Изобретение относится к механическим системам параллельной структуры, применяемым в технике для получения заданного движения выходного звена.
Известен трехподвижный манипулятор параллельной структуры «Дельта-робот» [Vischer P., Clavel R. Kinematic calibration of the parallel Delta robot. Robotica, 16(2), pp.207-218, 1998; Fig. 1]. Манипулятор включает в свой состав неподвижное звено (стойку) и выходное звено (платформу), между которыми установлено три кинематические цепи, каждая из которых снабжена приводом. Недостатком данного манипулятора является отсутствие вращательных степеней свободы выходного звена.
Наиболее близким к предлагаемому манипулятору является четырехподвижное устройство для перемещения и позиционирования элементов в пространстве [Clavel, R. Device for displacing and positioning an element in space, WIPO Patent, WO 87/03528, Date de depot: 10.12.86, Date de publication internationale: 18.06.87]. Устройство имеет параллельную структуру и включает неподвижное звено (стойку) и платформу, между которыми установлены кинематические цепи, состоящие из ведущих звеньев (рычагов) и штанг и расположенные по периметру, а также центральная кинематическая цепь, состоящая из вилки, кулисы, камня и выходного элемента. Все шарниры устройства выполнены вращательными, кроме шарниров вилка-кулиса и камень-выходной элемент, выполненных карданными, а также шарнира кулиса-камень, выполненного поступательным. При этом между каждым рычагом и платформой установлено по две штанги, а число кинематических цепей, расположенных по периметру, равно трем. Штанги образуют с сопрягаемыми звеньями двухподвижные шарниры. Таким образом, цепи, расположенные по периметру, обеспечивают выходному элементу три поступательные степени свободы, а центральная - одну вращательную относительно оси, перпендикулярной плоскости платформы.
Данное устройство принимается за прототип предлагаемого манипулятора. Недостаток прототипа заключается в отсутствии вращательных степеней свободы выходного элемента относительно осей, расположенных в плоскости платформы. Данный недостаток ограничивает возможности применения прототипа в технике.
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем обеспечения выходному элементу дополнительной вращательной степени свободы относительно оси, расположенной в плоскости платформы.
Данная проблема решается тем, что в предлагаемом пространственном манипуляторе параллельной структуры с пятью степенями свободы, включающем стойку, платформу и кинематические цепи, состоящие из ведущих звеньев и штанг и расположенные по периметру, а также кинематическую цепь, состоящую из вилки, кулисы, камня и выходного элемента и расположенную по центру, согласно изобретению, в кинематических цепях, расположенных по периметру, ведущие звенья выполнены в виде трехпарных и двухпарных ползунов, сопряженных со штангами сферическими шарнирами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей, расположенных по периметру, равно четырем, причем стойка выполнена в виде верхней и нижней неподвижных плит, между которыми установлены направляющие, сопряженные с ползунами.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении выходному элементу дополнительной вращательной степени свободы относительно оси, расположенной в плоскости платформы. Данное преимущество способствует расширению возможностей практического применения предлагаемого манипулятора.
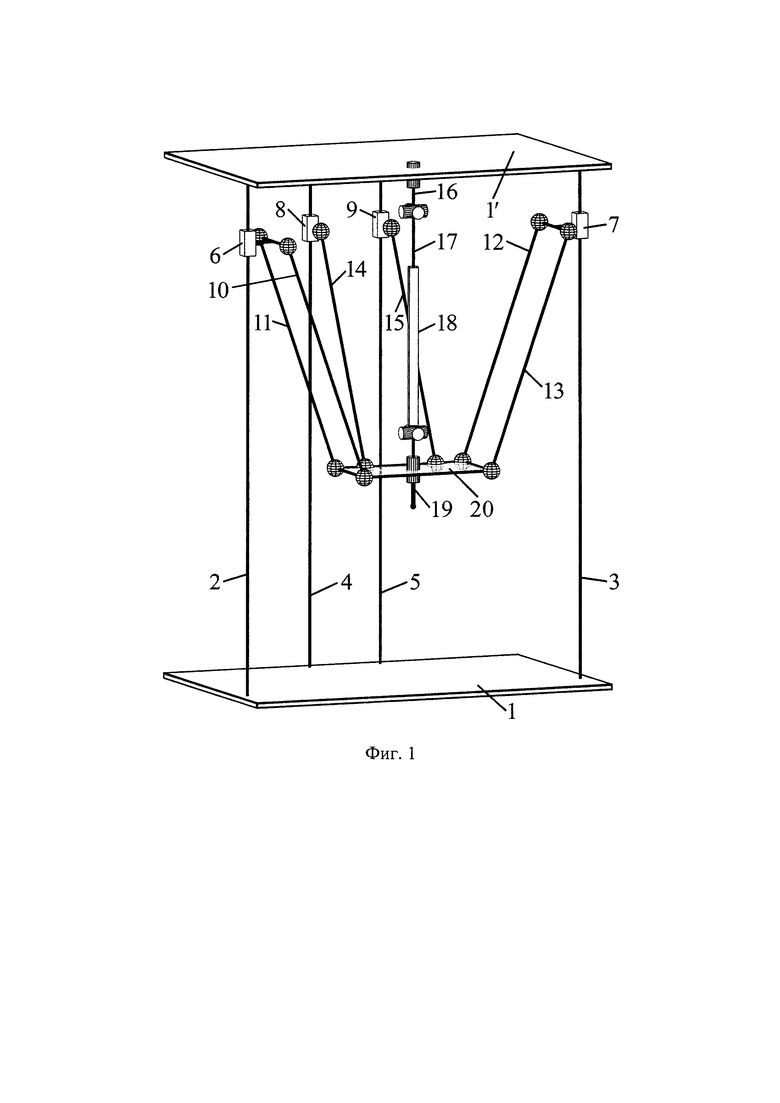
Изобретение поясняется чертежом, где на фиг. 1 показана кинематическая схема пространственного манипулятора параллельной структуры с пятью степенями свободы. Манипулятор включает нижнюю неподвижную плиту 1 и верхнюю неподвижную плиту Г, между которыми установлены платформа 20 и пять кинематических цепей, из которых четыре расположены по периметру и одна по центру. Цепи, расположенные по периметру, выполнены двух типов. Первые состоят из направляющих 2 и 3, жестко установленных между нижней неподвижной плитой 1 и верхней неподвижной плитой 1', трехпарных (образующих с сопрягаемыми звеньями три кинематические пары) ползунов 6 и 7, а также штанг 10, 11, 12 и 13. Вторые состоят из направляющих 4 и 5, жестко установленных между нижней неподвижной плитой 1 и верхней неподвижной плитой 1', двухпарных (образующих с сопрягаемыми звеньями две кинематические пары) ползунов 8 и 9, а также штанг 14 и 15. Центральная цепь устанавливается между верхней неподвижной плитой 1' и платформой 20 и включает вилку 16, кулису 17, камень 18 и выходной элемент 19. Ползуны 6, 7, 8 и 9, а также вилка 16 являются приводными, которым задаются входные движения. Звенья 2 и 6; 3 и 7; 4 и 8; 5 и 9; 17 и18 образуют поступательные шарниры. Звенья 10, 11, 12 и 13 образуют сферические шарниры со звеньями 6, 7, 8, 9 и 20. Звенья 1' и 16; 19 и 20 образуют вращательные шарниры. Звенья 16 и 17; 18 и 19 образуют карданные шарниры.
Принцип работы предлагаемого манипулятора заключается в следующем. При смещении трехпарных и двухпарных ползунов 6, 7, 8 и 9 относительно направляющих 2, 3, 4 и 5, жестко установленных между нижней неподвижной плитой 1 и верхней неподвижной плитой 1', движение передается на штанги 10, 11, 12, 13, 14 и 15 и далее на платформу 20. Так обеспечиваются четыре степени свободы платформе 20 (три линейных смещения и поворот относительно оси, параллельной оси между сферическими шарнирами 10-20 и 11-20). Пятая степень свободы (поворот вокруг оси, перпендикулярной плоскости платформы 20) обеспечивается за счет центральной цепи. В ней при вращении вилки 16 движение передается на кулису 17 и далее на камень 18, который приводит в движение выходной элемент 19.
Предлагаемый манипулятор может быть применен в процессах по обработке элементов деталей машин, а также применениях, требующих пяти степеней свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ДЛЯ ШЛИФОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2023 |
|
RU2799610C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| ЧЕТЫРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2023 |
|
RU2811198C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
Изобретение относится к области машиностроения, а более конкретно к механическим системам параллельной структуры. Пространственный манипулятор параллельной структуры с пятью степенями свободы включает стойку, платформу и кинематические цепи, состоящие из ведущих звеньев и штанг и расположенные по периметру, кроме того, включает расположенную по центру кинематическую цепь, состоящую из вилки, кулисы, камня и выходного элемента. В манипуляторе в кинематических цепях, расположенных по периметру, ведущие звенья выполнены в виде трехпарных и двухпарных ползунов, сопряженных со штангами сферическими шарнирами. Между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей, расположенных по периметру, равно четырем. Стойка выполнена в виде верхней и нижней неподвижных плит, между которыми установлены направляющие, сопряженные с ползунами. Достигается расширение области применения. 1 ил.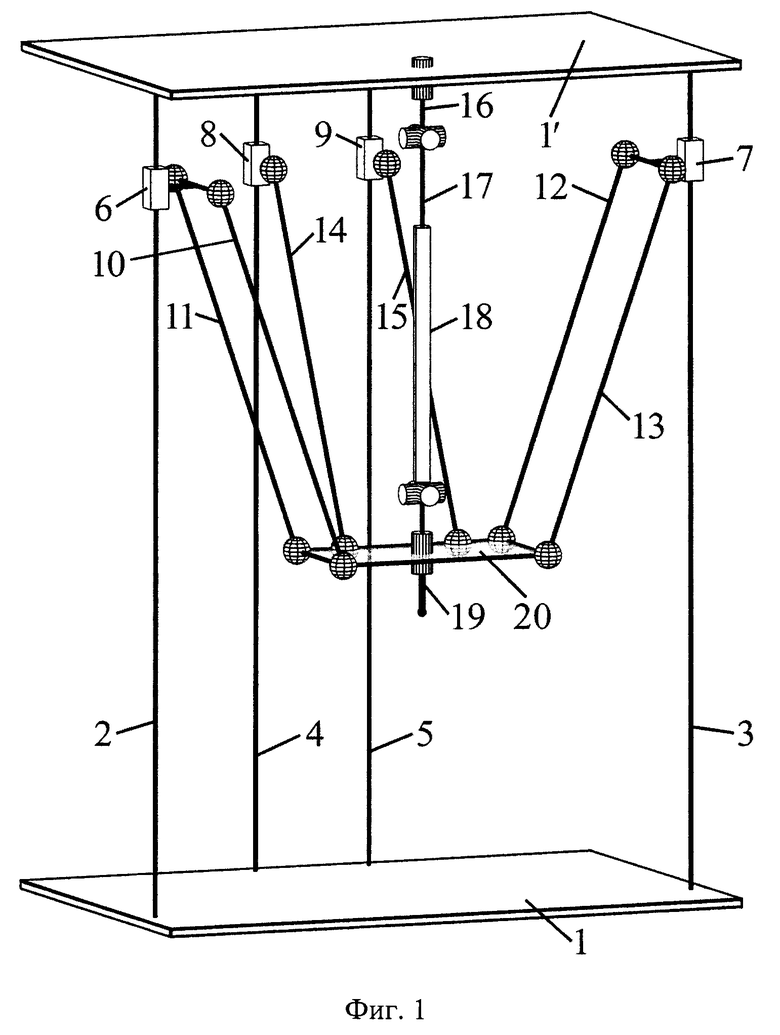
Пространственный манипулятор параллельной структуры с пятью степенями свободы, включающий стойку, платформу и кинематические цепи, состоящие из ведущих звеньев и штанг и расположенные по периметру, а также кинематическую цепь, состоящую из вилки, кулисы, камня и выходного элемента и расположенную по центру, отличающийся тем, что в кинематических цепях, расположенных по периметру, ведущие звенья выполнены в виде трехпарных и двухпарных ползунов, сопряженных со штангами сферическими шарнирами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, а число кинематических цепей, расположенных по периметру, равно четырем, причем стойка выполнена в виде верхней и нижней неподвижных плит, между которыми установлены направляющие, сопряженные с ползунами.
| Механизм для вертикального перемещения | 1982 |
|
SU1100449A1 |
| US 4976582 А1, 06.09.1990 | |||
| US 5893296 A1, 13.04.1999 | |||
| Пространственный механизм | 1991 |
|
SU1779576A1 |
| US 6729202 B2, 04.05.2004. | |||

