Изобретение относится к летательным аппаратам тяжелее воздуха - вертолетам.
Заявителю известен аналог заявляемого изобретения, представляющий собой действующую кордовую модель автожира с двигателем внутреннего сгорания, в которой несущей системой служат размещенные на валу вместо лопастей полые цилиндры с множеством отогнутых лопаток, обеспечивающих вращения цилиндров за счет набегающего на них потока воздуха (журнал «Моделист-конструктор» №12, 2003 г., с.19-21).
Недостатком этой модели является то, что для его отрыва от земли необходимо произвести разгон за счет тяги воздушного винта. Такой летательный аппарат не будет иметь возможность зависать на месте, лететь боком, задом или со скольжением.
Ближайшим аналогом (прототипом) заявляемого изобретения является двухвинтовый соосный вертолет Ка-18, содержащий корпус, внутренний и наружный соосные валы с лопастями несущих винтов, приводимые во вращение редуктором от двигателя, генератор, блок управления, механизм продольно-поперечного управления (Большая Советская Энциклопедия, т.4, М., издательство "Советская энциклопедия, 1971 г., с.553).
Недостатком прототипа является недостаточная надежность, маневренность и большие габариты при использовании лопастей.
Задачей, не решение которой направлено изобретение, является повышение весовой отдачи летального аппарата и улучшение его маневренности и летных характеристик.
Решение этой задачи достигается, тем что в соосном роторолете, содержащем корпус, внутренний и наружный соосные валы, приводимые во вращение редуктором от двигателя, генератор, блок управления, механизм продольно-поперечного управления, на внутреннем валу на оси закреплены верхние цилиндрические роторы, вращение цилиндрическим роторам передается через блок промежуточных шестерен, внутренний и наружный валы снабжены тормозами, а механизм продольно-поперечного управления выполнен в виде насаженного на наружный вал подшипника, на котором закреплена вилка, связанная с универсальной качалкой, соединенной с тягами продольного и поперечного управления, внутренний вал снабжен карданной крестовиной, а наружный вал снабжен карданным кольцом.
Получение технического результата изобретения возможно за счет использования тяги цилиндрических роторов, управление вращением которых осуществляется при использовании предлагаемого устройства.
На чертеже представлен соосный роторолет.
Роторолет содержит соосные внутренний вал 1, наружный вал 2, на осях 3 и 4 которых закреплены верхние цилиндрические роторы 5 и нижние цилиндрические роторы 6 соответственно, на внутреннем валу 1 установлен дифференциальный сателлит 7, связанный с блоками 8 промежуточных шестерен, обеспечивающих вращение цилиндрических роторов 5 и 6. Роторолет содержит также размещенные в корпусе 9 генератор 10, двигатель 11, посредством редуктора 12 кинематически связанный с валами 1 и 2, имеющими тормоза 13 и 14 соответственно, блок управления 15, механизм продольно-поперечного управления в виде насаженного на наружный вал 2 подшипника 16, на котором закреплена вилка 17, связанная с универсальной качалкой 18, соединенной с тягой 19 продольного управления и тягой 20 поперечного управления. Внутренний вал 1 снабжен карданной крестовиной 21, а наружный вал 2 снабжен карданным кольцом 22. Двигатель 11 соединен с блоком управления 15 тягой 23.
Соосный роторолет работает следующим образом.
Верхние цилиндрические роторы 5 и нижние цилиндрические роторы 6, насаженные на оси 3 и 4 внутреннего вала 1 и наружного вала 2 соответственно, вращаются в противоположные стороны, получая вращение от двигателя 11 через редуктор 12, дифференциальный саттелит 7 и блоки 8 промежуточных шестерен. Блок управления 15, получающий электропитание от генератора 10, преобразует радиосигналы (при беспилотном управлении) или сигналы пилота. Тяги 19 и 20 обеспечивают управление в продольно-поперечном направлении через универсальную качалку 18 и вилку 17, закрепленную на подшипнике 16, насаженном на наружный вал 2, снабженный карданным кольцом 22, взаимодействующим с карданной крестовиной 21, установленной на внутреннем валу 1. Путевое управление происходит за счет тормозов 13 и 14, воздействующих на валы 1 и 2 соответственно, управление подъемной силой осуществляет за счет тяги 23, соединенной с двигателем 11.
У вращающегося в воздушном потоке цилиндра отсутствует индуктивный поток, поэтому вращение верхних цилиндрических роторов 5 не вызывает вредного воздействия и потери тяги на нижних цилиндрических роторах 6, что позволяет существенно уменьшить расстояние между верхними и нижними роторами, что повлечет за собой снижение веса конструкции роторолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| Боковая ручка управления (варианты) | 2017 |
|
RU2681462C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| ТЕПЛОВОЗ | 2017 |
|
RU2649844C1 |
| Запирающее устройство аварийного люка летательного аппарата | 2023 |
|
RU2816324C1 |
| Аэродинамическое судно | 2016 |
|
RU2611676C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
Изобретение относится к летательным аппаратам тяжелее воздуха. Соосный роторолет содержит корпус, внутренний (1) и наружный (2) соосные валы, приводимые во вращение редуктором от двигателя (11), генератор (10), блок управления (15), механизм продольно-поперечного управления. На внутреннем валу на оси закреплены верхние цилиндрические роторы (5), а на наружном валу на оси закреплены нижние цилиндрические роторы (6). Вращение цилиндрическим роторам передается через блок (8) промежуточных шестерен, а внутренний и наружный валы снабжены тормозами (13, 14). Изобретение повышает весовую отдачу летательного аппарата, улучшает его маневренность и летные характеристики. 1 з.п. ф-лы, 1 ил.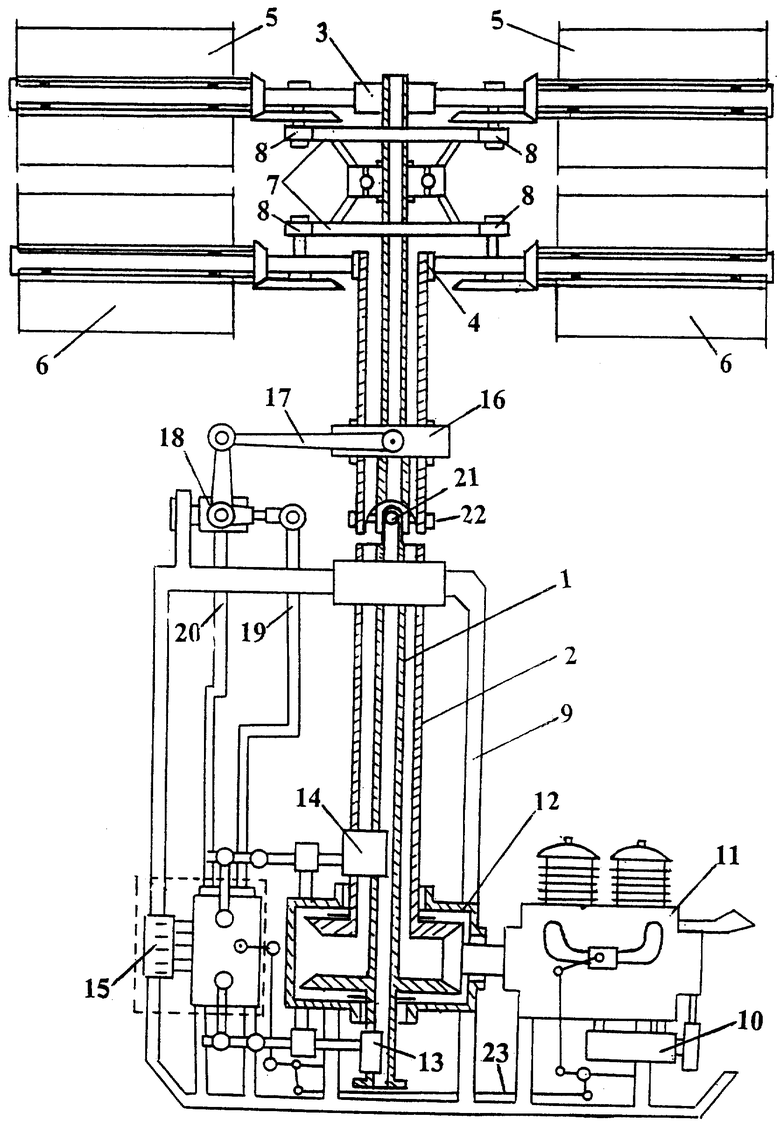
| БОЛЬШАЯ СОВЕТСКАЯ ЭНЦИКЛОПЕДИЯ, т.4 | |||
| - М.: Советская энциклопедия, 1971, с.553 | |||
| Ротор для вертикального подъема летательных аппаратов | 1925 |
|
SU3011A1 |
| РОТОРОПЛАН | 2001 |
|
RU2245824C2 |
| РОТОРНЫЙ МАХОЛЕТ | 2001 |
|
RU2199470C2 |
| US 5265827 А, 30.11.1993 | |||
| WO 2005049422 А, 02.06.2005. | |||

