Изобретение относится к машиностроению, а именно к манипуляторам,. и может быть использовано для введения во внутренние полости и пространственной ориентации инструмента или контролирующих устройств.
Цель изобретения - расширение технологических возможностей за счет обеспечения возможности взаимного осевого перемещения дисков и гибкого элемента,
На фиг, 1 изображен манипулятор, общий вид; на фиг. 2 разрез А-А на фиг, 1; на фиг, 3 вариант исполнения манипулятора с возможностью осевого перемещения гибкого элемента относительно манипулятора,
Гибкий манипулятор содержит диски I с центральными отверстиями эластичные емкости в виде гибких трубок 2 для изменения взаимног о положения дисков , огибающие диски. 1 последовательно с наружной и внутренней сто ронь и связывающие диски 1 между со- .бой с возможностью изменения взаимного положения, и гибкий элемент 3, проходящий через центральные отверстия дисков 1, При этом эластичные емкости,, например гибкие трубки 2, связаны с индивидуальными источниками подвода энергоносителя 5 например давления,
С целью передвижения гибкого элемента 3 относительно манипулятора последний состоит по крайней мере из трех модулей 4 6, каждый из которых включает не менее чем по три диска 1,
Гибкий манршулятор работает следующим образом,
Подается давление в одну из трубок 2, гибкий манипулятор плавно изгибается в .противоположную от трубки сторону. Если подается одинаковое давление одновременно во все трубки гибкий манипулятор удлиняется без изгиба. При этом гибкий элемент 3, расположенный в центральных отверстиях диков, мягко обхватывается гибкими трубками 2, при манипулировании плавно изгибается и не контактирует с краями дисков 1, что особенно важно, если гибкий элемент 35 например световод или воздуховод, не допускает сконцентрированной механической нагрузки ил резких перегибов.
Перемещение гибкого элемента 3 относительно гибкого манипулятора
5
0
5
0
5
0
производится след /ющим образом, Дав- .пение подается в средние бив крайний 4 модули гибкого модулятораS при этом крайний модуль 4 зажимает гибкий элемент Зд а сре.цние модули помещают на величину шага в осевом направлении крайний -1одуль 4 с зажатым гибким элементом 3, после чего давление подается в другой крайний модуль 5, а в крайнем 4 и средних 6 модулях давление сбрасывается.
Далее указанные примеры повторяются ,
Формула изобретения
1,Гибкий манипулятор, содержащий диски с центральным отверстием для гибкого э.пементй, эластичные емкости, расположенные между дисками симметрично относительно гибкого элемента и связанные с индивидуальными источниками подвода энергоносителя, отличающийся тем, что,
с целью расширения технологических возможностей за счет обеспечения возможности взаимного осевого перемещения дисков, эластичные емкости выполнены в виде гибких трубок, последовательно огибающих диски с наружной и внутренней стороны,
2.Манипулятор поп, 1j о т л и - чающийся тем, что для осевого перемещения гибкого элемента он состоит по крайней мере из трех модулей, каждый из которых включает не менее трех дисков, при этом для крайних модулей манипулятора
d,
D
цн
.-+ 2 b
тр
5
0
где D
Ъ
ЦК
гр
диаметр центрального отверстия дисков крайних модулей манипулятора j диаметр гибкого элемента; размер трубок в диаметральном сечении модуля при отсутствии давления рабочей средь;, а для среднего модуля манипулятора
2
П
цс
d,, Тр.
где D
цс
5
тр.
диаметр центрального отверстия дисков среднего МОДУ.ПЯ манипулятора; размер трубок под давлением рабочей среды в диаметральном сечении модуля.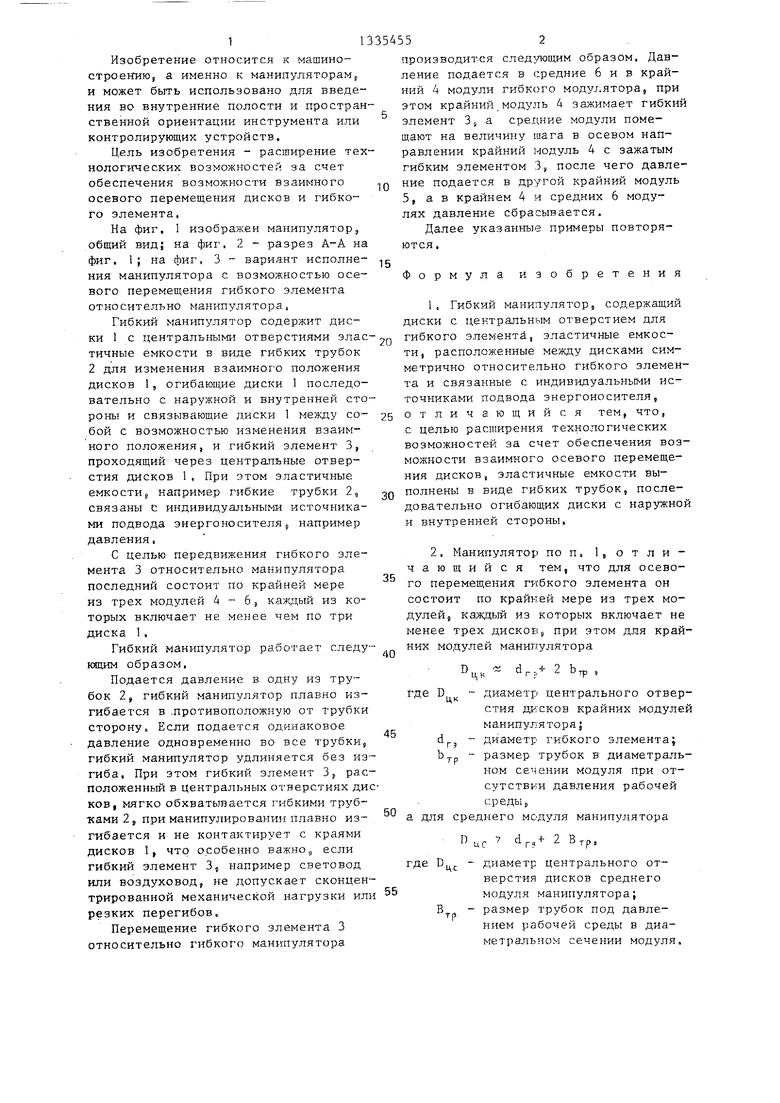
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| ГОРИЗОНТАЛЬНЫЙ БЕСШАБОТНЫЙ МОЛОТ | 2000 |
|
RU2200072C2 |
| "Движитель судна "Валентина" | 1990 |
|
SU1813672A1 |
| Устройство для выгрузки сыпучих грузов из железнодорожных вагонов | 1990 |
|
SU1813689A1 |
| Рука манипулятора | 1984 |
|
SU1332690A1 |
| УСТРОЙСТВО ДЛЯ ГИДРОСТАТИЧЕСКОГО ПРЕССОВАНИЯ ИЗ ПОРОШКА ТОНКОСТЕННЫХ ТРУБОК | 2004 |
|
RU2245219C1 |
| Вибратор | 2019 |
|
RU2716356C1 |
| КОЛЕСО-РЕЗЕРВУАР ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1969 |
|
SU240594A1 |
| Вакуумный манипулятор | 1985 |
|
SU1301602A1 |
Изобретение относится к машиностроению, а именно к манипуляторам, и может 5ыть использовано для введения во внутренние полости и пространственной ориентации инструмента или контролирующих устройств. Целью изобретения является расширение технологических возможностей за счет обеспечения возможности взаимного осевого перемещения дисков и гибкого. элемента, Для зтого диски 1 с центральными отверстиями огибаются гибкими трубками 2 последовательно с наружной и внутренней сторон, а гибкий элемент 3 проходит через центральные отверстия зтих дисков. При подаче давления в одну из трубок 2 гибкий манипулятор плавно изгибается в противоположную от трубки сторону. Перемещение гибкого элемента 3 относительно гибкого манипулятора осуществляется при подаче давления в средние модули бив краний модуль 4, при этом {срайний модуль 4 зажимает гибкий элемент 3, а в середние модули перемещают на величину шага в осевом направлении крайний модуль 4 с зажатым гибким элементом. I з.п. ф-лы, 3 ил. 3 с (Л 00 со ел 4 сл ел
| Манипулятор Тенгиза | 1981 |
|
SU1024264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
