Изобретение относится к механическим системам параллельной структуры, применяемым при проведении технологических и исследовательских процедур.
Известен двухподвижный сферический механизм параллельной структуры [Rosheim М.Е. Multiple rotatable links robotic manipulator. US 5,893,296, applied 13.03.1997, published 13.04.1999]. Механизм включает в свой состав неподвижное звено (стойку) и выходное звено, между которыми установлены две кинематические цепи, состоящие из рычагов. Недостатком данного механизма является отсутствие дополнительной кинематической цепи между стойкой и выходным звеном. Это недостаток снижает нагрузочную способность механизма, т.е. ограничивает его применение в технике.
Наиболее близким к предлагаемому устройству является другой двухподвижный сферический механизм параллельной структуры [Duan X., Yang Y., Cheng В. Modeling and analysis of a 2-DOF spherical parallel manipulator. Sensors. 2016; 16(9): 1485, Fig. 1, 3]. Он состоит из неподвижного звена (стойки) и выходного звена (платформы), между которыми установлены три кинематические цепи, две из которых включают нижние и верхние рычаги, выполненные сферическими, а одна цепь состоит из неподвижного стержня и вилки.
Данный механизм принимается за прототип предлагаемого изобретения. Недостатком прототипа является отсутствие полного поворота выходного звена вокруг одной из осей. Кроме этого в прототипе отсутствует возможность изменения центра сферического движения, что сокращает число реализуемых разнотипных траекторий движения выходного звена.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании такого механизма, в котором обеспечивался бы полный поворот выходного звена, а также реализовывалась возможность изменения центра сферического движения.
Данная проблема решается тем, что в предлагаемом двухподвижном реконфигурируемом сферическом механизме с круговой направляющей, включающем стойку и платформу, между которыми установлены три кинематические цепи, две из которых включают нижние и верхние рычаги, а третья цепь состоит из стержня и вилки, согласно изобретению, стойка выполнена в виде круговой направляющей с нарезанными на ней зубьями, на которой размещены каретки с зубчатыми колесами, при этом каретки образуют вращательные шарниры с нижними рычагами, а между верхними рычагами и платформой установлены шатуны посредством вращательных шарниров, геометрические оси которых пересекаются в центре вращательного шарнира между вилкой и платформой, а стержень сопряжен с круговой направляющей посредством поступательного шарнира, при этом нижний и верхний рычаги выполнены плоскими.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении выходному звену полного поворота вокруг одной из осей, а также в возможности изменения центра сферического движения.
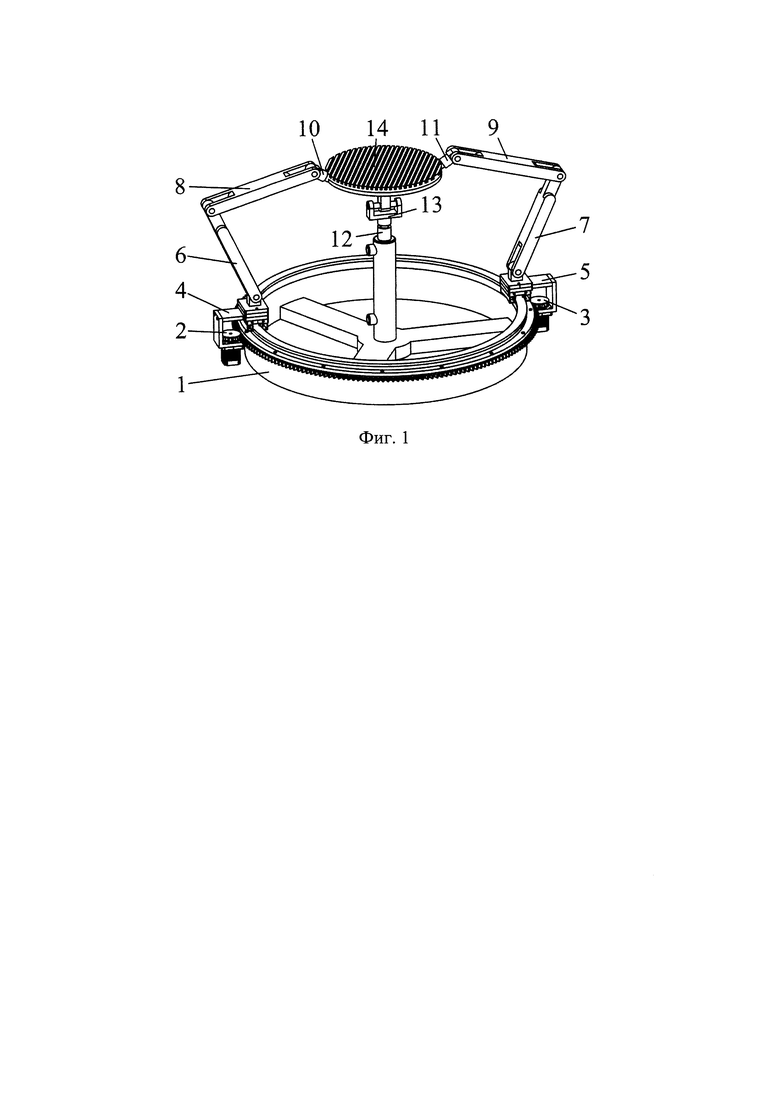
Изобретение поясняется чертежом, где на фиг. 1 показана модель двухподвижного реконфигурируемого сферического механизма с круговой направляющей. Механизм включает круговую направляющую 1 с нарезанными на ней зубьями, выполненную неподвижной, и выходное звено (платформу) 14, между которыми установлены две кинематические цепи, состоящие из кареток 4 и 5 с зубчатыми колесами 2 и 3, нижних рычагов 6 и 7, верхних рычагов 8 и 9 и шатунов 10 и 11, а также одна кинематическая цепь, расположенная в центре круговой направляющей 1 и состоящая из стержня 12 и вилки 13. Нижние рычаги 6 и 7 и верхние рычаги 8 и 9 выполнены плоскими.
Зубчатые колеса 2 и 3 являются приводными звеньями, которым задаются входные движения. Звенья 1 и 2; 1 и 3 образуют зубчатое зацепление. Звенья 1 и 4; 1 и 5; 4 и 6; 5 и 7; 6 и 8; 7 и 9; 8 и 10; 9 и 11; 10 и 14; 11 и 14; 12 и 13; 13 и 14 образуют вращательные шарниры. Звенья 1 и 12 образуют поступательный шарнир. Геометрические оси вращательных шарниров 10-14 и 11-14 пересекаются в центре вращательного шарнира 13-14.
Принцип работы предлагаемого механизма заключается в следующем. При задании движения зубчатым колесам 2 и 3, каретки 4 и 5 смещаются относительно круговой направляющей 1. Движение от кареток 4 и 5 передается нижним рычагам 6 и 7, затем верхним рычагам 8 и 9 и далее шатунам 10 и 11, ориентирующим платформу 14. При этом ограничения на движение платформы 14 накладываются центральной кинематической цепью, которая оставляет ей две вращательных степени свободы. Реконфигурация механизма (изменение центра сферического движения) обеспечивается за счет вертикального смещения стержня 12 относительно круговой направляющей 1. В этом случае центр вращательного шарнира 13-14 может быть установлен на заданной высоте.
Предлагаемый механизм может быть применен для позиционирования различных объектов при проведении технологических или исследовательских операций, а также при выполнении процедур, требующих полный (неограниченный) поворот вокруг вертикальной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
Изобретение относится к области машиностроения, а более конкретно к механическим системам параллельной структуры. Двухподвижный реконфигурируемый сферический механизм с круговой направляющей включает стойку и платформу, между которыми установлены три кинематические цепи, две из которых включают нижние и верхние рычаги, а третья цепь состоит из стержня и вилки. Стойка механизма выполнена в виде круговой направляющей с нарезанными на ней зубьями, на которой размещены каретки с зубчатыми колесами, при этом каретки образуют вращательные шарниры с нижними рычагами, а между верхними рычагами и платформой установлены шатуны посредством вращательных шарниров. Геометрические оси шарниров пересекаются в центре вращательного шарнира между вилкой и платформой, а стержень сопряжен с круговой направляющей посредством поступательного шарнира. Нижний и верхний рычаги выполнены плоскими. Достигается расширение области применения. 1 ил.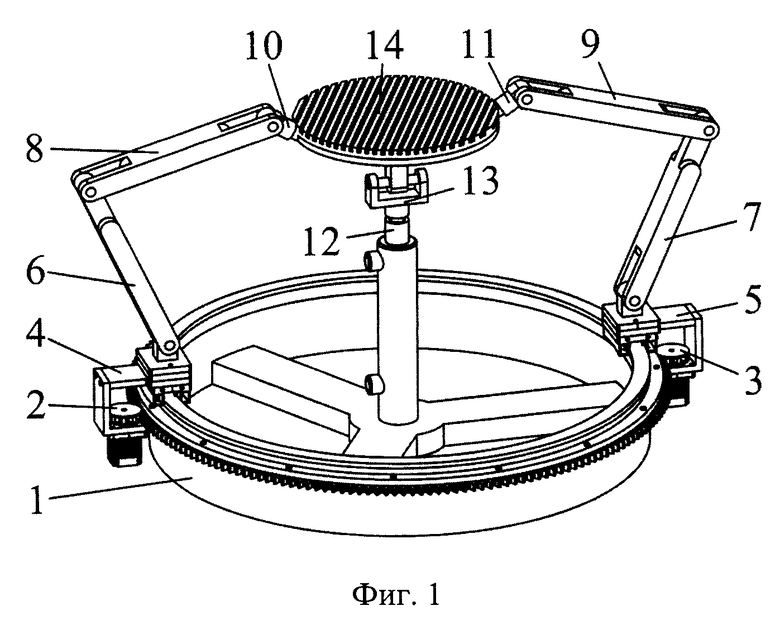
Двухподвижный реконфигурируемый сферический механизм с круговой направляющей, включающий стойку и платформу, между которыми установлены три кинематические цепи, две из которых включают нижние и верхние рычаги, а третья цепь состоит из стержня и вилки, отличающийся тем, что стойка выполнена в виде круговой направляющей с нарезанными на ней зубьями, на которой размещены каретки с зубчатыми колесами, при этом каретки образуют вращательные шарниры с нижними рычагами, а между верхними рычагами и платформой установлены шатуны посредством вращательных шарниров, геометрические оси которых пересекаются в центре вращательного шарнира между вилкой и платформой, а стержень сопряжен с круговой направляющей посредством поступательного шарнира, при этом нижний и верхний рычаги выполнены плоскими.
| US 5893296 A1, 13.04.1999 | |||
| Способ изготовления инструментального материала | 1955 |
|
SU111896A1 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| Пространственный механизм | 1991 |
|
SU1779576A1 |
| US 6729202 B2, 04.05.2004. | |||

