. Погрузочно-доставочные машины в выработки доставочных горизонтов спускают по наклонному съезду, проходящему с поверхности. Сопряжения ствола и вскрывающих выработок оборудуют соединительными платформами и в их кровле устанавливают отклоняющие шкивы. Загрузку подъемных контейнеров осуществляют в зоне загрузки породы с помощью погрузочно-доставочных машин, курсирующих по доставочным горизонтам. На работающих горизонтах осуществляют наложение соединительной платформы на рельсовые направляющие наклонного ствола, при этом на вышележащих горизонтах соединительной платформе придают положение для беспрепятственного прохода подъемных контейнеров. Соединительная платформа выполнена в виде жесткой рамы из криволинейных рельсовых направляющих и закреплена в почве наклонных выработок рабочих горизонтов шарнирно.
Недостатком такого способа подземной добычи является то, что для загрузки контейнеров используют погрузочно-доставочные машины, которые курсируют от места добычи породы до места ее загрузки в контейнеры, что требует расширения проходов, формирования доставочных горизонтов, съездов, что усложняет технологический цикл и ограничивает эксплуатационные возможности способа. Кроме того, добыча в соответствии с данным способом является периодическим процессом, потому что после извлечения породы производится ее доставка к месту загрузки погрузочно-доставочными машинами, работающими в цикле, который включает в себя: загрузку, перемещение на разгрузку, разгрузку и перемещение назад, чтобы загрузить другую партию. Снижение затрат и времени, необходимых для разработки рудника, является важным фактором минимизации капиталоемкости.
Наиболее близким по решаемой задаче и количеству сходных признаков к заявляемому способу является способ, описанный в патентной заявке ЕР 3090968 (публик. 09.11.2016). В этом способе для обеспечения механизации и автоматизации процесса извлечения, загрузки и доставки породы обеспечивают его непрерывность, что позволит максимально использовать ресурсы, вложенные в оборудование и инфраструктуру. Способ включает формирование выработок добычи полезных ископаемых для подготовки зон извлечения и загрузки породы, обеспечение транспортировочного пути для транспортировки добытой породы, погрузочно-разгрузочные работы с извлечением породы в нескольких зонах выработки с помощью выемочно-погрузочных машин, которые размещают вдоль конвейерной линии, перемещающей контейнеры, загруженные добытой породой. Конвейерная линия размещена в зоне выработки и выполнена с возможностью транспортировки породы в горизонтальном направлении для поставки ее на дробильные установки или на другой конвейер для доставки в зону переработки. Пример способа разрушения породы, используемого для формирования выработок, чтобы обеспечить ее непрерывную добычу, раскрыт в заявке WO 2010/061274, публик. 03.06.2010. В качестве выемочно-погрузочных машин используют роботизированную технику, в частности, бульдозеры, работающие от гидроцилиндров по определенной программе. Способ дополнительно включает следующие этапы: предварительное определение количества загружаемой породы в единицу времени, распределение нагрузки на конвейер, скорость движения конвейерной линии, скорость погрузочно-разгрузочных работ. правление всем процессом осуществляют с помощью управляющего блока, содержащего память, процессор, интерфейсы связи и другие компоненты, необходимые для запуска компьютерной программы, содержащей исполняемые компьютером инструкции, которые заставляют блок выполнять этапы способа, раскрытые в данной заявке. Конвейерная линия и выемочно-погрузочные машины работают непрерывно во время погрузочно-разгрузочных работ. Предполагается, что блок управления может включать в себя множество блоков управления, связанных друг с другом, и что компьютерная программа может включать в себя множество модулей, каждый из которых работает на отдельном блоке управления. Поскольку из-за суровых условий на некоторых подземных горных объектах использование датчиков для определения распределения нагрузки может быть трудным, даже неневозможным, то для обеспечения непрерывности процесса в способе по патентной заявке ЕР 3090968 вычисление распределения нагрузки осуществляют без использования таких датчиков.
Недостатком ближайшего аналога является необходимость использования нескольких конвейерных линий с перегрузкой породы с одного конвейера на другой, если требуется его доставить, например, из подземной выработки на поверхность, что усложняет способ и снижает его технологичность. При разработке месторождений полезных ископаемых часто требуется бесперегрузочное транспортирование породы из зоны добычи на поверхность, что ближайший аналог обеспечить не может.
Техническим результатом заявляемого изобретения является упрощение и повышение технологичности способа.
Указанный технический результат достигается за счет того, что в способе подземной разработки месторождений полезных ископаемых, включающем формирование подземных выработок для подготовки зон извлечения и загрузки породы, осуществление непрерывных погрузочно-разгрузочных работ с помощью робототехники и последующей транспортировкой породы конвейерным способом к месту назначения, новым является то, что непрерывную транспортировку породы осуществляют путем формирования пространственно изгибающейся замкнутой трассы, по которой прокладывают конвейерную линию, идущую с поверхности по наклонному стволу, соединенному с подземной выработкой, и далее по выработке и другому наклонному стволу на поверхность, при этом тяговый орган конвейерной линии выполняют с распределенными по всей его длине грузовыми отсеками, с возможностью удержания в них породы при транспортировке по наклонным участкам трассы, а запуск конвейерной линии осуществляют от размещенного на поверхности электропривода для обеспечения перемещения порожних грузовых отсеков по поверхности и наклонному стволу в зону загрузки породы, а после загрузки их породой дальнейшего перемещения по другому столбу на поверхность с последующей выгрузкой и повторения процесса.
Осуществление непрерывной транспортировки породы путем формирования пространственно изгибающейся замкнутой трассы, по которой прокладывают конвейерную линию, идущую с поверхности по наклонному стволу, соединенному с подземной выработкой, и далее по выработке и другому наклонному стволу на поверхность, позволяет обеспечить пространственную гибкость конвейерной линии, уменьшить объем, необходимый под размещения оборудования, упростить эксплуатацию, не применяя дополнительных агрегатов.
Выполнение тягового органа конвейерной линии с размещенными по всей длине грузовыми отсеками, с возможностью удержания в них породы при транспортировке по наклонным участкам, позволяет наиболее простым способом обеспечить непрерывность процесса и сократить время на доставку породы на поверхность после ее извлечения.
Обеспечение запуска конвейерной линии от размещенного на поверхности электропривода позволяет упростить обслуживание и эксплуатацию конвейерной линии.
Обеспечение перемещения порожних грузовых отсеков по поверхности, одному из наклонных стволов в зону загрузки породы и дальнейшего их перемещения по другому столбу на поверхность с последующей выгрузкой и повторения процесса дает возможность транспортировки породы по пространственно изгибающейся трассе бесперегрузочным способом из подземной выработки на поверхность.
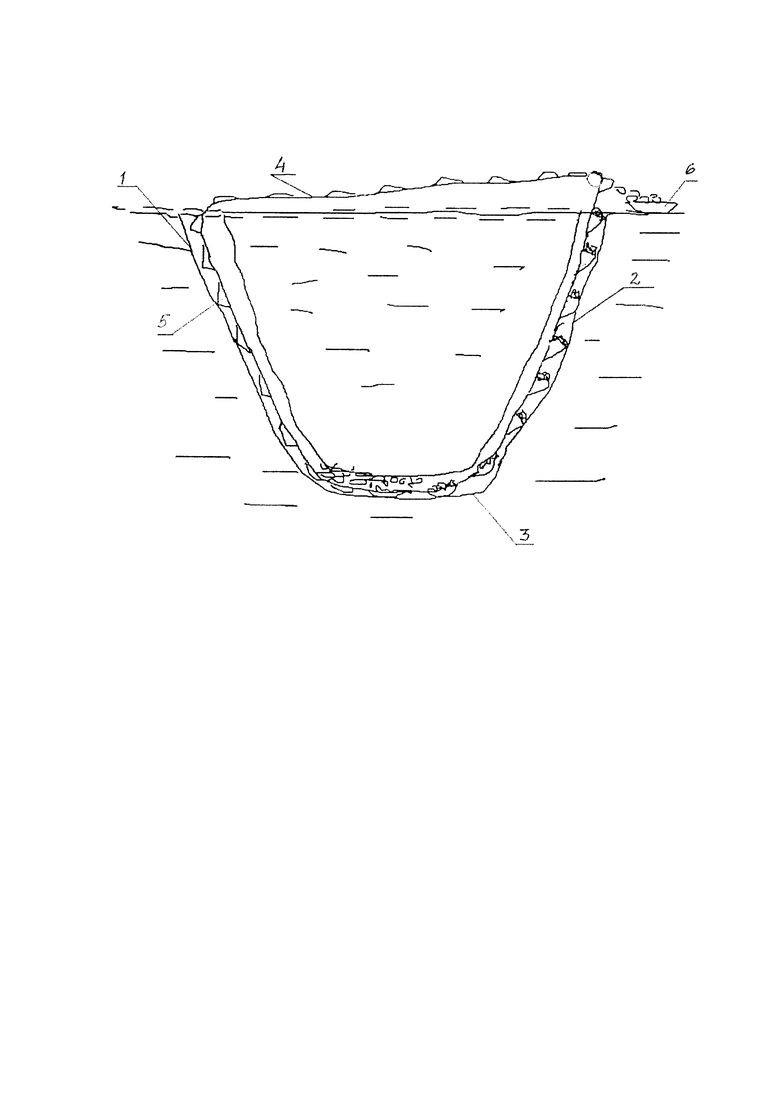
На фиг. представлена схема подземной разработки месторождений полезных ископаемых, где: 1 - наклонный ствол, спускающийся к подземной выработке и соединяющий ее с поверхностью; 2 - наклонный ствол, по которому осуществляют транспортировку добытой породы; 3 - подземная выработка; 4 - конвейерная линия; 5 - ковши; 6 - приемное устройство для разгрузки породы.
Заявляемый способ подземной разработки месторождений полезных ископаемых, в частности золота в условиях Крайнего Севера, может быть реализован следующим образом.
Производят подготовку зон добычи путем формирования двух наклонных стволов 1 и 2 и соединенной с ними подземной выработки 3 путем применения робототехники. Ствол выполняют диаметром 0,5-1 м, глубина ствола зависит от расположения месторождения. Глубина залегания золота 10-30 м. Формируют зону извлечения и загрузки в выработке 3, где будет работать горное оборудование. Обеспечивают транспортировочный путь для транспортировки добытой породы путем формирования пространственно изгибающейся замкнутой трассы, по которой прокладывают конвейерную линию, идущую с поверхности по наклонному стволу 1, соединенному с подземной выработкой 3, и далее по выработке 3 и другому наклонному стволу 2 на поверхность. Конвейерная линия может представлять ленточный или цепной конвейер, например, как в заявке WO 2017/097428, публик. 15.06.2017. Тяговый орган может быть выполнен в виде металлической ленты, огибающей барабаны, тянущих тросов, канатов, цепей и т.д. Тяговый орган конвейерной линии 4 выполняют с равномерно размещенными по всей его длине грузовыми отсеками, выполненным, например, в форме ковша 5, с возможностью удержания в них породы при транспортировке по наклонным участкам трассы. Ковши 5 жестко скреплены с тяговым органом. Запуск конвейерной линии осуществляют от размещенного на поверхности электропривода (на рисунке не показан), связанного, например, кинематически с приводным роликом, который может быть расположен над зоной разгрузки. Порожние ковши перемещают по поверхности, далее по одному из наклонных стволов 1 в зону загрузки породы 3. Погрузочный робот может быть выполнен двух функциональным, с функцией выемки породы и погрузки ее в ковш, например, как в заявке US 2016/0186566 (публик. 30.06.2016), кроме того, могут быть применены дополнительные бурильные агрегаты. В зоне загрузки осуществляют одновременное извлечение породы и заполнение породой ковшей 5. Дальнейшее перемещение загруженных ковшей 5 на поверхность осуществляют по другому наклонному столбу 2. Загруженная порода удерживается в ковшах 5 при перемещении по наклонному участку трассы с последующей выгрузкой в приемное устройство 6, размещенное на поверхности, и повторения стадии непрерывного процесса. Разгрузка может быть осуществлена как при опрокидывании ковшей, так и при автоматическом откидывании дна.
Таким образом, в соответствии с заявляемым изобретением, применение замкнутой мобильной конвейерной линии, проходящей по поверхности и подземной выработке, обеспечивает непрерывный процесс извлечения и подъема на поверхность полезных ископаемых из подземного месторождения более простым и технологичным методом, что повышает эффективность процесса. Кроме того, из-за снижения трудозатрат на обслуживание, заявляемый способ можно использовать как альтернативу на месторождениях, которые обычно разрабатываются открытым способом, поскольку открытый способ негативно влияет на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| СПОСОБ КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ | 2003 |
|
RU2269003C2 |
| СПОСОБ ВСКРЫТИЯ И ПОДГОТОВКИ РУДНЫХ ЗОН И ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА ДЛЯ СПОСОБА | 2005 |
|
RU2346157C2 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ ИЗ КАРЬЕРОВ И ШАХТ (ВАРИАНТЫ) | 1997 |
|
RU2136883C1 |
| СПОСОБ ОТРАБОТКИ КИМБЕРЛИТОВЫХ ТРУБОК В ЗОНЕ МНОГОЛЕТНЕЙ МЕРЗЛОТЫ | 1997 |
|
RU2132462C1 |
| СПОСОБ РАЗРАБОТКИ КРУТОПАДАЮЩИХ РУДНЫХ ТЕЛ | 1996 |
|
RU2117761C1 |
| СПОСОБ УПРАВЛЕНИЯ КАЧЕСТВОМ РУДЫ | 1999 |
|
RU2149996C1 |
| ТЕХНОЛОГИЧЕСКАЯ СХЕМА ВЫЕМОЧНОГО УЧАСТКА ПОДЗЕМНОЙ БЕЗОПАСНОЙ РАЗРАБОТКИ ВЫСОКОГАЗОНОСНОГО ПЛАСТА | 2018 |
|
RU2735072C2 |
| СПОСОБ РАЗРАБОТКИ НАГОРНОЙ ЧАСТИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1993 |
|
RU2038479C1 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2008 |
|
RU2367793C1 |
Изобретение относится к области добычи полезных ископаемых из россыпных месторождений закрытым (шахтным) способом, и может быть использовано в тяжелых условиях Севера при разработке подземных месторождений полезных ископаемых, в частности золота, с последующим конвейерным транспортированием породы. Техническим результатом является упрощение и повышение технологичности способа. Способ включает формирование подземных выработок для подготовки зон извлечения и загрузки породы, осуществление непрерывных погрузочно-разгрузочных работ с помощью робототехники и последующей транспортировкой породы конвейерным способом к месту назначения, при этом непрерывную транспортировку породы осуществляют путем формирования пространственно изгибающейся замкнутой трассы, по которой прокладывают конвейерную линию, идущую с поверхности по наклонному стволу, соединенному с подземной выработкой, и далее по выработке и другому наклонному стволу на поверхность, при этом тяговый орган конвейерной линии выполняют с распределенными по всей его длине грузовыми отсеками, с возможностью удержания в них породы при транспортировке по наклонным участкам трассы, а запуск конвейерной линии осуществляют от размещенного на поверхности электропривода для обеспечения перемещения порожних грузовых отсеков по поверхности и наклонному стволу в зону загрузки породы, а после загрузки их породой дальнейшего перемещения по другому столбу на поверхность с последующей выгрузкой и повторения процесса. 1 ил.
Способ подземной разработки месторождений полезных ископаемых, включающий формирование подземных выработок для подготовки зон извлечения и загрузки породы, осуществление непрерывных погрузочно-разгрузочных работ с помощью робототехники и последующей транспортировкой породы конвейерным способом к месту назначения, отличающийся тем, что непрерывную транспортировку породы осуществляют путем формирования пространственно изгибающейся замкнутой трассы, по которой прокладывают конвейерную линию, идущую с поверхности по наклонному стволу, соединенному с подземной выработкой, и далее по выработке и другому наклонному стволу на поверхность, при этом тяговый орган конвейерной линии выполняют с распределенными по всей его длине грузовыми отсеками, с возможностью удержания в них породы при транспортировке по наклонным участкам трассы, а запуск конвейерной линии осуществляют от размещенного на поверхности электропривода для обеспечения перемещения порожних грузовых отсеков по поверхности и наклонному стволу в зону загрузки породы, а после загрузки их породой дальнейшего перемещения по другому столбу на поверхность с последующей выгрузкой и повторения процесса.
| EP 3090968 A1, 09.11.2016 | |||
| Устройство для пуска и регулирования скорости вращения асинхронного двигателя | 1951 |
|
SU96493A1 |
| ОТКАТОЧНОЕ УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ ОТКАТКИ ДОБЫВАЕМОГО ПОД ЗЕМЛЕЙ МАТЕРИАЛА | 2006 |
|
RU2376476C2 |
| АГРЕГАТ СТАШЕВСКОГО И.И. ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 2005 |
|
RU2302528C1 |
| СПОСОБ ВСКРЫТИЯ И ПОДГОТОВКИ РУДНЫХ ЗОН И ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА ДЛЯ СПОСОБА | 2005 |
|
RU2346157C2 |
| RU 2011124898 A, 10.01.2013. | |||

