Область техники, к которой относится изобретение
Изобретение относится к области авиации, в частности к системам управления вертолетом с резервированием и может быть использовано в системе управления летательным аппаратом, преимущественно, в вертолетах с бустерным управлением.
Уровень техники
Известна система управления вертолетом (ЕР 2415669 A1, В64С 13/42, опубл. 08.02.2012 г.), которая относится, в частности, к системе управления для ввода команд пилота для вертолета с механическим входным сигналом, по меньшей мере, одним электрическим датчиком положения для указанного входного сигнала, по меньшей мере, один источник электропитания и, по меньшей мере, один управляемый электромеханический привод, питаемый по меньшей мере одним источником электропитания и управляется по меньшей мере одним электрическим датчиком положения. Механический входной сигнал подается механически на, по меньшей мере, один управляемый электромеханический привод. В конструкции предусмотрены упоры рычажного механизма, ограничивающие любой двунаправленный ход командного вала.
Известна конструкция гидропривода для системы управления летательным аппаратом (RU 1840015, В64С 13/36, опубл. 27.06.2006 г.), в которой привод содержит двухкамерный силовой гидроцилиндр, полости которого через систему канализации и распределители соединены с каналами нагнетания и слива рабочей жидкости, шариковые обратные клапаны и фильтры. Шариковые обратные клапаны смонтированы на входе каналов нагнетания. Это позволяет исключить ударную нагрузку на ручке летчика при переходе на работу от одной гидросистемы или пониженное число каналов силового управления, устраняет автоколебания шаровых затворов обратных клапанов в потоке рабочей жидкости.
Известна система управления вертолетом Ми-8 (Техническое описание, книга II, 1970 г., стр. 102-103, рис. 113), в которой управляющее движение пилота передается от органов управления таких как, ручки или педали, посредством тяг и качалок на входную точку гидроусилителей. Все гидроусилители работают по необратимой схеме и одновременно являются рулевыми приводами в автопилоте. Гидроусилитель, установленный в системе путевого управления, имеет дополнительно режим автоматической перегонки, позволяющей при автоматической стабилизации перемещать исполнительный шток в полном диапазоне его хода.
Известна система управления вертолетом, наиболее близкая к заявляемому решению (RU 2714958, опубл. 21.02.2020 г.), в которой управляющее движение пилота передается от органов ручного управления посредством тяг и качалок на входную точку трех гидроусилителей или рулевых приводов, каждый из которых обеспечивает управление в одном из каналов управления: продольном, поперечном и общим шагом. Таким образом, при перемещении пилотом ручки продольно-поперечного управления вперед или назад работает только гидроусилитель продольного управления, а при перемещении пилотом ручки продольно-поперечного управления вправо или влево работает только гидроусилитель поперечного управления. При перемещении пилотом рычага общего шага вверх или вниз работает только гидроусилитель общего шага.
В ножном управлении управляющее движение пилота передается от педалей посредством тяг и качалок на входную точку гидроусилителя, а от него движение передается через качалку и звено на сектор. От сектора идут по два троса с каждой стороны сектора, которые заканчиваются одной втулочно-роликовой цепью, перекинутой через одну звездочку хвостового редуктора.
На вертолете установлен неуправляемый стабилизатор.
Недостатками такой системы управления являются:
- система ручного управления имеет большую суммарную длину проводки в забустерной части управления и, следовательно, большую массу и меньшую жесткость в силовой части системы управления, т.к. каждый гидроусилитель обеспечивает управление только в одном канале управления;
- в проводке ножного управления два троса заканчиваются одной втулочно-роликовой цепью, перекинутой через одну звездочку хвостового редуктора, что не обеспечивает полное дублирование проводки управления и, следовательно, уменьшает безопасность полетов, так как при обрыве цепи выходит из строя вся проводка управления, не смотря на имеющиеся два троса;
- на вертолете установлен неуправляемый стабилизатор, что приводит к ухудшению балансировочных характеристик одновинтовых вертолетов, а также к снижению безопасности полетов, особенно при переходе вертолета на режимы моторного планирования и авторотации.
Раскрытие сущности изобретения
Техническая проблема, не решенная в известных устройствах, решение которой обеспечивается заявляемым изобретением, заключается в создании надежной системы управления с полным дублированием забустерной части ножного управления; при этом в системе ручного управления установлен суммирующий узел 6, который позволяет передавать управляющие движения от пилота к трем рулевым приводам в отличие от прототипа, в котором у каждого рулевого привода имеется отдельная проводка управления, что приводит к большой суммарной длине и массе общей проводки управления.
Технический результат заключается в снижении массы системы управления за счет установки в систему ручного управления суммирующего узла 6, который позволяет сократить длину проводки в забустерной части системы управления; в повышении надежности системы управления и повышении в целом безопасности полета вертолета за счет обеспечения полного дублирования забустерной части ножного управления и за счет установки управляемого стабилизатора 93.
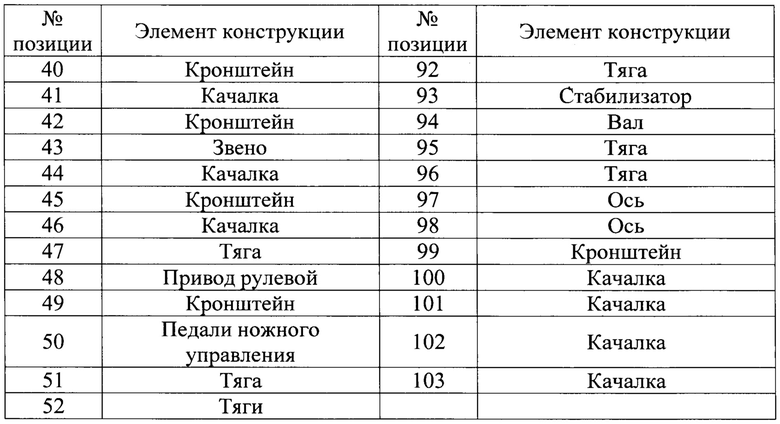
Для достижения технического результата предлагается система управления вертолетом, содержащая системы ручного и ножного управления, ручки управления 1, рычаги шаг-газ 2, педали ножного управления 50, тяги и качалки, причем, система ручного управления содержит узел суммирующий 6, который расположен на потолке грузовой кабины и состоит из кронштейна 13, на оси 97 которого установлены рычаг 14 и две качалки 15, 16, на конце рычага 14 на оси 98 установлены две качалки 17, 18, одно плечо качалки 15 соединено с плечом качалки 17 с помощью тяги 19, а одно плечо качалки 16 соединено с плечом качалки 18 с помощью тяги 20,
система ручного управления содержит две соединенные между собой с помощью вала 94 ручки управления 1, которые с помощью тяги 3, качалки 100 и тяг 4, 5 соединены с узлом суммирующим 6, внутри вала 94 расположена тяга, которая с помощью тяги 7, качалки 101 и тяг 8, 9 соединена с узлом суммирующим 6, при этом два рычага шаг-газ 2 соединены между собой тягой 95, один из рычагов шаг-газ 2 соединен с узлом суммирующим 6 с помощью тяги 10, качалки 102 и тяг 11, 12,
к узлу суммирующему 6 со стороны кабины подсоединены три тяги 5, 9, 12, с другой стороны на узле суммирующем 6 закреплена тяга 21 ко второму плечу качалки 17, а тяга 28 закреплена к третьему плечу качалки 17, тяга 22 закреплена ко второму плечу качалки 18,
узел суммирующий 6 соединен с приводами рулевыми 33, 39, 48, при этом вторые концы тяг 21, 22 присоединены соответственно к первым плечам двуплечих качалок 23, 24, установленных на кронштейне 25, ко вторым плечам качалок 23, 24 прикреплены соответственно тяги 26, 27, второй конец тяги 26 прикреплен к качалке 29, закрепленной на кронштейне 30, с другой стороны кронштейна 30 расположена качалка 31, к которой прикреплена тяга 32, второй конец тяги 32 прикреплен к входной точке привода рулевого 33, установленного на кронштейне 34, второй конец тяги 27 прикреплен к качалке 35, закрепленной на кронштейне 36, с другой стороны кронштейна 36 расположена качалка 37, к которой прикреплена тяга 38, второй конец тяги 38 прикреплен к входной точке привода рулевого 39, установленного на кронштейне 40, выходная точка привода рулевого 39 закреплена на качалке 41, установленной на кронштейне 42, на другом конце качалки 41 установлено звено 43, тяга 28 прикреплена к качалке 44, закрепленной на кронштейне 45, с другой стороны кронштейна 45 расположена качалка 46, к которой прикреплена тяга 47, второй конец тяги 47 прикреплен к входной точке привода рулевого 48, установленного на кронштейне 49, кронштейны 30, 36, 45 установлены на потолке грузовой кабины,
система ножного управления вертолетом содержит две пары педалей ножного управления 50, которые соединены между собой с помощи тяги 96 и соединены с рулевым приводом 58, к педалям ножного управления 50 подсоединена тяга 51, другой конец которой через качалку 103 соединен с одним элементом тяги 52, другой элемент которой соединен с одним концом тяги 53, второй конец которой закреплен на качалке 54, установленной на кронштейне 55, с другой стороны которого установлена качалка 56, соединенная с рулевым приводом 58 с помощью тяги 57,
рулевой привод 58 установлен на кронштейне 59, выходной шток рулевого привода 58 подсоединен к качалке 60 блока секторов 61, в котором на кронштейне 62 установлен сектор ножного управления 63, на секторе ножного управления 63 одним концом закреплены четыре троса с наконечниками 64, 65, 66, 67, при этом два троса с наконечниками 64, 66 вторым своим концом закреплены на цепи 70, проходя через ролик 68, а два других троса с наконечниками 65, 67 вторым своим концом закреплены на цепи 72, проходя через ролик 71, цепи 70 и 72 установлены на стакане звездочки 75 хвостового редуктора 76, кронштейн 55 расположен над потолком грузовой кабины в редукторном отсеке, подходящая к нему тяга 53, находится под потолком в грузовой кабине, а отходящая от него тяга 57 находится в редукторном отсеке,
в систему управления вертолетом введена система управления стабилизатором, которая содержит установленную на тарелке автомата перекоса качалку 77, которая с помощью тяги 78 связана с качалкой 79, установленной на кронштейне 80, а с другой стороны на кронштейне 80 установлена качалка 81, которая связана с сектором стабилизатора 83 с помощью тяги 82,
на секторе стабилизатора 83 одним концом закреплены два каната с наконечниками 84, 85, при этом второй конец каната с наконечником 84 проходит через ролик 86 и закреплен на одном конце цепи 88, второй конец каната с наконечником 85 проходит через ролики 73, 90 и закреплен на втором конце цепи 88 механизма управления стабилизатором 89, на котором закреплена качалка 91, соединенная со стабилизатором 93 с помощью тяги 92.
Таким образом достигается технический результат.
Достигается снижение массы системы управления, повышение ее надежности за счет того, что в системе ручного управления установлен суммирующий узел 6, применение которого позволяет сократить длину проводки в забустерной части системы управления, при этом суммирующий узел 6 позволяет передавать управляющие движения от пилота к трем рулевым приводам, которые работают таким образом, что управление общим шагом вертолета обеспечивается работой трех рулевых приводов, продольное управление обеспечивается работой двух рулевых приводов, а поперечное управление обеспечивается работой одного рулевого привода. При этом по сравнению с прототипом сократилась масса и суммарная длина общей проводки управления. Масса автомата перекоса и забустерной части системы ручного управления за счет внедрения суммирующего узла снижается на 40-50 кг.
Достигается повышении надежности системы управления за счет обеспечения дублирования забустерной части ножного управления с помощью выполнения двух независимых друг от друга цепочек ножного управления от сектора ножного управления 63 до хвостового редуктора 76.
В проводке ножного управления устанавливаются вторая цепь 72 и вторая звездочка, которая входит в состав стакана звездочки 75. При установке в ножном управлении второй цепи и второй звездочки на валу хвостового редуктора 76 появляются две независимые цепочки управления от сектора ножного управления 63 до вала хвостового редуктора 76, при этом каждая из которых состоит из троса с наконечниками 64, 65, 66, 67, соединенных с цепью 70 или 72, каждая из которых находится в зацеплении с одной из двух звездочек, входящих в состав стакана звездочки 75, расположенного на валу хвостового редуктора 76. Эти две цепочки ножного управления работают параллельно и независимо друг от друга. В случае обрыва в одной из цепочек управления система ножного управления вертолета продолжит работать в прежнем режиме. Кроме того, в системе управления вертолета установлен управляемый стабилизатор 93.
Краткое описание чертежей
Сущность предлагаемого изобретения поясняется чертежами:
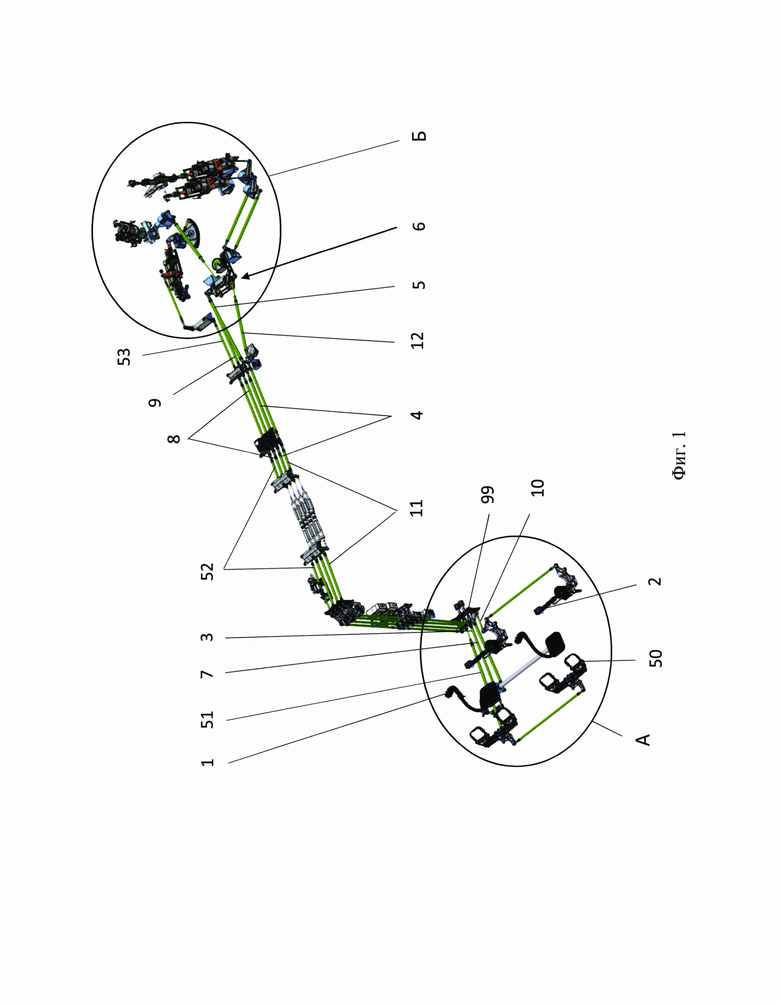
фиг. 1 - система управления вертолетом, общий вид;
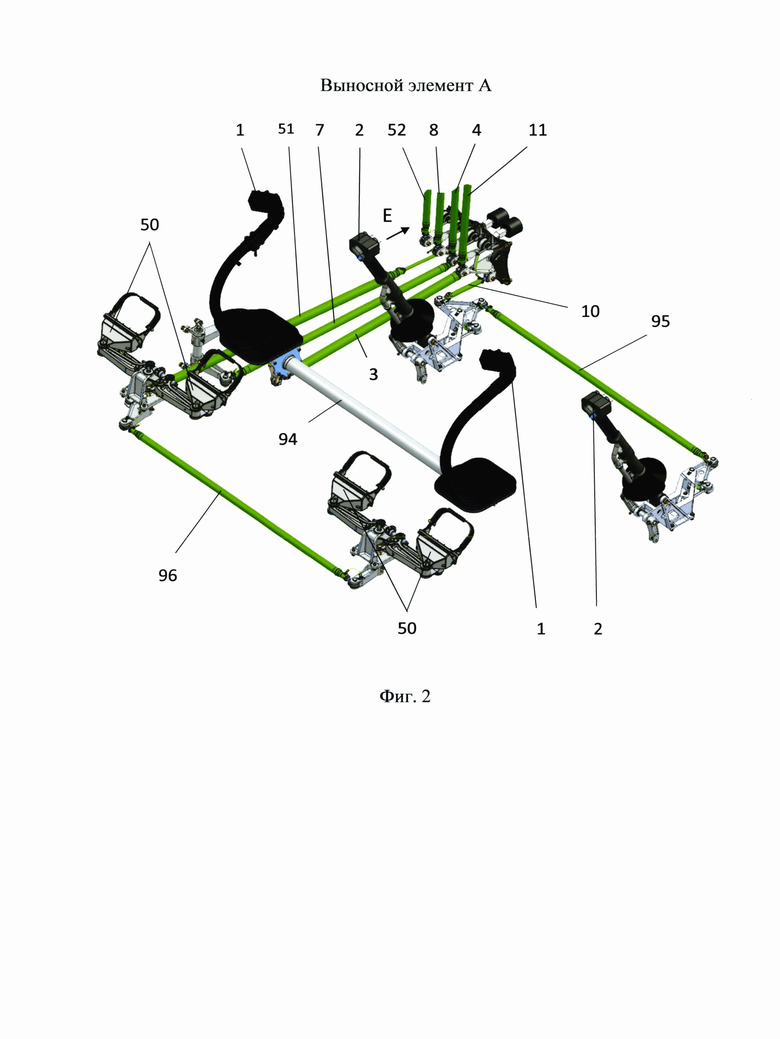
фиг. 2 - выносной элемент А на фиг. 1;
фиг. 3 - вид Е на фиг.2;
фиг. 4 - выносной элемент Б на фиг. 1;
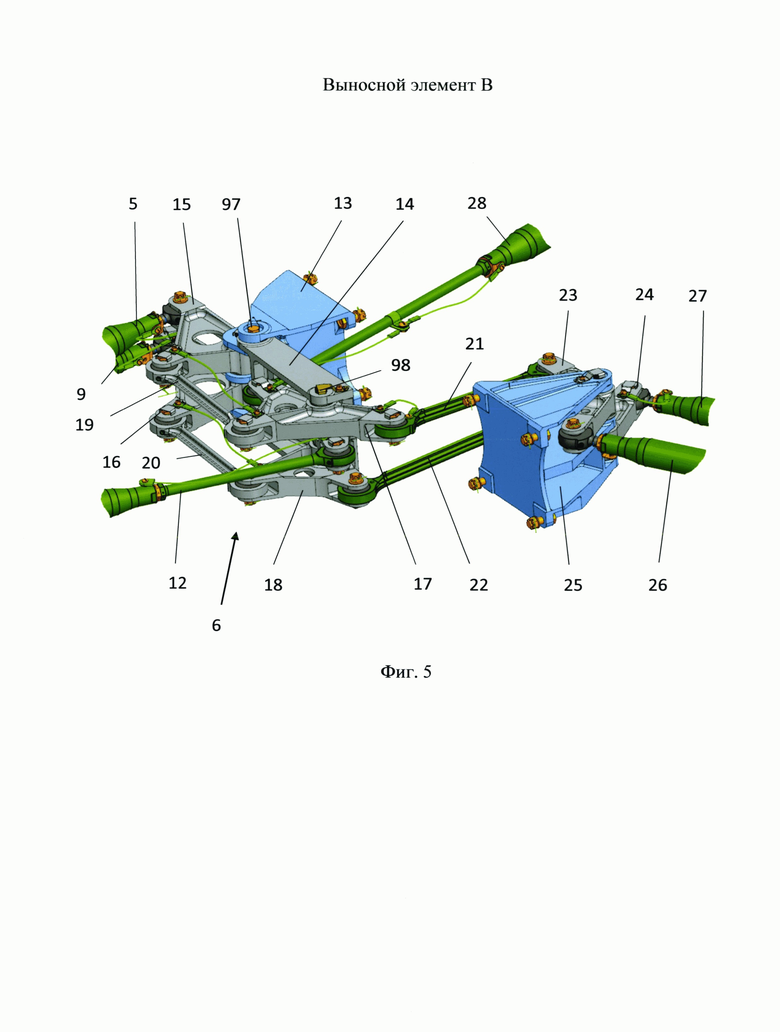
фиг. 5 - выносной элемент В на фиг. 2;
фиг. 6 - установка рулевых приводов в системе ручного управления;
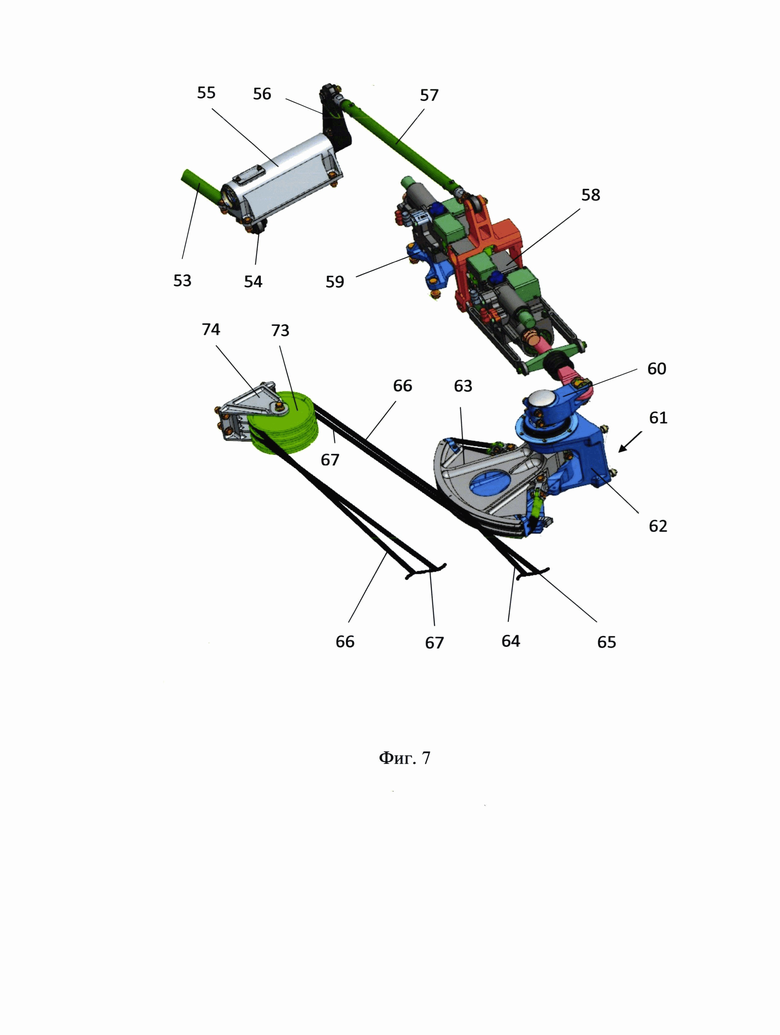
фиг. 7 - вид на рулевой привод ножного управления, сектор ножного управления и ролик;
фиг. 8 - хвостовой редуктор, общий вид;
фиг. 9 - система управления стабилизатором, общий вид;
фиг. 10 - выносной элемент Г на фиг. 8;
фиг. 11 - выносной элемент Д на фиг. 8.
Пояснения к чертежам:

Осуществление изобретения
Система управления вертолетом состоит из системы ручного управления, системы ножного управления и системы управления стабилизатором, включая органы управления этими системами.
Система ручного управления вертолетом состоит из системы продольного управления, системы поперечного управления и системы управления общим шагом. У систем продольного и поперечного управлений существует общие органы управления, а именно: две ручки управления 1, расположенные перед правым и левым пилотами и соединенные между собой валом 94, который участвует в работе продольного управления, и тягой (не показана), расположенной внутри вала 94, которая участвует в работе поперечного управления. Любой из пилотов, перемещая одну из ручек управления 1 вдоль продольной оси вертолета, осуществляет управление вертолетом в продольном направлении, а, перемещая ручку управления 1 вдоль поперечной оси вертолета, осуществляет управление вертолетом в поперечном направлении. У системы управления общим шагом органами управления являются два рычага шаг-газ 2, расположенные с левой стороны от кресел пилотов. При этом кресла пилотов размещены в кабине рядом друг с другом, вдоль поперечной оси вертолета.
Две ручки управления 1 соединены между собой с помощью вала 94, внутри которого проходит тяга (не показана). Два рычага шаг-газ 2 соединены между собой тягой 95. Две пары педалей ножного управления 50 соединены между собой тягой 96 (фиг. 2).
В системе управления на кронштейне 99, который закреплен на фюзеляже, установлены качалки 100, 101, 102, 103, предназначенные для использования в системах управления продольного управления, поперечного управления, управления общим шагом и ножного управления соответственно (фиг. 3).
Система продольного управления состоит из двух ручек управления 1, соединенных между собой валом 94, к которым одним концом подсоединена тяга 3, другой конец которой через качалку 100 соединен с одним элементом тяги 4, другой элемент которой соединен с одним концом тяги 5, другой конец которой закреплен на суммирующем узле 6 (фиг. 1, 2, 3, 4, 5).
Система поперечного управления состоит из двух ручек управления 1, соединенных между собой тягой (не показана), расположенной внутри вала 94, к которым одним концом подсоединена тяга 7, другой конец которой через качалку 101 соединен с одним элементом тяги 8, другой элемент которой соединен с одним концом тяги 9, другой конец которой закреплен на суммирующем узле 6 (фиг. 1, 2, 3, 4, 5).
Система управления общим шагом состоит из двух рычагов шаг-газ 2, соединенных между собой тягой 95, к которым одним концом подсоединена тяга 10, другой конец которой через качалку 102 соединен с одним элементом тяги 11, другой элемент которой соединен с одним концом тяги 12, другой конец которой закреплен на суммирующем узле 6 (фиг. 1, 2, 3, 4, 5).
Система ручного управления включает в себя суммирующий узел 6, который расположен на потолке грузовой кабины и состоит из кронштейна 13, на оси 97 которого расположены рычаг 14 и две двуплечие качалки 15, 16, на конце рычага 14 расположена ось 98, на которой установлены трехплечая качалка 17 и двуплечая качалка 18, одно плечо качалки 15 соединено с плечом качалки 17 с помощью тяги 19, а одно плечо качалки 16 соединено с плечом качалки 18 с помощью тяги 20 (фиг. 5). В суммирующем узле 6 установлены четыре качалки 15, 16, 17, 18, при этом качалка 17 выполнена трехплечей, что позволяет принять управляющее движение от тяги 19 и затем передать управляющее движение на две тяги 21, 28. Все остальные качалки в системе управления вертолетом являются двуплечими.
Суммирующий узел 6 предназначен для преобразования величины перемещений органов управления пилота в системах продольного, поперечного управлений и управления общим шагом в требуемые величины перемещений выходных штоков приводов рулевых 33, 39, 48 (фиг. 4, 6).
В цепочку продольного управления входит качалка 15, к одному плечу которой подсоединена тяга 5, а к другому плечу присоединена тяга 19, которая другим концом подсоединена к одному из трех плеч качалки 17.
В цепочку поперечного управления входит качалка 16, к одному плечу которой подсоединена тяга 9, а к другому плечу присоединена тяга 20, которая другим концом подсоединена к одному из двух плеч качалки 18.
В цепочку управления общим шагом входит рычаг 14, на оси 98 которого установлены качалка 18 и трехплечая качалка 17, и к которому подсоединена тяга 12.
Таким образом, к суммирующему узлу 6 со стороны пилота подсоединены тяга 5, участвующая в работе продольного управления, тяга 9, участвующая в работе поперечного управления, и тяга 12, участвующая в работе управления общим шагом. Суммирующий узел 6 соединен с приводами рулевыми 33, 39, 48 с помощью системы тяг и качалок. При этом с другой стороны суммирующего узла 6 ко второму плечу трехплечей качалки 17 подсоединена тяга 21, к третьему плечу трехплечей качалки 17 подсоединена тяга 28, а ко второму плечу качалки 18 подсоединена тяга 22. Тяги 21 и 28 участвуют в работе продольного управления и управления общим шагом, а тяга 22 участвует в работе поперечного управления и управления общим шагом.
Вторые концы тяг 21 и 22 присоединены соответственно к первым плечам двуплечих качалок 23 и 24, установленных на кронштейне 25, ко вторым плечам качалок 23 и 24 прикреплены соответственно тяги 26 и 27 (фиг. 5). Второй конец тяги 26 прикреплен к качалке 29, закрепленной на кронштейне 30. С другой стороны кронштейна 30 расположена качалка 31, к которой прикреплена тяга 32. Второй конец тяги 32 прикреплен к входной точке привода рулевого 33, установленного на кронштейне 34. Второй конец тяги 27 прикреплен к качалке 35, закрепленной на кронштейне 36. С другой стороны кронштейна 36 расположена качалка 37, к которой прикреплена тяга 38. Второй конец тяги 38 прикреплен к входной точке привода рулевого 39, установленного на кронштейне 40.
Выходная точка привода рулевого 39 закреплена на качалке 41, установленной на кронштейне 42, на другом конце качалки 41 установлено звено 43. Тяга 28 прикреплена к качалке 44, закрепленной на кронштейне 45. С другой стороны кронштейна 45 расположена качалка 46, к которой прикреплена тяга 47. Второй конец тяги 47 прикреплен к входной точке привода рулевого 48, установленного на кронштейне 49 (фиг. 6).
Кронштейны 30, 36, 45 расположены на потолке грузовой кабины, подходящие к ним тяги 26, 27, 28 находятся под потолком, а отходящие от них тяги 32, 38, 47 находятся в редукторном отсеке. Кронштейны 30, 36, 45 обеспечивают передачу управляющих движений пилота в системе ручного управления сквозь потолок грузовой кабины, сохраняя при этом герметичность грузовой кабины от редукторного отсека.
Система ножного управления вертолетом состоит из двух пар педалей ножного управления 50, расположенных на полу перед каждым из пилотов, соединенных между собой тягой 96, и связанных с рулевым приводом 58 с помощью системы тяг и качалок. К педалям ножного управления 50 последовательно подсоединены тяги 51, 52, 53, при этом одним концом к педалям ножного управления 50 подсоединена тяга 51, другой конец которой через качалку 103 соединен с одним элементом тяги 52, другой элемент которой соединен с одним концом тяги 53, второй конец которой закреплен на качалке 54, установленной на кронштейне 55 (фиг. 1, 2, 3, 4, 7). С другой стороны кронштейна 55 установлена качалка 56, к которой подсоединена тяга 57. Второй конец тяги 57 прикреплен к входной точке рулевого привода 58, установленного на кронштейне 59. Выходной шток рулевого привода 58 подсоединен к качалке 60 блока секторов 61, в котором на кронштейне 62 установлен сектор ножного управления 63 (фиг. 7).
На секторе ножного управления 63 одним концом закреплены четыре троса с наконечниками 64, 65, 66, 67. Второй конец троса с наконечником 64 проходит через ролик 68, установленный на кронштейне 69, и закреплен на верхнем конце цепи 70. Второй конец троса с наконечником 65 проходит через ролик 71, установленный на кронштейне 69, и закреплен на верхнем конце цепи 72. Второй конец троса с наконечником 66 проходит через ролик 73, установленный на кронштейне 74, далее проходит через ролик 68, установленный на кронштейне 69, и закреплен на нижнем конце цепи 70. Второй конец троса с наконечником 67 проходит через ролик 73, установленный на кронштейне 74, далее проходит через ролик 71, который установлен на кронштейне 69, и закреплен на нижнем конце цепи 72. При этом цепи 70, 72 установлены на стакане звездочки 75 хвостового редуктора 76 (фиг. 7, 8).
Кронштейн 55 расположен над потолком грузовой кабины в редукторном отсеке, подходящая к нему тяга 53, находится под потолком в грузовой кабине, а отходящая от него тяга 57 находится в редукторном отсеке. Таким образом, кронштейн 55 обеспечивает передачу управляющих движений пилота в системе ножного управления сквозь потолок грузовой кабины, сохраняя при этом герметичность грузовой кабины от редукторного отсека.
Система управления стабилизатором состоит из качалки 77, установленной на тарелке автомата перекоса (не показан), на которой закреплена тяга 78 (фиг. 10). Второй конец тяги 78 закреплен на качалке 79, установленной на кронштейне 80. С другой стороны кронштейна 80 установлена качалка 81, на которой закреплена тяга 82 сектора стабилизатора 83, установленного на кронштейне 62 блока секторов 61 ниже сектора ножного управления 63 (фиг. 7, 10). На секторе стабилизатора 83 одним концом закреплены два каната с наконечниками 84, 85 (фиг. 9, 10). Второй конец каната с наконечниками 84 проходит через ролик 86, установленный на кронштейне 87, и закреплен на одном конце цепи 88 механизма управления стабилизатором 89. Второй конец каната с наконечниками 85 проходит через ролик 73, установленный на кронштейне 74, далее проходит через ролик 90, установленный на кронштейне 87, и закреплен на другом конце цепи 88 механизма управления стабилизатором 89. С другой стороны механизма управления стабилизатором 89 расположена качалка 91, к которой подсоединена тяга 92. Второй конец тяги 92 закреплен на стабилизаторе 93 (фиг. 9, 10, 11).
Система управления вертолетом работает следующим образом.
Пилот в зависимости от полетной ситуации для изменения тангажа перемещает ручку управления 1 вперед или назад, для изменения крена перемещает ручку управления 1 вправо или влево, для изменения высоты полета перемещает рычаг шаг-газ 2 вверх или вниз. Для изменения направления полета один из пилотов перемещает вперед правую или левую педаль ножного управления 50 (фиг. 1).
В предлагаемой системе ручного управления система продольного управления работает следующим образом.
При перемещении любым из пилотов своей ручки управления 1 вперед или назад перемещаются тяга 3, тяги 4 и тяга 5 (фиг. 1, 2, 3, 4). Тяга 5 поворачивает качалку 15, расположенную на оси 97 кронштейна 13, затем через тягу 19 поворачивает качалку 17, расположенную на оси 98 рычага 14, которая одним плечом через тягу 21, качалку 23, расположенную на кронштейне 25, тягу 26 и качалки 29, 31, расположенные на кронштейне 30, перемещает тягу 32, закрепленную на приводе рулевом 33, а другим плечом через тягу 28 и качалки 44,46, расположенные на кронштейне 45, перемещает тягу 47, закрепленную на приводе рулевом 48, тем самым поступает управляющий импульс на приводы рулевые 33, 48 (фиг. 5, 6). В результате этого, перемещаются выходные штоки приводов рулевых 33, 48, которые через автомат перекоса (не показан) поворачивают в соответствующем направлении ось несущего винта вертолета, управляя им в продольном направлении.
Система поперечного управления работает следующим образом.
При перемещении любым из пилотов своей ручки управления 1 влево или вправо перемещаются тяга 7, тяги 8 и тяга 9 (фиг. 1, 2, 3, 4). Тяга 9 поворачивает качалку 16, расположенную на оси 97 кронштейна 13, затем через тягу 20 поворачивает качалку 18, расположенную на оси 98 рычага 14, которая через тягу 22, качалку 24, расположенную на кронштейне 25, тягу 27 и качалки 35, 37, расположенные на кронштейне 36, перемещает тягу 38, закрепленную на приводе рулевом 39. В результате этого перемещается выходной шток привода рулевого 39, который через качалку 41, расположенную на кронштейне 42, перемещает звено 43. Звено 43 через автомат перекоса (не показан) поворачивает в соответствующем направлении ось несущего винта, управляя автоматом перекоса в поперечном направлении (фиг. 5, 6).
Система общего шага работает следующим образом.
При перемещении любым из пилотов своего рычага шаг-газ 2 вверх или вниз перемещаются тяга 10, тяги 11 и тяга 12 (фиг. 1, 2, 3, 4). Тяга 12 поворачивает рычаг 14, расположенный на оси 97 кронштейна 13, который, поворачиваясь относительно оси 97, заставляет поворачиваться качалки 17, 18, расположенные на рычаге 14, относительно оси 98, вследствие чего передается движение на тяги 21, 22, 28. Тяга 21 через качалку 23, расположенную на кронштейне 25, тягу 26 и качалки 29, 31, расположенные на кронштейне 30, перемещает тягу 32, закрепленную на приводе рулевом 33.
Тяга 22 через качалку 24, расположенную на кронштейне 25, тягу 27 и качалки 35, 37, размещенные на кронштейне 36, перемещает тягу 38, закрепленную на приводе рулевом 39. Тяга 28 через качалки 44, 46, расположенные на кронштейне 45, перемещает тягу 47, закрепленную на приводе рулевом 48. В результате этого перемещаются выходные штоки всех трех приводов рулевых 33, 39, 48, тем самым приводы рулевые 33, 48 непосредственно, а привод рулевой 39 через качалку 41, расположенную на кронштейне 42, и звено 43, изменяют общий шаг несущего винта и, соответственно, изменяют его силу тяги (фиг. 5, 6).
Система ножного управления работает следующим образом.
При перемещении любым из пилотов своих педалей ножного управления 50 перемещаются тяга 51, тяги 52 и тяга 53 (фиг. 1, 2, 3, 4). Тяга 53 поворачивает качалку 54, расположенную на кронштейне 55, при этом поворачивается качалка 56, которая перемещает тягу 57. В результате этого перемещается выходной шток рулевого привода 58, который через качалку 60 поворачивает сектор ножного управления 63 блока секторов 61 (фиг. 7).
В случае поворота сектора ножного управления 63 в одну сторону происходит натяжение двух тросов с наконечниками 64, 65 и ослабление двух других тросов с наконечниками 66, 67 (фиг. 7). В случае поворота сектора ножного управления 63 в другую сторону происходит натяжение двух тросов с наконечниками 66, 67 и при этом ослабление двух других тросов с наконечниками 64, 65.
При своем натяжении два троса с наконечниками 64,65 через цепи 70, 72 поворачивают стакан звездочки 75 хвостового редуктора 76 в одну сторону. При своем натяжении два троса с наконечниками 66, 67 через цепи 70, 72 поворачивают стакан звездочки 75 хвостового редуктора 76 в другую сторону (фиг. 8). При повороте стакана звездочки 75 хвостового редуктора 76 изменяются углы поворота лопастей хвостового винта, тем самым изменяется тяга хвостового винта.
Система управления стабилизатором работает следующим образом.
Качалка 77 находится на тарелке автомата перекоса (не показан) и реагирует на ее перемещения (фиг. 9, 10). Качалка 77 через тягу 78, поворачивает качалки 79, 81, установленные на кронштейне 80 (фиг. 10). Качалка 81 через тягу 82 поворачивает сектор стабилизатора 83, установленный на кронштейне 62 блока секторов 61 (фиг. 7, 10). В случае поворота сектора стабилизатора 83 в одну сторону происходит натяжение каната с наконечниками 84 и ослабление другого каната с наконечниками 85. В случае поворота сектора стабилизатора 83 в другую сторону происходит натяжение каната с наконечниками 85 и ослабление другого каната с наконечниками 84. При своем натяжении канат с наконечниками 84, изменяя свое направление на ролике 86, установленного на кронштейне 87, перемещает цепь 88, которая поворачивает вал механизма управления стабилизатором 89 в одну сторону. При своем натяжении канат с наконечниками 85, изменяя свое направление на ролике 90, установленном на кронштейне 87, перемещает цепь 88, которая поворачивает вал механизма управления стабилизатором 89 в другую сторону. При повороте вала механизма управления стабилизатором 89 перемещается качалка 91, которая приводит в движение тягу 92, которая изменяет угол установки стабилизатора 93 (фиг. 11).
Предлагаемое изобретение имеет ряд особенностей и преимуществ по сравнению с прототипом:
- в системе ручного управления установлен узел суммирующий 6, позволяющий передавать управляющие движения от пилота к приводам рулевым 33, 39, 48 таким образом, что управление общим шагом вертолета обеспечивается работой трех приводов рулевых 33, 39, 48, продольное управление обеспечивается работой двух приводов рулевых 33, 48, а поперечное управление обеспечивается работой одного привода рулевого 39, что уменьшает суммарную длину проводки управления, тем самым уменьшая ее массу;
- в проводке ножного управления обеспечено полное дублирование за счет установки второй цепи и второй звездочки, что значительно повышает безопасность полетов в случае выхода из строя любого элемента в одной из цепочек управления от сектора ножного управления 63 до вала хвостового редуктора 76;
- повышена безопасность полетов особенно при переходе вертолета на режимы моторного планирования и авторотации, а также улучшены балансировочные характеристики вертолета за счет установки управляемого стабилизатора 93.
На предлагаемую систему управления вертолетом разработана и утверждена документация. Проведена отработка конструкции изобретения, в результате которой предлагаемое техническое решение успешно себя зарекомендовало в опытном образце. При производстве планируется применять современные материалы и технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
| РУЧКА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2017 |
|
RU2652372C1 |
| КАБИНА ВЕРТОЛЕТА С ТРАВМОБЕЗОПАСНЫМИ ОРГАНАМИ УПРАВЛЕНИЯ | 2004 |
|
RU2265556C1 |
| УСТАНОВКА РУЛЕВОГО ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2636195C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ВЕРТОЛЁТА | 2022 |
|
RU2789499C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| УСТАНОВКА ДУБЛИРОВАННЫХ РУЛЕВЫХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2021 |
|
RU2773301C1 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |






Изобретение относится к области авиации, в частности к системам управления вертолетом с бустерным управлением с резервированием. Система управления вертолетом содержит системы ручного и ножного управления. Система ручного управления содержит узел суммирующий (6), который расположен на потолке грузовой кабины. Ручки управления (1), рычаги шаг-газ (2), педали ножного управления (50) с помощью тяг и качалок соединены с узлом суммирующим (6), который в свою очередь соединен с приводами рулевыми (33, 39, 48) с помощью тяг и качалок. В систему управления вертолетом введена система управления стабилизатором (93). Обеспечено дублирование забустерной части ножного управления с помощью выполнения двух независимых друг от друга цепочек ножного управления от сектора ножного управления (63) до хвостового редуктора (76). Достигается снижение массы и повышение надежности системы управления. 11 ил.
Система управления вертолетом, содержащая системы ручного и ножного управления, ручки управления (1), рычаги шаг-газ (2), педали ножного управления (50), тяги и качалки,
отличающаяся тем, что
система ручного управления содержит узел суммирующий (6), который расположен на потолке грузовой кабины и состоит из кронштейна (13), на оси (97) которого установлены рычаг (14) и две качалки (15, 16), на конце рычага (14) на оси (98) установлены две качалки (17, 18), одно плечо качалки (15) соединено с плечом качалки (17) с помощью тяги (19), а одно плечо качалки (16) соединено с плечом качалки (18) с помощью тяги (20),
система ручного управления содержит две соединенные между собой с помощью вала (94) ручки управления (1), которые с помощью тяги (3), качалки (100) и тяг (4, 5) соединены с узлом суммирующим (6), внутри вала (94) расположена тяга, которая с помощью тяги (7), качалки (101) и тяг (8, 9) соединена с узлом суммирующим (6), при этом два рычага шаг-газ (2) соединены между собой тягой (95), один из рычагов шаг-газ (2) соединен с узлом суммирующим (6) с помощью тяги (10), качалки (102) и тяг (11, 12),
к узлу суммирующему (6) со стороны кабины подсоединены три тяги (5, 9, 12), с другой стороны на узле суммирующем (6) закреплена тяга (21) ко второму плечу качалки (17), а тяга (28) закреплена к третьему плечу качалки (17), тяга (22) закреплена ко второму плечу качалки (18),
узел суммирующий (6) соединен с приводами рулевыми (33, 39, 48), при этом вторые концы тяг (21, 22) присоединены соответственно к первым плечам двуплечих качалок (23, 24), установленных на кронштейне (25), ко вторым плечам качалок (23, 24) прикреплены соответственно тяги (26, 27), второй конец тяги (26) прикреплен к качалке (29), закрепленной на кронштейне (30), с другой стороны кронштейна (30) расположена качалка (31), к которой прикреплена тяга (32), второй конец тяги (32) прикреплен к входной точке привода рулевого (33), установленного на кронштейне (34), второй конец тяги (27) прикреплен к качалке (35), закрепленной на кронштейне (36), с другой стороны кронштейна (36) расположена качалка (37), к которой прикреплена тяга (38), второй конец тяги (38) прикреплен к входной точке привода рулевого (39), установленного на кронштейне (40), выходная точка привода рулевого (39) закреплена на качалке (41), установленной на кронштейне (42), на другом конце качалки (41) установлено звено (43), тяга (28) прикреплена к качалке (44), закрепленной на кронштейне (45), с другой стороны кронштейна (45) расположена качалка (46), к которой прикреплена тяга (47), второй конец тяги (47) прикреплен к входной точке привода рулевого (48), установленного на кронштейне (49), кронштейны (30, 36, 45) установлены на потолке грузовой кабины,
система ножного управления вертолетом содержит две пары педалей ножного управления (50), которые соединены между собой с помощи тяги (96) и соединены с рулевым приводом (58), к педалям ножного управления (50) подсоединена тяга (51), другой конец которой через качалку (103) соединен с одним элементом тяги (52), другой элемент которой соединен с одним концом тяги (53), второй конец которой закреплен на качалке (54), установленной на кронштейне (55), с другой стороны которого установлена качалка (56), соединенная с рулевым приводом (58) с помощью тяги (57),
рулевой привод (58) установлен на кронштейне (59), выходной шток рулевого привода (58) подсоединен к качалке (60) блока секторов (61), в котором на кронштейне (62) установлен сектор ножного управления (63), на секторе ножного управления (63) одним концом закреплены четыре троса с наконечниками (64, 65, 66, 67), при этом два троса с наконечниками (64, 66) вторым своим концом закреплены на цепи (70), проходя через ролик (68), а два других троса с наконечниками (65, 67) вторым своим концом закреплены на цепи (72), проходя через ролик (71), цепи (70, 72) установлены на стакане звездочки (75) хвостового редуктора (76), кронштейн (55) расположен над потолком грузовой кабины в редукторном отсеке, подходящая к нему тяга (53) находится под потолком в грузовой кабине, а отходящая от него тяга (57) находится в редукторном отсеке,
в систему управления вертолетом введена система управления стабилизатором, которая содержит установленную на тарелке автомата перекоса качалку (77), которая с помощью тяги (78) связана с качалкой (79), установленной на кронштейне (80), а с другой стороны на кронштейне (80) установлена качалка (81), которая связана с сектором стабилизатора (83) с помощью тяги (82),
на секторе стабилизатора (83) одним концом закреплены два каната с наконечниками (84, 85), при этом второй конец каната с наконечником (84) проходит через ролик (86) и закреплен на одном конце цепи (88), второй конец каната с наконечником (85) проходит через ролики (73, 90) и закреплен на втором конце цепи (88) механизма управления стабилизатором (89), на котором закреплена качалка (91), соединенная со стабилизатором (93) с помощью тяги 92.
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| US 20180093763 A1, 05.04.2018 | |||
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ | 2006 |
|
RU2340511C2 |
| Система и способ разделения и контроля изотопов йода в теплоносителе атомной электростанции (АЭС) | 2022 |
|
RU2799331C1 |
| SU 1225179 A1, 10.05.1996. | |||

