Изобретение относится к области авиационной техники, а именно к приводу соосных винтов вертолета.
Известен (RU, патент 2364550, опубл. 20.08.2009) вертолет, содержащий каркас, винтомоторную установку, систему управления, причем винтомоторная установка закреплена на фюзеляже с возможностью кругового наклона на требуемый угол относительно вертикальной оси вертолета через шарнир-амортизатор, соосные винты вертолета имеют встречное синхронное вращение, жесткое крепление лопастей с автоматической авторотацией, например, от центробежной силы, лопасти соосных винтов моно или решетчато-щелевые, по длине цельные или складные.
Недостатком такой схемы является различная индуктивная скорость отбрасывания воздуха. Это объясняется различной окружной скоростью по радиусу при вращении лопасти. В результате ближе к оси вращения винта индуктивная скорость отбрасывания воздуха будет уменьшаться и имеет меньшую величину, чем во внешней части поверхности, ометаемой несущим винтом при вращении. Поджатие воздуха к оси вращения винта будет уменьшаться на режиме висения вертолета у земли, соответственно эффект влияния «воздушной подушки» будет уменьшаться, тем более после прохождения плоскости вращения винта воздух отбрасывается вниз и закручивается в сторону вращения винта. Т.о., воздух, отбрасываемый винтом, образует конус, что не позволяет достичь большей плотности воздуха, а значит, и большей эффективности «воздушной подушки».
Известны (Суриков Н.Ф. и др. Вертолет Ка-26. М.: Транспорт, 1982, с. 107-110) системы соосных несущих винтов, служащие для создания подъемной силы и для управления летательным аппаратом, реализованные на вертолетах Ка-26, Ка-32. Несущие системы соосных вертолетов имеют большие габариты по высоте, так как для исключения возможности соударения лопастей, вращающихся в разных направлениях верхнего и нижнего несущих винтов, их разносят по высоте на величину, равную 0,2 R-радиуса винта, то есть, для вертолета Ка-26 с диаметром несущего винта 13 м увеличение габаритного размера по высоте составляет 1,3 м, для Ка-32 эта величина составляет 1,6 м.
Относительно большой габаритный размер по высоте у вертолетов с соосной несущей системой по сравнению с одновинтовыми вертолетами такой же грузоподъемности усложняет их обслуживание при эксплуатации, для них требуются высокие помещения - ангары, что особенно трудно выполнимо при базировании соосных вертолетов на корабле, более того большой размер по высоте приводит к необходимости демонтажа главного редуктора при транспортировке соосного вертолета с последующей сборкой, повторным проведением контрольно-испытательных полетов.
Наиболее близким аналогом разработанного технического решения можно признать (RU, патент 2155702, опубл. 10.09.2000)систему двух соосных несущих винтов летательного аппарата, содержащую редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, содержащая также цепи управления каждым из несущих винтов, включающие два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов, причем вал верхнего несущего винта редуктора выполнен с возможностью своего осевого перемещения относительно опор и приводной шестерни редуктора, при этом управление несущими винтами выполнено таким образом, что снаружи вала, в пространстве между верхним и нижним несущими винтами отсутствуют какие-либо элементы конструкции вследствие того, что автомат перекоса верхнего несущего винта расположен в нижней части корпуса редуктора, выполнен с возможностью своего осевого перемещения относительно редуктора и связан быстроразъемными соединениями с тягами управления лопастями верхнего несущего винта, проведенными внутри вала верхнего несущего винта, автомат перекоса нижнего несущего винта расположен в верхней части корпуса редуктора с возможностью своего осевого перемещения и связан тягами с осевыми шарнирами лопастей нижнего несущего винта, а для осевого перемещения автоматов перекоса с целью управления общим дифференциальным шагом несущих винтов применен рычажный параллелограмно-суммирующий механизм.
Недостатком известной системы следует признать ее сложность, а также малую пригодность для использования на малых (легких) вертолетах.
Техническая проблема, решаемая с использованием разработанной конструкции, состоит в расширении ассортимента приводов соосных винтов вертолета.
Технический результат, достигаемый при реализации разработанной конструкции, состоит в возможности более простого и экономичного привода несущих винтов вертолета, выполненного по соосной схеме.
Для достижения указанного технического результата предложено использовать привод соосных винтов вертолета разработанной конструкции. Привод соосных винтов, разработанной конструкции, содержит систему соосно несущих верхнего и нижнего винтов, установленных с возможностью вращения в противоположные стороны, и источник электрического питания, к которому подключены средства вращения несущих винтов. Верхний несущий винт закреплен на валу ротора электродвигателя, а нижний несущий винт закреплен на полом валу, внутри которого проходит вал ротора, а сам полый вал закреплен на статоре электродвигателя, выполненном с возможностью вращения и установленном в упорном подшипнике в корпусе летательного аппарата, в котором размещен источник электроэнергии, подающий через скользящие контакты электропитание на электродвигатель.
В некоторых вариантах реализации нижний несущий винт вместе со статором электродвигателя закреплен на полом валу, который посредством упорного подшипника установлен в корпус летательного аппарата, причем внутри полого вала проходят токопроводы, которые через скользящие контакты передают электропитание на электродвигатель от источника электрической энергии, расположенного в корпусе летательного аппарата.
Возможен вариант реализации разработанного привода, при котором нижний несущий винт закреплен на полом валу, внутри которого проходит вал ротора, на котором закреплен верхний несущий винт, причем сам полый вал закреплен на статоре электродвигателя и установлен в упорный подшипник в корпусе летательного аппарата, причем к статору закреплен источник электроэнергии, подающий электропитание на электродвигатель.
Также возможен вариант реализации, при котором нижний несущий винт вместе со статором электродвигателя закреплен на полый вал, который на упорном подшипнике установлен в корпусе летательного аппарата, причем к статору закреплен источник электроэнергии, подающий электропитание на электродвигатель.
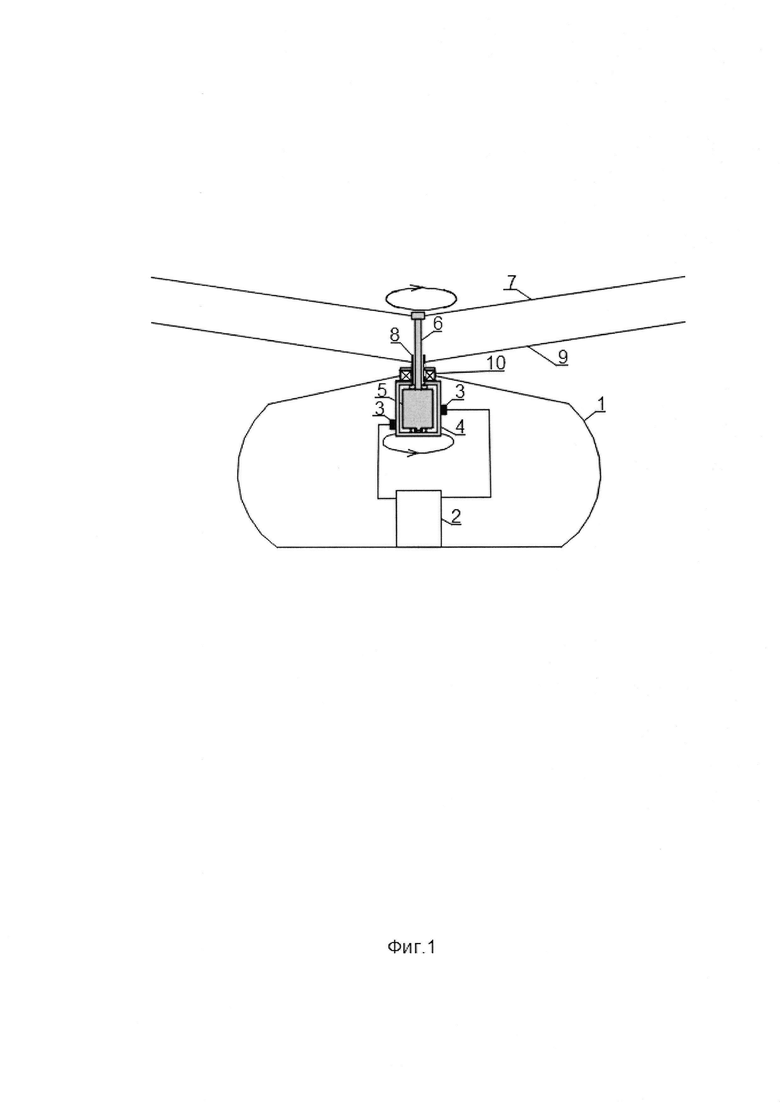
В дальнейшем конструкция будет рассмотрена с использованием графического материала, при этом использованы следующие обозначения: корпус вертолета 1, источник электроэнергии 2, скользящие контакты 3, статор 4, ротор 5, вал ротора 6, верхний несущий винт 7, полый вал 8, нижний несущий винт 9, упорный подшипник 10, токопроводы 11
Реализация технического результата возможна по нескольким вариантам.
По первому варианту (Фиг. 1) работа привода происходит следующим образом. При подаче электрического тока из расположенного в корпусе 1 от источника электроэнергии 2 через скользящие контакты 3 на электродвигатель, состоящий из статора 4 и ротора 5, ротор 5 начинает вращаться вместе с валом ротора 6 и насаженным на него верхним несущим винтом 7. При этом создается реактивный момент, который раскручивает статор 4 вместе с полым валом 8, и насаженным на него нижним несущим винтом 9 в противоположном направлении. Возникающая при вращении верхнего несущего винта 7 и нижнего несущего винта 8 подъемная сила через упорный подшипник 10 передается на корпус 1.
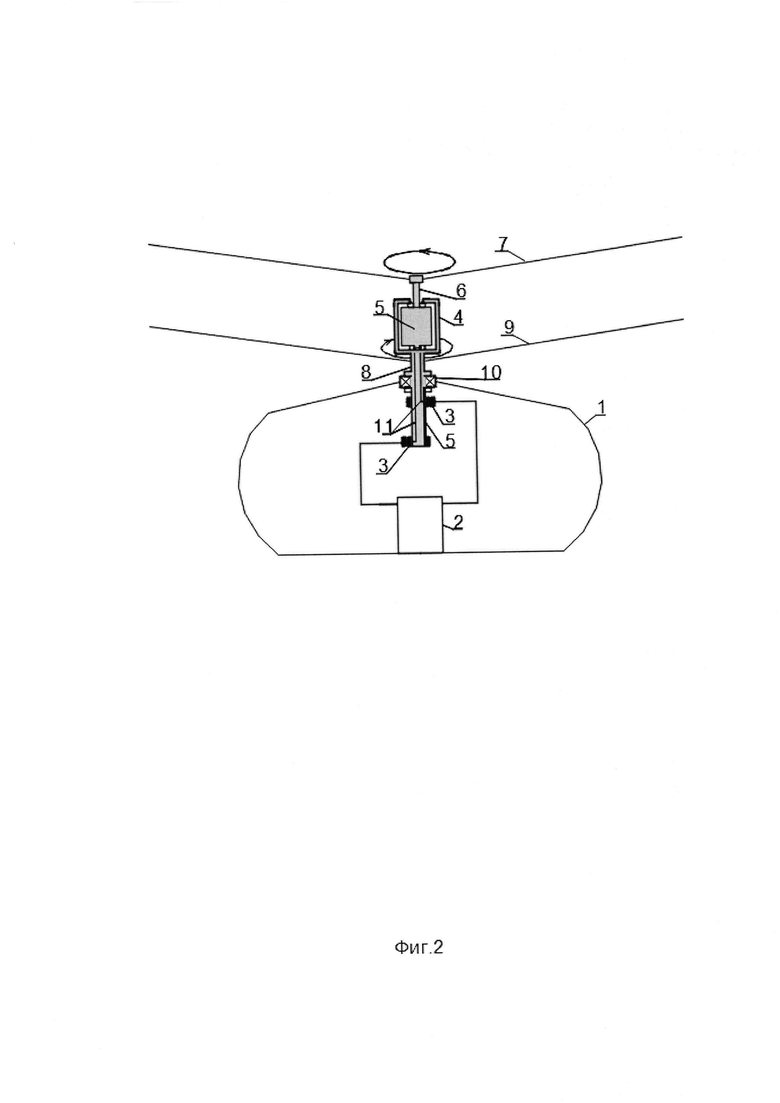
По второму варианту (Фиг. 2) работа привода происходит следующим образом. При подаче электрического тока из расположенного в корпусе 1 источника электроэнергии 2 через скользящие контакты 3 и токопроводы 11, расположенные в полом вале 8 на электродвигатель, состоящий из ротора 5 и статора 4, ротор 5 начинает вращаться вместе с валом ротора 6 и насаженным на него верхним несущим винтом 7. При этом создается реактивный момент, который раскручивает статор 4 вместе с полым валом 8 и насаженным на него нижним несущим винтом 9 в противоположном направлении. Возникающая при вращении верхнего несущего винта 7 и нижнего несущего винта 9 подъемная сила через упорный подшипник 10 передается на корпус 1.
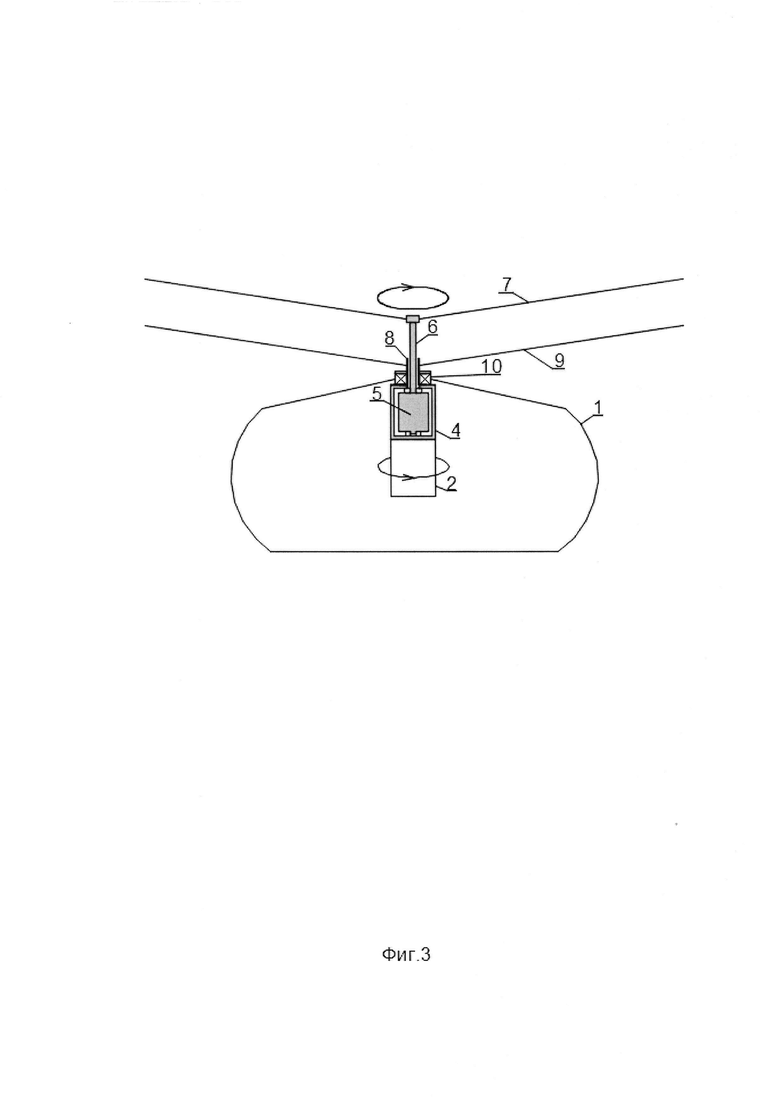
По третьему варианту (Фиг. 3) работа привода происходит следующим образом. При подаче электрического тока из источника электроэнергии 2, закрепленного на статоре 4, ротор 5 вращается вместе с валом ротора 6 и насаженным на него верхним несущим винтом 7. При этом создается реактивный момент, который раскручивает статор 4 вместе с полым валом 8 и насаженным на него нижним несущим винтом 9 в противоположном направлении. Возникающая при вращении верхнего несущего винта 7 и нижнего несущего винта 9 подъемная сила через упорный подшипник 10 передается на корпус 1.
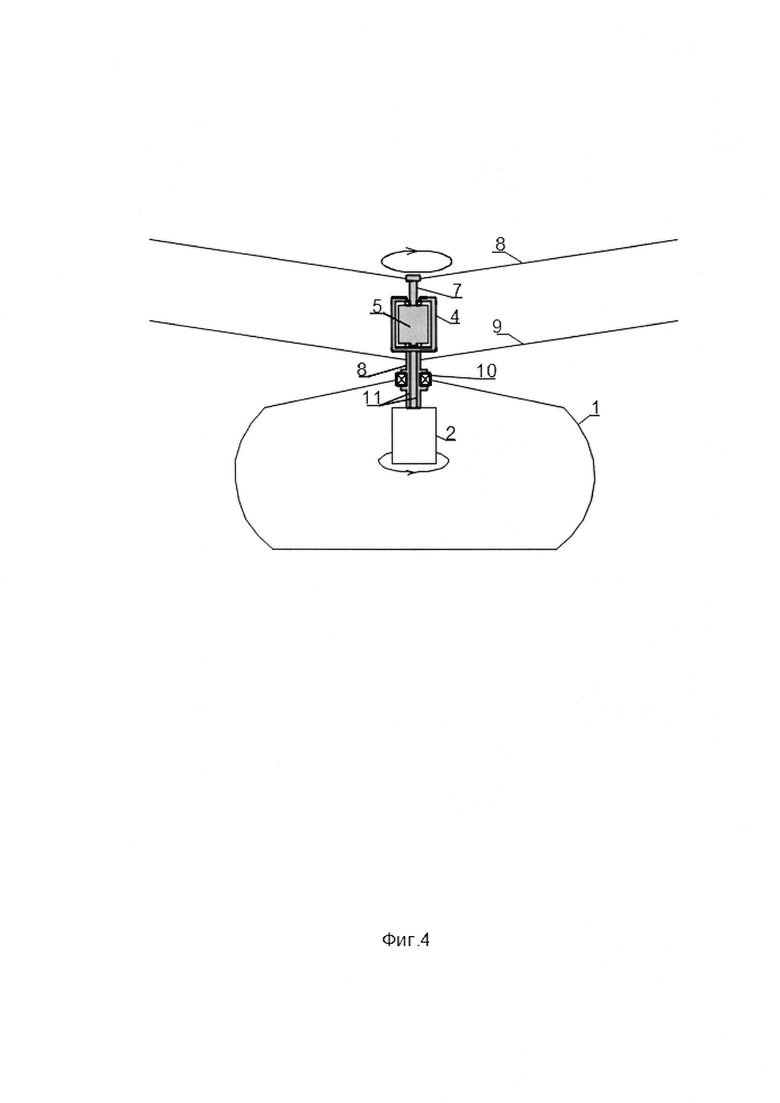
Вариант 4 (Фиг. 4)
Работа привода происходит следующим образом. При подаче электрического тока из источника электроэнергии 2, закрепленного на полом валу 8 через токопроводы 11, расположенные в полом вале 8 на электродвигатель, ротор 5 вращается вместе с валом ротора 6 и насаженным на него верхним несущим винтом 7. При этом создается реактивный момент, который раскручивает статор 4 вместе с полым валом 8 и насаженным на него нижним несущим винтом 9 в противоположном направлении. Возникающая при вращении верхнего несущего винта 7 и нижнего несущего винта 9 подъемная сила через упорный подшипник 10 передается на корпус 1.
Изобретение относится к области авиационной техники, а именно к системам несущих винтов летательных аппаратов. Электрический привод соосных винтов вертолета содержит систему верхнего и нижнего несущих винтов, установленных с возможностью вращения в противоположные стороны, источник электрического питания, к которому подключены средства вращения несущих винтов. Верхний несущий винт закреплен на валу ротора электродвигателя. Нижний несущий винт закреплен на полом валу, внутри которого проходит вал ротора. Полый вал закреплен на статоре электродвигателя, выполненном с возможностью вращения и установленном в упорном подшипнике в корпусе летательного аппарата, в котором размещен источник электроэнергии, подающий через скользящие контакты электропитание на электродвигатель. Обеспечивается создание простого и экономичного привода несущих винтов вертолета, выполненного по соосной схеме. 4 н.п. ф-лы, 4 ил.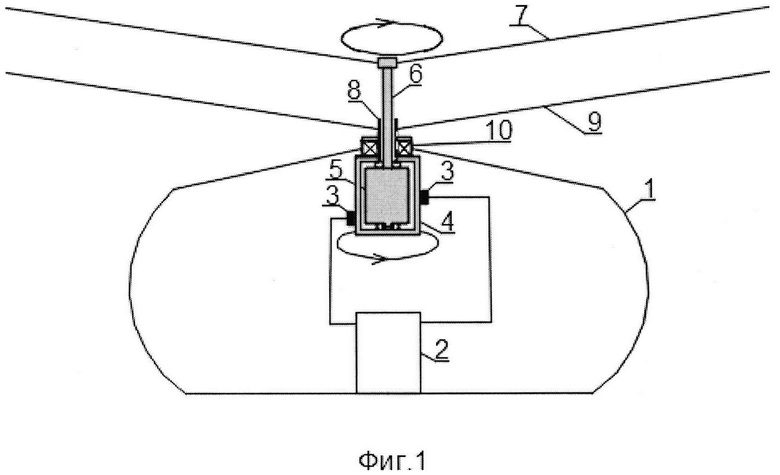
1. Электрический привод соосных винтов вертолета, содержащий систему соосно несущих верхнего и нижнего винтов, установленных с возможностью вращения в противоположные стороны, и источник электрического питания, к которому подключены средства вращения несущих винтов, отличающийся тем, что верхний несущий винт закреплен на валу ротора электродвигателя, а нижний несущий винт закреплен на полом валу, внутри которого проходит вал ротора, а сам полый вал закреплен на статоре электродвигателя, выполненном с возможностью вращения и установленном в упорном подшипнике в корпусе летательного аппарата, в котором размещен источник электроэнергии, подающий через скользящие контакты электропитание на электродвигатель.
2. Электрический привод соосных винтов вертолета, содержащий систему соосно несущих верхнего и нижнего винтов, установленных с возможностью вращения в противоположные стороны, и источник электрического питания, к которому подключены средства вращения несущих винтов, отличающийся тем, что верхний несущий винт закреплен на валу ротора электродвигателя, нижний несущий винт вместе со статором электродвигателя закреплен на полом валу, который посредством упорного подшипника установлен в корпусе летательного аппарата, причем внутри полого вала проходят токопроводы, которые через скользящие контакты передают электропитание на электродвигатель от источника электрической энергии, расположенного в корпусе летательного аппарата.
3. Электрический привод соосных винтов вертолета, содержащий систему соосно несущих верхнего и нижнего винтов, установленных с возможностью вращения в противоположные стороны, и источник электрического питания, к которому подключены средства вращения несущих винтов, отличающийся тем, что верхний несущий винт закреплен на валу ротора электродвигателя, нижний несущий винт закреплен на полом валу, внутри которого проходит вал ротора, на котором закреплен верхний несущий винт, причем сам полый вал закреплен на статоре электродвигателя и установлен в упорный подшипник в корпусе летательного аппарата, причем к статору закреплен источник электроэнергии, подающий электропитание на электродвигатель.
4. Электрический привод соосных винтов вертолета, содержащий систему соосно несущих верхнего и нижнего винтов, установленных с возможностью вращения в противоположные стороны, и источник электрического питания, к которому подключены средства вращения несущих винтов, отличающийся тем, что верхний несущий винт закреплен на валу ротора электродвигателя, нижний несущий винт вместе со статором электродвигателя закреплен на полом валу, который на упорном подшипнике установлен в корпусе летательного аппарата, причем к статору закреплен источник электроэнергии, подающий электропитание на электродвигатель.
| DE 102016206551 B4, 22.03.2018 | |||
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2583125C1 |
| DE 102011053787 A1, 21.03.2013 | |||
| US 10150567 B2, 11.12.2018. | |||

