Предлагаемое изобретение относится к машиностроению, в частности, к конструкциям промышленных роботов и манипуляторов, работающих в герметизированном объеме и может быть использовано в технологических процессах изготовления электронных приборов, обработки радиоактивных, токсичных и взрывчатых веществ, осуществляемых в высоком вакууме, а также для проведения ряда дистанционных работ, осуществляемых в открытом космосе, под водой и в медицине.
Известны конструкции захватов, содержащих один или несколько определенным образом ориентированных друг относительно друга элементов, представляющих собой гибкие трубки «Бурдона» (А.Т. Александрова «Новые способы передачи и формирования движения в вакууме», М. Высшая школа, 1979 г., с. 25-45).
В конструкциях этих захватов полностью исключены люфты, зазоры, кинематические пары трения. Они не требуют смазки и хорошо работают в высоком вакууме. При этом сохраняют стерильность вакуумированного объема, стабильность качественных характеристик рабочей среды, определяющей качество выпускаемой продукции.
Недостатком известного захвата является то, что он требует для обслуживания сложного оборудования: гидравлических и пневматических систем, контрольно-измерительной аппаратуры, что увеличивает себестоимость выпускаемой продукции. Кроме того, этот манипулятор громоздкий и имеет небольшую зону обслуживания.
Наиболее близким по технической сущности к предполагаемому изобретению (прототипом) является захват манипулятора, содержащий корпус, на котором шарнирно установлена пара губок, связанных с корпусом шарнирно-рычажной системой и кулачковым механизмом (а.с. СССР №963849 М.кл.4 В25J 15/00).
Недостатком прототипа является низкая надежность конструкции, невысокая стабильность качественных характеристик рабочей среды, в которой он работает, что приводит к низкому качеству выпускаемой продукции. Действительно, при работе данным захватом в герметизированную, вакуумированную камеру вводятся пары трения шарнирно-рычажной системы и кулачкового механизма. Эти пары трения при работе выделяют продукты износа, нарушая стерильность вакуумированной камеры и. следовательно, снижая стабильность качественных параметров характеристик рабочей среды.
Кроме того, преобразование движений в рабочем объеме связано с введением в схемы исполнительных механизмов кинематических пар и соединений, работающих в условиях сухого трения. Работа кинематических пар в вакууме характеризуется низкой надежностью, понижением точности, потерей числа кинематических подвижностей, появлением добавочных напряжений и деформаций, которые являются следствием сложных процессов разрушения, возникающих в зонах контакта поверхностей трения. Известно также, что высокий вакуум влияет на свойства материалов. Так у материалов повышается адгезия (сцепления, увеличивается коэффициент трения).
Целью предполагаемого изобретения является повышение качества выпускаемой продукции за счет повышения надежности конструкции захвата и обеспечения стабильности качественных характеристик рабочей среды.
Поставленная цель достигается тем, что захват манипулятора, содержащий корпус с шарнирно установленной на нем парой губок, согласно изобретению снабжен дополнительной парой губок, шарнирно закрепленных на корпусе, причем пары губок установлены взаимоперпендикулярно, торцы губок выполнены с уклоном к центральной оси захвата, а каждый шарнир образован двумя параллельными плоскими пружинами центральной и периферийной, периферийные пружины закреплены одним концом на внешних гранях губок, а другим на корпусе, центральные пружины закреплены одним концом на внутренних гранях губок, а другим на шток, пропущенным через осевое отверстие корпуса.
Выполнение шарниров в виде плоских пружин, установленных параллельно друг другу и жестко закрепленных на губках, корпусе и штоке, позволяет повысить надежность конструкции захвата, так как подобный шарнир не имеет люфтов, зазоров и кинематических пар трения, как имеет место в прототипе, и позволяет удерживать и перемещать образец за счет сил статического трения и упругого деформирования (нет сухого трения). Отсутствие трущихся поверхностей и, как следствие, отсутствие продуктов трения позволяет стабилизировать качественные характеристики рабочей среды, улучшая качество продукции. Установка пар губок взаимоперпендикулярно, выполнение торцов губок с уклоном к оси захвата, снабжение захвата штоком, жестко связанным с центральными пружинами, обеспечивают надежный захват образцов круглой, цилиндической, призматической, конической формы.
Таким образом, отличительные признаки необходимы для достижения поставленной цели, то есть являются существенными.
Сравнение отличительных от прототипа признаков с другими известными техническими решениями свидетельствует о том, что выполнение торцов губок с уклоном к центру захвата известно в а.с. СССР №1227465 В25J 15/00. Известна также установка губок на упругих лентах, связанных со штоком, при перемещении которого губки сдвигаются (а.с. СССР №916301 В25J 15/02. 1980 г.
Установка пар губок взаимоперпендикулярно для осуществления более надежного захвата предусмотрено в конструкции захвата манипулятора по а.с. СССР №666074 В25J 15/02.
Выполнение же шарниров в виде двух параллельных плоских пружин: центральной и периферийной, соединения периферийных пружин одним концом с внешними гранями губок, а другим с корпусом, а также соединения центральных пружин одним концом с внутренними гранями губок, а другим со штоком в исследованных аналогах не обнаружено. Заявляемое выполнение шарниров обеспечивает удержание образца за счет сил упругой деформации пружин.
Хотя в захвате манипулятора по а.с. СССР №916301 губки установлены на пружинах, связанных со штоком, но пружины выполнены λ-образной формы, и образец удерживается не за счет сил упругости, а за счет внешних усилий, прилагаемых к среднему перегибу пружины через подвижный шток, и сводящих крайние перегибы пружин друг к другу. Сходящиеся крайние перегибы сдвигают губки, которые захватывают образец. После снятия внешних усилий λ-образная пружина за счет сил упругости возвращается в исходное положение и закрепленные на крайних перегибов губки освобождают образец.
Таким образом, в известном захвате силы упругости пружины направлены на раздвижение губок. Для захвата образца необходимо прикладывать длительное время усилие, достаточное для компенсации сил упругости пружин и удержания образца. В заявленном же захвате силы упругости пружин направлены на сдвижение губок, то есть на удержание образца. Следовательно, для известного выполнения захвата по сравнению с предлагаемым характерны более высокие энергозатраты. Из изложенного вытекает, что предполагаемое изобретение отвечает критерию «существенные отличия».
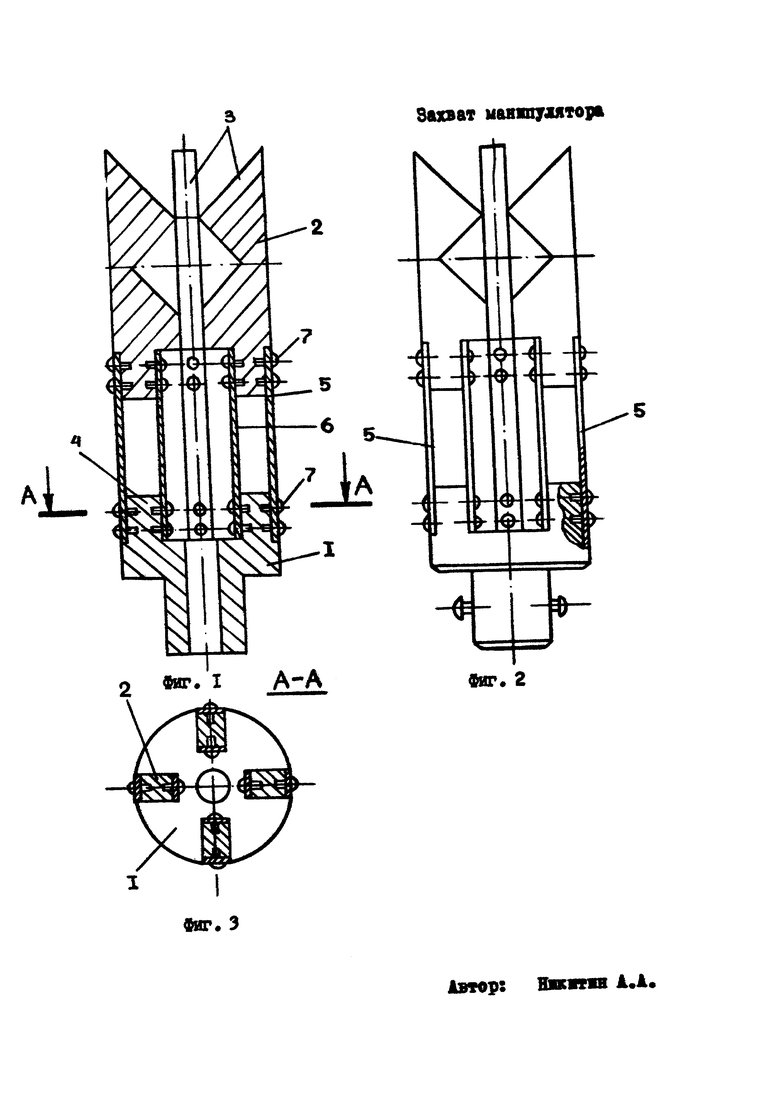
На фиг. 1 изображен продольный разрез захвата, на фиг. 2 - общий вид, на фиг. 3 - поперечный разрез А-А.
Захват манипулятора содержит корпус 1 с шарнирно установленными на нем губками 2, расположенными попарно. Причем одна пара губок установлена перпендикулярно другой паре. Торцы губок 2 выполнены с уклонами 3 к центральной оси захвата. Наружные грани губок 2 соединены с выступами 4 корпуса 1 посредством периферийных пружин 5. Внутренние грани губок 2 соединены со штоком 6 посредством центральных пружин 7.
Пружины 5 и 7 изготовлены из пружинной стали. Концы пружин прикреплены к губкам 2, выступам 4 и штоку 6 винтами. Свободный конец штока снабжен резьбой, на которую навинчена опорная пята 8.
Захват манипулятора работает следующим образом.
При соприкосновении с образцом благодаря наличию уклонов 3 происходит центрирование образца. Затем нажатием на опорную пяту 8 перемещают шток 6, при этом пружины 7 разводят губки 2. При разведенных губках осуществляется захват образца. После захвата снимают усилие с пяты 8. Шток 6 возвращается в исходное положение. Губки 2 под действием сил упругости пружин 5 и 7 сводятся. Удержание образца осуществляется за счет сил статического трения и упругого деформирования пружин 5 и 7.
Технические преимущества заявляемого объекта по сравнению с прототипом, заключаются в повышении надежности конструкции захвата и обеспечении стабильности качественных характеристик рабочей среды, в которой работает захват, что улучшает качество выпускаемой продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2018 |
|
RU2706904C1 |
| Захват манипулятора | 2018 |
|
RU2697290C2 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2720514C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2722505C1 |
Изобретение относится к захвату манипулятора. Захват содержит шток и корпус с шарнирно установленными на нем диаметрально расположенными парами губок. Шарниры образованы параллельными плоскими пружинами – периферийными и центральными. Одним концом пружины соединены с губками, другой конец у периферийных пружин прикреплен к корпусу, а у центральных пружин - к штоку. В результате повышается надежность захвата. 3 ил.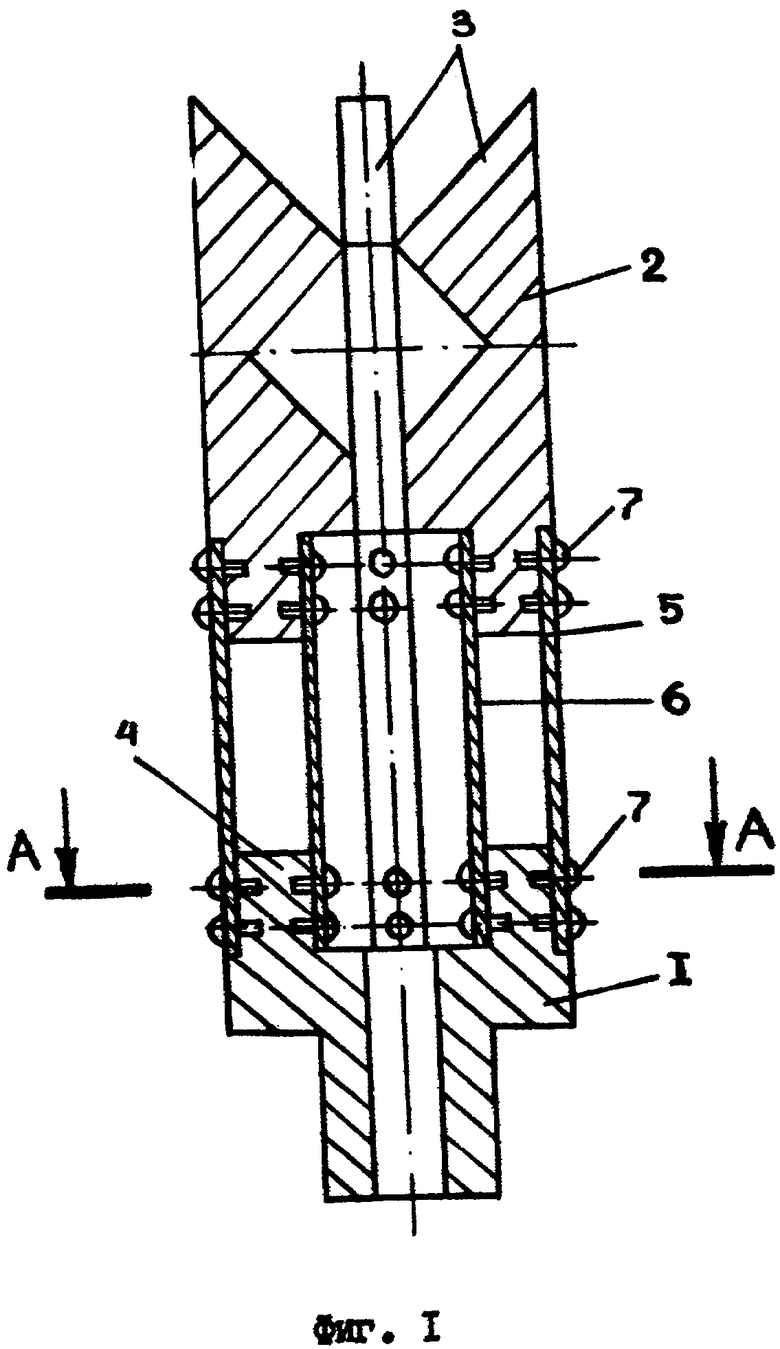
Захват манипулятора, содержащий корпус с шарнирно установленной на нем парой губок, отличающийся тем, что он снабжен дополнительной парой губок, шарнирно закрепленных на корпусе, причем пары губок установлены взаимоперпендикулярно, торцы губок выполнены с уклоном к центральной оси захвата, а каждый шарнир образован двумя параллельными плоскими центральной и периферийной пружинами, при этом периферийные пружины закреплены одним концом на внешних гранях губок, а другим – на корпусе, причем центральные пружины закреплены одним концом на внутренних гранях губок, а другим – на штоке, пропущенном через осевое отверстие корпуса.
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Захват манипулятора | 1988 |
|
SU1516345A2 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Захват | 1977 |
|
SU667396A1 |
| US 3765545 A1, 16.10.1973. | |||

