Предлагаемое изобретение относится к машиностроению, в частности, к конструкциям рабочих органов промышленных роботов и манипуляторов, работающих в герметизированном объеме и используемых в технологических процессах изготовления электронных приборов, обработки радиоактивных, токсичных и взрывчатых веществ, а также для осуществления работ в высоком вакууме, в открытом космосе и медицине.
Известны конструкции захватов, принцип действия которых основан на использовании для перемещения ведомого элемента сил статического трения или упругого деформирования одного или нескольких последовательно соединенных и определенным образом ориентированных друг относительно друга элементов, представляющих собой гибкие трубки «Бурдона» (1). В конструкциях этих захватов полностью исключены люфты, зазоры и кинематические пары трения движения. Они не требуют смазки и хорошо работают в условиях сухого трения в высоком вакууме, при этом сохраняется стерильность вакуумированного объема, стабильность параметров качественных характеристик рабочей среды, определяющей себестоимость, объемы и качество выпускаемой продукции.
Недостатком известных захватов является то, что они требуют применения для их обслуживания сложного оборудования: гидравлических и пневматических систем, контрольно-измерительной аппаратуры, что обуславливает их высокую стоимость и высокие массогабаритные показатели.
Наиболее близким по технической сущности и достигаемому изобретению (прототипом) является захват манипулятора, содержащий корпус и шарнирно установленные на нем губки. Губки связаны с корпусом посредством разнообразных кинематических пар и соединений (2).
Недостатком прототипа является то, что из-за наличия кинематических пар трения, он характеризуется низкой надежностью и, кроме того, выделяемые при его работе продукты износа загрязняют рабочую среду, что отрицательно сказывается на качестве продукции, особенно, при получении сверхчистых материалов, например, полупроводников. Низкая надежность прототипа связана с тем, что захваты манипуляторов, как правило, работают в экстремальных условиях, которые и обуславливают усиленный износ контачащих поверхностей пар трения. Так при работе кинематических пар трения в вакууме характерным является снижение точности, потеря кинематических подвижностей, появление добавочных напряжений и деформаций. Все это связано со сложными процессами разрушения, возникающими в зонах контакта поверхностей трения, обусловленными повышением в вакууме адгезии, увеличением коэффициента трения.
Целью предлагаемого изобретения является повышение качества выпускаемой продукции и повышение надежности конструкции за счет исключения из конструкции пар трения.
Поставленная цель достигается тем, что в захвате манипулятора, содержащем корпус, губки, подвижно связанные с корпусом, согласно изобретению подвижная связь каждой губки с корпусом образована установленными крест-накрест пружинами, закрепленными на наклонных гранях, выполненных на обращенных друг к другу сторонах губок и корпуса.
Кроме того, предложено изготовление пружин из материала с памятью формы.
Отличительные от прототипа признаки являются существенными, так как каждый из них необходим, а все вместе с ограничительными достаточны для достижения поставленной цели.
Выполнение подвижных связей губок с корпусом в виде пружин, жестко закрепленных на губках и корпусе, обеспечивает повышение надежности захвата, так как подобная подвижная связь не содержит кинематических пар трения, при работе которых из-за разрушения в экстремальных условиях трущихся поверхностей возможны заклинивания. Характерные для кинематических пар трения люфты, зазоры, также снижают надежность прототипа. Заявляемое исполнение подвижной связи губок и корпуса позволяет удерживать и перемещать образец за счет сил статического трения и упругого деформирования. Отсутствие трущихся поверхностей и, как следствие, отсутствие продуктов износа исключает загрязнение обрабатываемых образцов, то есть обеспечивает повышение качества получаемой продукции. Установка пружин крест-накрест также способствует повышению надежности захвата, так как повышает жесткость подвижной связи губки-корпус при сохранении ее упругих свойств. Крепление пружин на наклонных гранях, выполненных на обращенных друг к другу сторонах губок и корпуса, также способствуют повышению надежности, поскольку позволяют исключить установочные перегибы.
Изготовление пружин из материала с памятью формы позволяет осуществлять дистанционное управление разведением и сведением губок. Благодаря этому исключаются усилия, действующие со стороны образцов на губки при захвате и освобождении образцов. Таким образом, этот признак также повышает надежность.
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решения в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что свидетельствует о соответствии критерию «существенные отличия».
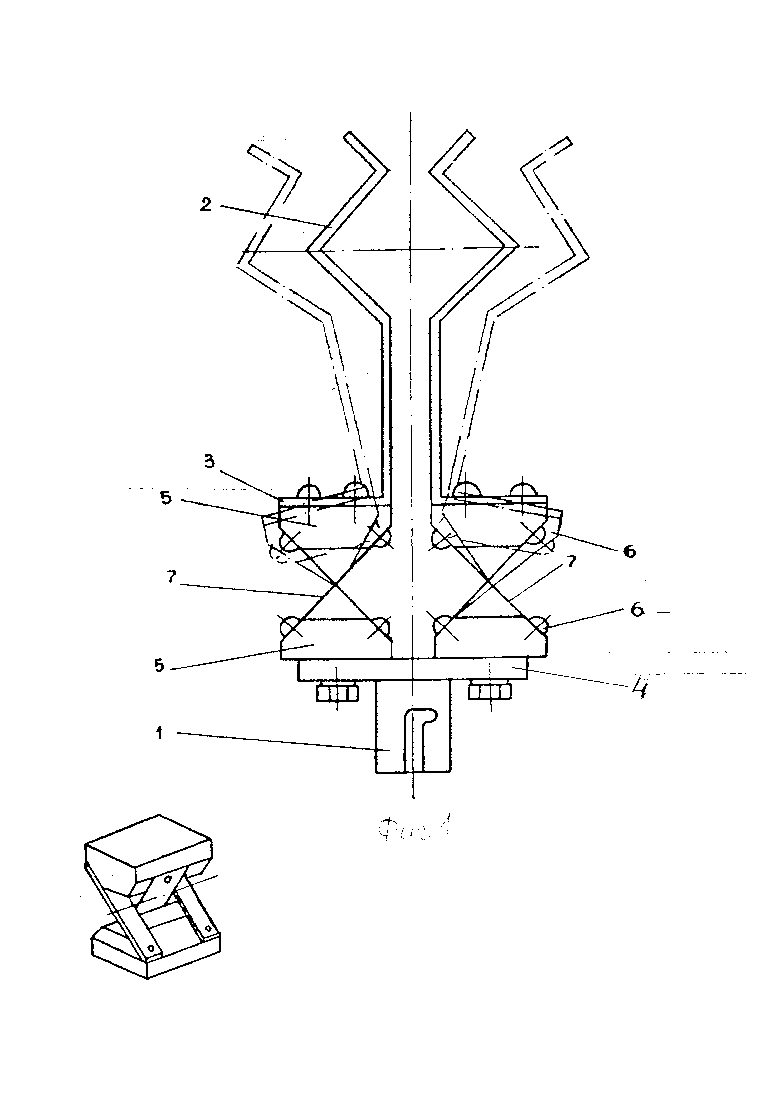
На чертеже изображен общий вид заявляемого захвата.
Захват содержит корпус 1 и подвижно связанные с ним губки 2. Губки 2 выполнены с крепежными полками 3, а корпус 1 с крепежной площадкой 4. К крепежным точкам 3 со стороны корпуса 1 и к крепежной площадки 4 со стороны губок 2 привинчены промежуточные крепежные элементы 5. Промежуточные крепежные элементы 5 выполнены с наклонными гранями центральными и периферийными, к которым винтами 6 привинчены плоские пружины 7. Причем крепление пружин 7 осуществлено таким образом: у одной пружины один конец закреплен на центральной грани промежуточного крепежного элемента 5 губки 2, а другой конец - на периферийной грани промежуточного крепежного элемента 5 корпуса 1. У другой же пружины этой пары один конец закреплен на периферийной грани промежуточного крепежного элемента губки, а другой на центральной части промежуточного крепежного элемента корпуса 1. Таким образом, в каждой подвижной связи губки 2 с корпусом 1 плоские пружины 7 установлены крест-накрест. Пружины 7 могут быть изготовлены из пружинной стали или из нитинола. При изготовлении пружин 7 из нитинола они соединены с нагревателями (на чертеже не показано). А сами пружины 7 предварительно были подвергнуты дополнительной обработке. При температуре выше мартенситного превращения им была придана дугообразная форма. А при температуре ниже мартенситного превращения была придана линейная форма. Пружины 7 из нитинола крепят так, чтобы выпуклость высокотемпературной формы была обращена к центру захвата.
В зависимости от материала, из которого изготовлены плоские пружины 7, работа захвата имеет свои особенности.
Если пружины 7 изготовлены из пружинной стали, то захват сначала подводят к образцу, установленному в кассете, до соприкосновения с ним губок 2. При этом образец центрируется в расширяющейся входной части захвата. Затем на захват подают осевое усилие, под действием которого зафиксированный в кассете образец разводит губки 2, заходит между ними. После чего под действием сил упругости пружин 7 губки 2 сходятся, охватывая образец. Удержание образца осуществляется за счет сил статического трения и усилий упругого деформирования пружин 7. Более надежный захват образцов достигается при выполнении последний с заплечиками (или уступами), опирающимися при обработке образцов на кромки губок 2. После захвата образцов с ними осуществляют все необходимые операции. Освобождение образцов проводят в обратной последовательности. Образец устанавливают в кассету. Затем придавая захвату осевое усилие, направленное от кассеты, начинают отводить его. При этом образец разводит губки 2 и выходит из захвата.
При изготовлении пружин из нитинола. Для захвата образца включают нагрев этих пружин. При достижении температуры мартенситного превращения пружины принимают дугообразную форму и разводят губки 2. Разведенные губки устанавливают на образец и отключают нагреватель. По мере остывания ниже температуры мартенситного превращения пружины 7 принимают прямолинейную форму и сводят губки 2. Для разведения губок 2 и освобождения образца осуществляют нагрев пружин 7.
Преимущества заявляемого захвата по сравнению с прототипом выражаются в более высокой надежности конструкции и о повышении качества выпускаемой продукции. Эти преимущества обусловлены тем, что предлагаемый захват не содержит кинематических пар трения, ненадежных при работе в экстремальных условиях и выделяющих продукты износа, загрязняющие выпускаемую продукцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2018 |
|
RU2706904C1 |
| Захват манипулятора | 2018 |
|
RU2686167C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Перемешивающее устройство | 2018 |
|
RU2685096C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| МАНИПУЛЯТОР | 2019 |
|
RU2722505C1 |
Изобретение относится к конструкциям рабочих органов промышленных роботов и манипуляторов, работающих в герметизированном объеме и используемых в технологических процессах изготовления электронных приборов, обработки радиоактивных, токсичных и взрывчатых веществ, а также для осуществления работ в высоком вакууме, в открытом космосе и медицине. Захват манипулятора содержит корпус и губки, подвижно связанные с корпусом. Подвижная связь каждой губки с корпусом образована установленными крест-накрест пружинами, закрепленными на наклонных гранях, выполненных на обращенных друг к другу сторонах губок и корпуса. При этом пружины изготовлены из пружинной стали. Пружины могут быть изготовлены из нитинола и соединены с нагревателями. Изобретение обеспечивает повышение надежности конструкции захвата. 2 н.п. ф-лы, 1 ил.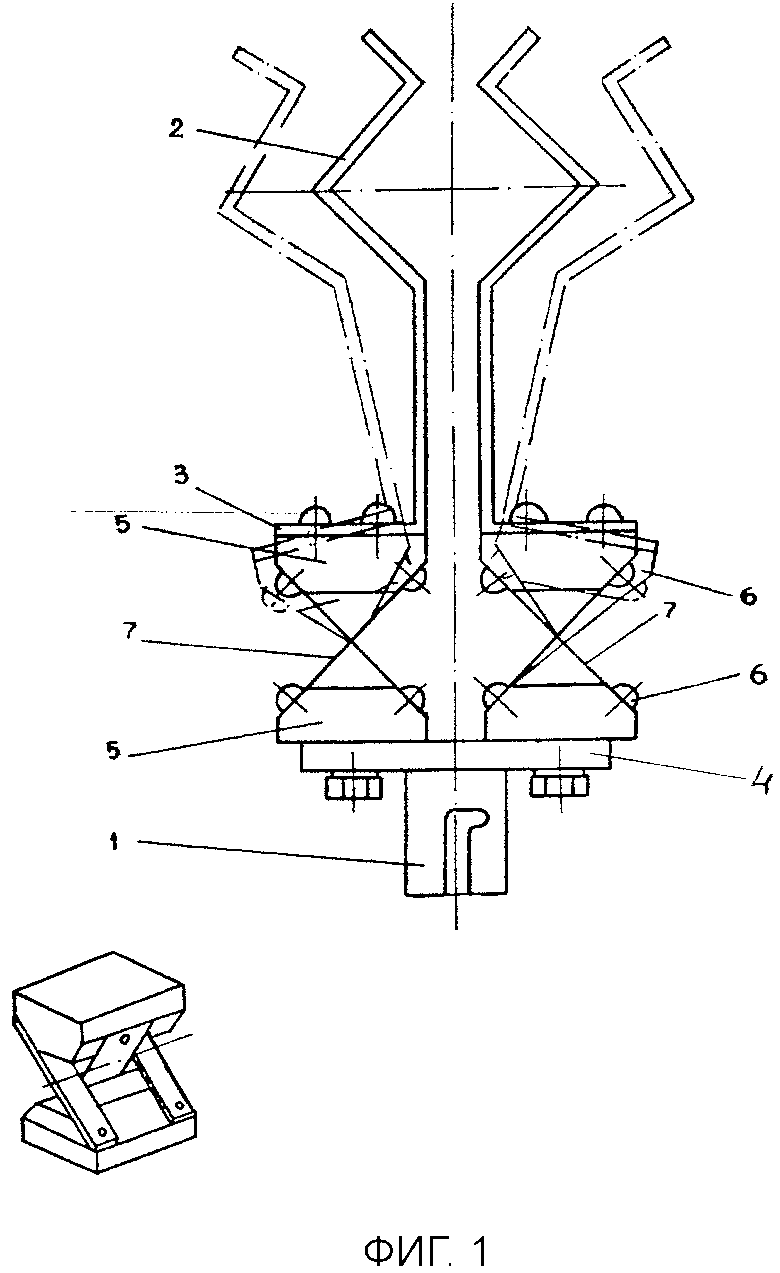
1. Захват манипулятора, работающего в герметизированном объеме, содержащий корпус и губки, подвижно связанные с корпусом, отличающийся тем, что подвижная связь каждой губки с корпусом образована установленными крест-накрест пружинами, закрепленными на наклонных гранях, выполненных на обращенных друг к другу сторонах губок и корпуса, при этом пружины изготовлены из пружинной стали.
2. Захват манипулятора, работающего в герметизированном объеме, содержащий корпус и губки, подвижно связанные с корпусом, отличающийся тем, что он снабжен нагревателями, при этом подвижная связь каждой губки с корпусом образована установленными крест-накрест пружинами, закрепленными на наклонных гранях, выполненных на обращенных друг к другу сторонах губок и корпуса, а пружины изготовлены из нитинола и соединены с нагревателями.
| Копирующий манипулятор | 1974 |
|
SU517482A1 |
| Схват для сборки радиодеталей | 1979 |
|
SU812568A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| WO 2014078388 A1, 22.05.2014. | |||

