Изобретение относится к метрологическому обеспечению - калибровке инклинометров, выполненных на основе трехосевого акселерометра. Такие инклинометры могут быть использованы в геофизических работах, устройствах автономной навигации и других задачах. Отличительной особенностью заявляемого изобретения является простота и дешевизна реализации.
Измерения акселерометром по осям чувствительности могут быть представлены в виде:

где:
А - результат измерения ускорения акселерометром по оси чувствительности;
G - действительное значение проекции вектора гравитационного ускорения 
k - коэффициент чувствительности акселерометра по оси;
m - статическая ошибка акселерометра по оси (показания акселерометра при отсутствии гравитации).
Величины k и m в общем случае неизвестны, но могут быть определены при калибровке в заводских или лабораторных условиях. Однако эти характеристики изменяются со временем и зависят от условий применения. Величина вектора гравитационного ускорения
Известны способы калибровки инклинометров [1], [2] и многие другие, заключающиеся в том, что калибруемые инклинометры устанавливаются в специальные ручные или автоматизированные установки, обеспечивающие повороты испытуемого прибора на определенные углы. Результаты сравниваются с эталонными измерениями. При необходимости проводится градуировка инклинометра путем проведения измерений при вращении прибора с выбранным шагом.
Недостатками таких способов являются высокие стоимость оборудования и трудоемкость.
Известен способ определения масштабного коэффициента акселерометра [3], заключающийся в том, что акселерометр поворачивают относительно оси на положительный и отрицательный углы и оценивают разность принятых сигналов. Такой прием позволяет устранить статическую ошибку измерений m.
Недостатком такого способа является сложность определения коэффициента чувствительности, поскольку величина вектора гравитационного ускорения
Наиболее близким к заявляемому способу является способ определения угла наклона трехосевым, j=1÷3, акселерометром [4], заключающийся в том, что акселерометр устанавливают так, чтобы его первая ось, выбираемая как ось вращения, пересекалась с вектором гравитационного ускорения

Способ [4] предполагает следующую процедуру калибровки.
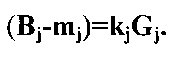
На Фиг. 1 приведены оси 1, 2 и 3 трехосевого акселерометра. Ось вращения 1 перпендикулярна плоскости рисунка и вектору гравитационного ускорения

При повороте осей акселерометра 2 и 3 вокруг оси 1 на 180°, Фиг. 1С, акселерометр второй оси измерит величину:
Поскольку G23=-G21, (см. Фиг. 1А и С), получим:

Аналогичные результаты будут получены при поворотах на ±90° относительно начального положения, Фиг. 1В и D:


Здесь учтено, что G24=-G22.
Сложение результатов измерений A2i по всем четырем, i=1÷4, положениям осей позволяет получить усредненную величину статической ошибки второй оси:

Важно отметить, что результаты измерений являются наиболее точными при значениях угла α, близких к 45°. Кроме того, как показано в [4], наиболее точный результат будет получен, если ось 1 перпендикулярна вектору гравитационного ускорения
В [4] предлагается вести калибровку осей по очереди, однако очевидно, что описанная выше процедура калибровки может вестись одновременно для осей 2 и 3 с получением статической ошибки третьей оси m3.
Для определения коэффициентов чувствительности kj по осям в [4] предлагается использовать соотношение (1), однако, как отмечено выше, величина вектора гравитационного ускорения
Таким образом, недостатком способа [4] является низкая точность определения коэффициентов чувствительности по осям акселерометра, а следовательно, низкая точность определения углов наклона объекта.
Задачей, решаемой заявляемым изобретением, является создание простого и дешевого способа калибровки трехосевого акселерометра для определения углов наклона объекта инклинометром.
Для решения этой задачи одновременно со второй осью аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m3, вычисляют относительный k32 - коэффициент чувствительности третьей k3 и второй k2 осей акселерометра, затем устанавливают акселерометр так, чтобы выбрать в качестве оси его вращения вторую ось, и, действуя аналогично, вычисляют статическую ошибку первой оси m1 и относительный k31 - коэффициент чувствительности третьей k3 и первой k1 осей, при практических измерениях устанавливают акселерометр в требуемое положение, измеряют проекции Bj вектора гравитационного ускорения
Существенными отличиями заявляемого способа по сравнению с прототипом являются:
Одновременно с калибровкой второй оси акселерометра аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m3. Это позволяет ускорить процесс калибровки.
В прототипе оси калибруют по очереди.
Вычисление относительного k32=k3/k2 коэффициента чувствительностей третьей и второй осей акселерометра позволяет оценить степень их различия, впоследствии выровнять их чувствительности и, благодаря этому, точно определить ориентацию вектора гравитации
Калибровка акселерометра с использованием второй оси в качестве оси вращения позволяет определить статическую ошибку первой оси m1 и относительный k31=k3/k1 коэффициент чувствительности третьей и первой осей. В итоге это позволяет выполнить калибровку акселерометра по всем осям с получением статических ошибок и относительных чувствительностей всех осей.
В прототипе делается неудачная попытка определить чувствительности k всех осей по отдельности, используя неточно известные значения вектора гравитационного ускорения
При практических измерениях после установки акселерометра в требуемое положение и проведения измерений проекций Bj вектора гравитационного ускорения
В прототипе имеется возможность скомпенсировать только статическую ошибку акселерометра.
Таким образом, главным отличием заявляемого способа по сравнению с известными авторам аналогами является то, что благодаря полученным соотношениям отпадает необходимость определения не только коэффициентов k - чувствительности по осям акселерометра, но и самого вектора гравитации
Заявляемое изобретение иллюстрируют следующие графические материалы.
Фиг. 1 - проекции вектора гравитационного ускорения
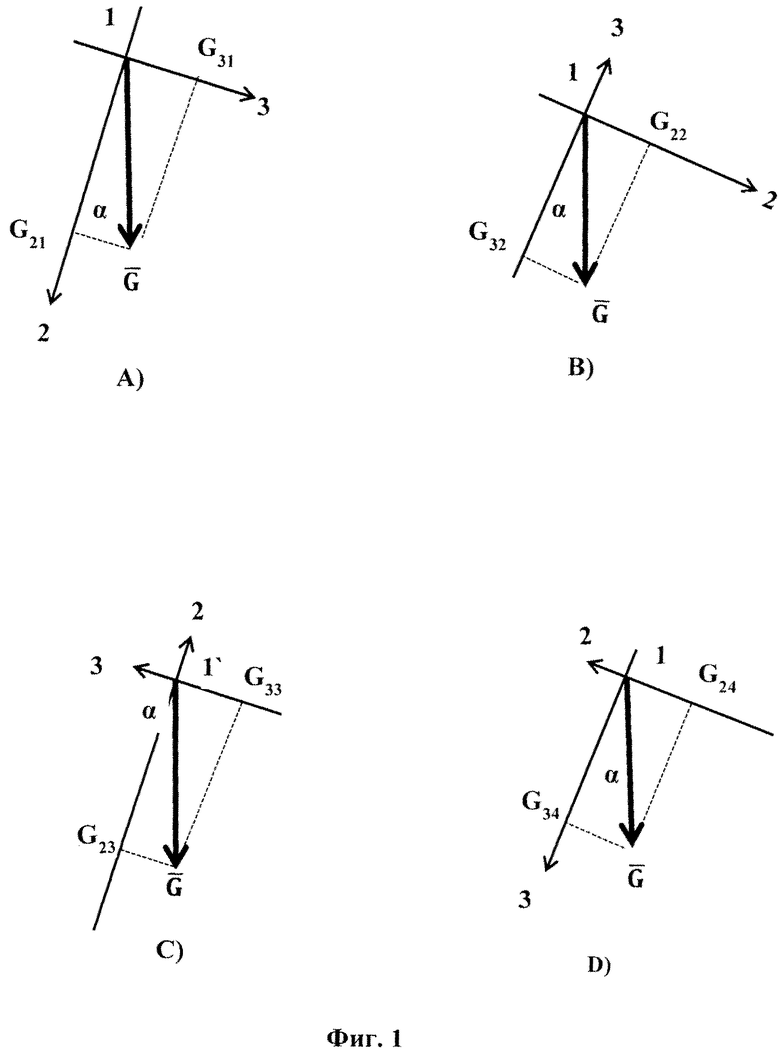
Фиг. 2 - проекции вектора гравитационного ускорения
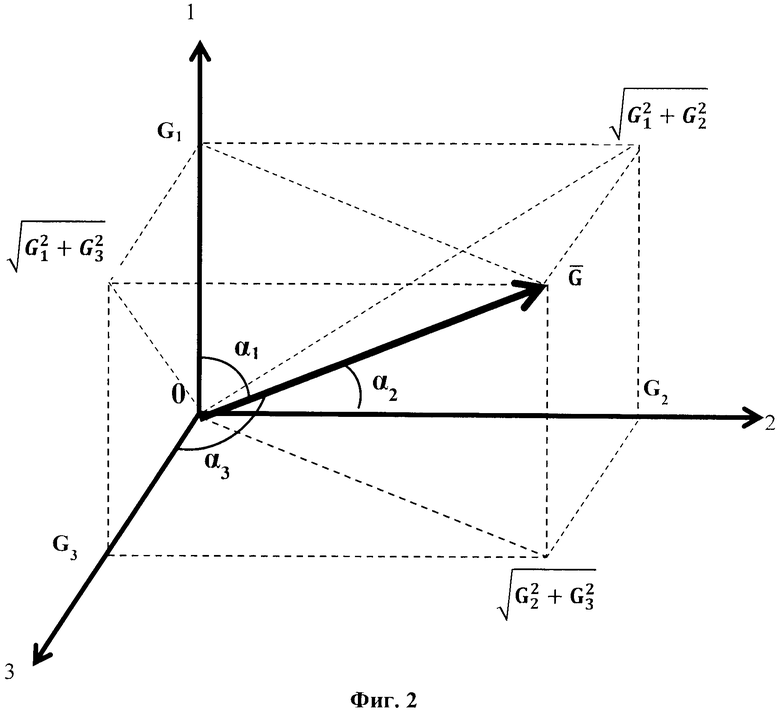
Фиг. 3 - углы наклона объекта относительно плоскости горизонта.
Рассмотрим возможность реализации заявляемого способа.
Для калибровки устанавливают акселерометр так, чтобы его одна ось (ось вращения), которую условно называем «первой», пересекалась с вектором гравитационного ускорения
Оси 2 и 3 акселерометра для калибровки целесообразно развернуть под углом 45° по отношению к вектору гравитационного ускорения
Калибруют вторую и третью оси акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A2i и A3i вектора гравитационного ускорения G соответственно на вторую и третью оси акселерометра. Вычисляют статическую ошибку акселерометра по второй m2 и третьей m3 осям путем усреднения измерений проекций вектора гравитационного ускорения на эту ось, используя формулу вида (7).
На втором этапе калибруют первую и третью оси акселерометра, для чего выбирают в качестве оси вращения вторую ось и, действуя аналогично описанному выше, измеряют A3i и A1i и вычисляют статическую ошибку первой оси m1.
Для вычисления относительного коэффициента чувствительности по второй и третьей осям акселерометра воспользуемся следующими соображениями: найдем разности между (3) и (4), а также между (5) и (6):


После возведения в квадрат (8) и (9) и сложения получим:

Для третьей оси, действуя аналогичным образом, получим:

Если разделить (11) на (10) и извлечь квадратный корень, то получим выражение для вычисления относительного коэффициента чувствительности третьей и второй осей акселерометра:
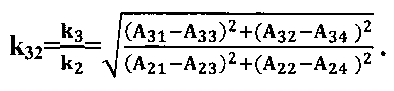
Таким образом, для вычисления относительного коэффициента чувствительности по третьей и второй осям не требуется знания коэффициентов чувствительности k по каждой из них, а также величины и ориентации вектора гравитационного ускорения
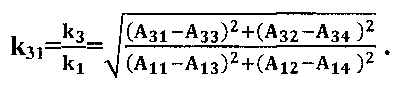
Аналогичным образом на втором этапе калибровки вычисляется относительный коэффициент чувствительности по третьей и первой осям акселерометра:
При практических измерениях - использовании откалиброванного акселерометра - устанавливают инклинометр на объект исследования и измеряют проекции Bj вектора гравитационного ускорения
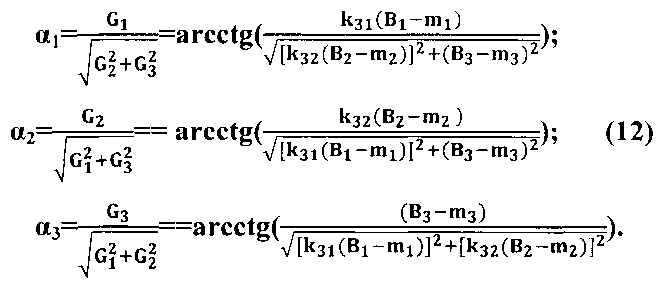
В этих соотношениях, в соответствии с (1), выражения в круглых скобках (Bj-mj) обеспечивают компенсацию статических ошибок измерений по осям акселерометра. Коэффициенты относительной чувствительности k32 и k31 нормируют измерения по всем осям, устраняя различия в их чувствительности. Справедливость выражений (12) легко проверить, подставив в них:
В ряде практических приложений удобно пользоваться углами βj=(90°-αj) между осями 1, 2 и 3 акселерометра и плоскостью горизонта. Эти углы рассчитываются по формулам, аналогичным (12), с заменой функции arcctg на arctg.
Например, Фиг. 3, если объектом является неподвижный или равномерно движущийся автомобиль, то, совместив первую ось акселерометра с продольной осью автомобиля, вторую ось акселерометра - с поперечной осью, а третью направить ортогонально первым двум, в соответствии с (12) можно определить углы β1 и β2 наклона автомобиля к плоскости горизонта Н.
При технической реализации трехосевой акселерометр через соответствующие контроллеры подключают к компьютеру, который обеспечивает прием измерений на этапах калибровки инклинометра, вычисление статических ошибок и относительных коэффициентов чувствительности, а при его практическом использовании - определение углов наклона объекта.
Таким образом, заявляемый способ может быть реализован и позволяет путем несложных измерений и вычислений откалибровать инклинометр и определить углы ориентации исследуемого объекта относительно гравитационного поля Земли.
Источники информации
1. Лобанков В.М. Калибровка скважинной геофизической аппаратуры. Издательство: Уфа: «Мастер-Копи» 2011, 176 стр. http://tinref.ru/000_uchebniki/05300tehnika/003_kalibrovka_geofizich_aparaturi/015.htm.
2. Патент RU 120215.
3. С.Ф. Коновалов и др. Автоматическое оборудование для испытаний акселерометров. Сборник 4 Санкт-Петербургской международной конференции по интегрированным навигационным системам. Май, 1997 г., ISB №5-900780-13-9.
4. Определение угла наклона акселерометром, http://bitaks.com/resources/inclinometer/ugol_naklona.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ТРЁХОСЕВОГО ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2022 |
|
RU2788825C1 |
| Способ калибровки инклинометра для определения пространственного положения нефтяных и газовых скважин | 2019 |
|
RU2712932C1 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2586341C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2016 |
|
RU2629539C1 |
| ВНУТРИСКВАЖИННАЯ КАЛИБРОВКА ИНСТРУМЕНТА ПРИ ПРОВЕДЕНИИ ИЗЫСКАНИЙ ПЛАСТОВ | 2009 |
|
RU2525564C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
Изобретение относится к метрологическому обеспечению - калибровке инклинометров, выполненных на основе трехосевого акселерометра. Способ предполагает при калибровке измерение проекций вектора гравитационного ускорения 

Способ калибровки акселерометрического трехосевого, j=1÷3, инклинометра, заключающийся в том, что акселерометр устанавливают так, чтобы его первая ось, выбираемая как ось вращения, пересекалась с вектором гравитационного ускорения  предпочтительно под углом 90°, калибруют вторую ось акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A2i вектора гравитационного ускорения
предпочтительно под углом 90°, калибруют вторую ось акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A2i вектора гравитационного ускорения  на вторую ось акселерометра, вычисляют статическую ошибку акселерометра по второй оси m2 путем усреднения измерений проекций вектора гравитации на эту ось:
на вторую ось акселерометра, вычисляют статическую ошибку акселерометра по второй оси m2 путем усреднения измерений проекций вектора гравитации на эту ось:
отличающийся тем, что одновременно со второй осью аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m3, вычисляют относительный k32 - коэффициент чувствительности третьей k3 и второй k2 осей акселерометра:
затем устанавливают акселерометр так, чтобы выбрать в качестве оси его вращения вторую ось и, действуя аналогично, вычисляют статическую ошибку первой оси m1 и относительный k31 - коэффициент чувствительности третьей k3 и первой k1 осей:

при практических измерениях устанавливают акселерометр в требуемое положение, измеряют проекции Bj вектора гравитационного ускорения  на все оси акселерометра, устраняют статические ошибки измерений по каждой оси, нормируют измерения по всем осям с использованием относительных коэффициентов чувствительности, вычисляя углы αj между осями чувствительности акселерометра и вектором гравитационного ускорения
на все оси акселерометра, устраняют статические ошибки измерений по каждой оси, нормируют измерения по всем осям с использованием относительных коэффициентов чувствительности, вычисляя углы αj между осями чувствительности акселерометра и вектором гравитационного ускорения  по формулам:
по формулам:



| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| US 20090217733 A1, 03.09.2009 | |||
| CN 103868527 A, 18.06.2014. | |||

