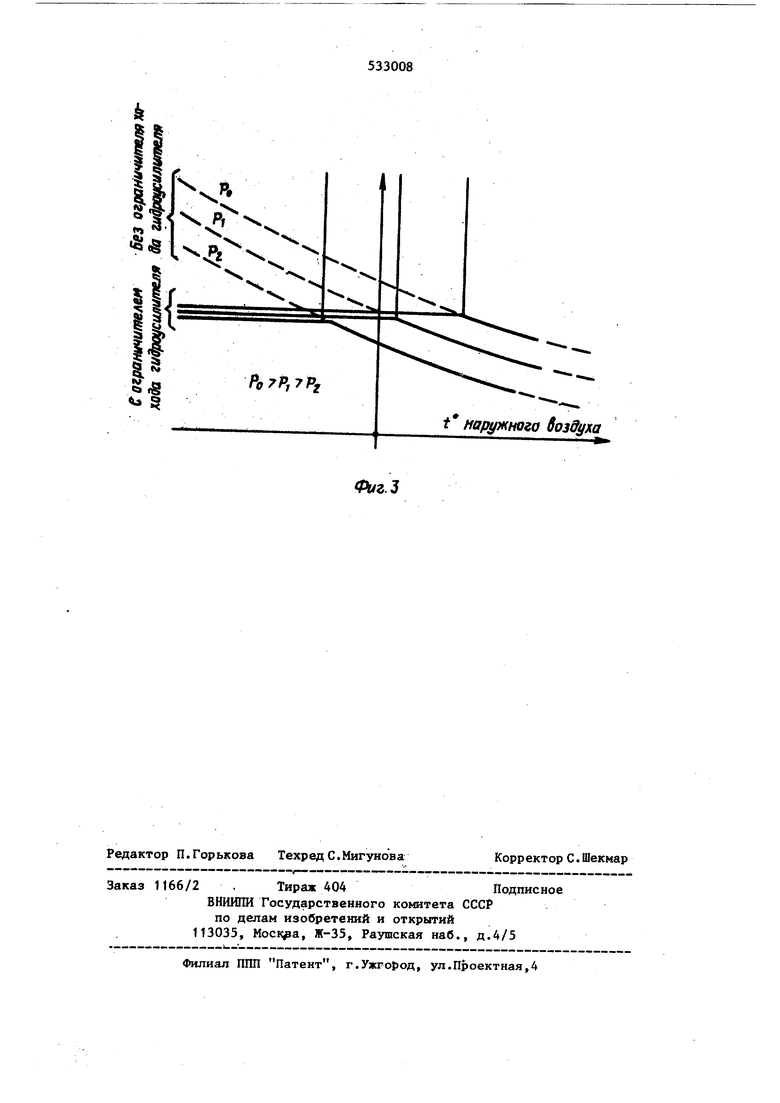
Изобретение относится к авиацион ной технике и касается систем управ ления вертолетом. Известны системы путевого управления вертолёта, содержащие педали, систему тяг и качалок, .ридроусилитель, барабан, тросовую проводку с втулочно-роликовой цепью. Известные системы обеспечивают путевое управление вертолетом путем изменения углов установки лопастей рулевого винта. Известна также система путевого управления вертолета с рулевым винтом, содержащая педали, гидроусилитель с золотником, соединенным качалкой с проводкой управления. Величина хода педалей и соответ ственно изменение угла установки лопастей рулевого винта в такой сис теме управления не ограничены в зависимости от температуры и плотности наружного воздуха. Это приводит к тому, что мощность, потребляемая рулевым винтом и передаваемая транс миссией, может измениться в значительных пределах, вызывая перегрузк рулевого винта и трансмиссии, что снижает их надежность. Целью изобретения является поБьшение надежности путем предохране ния рулевого винта и трансмиссии от перегрузок. Это достигается тем, что система .путевого управления снабжена ограни чителем хода гидроусилителя, выполненным в виде подвижного упора с электроприводом, при этом подвижный упор взаимодействует с качалкой управления золотником гидроусилителя. Перемещение подвижного упора осуществлено чер«з, систему тяг и качалок при помощи,например,электромеханизма по сигналу, поступакще му от датчика температуры и атмосферного давления через блок управления, где эти сигналы суммируются С сигналом датчика обратной связи . На фиг. 1 изображена схема путевого управления одновинтового вертолета; на фиг. 2 - зависимость углов установки рулевого винта от тем пературы наружного воздуха и атмосферного давления (Р) при использовании путевого управления без ограничителя хода .гидроусилителя и с ограничителем хода гидроусилителя; 82 на фиг. 3 - зависимость максимальной нагрузки, действующей на рулевой винт, от температуры наружного воздуха и атмосферного давления при использовании путевого управления без ограничителя хода гидроусилителя и с ограничителем хода гидроусилителя . Система путевого управления содержит педали 1, через систему тяг и качалок 2,3,4 соединенные с рычагами 5 и 6 управления золотником гидроусилителя, которые шарнирно соединены между собой. Гидроусилитель 7 соединен через качалку 8 и тягу 9 с секторо.м 10, от которого идут тросы 11, заканчивающиеся втулочно-роликовой цепью, перекинутой через звездочку хвостового редуктора 12. Ограничитель хода гидроусилителя выполнен в виде подвижного упора 13, соединенного с электроприводом 14, включенным в работу по сигналу от датчиков 15,16 температуры и атмосферного давления. Сигналы от датчиков 15 и 16 поступают в блок 17 управления, где эти сигналы суммирзпотся с сигналом от датчика 18 обратной связи. Система путевого управления работает следующим образом. При перемещении правой педали 1 вперед рычаг 5 управления золотником гидроусилителя поворачивается вокруг оси 19 и смещает золотник гидроусшштеля 7 вниз. При этом рычаг 6 поворачивается вокруг оси 20. Силовой шток гидроусилителя 7 вместе с золотниковой коробкой и рычагами 5 и 6 движется вверх. Когда рычаг 6 дойдет до подвижного упора 13, поворот рычага 5 станет невозможен и, следовательно, невозможно движение штока гидроусилителя 7 вверх. Если у гидроусилителя ось 19 подвижна (ее перемещением может управлять автопилот), то. перемещение этой точки не дает возможности переместить золотник гидроусилителя 7 в том случае, когда рычаг 6 доходит до упора. Таким образом, связь подвижного упора с гидроусилителем делает невозможным перемещение его штока как при управлении летчиком, так и при работе от автопилота.
При изменении температуры и давления наружного воздуха меняется положение штока электромеханизма 14 и связанного с ним подвижного упора 13. Сигнал к электромеханизму 14 поступает от датчикоа 16 и 15 через блок 17 управления, где эти сигналы суммируются с сигналами от датчика 18 обратной связи. Шток электромеханизма перемещается до тех пор, пока сигнал с датчика 18 не скомпенсирует сигналы с датчиков давления и температуры, просуммированные в блоке 17.
В зависимости от температуры и давления максимально возможный угол отклонения лопастей рулевого винта может изменяться в определенном диапазоне, например, в диапазоне 19-24°.
Ограниченность хода гидроусилиг я,. введенного в конструкцию путевого управления вертолета, обеспе-« чивает автоматическое изменение положения упора, ограничивающего максимальную величину угла установки
лопастей рулевого винта в зависимости от температуры давления воздуха .
На графике углов установки рулевого винта (фиг.2).в зависимости
от температуры наружного воздуха и атмосферы давления (Р, Р Р) видно, что при наличии в путевом управлении вертолета ограничителя хода гидроусилителя (утолщенные
линии графика) максимальный угол установки уменьшается при псзнижении температуры и увеличении атмосферного давления РО , Р , Р, . Благодаря этому максимальная
мощность на рулевом винте и на трансмиссии, передающей эту мощность, уменьшаете.

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПУТЕВОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА С РУЛЕВЫМ ВИНТОМ | 1983 |
|
SU1208721A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| Устройство управления курсовым положением вертолета с соосными винтами | 2021 |
|
RU2759228C1 |
| УСТАНОВКА ДУБЛИРОВАННЫХ РУЛЕВЫХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2021 |
|
RU2773301C1 |
| УСТАНОВКА РУЛЕВОГО ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2636195C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
СИСТЕМА ПУТЕВОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА С РУЛЕВЫМ ВИНТОМ, содержащая педали, гидроусилитель с золотником, соединенным- качалкой с проводкой управления, отличающаяся тем, что, с целью повышения надежности путем предохранения рулевого винта от перегрузок, система управления снабжена ограничителем хода гидроусилителя, выполненным в виде подвижного упора с электроприводом, при этом упор взаимодействует с качалкой управления золотником гидроусилителя.'^-idr"i(Лелсо сосх>&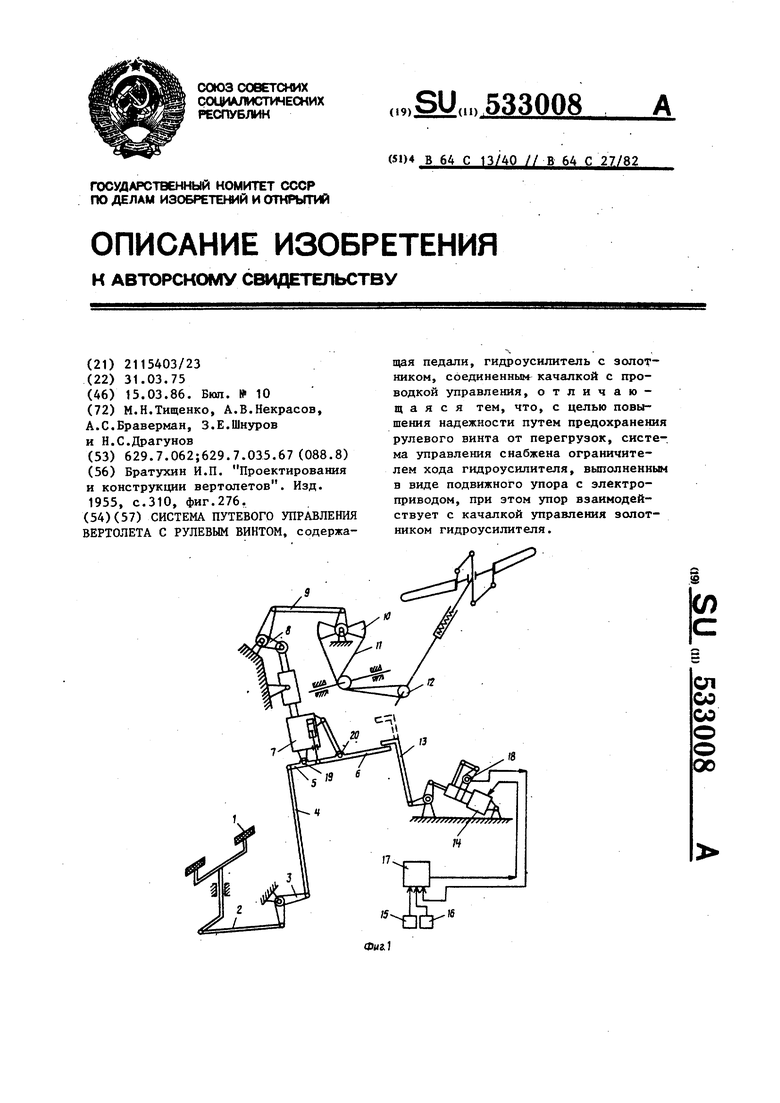
ffes орраничигпЕлр хода гидроусилителя
ф1Аг.2 t наружнозо боздуха
t наружного 8o3&i/xq
Фиг.З
| Братухин И.П | |||
| "Проектирования и конструкции вертолетов" | |||
| Изд | |||
| Двухступенное или многоступенное гидравлическое инжекционное устройство для сжатия воздуха и других газов, с применением насосов для постоянного поддержания циркуляции в нем жидкости | 1925 |
|
SU1955A1 |
