Изобретение относится к авиационной технике, и в частности к системам управления вертолетом.
В настоящее время большинство пилотируемых типов вертолетов как с ручным управлением, так и с системами улучшения устойчивости, стабилизации параметров и режимов, а также с системами автоматического управления выполнены с механической проводкой управления.
Структурно схема системы управления вертолета с ручным управлением выглядит следующим образом: в кабине вертолета установлены органы управления циклическим и общим шагом, а также органы путевого управления, которые кинематически, посредством тяг и качалок, связаны с гидроусилителями (бустерами).
Недостатком вертолетов с механической проводкой системы управления является то, что для обеспечения безопасности на случай отказа механическую проводку и КАУ сложно дублировать и практически невозможно резервировать дважды и трижды. При доводке вертолета в процессе летных испытаний смена любых технических характеристик системы управления влечет за собой большую переделку всей механической проводки или КАУ.
Невозможность в критической ситуации парировать ошибочные или намеренно, имеющие катастрофические последствия действия пилота, то есть невозможно выключить пилота из контура управления.
Невозможно обеспечить имитацию различных типов вертолетов для учебных целей, так как очень сложно менять передаточные коэффициенты в механической проводке и тем более обеспечивать нелинейный закон управления.
В вертолетах с системами улучшения устойчивости и стабилизации (система автопилот) к обычной механической системе ручного управления добавлены: электронный вычислитель с набором датчиков в зависимости от потребных задач, а также обычные гидроусилители заменены на комбинированные агрегаты управления (КАУ), в конструкции которых помимо того, что имеется механический золотник, управляемый непосредственно от органов управления, имеется электрогидравлический усилитель (ЭГУ), который управляется от электронного вычислителя автопилота в 20% диапазоне от рабочего хода штока КАУ.
Для обеспечения безопасности при отказе автопилота управление от него выполняют не более чем в 20% диапазоне, а также на случай отказа, все органы управления имеют на 20% больший диапазон хода, для того чтобы летчик имел возможность парировать ложную команду автопилота.
В вертолетах с системами автоматического управления (САУ) необходимо, чтобы управление вертолетом осуществлялось в 100% диапазоне как от органов управления, так и от команд САУ, так как вертолет с такой системой должен длительное время лететь по заданному маршруту с выполнением различных заложенных с память маневров.
К описанной системе управления можно отнести комплекс бортового оборудования управления полетом вертолета, содержащий систему датчиков параметров полета и интегрированную систему радионавигации и радиосвязи, параллельно соединенные с системой индикации и вычислителем директорного управления, который связан с системой индикации, четырехканальный автопилот, имеющий последовательные рулевые машины с ограниченным ходом, соединенный на входе с системой датчиков параметров полета и на выходе - с комбинированным агрегатом управления системы управления вертолетом (Б.М.Валишев и С.Д.Аристов. МИ-172 - шаг в будущее. - Ж. "Вертолет", 4 (7), г.Казань, 1999).
Данный аналог принят за прототип.
Для достижения требуемого уровня безопасности нужно продублировать (а иногда трижды или четырежды резервировать) все системы, датчики и агрегаты САУ, так как полет в автоматическом режиме может выполняться в полном отсутствии видимости и отказ системы летчик может не заметить или поздно заметить. В этих системах при полете в ручном режиме перемещение органа управления летчиком передается посредством тяг и качалок на КАУ, обеспечивая прямое управление. В случае, если включена система улучшения устойчивости, то вычислитель, получая сигналы от датчиков, может подавать сигналы на ЭГУ КАУ и тогда движения штока КАУ будут являться суммой движений от механической проводки и от электронного усилителя. Обычно в режиме улучшения устойчивости сигнал от электронного вычислителя не превышает 20% диапазона.
В режиме автоматического управления все управление осуществляет система САУ, для этого необходим полный диапазон штоков КАУ, одним из традиционных способов сегодня является установка в цепи механической проводки рулевой машинки, объединяющей в себе электромагнитный тормоз, загрузочный механизм и электрический привод. Основная задача этого агрегата передвигать орган управления без участия летчика по командам (САУ) для обеспечения согласования положения органа управления с положением штока КАУ.
Невозможно исключить все перекрестные связи в каналах управления.
Настоящее изобретение направлено на решение технической задачи по созданию комбинированой системы управления, включающей механическую часть с органами управления и электрический блок управления исполнительными узлами, как минимум дважды резервированный как по цифровой части, так и по аналоговой части.
Достигаемый при этом технический результат заключается в повышении надежности системы и безопасности полетов.
Указанный технический результат достигается тем, что в системе управления вертолетом, содержащей в каждом канале управления орган управления, кинематически связанный с датчиком его положения, электрически связанным с электронным вычислителем, к которому подключена бортовая информационная система контроля и который по аналоговому выходу связан с электродистанционными рулевыми приводами, а также датчики параметров полета, выходы которого подключены к указанному вычислителю, датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой части и по аналоговой части выполнены минимум двукратно резервированными и с функцией формирования и обработки сигналов одновременно во всех резервированных каналах.
Указанные признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого результата.
На чертеже показана блок-схема системы управления вертолетом.
Согласно настоящего изобретения система управления вертолетом содержит в каждом канале управления орган управления, кинематически связанный с датчиком его положения, электрически связанным с электронным вычислителем, к которому подключена бортовая информационная система контроля и который по аналоговому выходу связан с электродистанционными рулевыми приводами, а также датчики параметров полета, выходы которого подключены к указанному вычислителю. При этом для повышения эксплуатационной надежности управления и безопасности полетов датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой части и по аналоговой части выполнены минимум двукратно резервированными и с функцией формирования и обработки сигналов одновременно во всех резервированных каналах.
Настоящее изобретение касается вертолета, у которого к традиционным органам управления 1 вместо тяг и качалок подключены более чем дважды (предпочтительно, четырежды) резервированные датчики положения 2, которые электрически соединены с минимум двукратно (предпочтительно, четырехкратно) резервированным по цифровой части и минимум двукратно (предпочтительно, четырежды) по аналоговой электронным вычислителем 3, а тот, в свою очередь, электрически соединен с электродистанционными рулевыми приводами 4, а также с датчиками 5 параметров полета и с бортовой информационной системой контроля 6 (БИСК) (см. чертеж).
Система управления вертолетом работает следующим образом. Перемещение органа управления 1 передается на резервированный датчик положения 2, который передает электросигнал в электронный вычислитель 3, в котором этот сигнал обрабатывается и суммируется с сигналами от датчиков 5 вертолета и сигналом, выработанным самим электронным вычислителем 3 для парирования перекрестных связей, и такой суммированный сигнал идет на электрогидравлический усилитель электродистанционного рулевого привода 4. Аналогичный алгоритм выполняется во всех каналах управления и одновременно во всех четырех резервах по каждому каналу управления.
Можно рассмотреть пример исполнения системы управления, в которой к традиционным органам управления вместо тяг и качалок подключены четырежды резервированные датчики положения 2, которые электрически соединены с четырехкратно резервированным по цифровой части и четырежды по аналоговой электронным вычислителем 3, а тот, в свою очередь, электрически соединен с электродистанционными рулевыми приводами 4, а также с датчиками и с бортовой информационной системой контроля (БИСК) 6. К органам путевого управления и управления циклическим шагом помимо датчиков положения кинематически, посредством пружинного загрузочного механизма, подсоединен механизм 7, фиксирующий нейтральное положение органа управления 1. Этот механизм работает по принципу электромагнитного тормоза или по принципу электрического привода, эти функции могут быть объединены в один механизм, и который в ручном режиме управления задействуется летчиком, а в режиме автоматического управления - электронным вычислителем ЭДСУ. К рычагу управления общим шагом помимо датчика положения, без пружинного загрузочного механизма, кинематически подсоединен механизм фиксирования положения рычага при отпускании его летчиком, который в системе только с ручным управлением может быть выполнен либо с фрикционным фиксированием, либо с фиксированием посредством зубцов, либо электромагнитного типа, либо посредством гидравлического тормоза, а в системе с автоматическим управлением механизм, фиксирующий положение, выполнен по принципу электрического привода с электромагнитной муфтой. В режиме ручного управления механизмом управляет летчик, а в режиме автоматического управления - электронный вычислитель ЭДСУ.
Система работает следующим образом. Перемещение органа управления передается на резервированный датчик положения, который передает электрический сигнал в электронный вычислитель, далее в нем сигнал обрабатывается и суммируется с сигналами от датчиков вертолета и сигналом, выработанным самим электронным блоком для парирования перекрестных связей, и такой суммированный сигнал идет на электрогидравлический усилитель электродистанционного рулевого привода. Аналогичный алгоритм выполняется во всех каналах управления и одновременно во всех четырех резервах при исправной работе всех резервов системы. При отказах резервов кратность резервирования понижается, но оставшиеся исправные продолжают работать, обеспечивая управление вертолетом.
В данной системе резервирование может быть выполнено посредством установки нескольких нерезервированных датчиков или резервированных дважды, каждый из которых кинематически подсоединен к органу управления, тем самым исключаются общие нерезервированные элементы датчиков. Аналогично может быть выполнен и вычислитель ЭДСУ в виде двух двукратно резервированных блоков.
Для улучшения помехозащищенности системы и снижения ее массы, вышеописанная система может быть выполнена с оптическими каналами связи между всеми электрическими элементами системы. Для этого каждый электрический элемент системы дополняется электрооптическим преобразователем, который преобразует все управляющие и информационные электрические сигналы в оптические, в этом случае электрические линии связи между элементами системы заменяются на оптоволоконные. Такое техническое решение сегодня используется во всех системах передачи данных по оптическим каналам.
Настоящее изобретение промышленно применимо, так как может быть реализовано с использованием известных узлов и блоков, которые в настоящее время применяются в качестве составных узлов систем автоматического управления летательным аппаратом. Например, в качестве электронного вычислителя и бортовой информационной системой контроля могут быть применены аналогичные аппараты из системы управления летательным аппаратом, защищенной патентом RU №2204504, В 64 С 13/16, опубл. 20.05.2003. Остальные элементы являются широко используемыми в вертолетах узлами систем управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления вертолетом | 2015 |
|
RU2636245C2 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| ВЫЧИСЛИТЕЛЬ КОРРЕКТИРУЮЩИХ ФУНКЦИЙ | 2002 |
|
RU2225992C2 |
Изобретение относится к авиационной технике. Система содержит в каждом канале управления орган управления, кинематически связан с датчиком его положения, электрически связаный с электронным вычислителем, к которому подключена бортовая информационная система контроля, которая по аналоговому выходу связана с электродистанционными рулевыми приводами. Выходы датчиков параметров полета подключены к электронному вычислителю. Датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой и аналоговой части выполнены минимум двукратно резервированными с функцией формирования и обработки сигналов одновременно во всех резервированных каналах. Техническим результатом изобретения является повышение надежности управления и безопасности полета. 1 ил.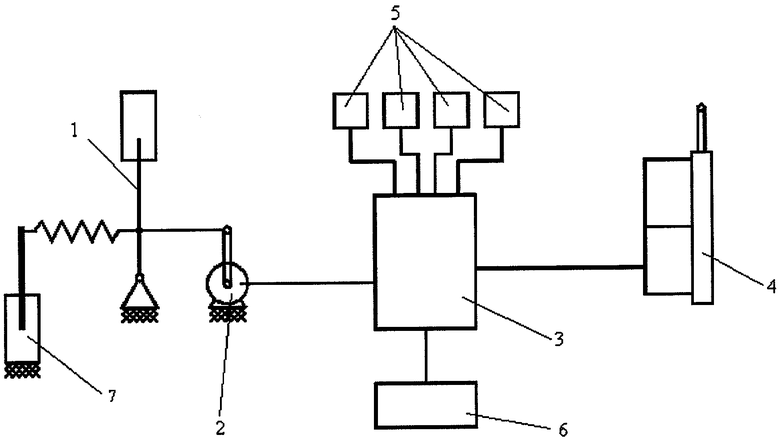
Система управления вертолетом, содержащая в каждом канале управления орган управления, кинематически связанный с датчиком его положения, электрически связанным с электронным вычислителем, к которому подключена бортовая информационная система контроля и который по аналоговому выходу связан с электродистанционными рулевыми приводами, а также датчики параметров полета, выходы которых подключены к упомянутому вычислителю, отличающаяся тем, что по крайней мере один датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой части и по аналоговой части выполнены минимум двукратно резервированными и с функцией формирования и обработки сигналов одновременно во всех резервированных каналах, при этом связи между электрическими элементами системы выполнены электрическими или оптическими с дополнением электрических элементов электрооптическими преобразователями.
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ УПРАВЛЕНИЯ ПОЛЁТОМ ВЕРТОЛЁТА | 2002 |
|
RU2220073C1 |
| US 6128554 A, 03.10.2000. | |||

