Изобретение касается системы для определения местоположения трубопроводов с помощью по меньшей мере одного внутритрубного инспекционного геоприбора (внутритрубный инспекционный снаряд/ скребок/поршень), который вводится в трубопровод, продвигается в нем и имеет магнитный источник для создания магнитного поля.
Местоположение подземных трубопроводов, таких как магистральные трубопроводы для газа, нефти, воды и пр. должно быть с высокой точностью известно для инспекционных задач, обычно эти магистральные трубопроводы и, в частности, местоположение их верхней кромки после прокладки и восстановления грунта больше не могут просматриваться снаружи.
При новой прокладке магистральных трубопроводов во время прокладки, то есть перед повторной насыпкой грунта, они замеряются современными методами с кадастровой точностью. Более старые фонды магистральных трубопроводов при прокладке в прошлом, в отличие от этого, не регистрировались с достаточной точностью. К тому же из-за нестабильных подпочв, таких как, напр., топи, пустынный песок и пр. может случиться, что местоположение магистрального трубопровода в подпочве, в которую он заделан, изменится.
Из уровня техники известны методы локализации магистрального трубопровода или, соответственно, его металлической структуры в грунте.
Это происходит близко к поверхности земли, например, посредством ручных измерительных приборов, которые продаются CORROCONT Group (http://www.corrocont.com/surveys/pipeline-locating-and-depth-measurement), что способствует передаче введенного измерительного сигнала и вместе с тем чувствительности измерения.
Также известные способы внутренней инспекции магистральных трубопроводов используют так называемые внутритрубные инспекционные геоприборы, которые вводятся в магистральные трубопроводы и продвигаются в магистральном трубопроводе потоком транспортируемой среды. Определение положения внутритрубного инспекционного геоприбора осуществляется с помощью инерциальных измерительных систем.
Эти системы обладают тем недостатком, что они имеют дрейф результата измерения, то есть увеличение погрешности вследствие инкрементного определения подачи.
Этот характер погрешностей в отсутствие контакта с внешним миром не может тривиальным образом компенсироваться внешними и вместе с тем абсолютными измерениями, при этом, в частности, указанная, чаще всего металлическая структура магистрального трубопровода представляет собой препятствие, которое мешает передаче беспроводных сигналов (электрических полей) (клетка Фарадея).
Из уровня техники, например, из https://en.wikipedia.org/wiki/Pigging, известны установленные на наружной оболочке магистрального трубопровода акустические, магнитные ил основанные на беспроводной технологии локационные устройства, которые могут обнаруживать прохождение внутритрубного инспекционного геоприбора.
Но этот вид сенсорики именно у плохо замеренных старых фондов отсутствует.
В основе изобретения лежит задача усовершенствовать уровень техники и, в частности, улучшить применение профилемеров для съемки магистральных трубопроводов.
Эта задача решается с помощью системы по п.1 формулы изобретения. Предпочтительные варианты осуществления вытекают из зависимых пунктов формулы изобретения.
Изобретение поясняется подробнее с помощью фигур. В качестве примера показано:
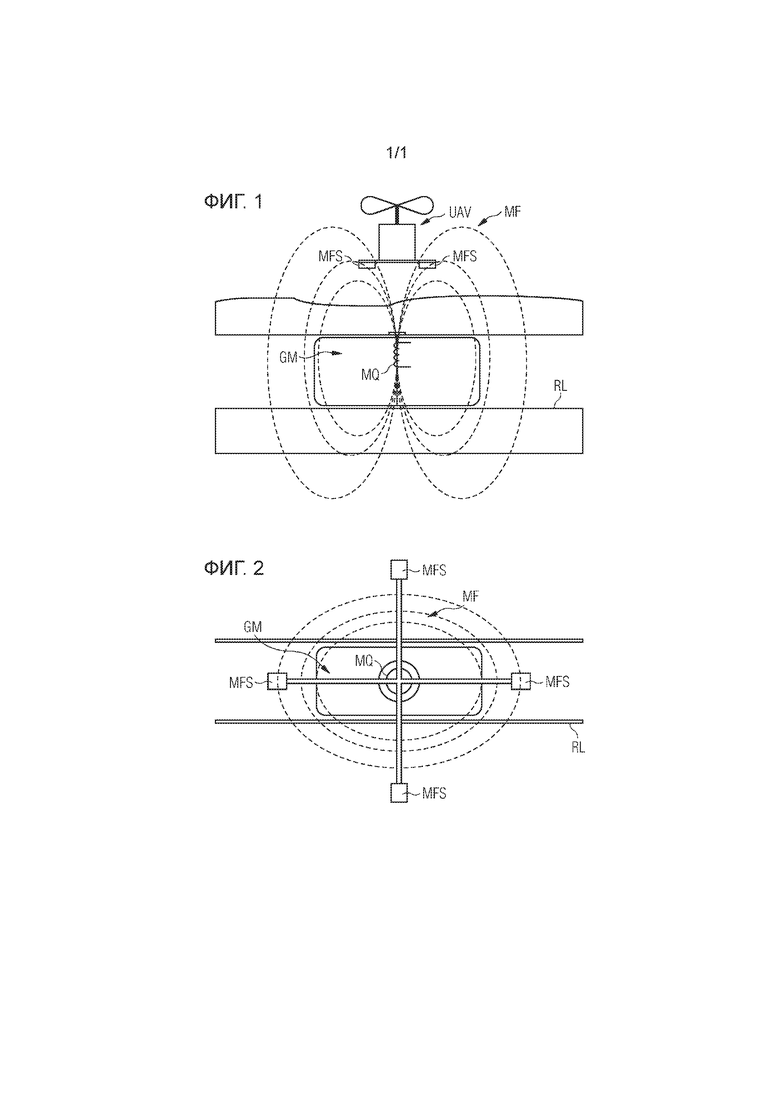
фиг.1: применение предлагаемой изобретением системы на схематичном изображении сбоку;
фиг.2: применение предлагаемой изобретением системы на виде в плане.
На изображениях показано применение внутритрубного инспекционного геоприбора GM для определения местоположения трубопровода RL.
Внутритрубный инспекционный геоприбор GM оснащен магнитным источником MQ, который создает магнитное поле MF. Профиль силы магнитного поля обнаруживается и координируется в пространстве с помощью сенсора MFS магнитного поля, установленного на беспилотном летательном аппарате UAV.
Беспилотный летательный аппарат UAV следует максимуму магнитного сигнала на заданной высоте полета и позиционируется всегда на заданном расстоянии от внутритрубного инспекционного геоприбора GM, например, прямо над ним.
Поэтому при движении внутритрубного инспекционного геоприбора GM в трубопроводе RL беспилотный летательный аппарат UAV также будет следовать ходу трубопровода RL.
Из определенного посредством спутниковой навигации в текущем режиме положения беспилотного летательного аппарата UAV и определенного из профиля сил магнитного поля MF расстояния между внутритрубным инспекционным геоприбором GM и беспилотным летательным аппаратом UAV находятся местоположение и ход трубопровода RL.
При этом целесообразно, когда полученная посредством инерциальных измерительных систем информация о положении внутритрубного инспекционного геоприбора тоже используется в случаях нахождения местоположения и хода трубопровода RL.
В качестве магнитного источника возможны, например, постоянные магниты или магнитные катушки.
Предпочтительно применение катушки, на которую подается переменный ток, в качестве магнитного источника MQ для создания магнитного переменного поля MF, имеющего выраженную сигнатуру частоты, так что становится возможным распознавание сигналов помех.
Для этого целесообразно, когда частота и сила магнитного поля MF адаптируются к свойствам трубопровода RL так, что индуцируемые в них вихревые токи становятся минимальными.
Предпочтительным может быть также вариант осуществления магнитного поля MF в виде постоянного поля, на которое наложено переменное поле, так как проницаемость переменного поля магнитных материалов может улучшаться при наложении постоянного поля, которое производит магнитное насыщение материала в соответствующем месте.
Во избежание магнитного прилипания внутритрубного инспекционного геоприбора к окружающей трубе магнитное постоянное поле должно также проходить внутри трубы как можно более симметрично.
При определении положения внутритрубного инспекционного геоприбора GM целесообразно, когда для этого как положение…
Может быть также предпочтительно оснастить беспилотный летательный аппарат UAV несколькими сенсорами MFS магнитного поля и расположить их крестообразно, как это изображено на фиг.2. При этом локализация внутритрубного инспекционного геоприбора GM и вместе с тем трубопровода RL в латеральном направлении улучшается при обнаружении максимума.
Один из предпочтительных вариантов осуществления изобретения предусматривает, что магнитное поле также одновременно применяется для обнаружения слабых мест в оболочке трубопровода или неравномерностей в лежащих выше областях (напр., «illegal Tapping» (англ. несанкционированные врезки) при установке отводящих трубопроводов).
Возможно было бы также двунаправленное измерение, при этом измеренный зондом MFS магнитного поля сигнал, например, на другой, более низкой частоте посылается обратно во внутритрубный инспекционный геоприбор GM. При этом с помощью надлежащей кодировки на протяжении времени прохождения сигналов может определяться расстояние между беспилотным летательным аппаратом UAV и внутритрубным инспекционным геоприбором GM.
Альтернативно возможно было бы также измерение расстояния путем сравнения положения фаз сигналов.
Преимущества, достигаемые с помощью предлагаемой изобретением системы, заключаются, в частности, в высокой точности определения положения внутритрубного инспекционного геоприбора GM, прежде всего, у сравнительно длинных трубопроводов RL путем устранения характерного дрейфа инкрементного измерения посредством инерциальной измерительной системы.
При этом во внутритрубном инспекционном геоприборе GM могут также находить применение сравнительно простые и экономичные измерительные системы.
Эта система позволяет также полностью автоматизировать измерительный процесс.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
GM Внутритрубный инспекционный геоприбор
UAV Беспилотный летательный аппарат
RL Трубопровод
MF Магнитное поле
MFS Сенсор магнитного поля
MQ Магнитный источник.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2017 |
|
RU2721450C1 |
| Бесконтактный дефектоскоп трубопроводов | 2024 |
|
RU2832369C1 |
| СПОСОБ ИСПЫТАНИЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО ПРИБОРА НА КОЛЬЦЕВОМ ТРУБОПРОВОДНОМ ПОЛИГОНЕ | 2012 |
|
RU2526579C2 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| Способ проведения внутритрубной диагностики в подвижной жидкостной пробке | 2017 |
|
RU2650621C1 |
| Способ определения пространственного положения трубопровода | 2020 |
|
RU2747385C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 1999 |
|
RU2148808C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР С ИСПОЛЬЗОВАНИЕМ ВИХРЕТОКОВЫХ ДАТЧИКОВ | 2021 |
|
RU2772075C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
Изобретение относится к области определения местоположения трубопроводов. Система для определения положения трубопроводов с помощью по меньшей мере одного внутритрубного инспекционного геоприбора, который вводится в трубопровод, продвигается в нем и имеет магнитный источник для создания магнитного поля, при этом предусмотрен по меньшей мере один беспилотный летательный аппарат, имеющий сенсоры магнитного поля и устройства для определения положения, и предусмотрены средства управления для определения профиля силы магнитного поля и для позиционирования беспилотного летательного аппарата на заданном расстоянии от внутритрубного инспекционного геоприбора и средства для определения положения внутритрубного инспекционного геоприбора из положения беспилотного летательного аппарата и с заданного расстояния между внутритрубным инспекционным геоприбором и беспилотным летательным аппаратом. Технический результат – повышение точности определения положения трубопровода. 5 з.п. ф-лы, 2 ил.
1. Система для определения положения трубопроводов (RL) с помощью по меньшей мере одного внутритрубного инспекционного геоприбора (GM), который вводится в трубопровод (RL), продвигается в нем и имеет магнитный источник (MQ) для создания магнитного поля (MF), отличающаяся тем, что предусмотрен по меньшей мере один беспилотный летательный аппарат (UAV), имеющий сенсоры (MFS) магнитного поля и устройства для определения положения, и предусмотрены средства управления для определения профиля силы магнитного поля (MF) и для позиционирования беспилотного летательного аппарата (UAV) на заданном расстоянии от внутритрубного инспекционного геоприбора (GM) и средства для определения положения внутритрубного инспекционного геоприбора (GM) из положения беспилотного летательного аппарата (UAV) и с заданного расстояния между внутритрубным инспекционным геоприбором (GM) и беспилотным летательным аппаратом (UAV).
2. Система по п.1, отличающаяся тем, что устройства определения положения беспилотного летательного аппарата (UAV) включают в себя средства спутниковой навигации.
3. Система по п.1 или 2, отличающаяся тем, что указанный по меньшей мере один внутритрубный инспекционный геоприбор (GM) продвигается в трубопроводе потоком транспортируемой среды.
4. Система по одному из пп.1-3, отличающаяся тем, что из последовательности найденных положений движущегося внутритрубного инспекционного геоприбора (GM) определяется положение трубопровода.
5. Система по одному из пп.1-4, отличающаяся тем, что в качестве магнитного источника (MQ) предусмотрена катушка, на которую подается переменный ток, и что переменный ток имеет характерный и распознаваемый частотный шаблон.
6. Система по одному из пп.1-4, отличающаяся тем, что в качестве магнитного поля (MF) предусмотрено постоянное поле, на которое наложено переменное поле.
| US 4427943 A, 24.01.1984 | |||
| Johannes B | |||
| Stoll: UNMANNED AIRCRAFT SYSTEMS FOR RAPID NEAR SURFACE GEOPHYSICAL MEASUREMENTS | |||
| International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-1/W2, 2013 UAV-g2013, 4-6 September 2013, Rostock, Germany | |||
| Ситценабивная машина | 1922 |
|
SU391A1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2012 |
|
RU2503038C1 |
| WO 2014189943 A1, | |||

