Изобретение относится к механическим системам относительного манипулирования, применяемым при проведении технологических и исследовательских процедур.
Известно трехподвижное устройство параллельной структуры «Дельта-робот» [Vischer P., Clavel R. Kinematic calibration of the parallel Delta robot. Robotica, 16(2), pp. 207-218, 1998; Fig. 1]. Устройство включает в свой состав стойку (неподвижное звено) и платформу (выходное звено), между которыми установлены три кинематические цепи, каждая из которых снабжена вращательным приводом. Недостатком данного устройства является отсутствие вращательных степеней свободы выходного звена.
Наиболее близким к предлагаемому устройству является другой тип трехподвижного «Дельта-робота» [Bouri М, Clavel R. The linear Delta: developments and applications. ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics), pp. 1-8, 2010, Fig. 20, 23]. Он имеет параллельную структуру и состоит из стойки (неподвижное звено) и платформы (выходное звено), между которыми установлены три кинематические цепи, каждая из которых включает линейную направляющую, жестко установленную на стойке, трехпарный (образующий с сопрягаемыми звеньями три кинематические пары) ползун и пару штанг. Каждая кинематическая цепь снабжена линейным приводом, а выходному звену обеспечиваются три поступательные степени свободы.
Данная модель «Дельта-робота» принимается за прототип предлагаемого изобретения. Недостаток прототипа заключается в отсутствии вращательных степеней свободы выходного звена. Данный недостаток ограничивает возможности применения прототипа, в том числе в технологиях по обработке элементов деталей машин.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании такого устройства, в котором кроме трех поступательных степеней свободы выходного звена, обеспечивались бы также и три вращательные.
Данная проблема решается тем, что в предлагаемом шестиподвижном пространственном устройстве параллельной структуры относительного манипулирования, включающем стойку и платформу, между которыми установлены кинематические цепи, состоящие из направляющих, жестко зафиксированных на стойке, трехпарных ползунов и штанг, согласно изобретению, устройство снабжено двухпарными ползунами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей равно четырем, кроме этого, устройство снабжено подвижной плитой, сопряженной тремя кинематическими цепями с круговой направляющей с нарезанными на ней зубьями, жестко установленной на стойке, где две кинематические цепи расположены по периметру и включают каретки с зубчатыми колесами, нижние вилки, шатуны и верхние вилки, а одна цепь расположена по центру и включает неподвижный стержень и U-образное звено, при этом нижние вилки образуют с каретками вращательные шарниры, а верхние вилки образуют с подвижной плитой жесткое соединение.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении трех дополнительных вращательных степеней свободы выходного звена. Данное преимущество способствует расширению возможностей практического применения предлагаемого устройства.
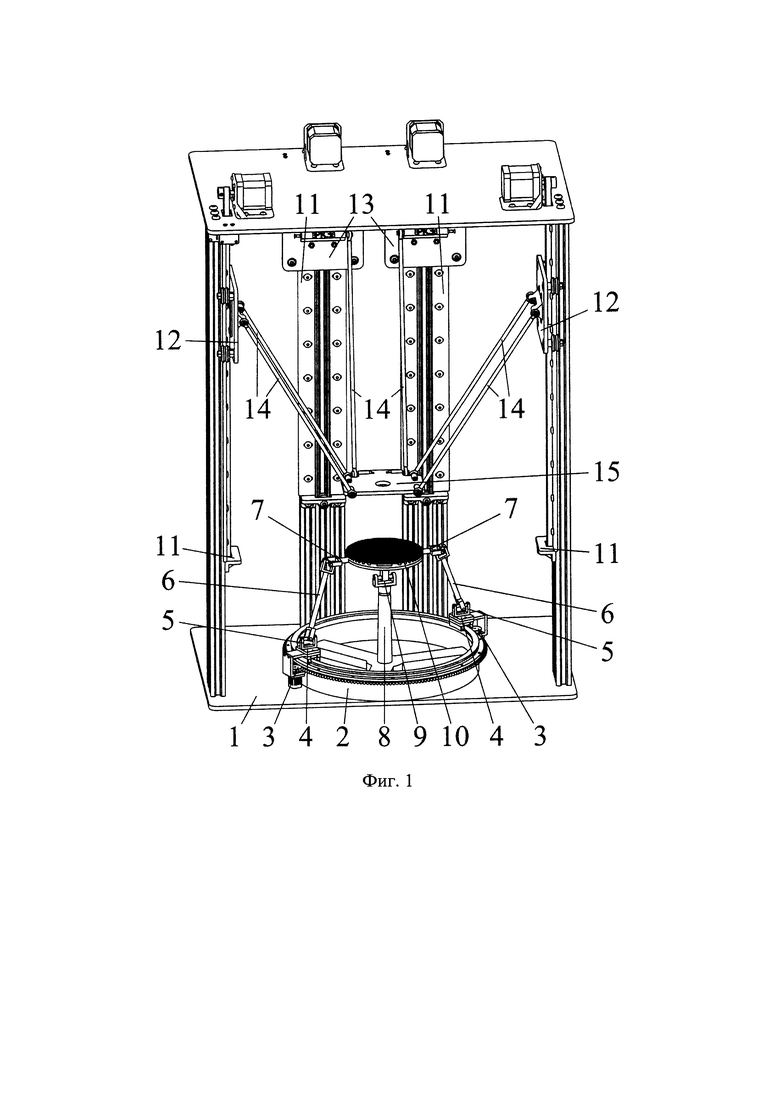
Изобретение поясняется чертежом, где на фиг. 1 показана модель шестиподвижного пространственного устройства параллельной структуры относительного манипулирования. Устройство включает в свой состав стойку (неподвижное звено) 1 с жестко зафиксированной на ней круговой направляющей 2, по периметру которой нарезаны зубья, и подвижную плиту
10, между которыми установлено две кинематические цепи, состоящие из кареток 4 с зубчатыми колесами 3, нижних вилок 5, шатунов 6 и верхних вилок 7, а также одна кинематическая цепь, состоящая из неподвижного стержня 8 и U-образного звена 9. Данные звенья образуют двухподвижный механизм параллельной структуры. Над этим механизмом на стойке 1 посредством четырех кинематических цепей установлена платформа 15. Указанные цепи выполнены двух типов. Первые состоят из направляющих 11, жестко установленных на стойке 1, трехпарных (образующих с сопрягаемыми звеньями три кинематические пары) ползунов 12 и штанг 14. Вторые состоят из направляющих 11, двухпарных (образующих с сопрягаемыми звеньями две кинематические пары) ползунов 13 и штанг 14. Данные звенья образуют четырехподвижный механизм параллельной структуры.
Зубчатые колеса 3, ползуны 12 и 13 являются приводными звеньями, которым задаются входные движения. Круговая направляющая 2 и зубчатые колеса 3 образуют зубчатое зацепление. Круговая направляющая 2 и каретки 4; каретки 4 и нижние вилки 5; неподвижный стержень 8 и U-образное звено 9; U-образное звено 9 и подвижная плита 10 образуют вращательные шарниры. Ползуны 12 и штанги 14; ползуны 13 и штанги 14; штанги 14 и платформа 15 образуют сферические шарниры. Направляющие 11 и ползуны 12; направляющие 11 и ползуны 13 образуют поступательные шарниры. Нижние вилки 5 и шатуны 6; шатуны 6 и верхние вилки 7 образуют карданные шарниры. Верхние вилки 7 и подвижная плита 10 образуют жесткое соединение.
Принцип работы предлагаемого устройства заключается в следующем. При задании движения зубчатым колесам 3, каретки 4 смещаются относительно круговой направляющей 2, установленной на стойке 1. Движение от кареток 4 передается нижним вилкам 5, далее шатунам 6 и верхним вилкам 7, ориентирующим подвижную плиту 10. При этом ограничения на движение подвижной плиты 10 накладываются центральной кинематической цепью, которая оставляет ей две вращательных степени свободы: наклон относительно вилки 9 за счет шарнира 9-10 и неограниченный поворот относительно продольной оси неподвижного стержня 8 за счет шарнира 8-9.
При смещении трехпарных и двухпарных ползунов 12 и 13 относительно направляющих 11, жестко установленных на стойке 1, движение передается на штанги 14 и далее на платформу 15. Так обеспечиваются четыре степени свободы платформе 15 (три линейных смещения и одно угловое).
Таким образом, в относительном манипулировании данное устройство имеет шесть степеней свободы.
Предлагаемое устройство может быть применено в процессах по обработке элементов деталей машин, в аддитивных технологиях, а также применениях, требующих шесть степеней свободы с относительным манипулированием, значительное линейное смещение в вертикальном направлении и неограниченный поворот вокруг вертикальной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ДЛЯ ШЛИФОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2023 |
|
RU2799610C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ЧЕТЫРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2023 |
|
RU2811198C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
Изобретение относится к области машиностроения, а более конкретно к механическим системам относительного манипулирования. Шестиподвижное пространственное устройство параллельной структуры относительного манипулирования включает стойку и платформу, между которыми установлены кинематические цепи. Цепи состоят из направляющих, жестко зафиксированных на стойке, трехпарных ползунов и штанг. Устройство снабжено двухпарными ползунами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей равно четырем. Кроме этого устройство снабжено подвижной плитой, сопряженной тремя кинематическими цепями с круговой направляющей с нарезанными на ней зубьями, жестко установленной на стойке, где две кинематические цепи расположены по периметру и включают каретки с зубчатыми колесами, нижние вилки, шатуны и верхние вилки. Одна цепь расположена по центру и включает неподвижный стержень и U-образное звено. Нижние вилки образуют с каретками вращательные шарниры, а верхние вилки образуют с подвижной плитой жесткое соединение. Достигается расширение области применения. 1 ил.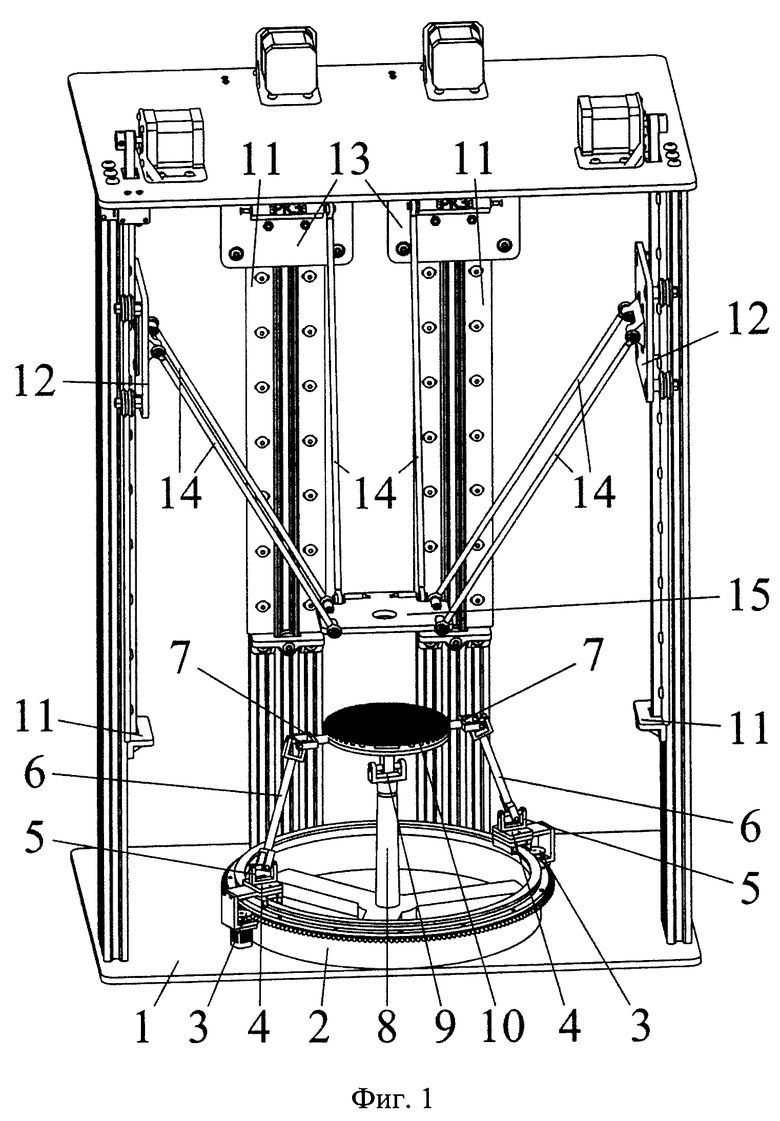
Шестиподвижное пространственное устройство параллельной структуры относительного манипулирования, включающее стойку и платформу, между которыми установлены кинематические цепи, состоящие из направляющих, жестко зафиксированных на стойке, трехпарных ползунов и штанг, отличающееся тем, что устройство снабжено двухпарными ползунами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей равно четырем, кроме этого устройство снабжено подвижной плитой, сопряженной тремя кинематическими цепями с круговой направляющей с нарезанными на ней зубьями, жестко установленной на стойке, где две кинематические цепи расположены по периметру и включают каретки с зубчатыми колесами, нижние вилки, шатуны и верхние вилки, а одна цепь расположена по центру и включает неподвижный стержень и U-образное звено, при этом нижние вилки образуют с каретками вращательные шарниры, а верхние вилки образуют с подвижной плитой жесткое соединение.
| US 2022281100 A1, 08.09.2022 | |||
| ТОРЦОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА | 0 |
|
SU206694A1 |
| РЕГИСТРАТОР ДЛЯ ЗАПИСИ КРИВЫХ | 0 |
|
SU182355A1 |
| МЕХАНИЗМ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2773552C1 |
