Группа изобретений относится к области посадки летательных аппаратов (ЛА) на основе спутниковых радионавигационных систем (СРНС) ГЛОНАСС, GPS и может найти применение для оснащения необорудованных радиомаячными посадочными средствами аэродромов и вертолетных площадок, в том числе, для повышения надежности посадки.
Для осуществления посадки ЛА, включая заход на посадку, требуется высокая точность местоопределения (МО).
Одним из способов обеспечения высокоточного МО в СРНС является совместное применение информации, поступающей от навигационных искусственных спутников Земли (НИСЗ) систем GPS и/или ГЛОНАСС, и корректирующей информации (КИ).
Известна система с применением КИ, в которой использованы псевдослучайные сигналы, аналогичные излучаемым с НИСЗ, закодированные, в том числе, корректирующей информацией [1].
Недостатками системы [1] являются:
- отличие несущей частоты сигналов ПС от стандартной несущей частоты L1 сигналов СРНС, что не позволяет использовать на ЛА стандартные бортовые приемники СРНС;
- отсутствие оптимизации навигационных свойств рабочего созвездия, состоящего из НИСЗ и ПС, что не позволяет достигнуть высокой точности МО.
Более совершенной является система [2]. Она, как и система [1], построена по принципу системы с использованием псевдоспутника, но имеет дополнительное преимущество: навигационные сигналы ПС используются для получения дополнительной псевдодальности, что эквивалентно улучшению геометрических свойств рабочего созвездия.
Система МО с использованием ПС [2] представляет собой спутниковую навигационную систему захода на посадку и посадки летательных аппаратов, которая содержит N НИСЗ, формирующих рабочее созвездие, опорный псевдоспутник (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных приемной антенны, наземного приемника, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика КИ, запускающий вход которого соединен с выходом опорного генератора, выход соединен с входом передающей антенны, а установочный вход вычислителя поправок и второй информационный вход упомянутого передатчика КИ служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с ЛА и с наземным приемником, а передатчик КИ связан информационной связью передача-прием с ЛА.
В системе захода на посадку и посадки [3] дополнительно повышена точность определения псевдодальности за счет введения n дополнительных псевдоспутников (ДПС).
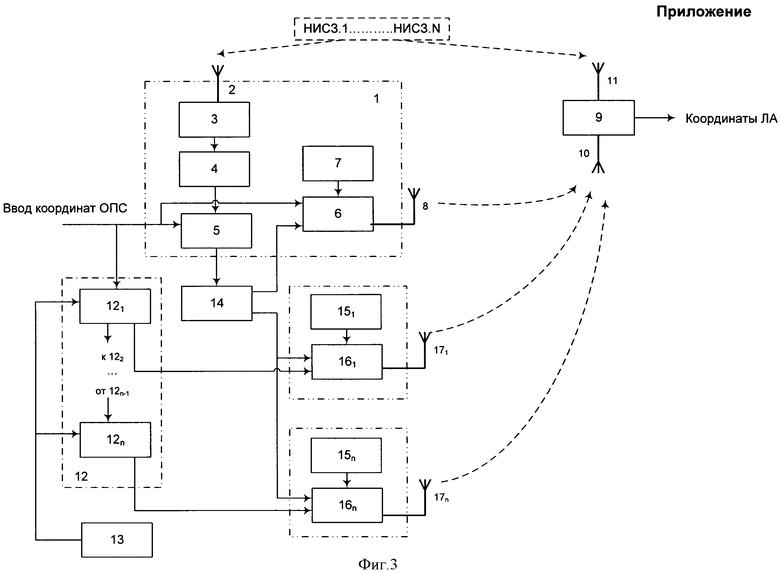
Система захода на посадку и посадки [3] является прототипом заявляемого изобретения. В Приложении (фиг.3) приведена структурная схема системы-прототипа [3]. При описании системы-прототипа проведена корректировка наименований узлов и связей для лучшего согласования с отличительными признаками заявляемой системы. Система - прототип содержит N НИСЗ, формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ на ЛА с бортовой приемной антенной на входе, опорный псевдоспутник, расположенный у взлетно-посадочной полосы и состоящий из последовательно соединенных наземной приемной антенны, наземного приемника сигналов НИСЗ, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика ОПС, запускающий вход которого соединен с выходом опорного генератора, выход упомянутого передатчика ОПС соединен с входом передающей антенны ОПС, а установочный вход вычислителя поправок и второй информационный вход передатчика ОПС служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ и с наземным приемником сигналов НИСЗ, n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика ДПС, выход передатчика ДПС соединен с входом передающей антенны ДПС, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС, вычислитель оптимальных координат ДПС включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС, причем ОПС и ДПС связаны информационной связью передача-прием с бортовым приемником сигналов НИСЗ через передающие антенны ОПС, ДПС и дополнительную бортовую приемную антенну, обращенную в сторону Земли.
Для приема сигналов НИСЗ и ПС в системе-прототипе (см. Приложение (фиг.3)) необходимо создать специализированный двухканальный приемник, один из каналов которого выполняет дифференциальную обработку сигналов НИСЗ, а другой - совместную обработку сигналов НИСЗ и ПС. Так как мощность сигналов ПС всегда выше мощности сигналов НИСЗ, необходимо обеспечить согласование уровней этих мощностей в пределах одного порядка с целью минимизации помех, обусловленных интерференцией сигналов ПС и НИСЗ.
Кроме того, излучаемые ПС сигналы отличаются большим динамическим диапазоном по мощности [4], что при использовании для ПС стандартных сигналов НИСЗ приводит либо к существенному сокращению области действия ПС, либо к снижению точности МО. При приеме спутниковых сигналов отношение сигнал/шум лежит в пределах 30-50 дБГц. Если в точке принятия решения пилотом ЛА, соответствующей высоте 60 метров, уровень сигнала ПС определяется отношением сигнал/шум 50 дБГц, то максимальная наклонная дальность до ПС, при которой отношение сигнал/шум уменьшится до 30 дБГц, составит 600 м. Для сравнения можно привести дальность действия систем посадки метрового диапазона - 46 км. Таким образом, для реализации точностных характеристик системы посадки с использованием ПС необходимо расширить область надежного приема сигналов ПС, что достигается, например, путем ограничения уровня излучаемой мощности сигналов ПС.
В известных системах с ПС такое ограничение излучаемой мощности производится параметрическим способом, путем формирования специальных диаграмм направленности передающих антенн ПС. Формирование подобных антенн описано, например, в [4, 5]. Однако такой способ ограничения мощности является весьма сложным, трудоемким и неточным.
Кроме того, целесообразно обеспечить расширение диапазона по дальности принимаемых сигналов.
Задачей настоящего изобретения является построение системы посадки с ПС, обладающей повышенной надежностью, на основе использования стандартного навигационного приемника сигналов НИСЗ с одновременным приемом на борту ЛА сигналов ПС в широком диапазоне значений дальностей до ЛА.
Поставленная задача решается следующим образом.
Заявляемая спутниковая радионавигационная система содержит N навигационных искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ на летательном аппарате с бортовой приемной антенной на входе, опорный псевдоспутник (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны, наземного приемника сигналов НИСЗ, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика ОПС, запускающий вход которого соединен с выходом опорного генератора, выход упомянутого передатчика ОПС соединен с входом передающей антенны ОПС, а установочный вход вычислителя поправок и второй информационный вход передатчика ОПС служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ и с наземным приемником сигналов НИСЗ, n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика ДПС, выход передатчика ДПС соединен с входом передающей антенны ДПС, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС, вычислитель оптимальных координат ДПС включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС, кроме того, на борту введен ретранслятор, в который входит бортовой приемник сигналов псевдоспутников с обращенной в сторону Земли приемной антенной ретранслятора на входе и (n+1) выходами, (n+1) понижающими преобразователями частоты, (n+1) повышающими преобразователями частоты, (n+1) блоками ограничения мощности, бортовой передатчик преобразованных сигналов псевдоспутников с передающей антенной ретранслятора на выходе и синтезатор частоты с 2 (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников соединены с входами соответствующих понижающих преобразователей частоты, выходы которых соединены с входами соответствующих блоков ограничения мощности, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников, а синтезатор частоты соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты, при этом в качестве бортового приемника сигналов НИСЗ использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной на входе, а ретранслятор связан информационной связью передача-прием с ОПС и ДПС через передающие антенны ОПС, ДПС и приемную антенну ретранслятора и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ через передающую антенну ретранслятора и бортовую приемную антенну.
Предлагается вариант системы с ПС, обладающей расширенным диапазоном дальностей до ЛА по сравнению с описанной выше системой. Прототипом такого варианта системы также является система по патенту [3].
В данном случае спутниковая радионавигационная система содержит N искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ на летательном аппарате с бортовой приемной антенной на входе, опорный псевдоспутник (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны, наземного приемника сигналов НИСЗ, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика ОПС, запускающий вход которого соединен с выходом опорного генератора, выход упомянутого передатчика ОПС соединен с входом передающей антенны ОПС, а установочный вход вычислителя поправок и второй информационный вход передатчика ОПС служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ и с наземным приемником сигналов НИСЗ, n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика ДПС, выход передатчика ДПС соединен с входом передающей антенны ДПС, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС, вычислитель оптимальных координат ДПС включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС, кроме того, на борту введен ретранслятор, в который входит бортовой приемник сигналов псевдоспутников с обращенной в сторону Земли приемной антенной ретранслятора на входе и (n+1) выходами, (n+1) понижающими преобразователями частоты, (n+1) повышающими преобразователями частоты, (n+1) блоками автоматической регулировки мощности, (n+1) блоками ограничения мощности, бортовой передатчик преобразованных сигналов псевдоспутников с передающей антенной ретранслятора на выходе и синтезатор частоты с 2 (n+1) выходами, а также введены вычислитель расстояний от летательного аппарата до каждого псевдоспутника, функциональный преобразователь расстояния в уровень сигнала с (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников соединены с входами соответствующих понижающих преобразователей частоты, выходы которых соединены с входами соответствующих блоков автоматической регулировки мощности, выходы которых соединены с входами соответствующих блоков ограничения мощности, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников, а синтезатор частоты соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты, выход бортового приемника сигналов НИСЗ соединен с первым входом вычислителя расстояний от летательного аппарата до каждого из псевдоспутников, на второй вход которого поступают координаты из бортовой базы данных, выход которого соединен с входом функционального преобразователя расстояния в уровень сигнала, (n+1) выходов которого соединены с управляющими входами соответствующих блоков автоматической регулировки мощности, при этом в качестве бортового приемника сигналов НИСЗ использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной на входе, а ретранслятор связан информационной связью передача-прием с ОПС и ДПС через передающие антенны ОПС, ДПС и приемную антенну ретранслятора и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ через передающую антенну ретранслятора и бортовую приемную антенну.
На фиг.1 и фиг.2 приводятся структурные схемы заявляемых вариантов систем.
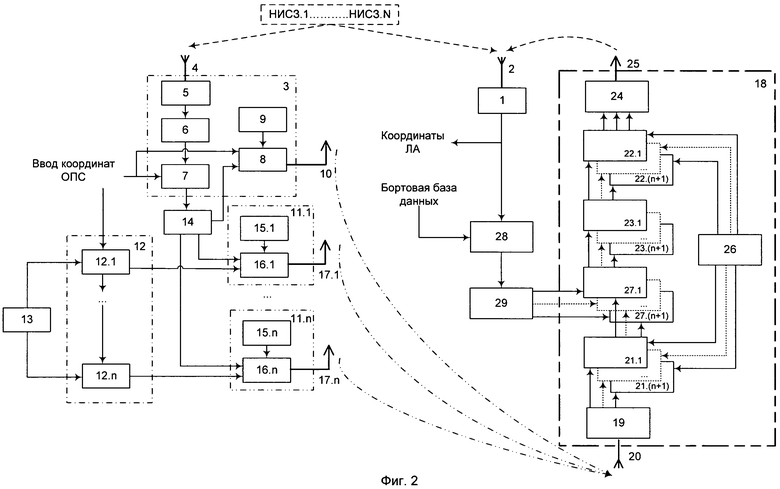
Заявляемый вариант системы в соответствии со структурной схемой фиг.1 содержит N НИСЗ (НИСЗ.1…НИСЗ.N), формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ 1 на летательном аппарате с бортовой приемной антенной 2 на входе, опорный псевдоспутник 3 (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны 4, наземного приемника 5 сигналов НИСЗ, вычислителя измеряемых параметров 6 и вычислителя поправок 7, а также передатчика ОПС 8, запускающий вход которого соединен с выходом опорного генератора 9, выход упомянутого передатчика ОПС 8 соединен с входом передающей антенны ОПС 10, а установочный вход вычислителя поправок 7 и второй информационный вход передатчика ОПС 8 служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ 1 и с наземным приемником сигналов НИСЗ 5, n дополнительных псевдоспутников 11.1…11.n (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС 12, блок информационных параметров аэропорта 13 и распределительный узел 14 с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор 15.1…15.n, выходом соединенный с запускающим входом передатчика ДПС 16.1…16.n, выход передатчика ДПС соединен с входом передающей антенны ДПС 17.1…17.n, распределительный узел 14 соединен входом с выходом вычислителя поправок 7, первым выходом соединен с первым информационным входом передатчика ОПС 8, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС 15, вычислитель оптимальных координат ДПС 12 включает n вычислителей 12.1…12.n, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей 12 соединены с выходом блока информационных параметров аэропорта 13, а первый вход первого вычислителя 12 служит для ввода координат ОПС. В систему введены новые узлы и связи: на борту введен ретранслятор 18, в который входит бортовой приемник сигналов псевдоспутников 19 с обращенной в сторону Земли приемной антенной ретранслятора 20 на входе и (n+1) выходами, (n+1) понижающими преобразователями частоты 21.1…21.(n+1), (n+1) повышающими преобразователями частоты 22.1…22.(n+1), (n+1) блоками ограничения мощности 23.1…23.(n+1), бортовой передатчик преобразованных сигналов псевдоспутников 24 с передающей антенной ретранслятора 25 на выходе и синтезатор частоты 26 с 2 (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников 19 соединены с входами соответствующих понижающих преобразователей частоты 21, выходы которых соединены с входами соответствующих блоков ограничения мощности 23, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты 22, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников 24, а синтезатор частоты 26 соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты 21 и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты 22, при этом в качестве бортового приемника сигналов НИСЗ 1 использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной 2 на входе, а ретранслятор 18 связан информационной связью передача-прием с ОПС 3 и ДПС 11 через передающие антенны ОПС 10, ДПС 17 и приемную антенну ретранслятора 20 и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ 1 через передающую антенну ретранслятора 25 и бортовую приемную антенну 2.
Заявляемый вариант системы в соответствии со структурной схемой фиг.2 содержит N НИСЗ, формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ 1 на летательном аппарате с бортовой приемной антенной 2 на входе, опорный псевдоспутник 3 (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны 4, наземного приемника 5 сигналов НИСЗ, вычислителя измеряемых параметров 6 и вычислителя поправок 7, а также передатчика ОПС 8, запускающий вход которого соединен с выходом опорного генератора 9, выход упомянутого передатчика ОПС 8 соединен с входом передающей антенны ОПС 10, а установочный вход вычислителя поправок 7 и второй информационный вход передатчика ОПС 8 служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ 1 и с наземным приемником сигналов НИСЗ 5, n дополнительных псевдоспутников 11.1…11.n (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС 12, состоящий из вычислителей 12.1…12.n, блок информационных параметров аэропорта 13 и распределительный узел 14 с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор 15.1…15.n, выходом соединенный с запускающим входом передатчика ДПС 16.1…16.n, выход передатчика ДПС соединен с входом передающей антенны ДПС 17.1…17.n, распределительный узел 14 соединен входом с выходом вычислителя поправок 7, первым выходом соединен с первым информационным входом передатчика ОПС 8, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС 15, вычислитель оптимальных координат ДПС 12 включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей 12 соединены с выходом блока информационных параметров аэропорта 13, а первый вход первого вычислителя 12 служит для ввода координат ОПС. В систему введены новые узлы и связи: на борту введен ретранслятор 18, в который входят бортовой приемник сигналов псевдоспутников 19 с обращенной в сторону Земли приемной антенной ретранслятора 20 на входе и (n+1) выходами, (n+1) понижающих преобразователей частоты 21.1…21.(n+1), (n+1) повышающих преобразователей частоты 22.1…22.(n+1), (n+1) блоков автоматической регулировки мощности 27.1…27.(n+1), (n+1) блоков ограничения мощности 23.1….23.(n+1), бортовой передатчик преобразованных сигналов псевдоспутников 24 с передающей антенной ретранслятора 25 на выходе и синтезатор частоты 26 с 2 (n+1) выходами, а также введены вычислитель расстояний от летательного аппарата до каждого из псевдоспутников 28, функциональный преобразователь расстояния в уровень сигнала 29 с (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников 19 соединены с входами соответствующих понижающих преобразователей частоты 21, выходы которых соединены с входами соответствующих блоков автоматической регулировки мощности 27, выходы которых соединены с входами соответствующих блоков ограничения мощности 23, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты 22, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников 24, а синтезатор частоты 26 соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты 21 и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты 22, выход бортового приемника сигналов НИСЗ 1 соединен с первым входом вычислителя расстояний от летательного аппарата до каждого из псевдоспутников 28, на второй вход которого поступают координаты из бортовой базы данных, выход которого соединен с входом функционального преобразователя расстояния в уровень сигнала 29, (n+1) выходы которого соединены с управляющими входами соответствующих блоков автоматической регулировки мощности 27, при этом в качестве бортового приемника сигналов НИСЗ 1 использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной 2 на входе, а ретранслятор 18 связан информационной связью передача-прием с ОПС 3 и ДПС 11 через передающие антенны ОПС 10, ДПС 17 и приемную антенну ретранслятора 20 и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ 1 через передающую антенну ретранслятора 25 и бортовую приемную антенну 2.
Система посадки по структурной схеме фиг.1 работает следующим образом.
Узлы 1-17 выполняют функции, аналогичные указанным в прототипе [3].
Наземный приемник сигналов НИСЗ 5 ОПС 3 и бортовой приемник сигналов НИСЗ 1 принимают радионавигационные сигналы НИСЗ; вычислитель 6 ОПС обрабатывает принятые сигналы и формирует массив псевдодальностей до НИСЗ и вычисляет координаты ОПС. Далее эти данные поступают на вход вычислителя поправок 7, на который также поступают заданные координаты ОПС. Вычислитель 7 производит вычисление поправок в соответствии с требованиями [8] и формирует КИ.
С выхода вычислителя 7 вычисленные поправки к псевдодальностям до каждого из N НИСЗ через распределитель поправок 14 поступают на первый информационный вход передатчика ОПС 8 и на первые информационные входы передатчиков ДПС 16. Одновременно на запускающий вход передатчика ОПС 8 поступают сигналы с выхода опорного генератора 9. На запускающие входы всех передатчиков ДПС 16 поступают также сигналы со всех соответствующих опорных генераторов 15. Вычислитель 12 производит последовательное вычисление оптимальных координат для каждого ДПС 11 и выводит их на вторые информационные входы передатчиков 16. (ДПС размещают в соответствии с упомянутыми координатами.)
В отличие от системы-прототипа (n+1) сигналы ПС (n ДПС и ОПС) принимаются на ЛА антенной ретранслятора 20 специально введенного бортового приемника сигналов ПС 19. С (n+1) выходов приемника 19, соответствующих определенному ПС, сигналы поступают на входы (n+1) понижающих преобразователей частоты 21, которые понижают частоту до диапазона, позволяющего эффективно ограничивать мощность сигналов с помощью (n+1) блоков ограничения мощности 21. Сигналы ограниченной мощности на выходе блоков 23 повышаются по частоте (n+1) повышающими преобразователями частоты 22 до диапазона частот сигналов СРНС. Передача этих сигналов повышенной частоты производиться с помощью бортового передатчика сигналов ПС 24 через антенну ретранслятора 25. Таким образом, ретранслятор 18 обеспечивает информационную связь передача-прием ПС с бортовым приемником сигналов НИСЗ 1.
Управление понижением и повышением частоты в ретрансляторе сигналов производится с помощью синтезатора частоты 26.
Используемые ПС имеют частоты, смещенные относительно спутниковых сигналов НИСЗ с целью устранения взаимных помех сигналов ПС и НИСЗ. Для работы ПС целесообразно использовать частотный навигационный диапазон 960-1215 МГц, поскольку известные навигационные системы DME, РСБН, работающие в этом диапазоне, используют импульсные сигналы с большой скважностью, что обеспечивает их хорошую совместимостью с непрерывными псевдослучайными сигналами СРНС [8]).
Полезный эффект в системе по фиг.1 достигается благодаря ограничению мощности сигнала, приходящего от ПС, до уровня мощности спутниковых сигналов. При изменении дальности до ПС динамический диапазон изменения мощности сигнала ПС сокращается благодаря действию ограничителя мощности, и тем самым увеличивается дальность надежного приема сигналов ПС без помех спутниковым сигналам. Вследствие этого на борту можно использовать унифицированный приемник сигналов НИСЗ, при этом в алгоритм вторичной обработки приемника должны вноситься изменения.
Рассмотрим возможность реализации предлагаемой схемы. В настоящее время разработаны специальные микросхемы, работающие на промежуточной частоте до 500 МГц и предназначенные для ограничения мощности сигналов в передающих и приемных устройствах цифровых сигналов. В качестве примера рассмотрим устройство ограничения мощности на микросхеме AD8367 (фирма Analog Devices), которая представляет собой усилитель с пассивным аттенюатором и измерителем мощности с квадратичным детектором. Подобный принцип построения ограничителя позволяет снизить нелинейные искажения и влияние температуры на работу устройства. Микросхема имеет диапазон регулирования 45 дБ и погрешность ограничения менее 1 дБ. Если используемый приемник имеет динамический диапазон 20 дБ и диапазон ограничения мощности в ретрансляторе составляет 40 дБ, то диапазон изменения мощности принимаемого сигнала ПС составит 60 дБ. Выбрав запас 10 дБ на компенсацию влияния диаграммы направленности приемной антенны ретранслятора при колебаниях корпуса ЛА, получим допустимое изменение напряженности поля сигнала ПС, равное 50 дБ. При этом можно обеспечить прием сигнала ПС в интервале дальностей 60 м - 19 км. Это расстояние меньше, чем дальность действия системы посадки метрового диапазона (по азимутальному каналу - 46 км, по глиссадному - 18,5 км). Для расширения диапазона дальности необходимы дополнительные решения.
В другом предложенном варианте системы с ПС (фиг.2), также имеющей в качестве прототипа систему [3], функционирование известных блоков происходит, как в системе [3] и в первом варианте системы, представленной на фиг.1.
Однако, в отличие от варианта системы с ПС на фиг.1, перед ограничением мощности производится автоматическая регулировка мощности с помощью блоков автоматической регулировки мощности 27.
На входы блоков автоматической регулировки мощности 27 поступают сигналы с соответствующих выходов понижающих преобразователей частоты 21, и только после выполнения автоматической регулировки мощности в блоках 27 выходные сигналы блоков 27 ограничиваются в блоках ограничения мощности 23, с выходов которых через повышающие преобразователи частоты 22, бортовой передатчик 23 и антенну 25 сигналы ПС, автоматически отрегулированные и ограниченные по мощности, поступают на вход стандартного навигационного приемника сигналов НИСЗ 1.
Автоматическая регулировка мощности производится в функциональной зависимости от расстояния между ЛА и ПС. С этой целью в вычислителе 28 (на основе поступающих на первый вход координат ЛА и поступающих на второй вход координат ПС из бортовой базы данных) определяются расстояния от ЛА до каждого из ПС. Упомянутые расстояния преобразовываются функциональным преобразователем 29 в уровни сигналов, необходимых для использования в качестве управляющих сигналов блоков автоматической регулировки мощности 27.
В качестве автоматического регулятора мощности 27 можно использовать усилитель с цифровым управлением коэффициентом усиления, например микросхему AD8369 (фирма «Analog Devices»). Так как этот усилитель имеет логарифмическую характеристику преобразования, функциональный преобразователь должен вычислять зависимость log(1/r2), где r - расстояние между ЛА и ПС.
При использовании усилителя с цифровым управлением (например, микросхема AD8369 имеет диапазон регулирования 45 дБ) можно получить те же характеристики, что и с ограничителем мощности, однако имеется опасность перегрузки бортового приемника сигналов НИСЗ мощным сигналом из-за разброса коэффициентов усиления передающей антенны ПС и приемной антенны ретранслятора на борту ЛА. Поэтому наилучшую стабилизацию уровня мощности сигнала при изменении дальности можно получить путем применения автоматического регулятора мощности, к выходу которого последовательно подключен ограничитель мощности. При этом диапазон контроля мощности принимаемого сигнала превышает 80 дБ, в то время как диапазону дальностей 0,06-46 км соответствует изменение мощности сигнала 58 дБ. Таким образом, при совместном использовании автоматического регулятора и ограничителя мощности требуемая дальность 46 км обеспечивается с большим запасом на изменение коэффициента усиления приемной антенны ретранслятора ЛА при маневрировании (порядка 22 дБ).
В качестве преобразователей частоты 21 и 22 целесообразно использовать смеситель AD8343 (фирма «Analog Devices»). При этом в качестве приемника 19 достаточно использовать согласующий усилительный каскад с полосовым фильтром (например, с ПАВ-фильтром) на входе, выделяющим частотный диапазон сигналов ПС. В качестве передатчика 24 достаточно использовать согласующий усилительный каскад с полосовым фильтром на выходе, ограничивающим излучение сигналов вне полосы СРНС. Для преобразователей частоты 21, 22 требуются напряжения гетеродинов, которые формируются в синтезаторе частоты 26.
Рассмотрим требования к синтезатору частоты, используемому в системах с ПС, представленных на фиг.1 и фиг.2.
Алгоритм преобразования частот описывается следующими соотношениями:
fРЕГ=fПС-f1,
fL1=fРЕГ+f2,
fРЕГ<fГР,
где fРЕГ - частота, на которой выполняется регулирование и ограничение мощности сигнала ПС, причем значение ее не должно превышать граничного значения fГР, определяемого частотным диапазоном работы блоков ограничения и автоматического регулирования мощности; fПС - частота сигнала ПС; fL1 - частота сигнала НИСЗ в диапазоне L1; f1 и f2 - частоты напряжений гетеродинов, которые формируются в синтезаторе частоты для каждого ПС.
Кроме того, значения fПС должны находиться в частотном диапазоне 960-1215 МГц, в котором работают известные навигационные системы DME, РСБН. С целью простоты реализации синтезатора частоты целесообразно также выполнить условие: f2=mf1, где m - целое.
При заданном значении fПС выполняется соотношение:
(m-1)f1=fL1-fПС=const.
С ростом m уменьшается f1, что приводит к увеличению fРЕГ=fПС-f1 и нарушению условия fРЕГ<fГP. По этой причине целесообразно выбрать m=2. Методика определения частот напряжений гетеродинов синтезатора частоты при этом следующая: задается значение fПС, вычисляются f1=fL1-fПС и fРЕГ=fПС-f1, после чего проверяется условие fРЕГ<fГР. Пример расчетов (при fL1=1600 МГц) приведен в таблице.
Заметим, что условие fPEГ<fГР ограничивает значение fПС сверху. Если fГP=500 МГц, то из условия fL1-2f1=fPEГ=500 МГц при fL1=1600 МГц находим f1=550 МГц, а из условия fПС-f1=fРЕГ=500 МГц находим fПС=1050 МГц. Следовательно, ПС могут работать в первом (нижнем) частотном диапазоне радиомаяка DME (960-1025 МГц) и во всем частотном диапазоне дальномерного радиомаяка РСБН (939,6-1000,5 МГц).
Таким требованиям к синтезатору частоты 26 в ретрансляторе сигналов псевдоспутников 18 удовлетворяет, например, микросхема ADF4360-7 (фирма «Analog Devices») с системой фазовой автоподстройки частоты в составе синтезатора и встроенным управляемым генератором. Подобный принцип построения синтезатора частоты позволяет снизить уровень комбинационных частот в спектре преобразованных сигналов ПС [7]. В микросхеме имеется основной выход сигнала с частотой в диапазоне 350-1800 МГц (частота f2) и дополнительный выход сигнала с половинной частотой в диапазоне 175-900 МГц (частота f1).
Трудоемкость и, следовательно, стоимость изготовления предложенной системы на приведенной выше элементной базе много ниже, чем разработка и изготовление нового навигационного приемника сигналов НИСЗ и псевдоспутников.
Математическое моделирование, полунатурные и летные испытания системы посадки ЛА на основе спутниковых радионавигационных систем ГЛОНАСС/GPS, дополненных одним или несколькими ПС, в которой использованы заявляемые варианты системы посадки, показывают, что вероятность аварийных летных ситуаций, по сравнению с прототипом, может быть снижена на 20-30%.
Проведенные летные испытания на самолете типа Як-42 и вертолете типа Ми-8 показали техническую целесообразность и эффективность использования заявляемой системы.
Таким образом, заявляемое изобретение чрезвычайно перспективно для повышения надежности системы посадки ЛА, снижения вероятности летных происшествий.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. GPS precision approach and landing system for aircraft. Patent Number: 5,311,194, Date of Patent: May 10, 1994.
2. Сетевые спутниковые радионавигационные системы. / В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др., под редакцией B.C.Шебшаевича. - М.: Радио и связь, 1993.
3. Спутниковая радионавигационная система захода на посадку и посадки. Патент РФ 2236020 G01S 5/02, заявлен 19.09.2002, опубликован 10.09.2004.
4. S.Martin. Antenna diagram shaping for pseudolite transmitter antennas - a solution to the near-far problem. // ION GPS'99, p.1479.
5. C.Bartone, F. van Grass Airport pseudolite for precision approach applications. // ION GPS'97. p.1841
6. Сосновский A.A., Хаймович И.А. и др. Авиационная радионавигация: Справочник. - М.: Транспорт, 1990.
7. Генераторы высоких и сверхвысоких частот: Учеб. пособие для вузов / О.В.Алексеев, А.А.Головков, А.В.Митрофанов, В.В.Полевой, А.А.Соловьев. - М.: Высш. шк., 2003.
8. Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том 1, Изд. Шестое, Июль 2006 г. - Режим доступа: http://www.icao.org/
Перечень обозначений к Приложению (фиг.3)
1. ОПС
2. Наземный приемник сигналов НИСЗ
3. Наземная приемная антенна
4. Вычислитель измеряемых параметров
5. Вычислитель поправок
6. Передатчик ОПС
7. Опорный генератор
8. Передающая антенна ОПС
9. Бортовой приемник сигналов НИСЗ
10. Дополнительная бортовая приемная антенна
11. Бортовая приемная антенна
12. Вычислитель оптимальных координат ДПС
13. Блок информационных параметров аэропорта
14. Распределительный узел
151…15n. Опорные генераторы
161…16n. Передатчики ДПС
171…17n. Передающие антенны ДПС
Перечень обозначений на фиг.1
1. Бортовой приемник сигналов НИСЗ
2. Бортовая приемная антенна
3. ОПС
4. Наземная приемная антенна
5. Наземный приемник сигналов НИСЗ
6. Вычислитель измеряемых параметров
7. Вычислитель поправок
8. Передатчик ОПС
9. Опорный генератор
10. Передающая антенна ОПС
11. 1…11.n. ДПС
12. Вычислитель оптимальных координат ДПС
13. Блок информационных параметров аэропорта
14. Распределительный узел
15. 1…15.n. Опорные генераторы
16. 1…16.n. Передатчики ДПС
17. 1…17.n. Передающие антенны ДПС
18. Ретранслятор
19. Бортовой приемник сигналов псевдоспутников
20. Приемная антенна ретранслятора
21. 1…21.(n+1). Понижающие преобразователи частоты
22. 1…22.(n+1). Повышающие преобразователи частоты
23. 1…23.(n+1). Блоки ограничения мощности
24. Бортовой передатчик преобразованных сигналов псевдоспутников
25. Передающая антенна ретранслятора
26. Синтезатор частоты
Перечень обозначений на фиг.2
1. Бортовой приемник сигналов НИСЗ
2. Бортовая приемная антенна
3. ОПС
4. Наземная приемная антенна
5. Наземный приемник сигналов НИСЗ
6. Вычислитель измеряемых параметров
7. Вычислитель поправок
8. Передатчик ОПС
9. Опорный генератор
10. Передающая антенна ОПС
11. 1…11.n. ДПС
12. Вычислитель оптимальных координат ДПС
13. Блок информационных параметров аэропорта
14. Распределительный узел
15. 1…15.n. Опорные генераторы
16. 1…16.n. Передатчики ДПС
17. 1…17.n. Передающие антенны ДПС
18. Ретранслятор
19. Бортовой приемник сигналов псевдоспутников
20. Приемная антенна ретранслятора
21. 1…21.(n+1). Понижающие преобразователи частоты
22. 1…22.(n+1). Повышающие преобразователи частоты
23. 1…23.(n+1). Блоки ограничения мощности
24. Бортовой передатчик преобразованных сигналов псевдоспутников
25. Передающая антенна ретранслятора
26. Синтезатор частоты
27. 1…27.n+1. Блоки автоматической регулировки мощности
28. Вычислитель расстояний от летательного аппарата до каждого из псевдоспутников
29. Функциональный преобразователь расстояния в уровень сигнала
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
| СИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК К ИЗМЕРЯЕМЫМ КООРДИНАТАМ ПОДВИЖНОГО ОБЪЕКТА | 1986 |
|
SU1840575A1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
Изобретение относится к области радиотехники, а именно, к системам посадки летательных аппаратов (ЛА) на основе спутниковых радионавигационных систем ГЛОНАСС, GPS, и может быть использовано для оснащения необорудованных радиомаячными посадочными средствами аэродромов и вертолетных площадок. Технический результат заключается в повышении надежности системы посадки ЛА при использовании стандартного навигационного приемника спутниковых сигналов. Для этого на борту ЛА введены ретранслятор сигналов псевдоспутников, в который входят бортовой приемник сигналов псевдоспутников с обращенной в сторону Земли приемной антенной ретранслятора на входе, понижающие преобразователи частоты, повышающие преобразователи частоты, блоки ограничения мощности, бортовой передатчик преобразованных сигналов псевдоспутников с передающей антенной ретранслятора на выходе и синтезатор частоты, при этом в качестве бортового приемника спутниковых сигналов использован стандартный навигационный приемник спутниковых сигналов с бортовой приемной антенной на входе, а с псевдоспутниками осуществляется информационная связь. Также предложен вариант системы, отличающейся повышенной дальностью действия за счет дополнительно включенных блока автоматической регулировки мощности, вычислителя расстояний от ЛА до каждого псевдоспутника и функционального преобразователя расстояния в уровень сигнала. 2 н.п. ф-лы, 3 ил.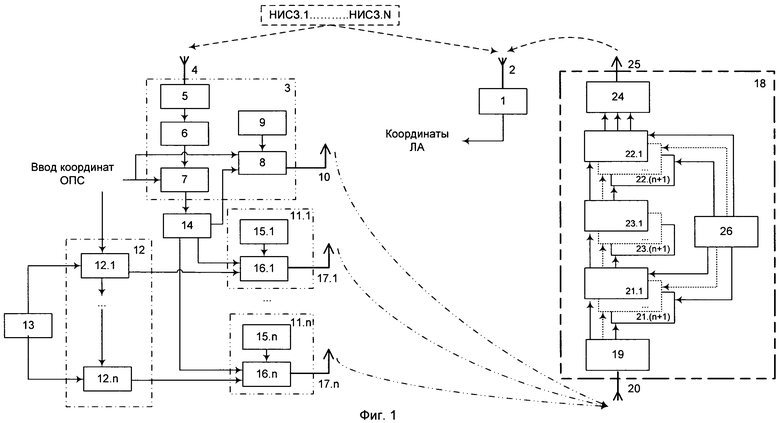
1. Спутниковая радионавигационная система, содержащая N навигационных искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ на летательном аппарате с бортовой приемной антенной на входе, опорный псевдоспутник (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны, наземного приемника сигналов НИСЗ, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика ОПС, запускающий вход которого соединен с выходом опорного генератора, выход упомянутого передатчика ОПС соединен с входом передающей антенны ОПС, а установочный вход вычислителя поправок и второй информационный вход передатчика ОПС служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ и с наземным приемником сигналов НИСЗ, n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика ДПС, выход передатчика ДПС соединен с входом передающей антенны ДПС, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС, вычислитель оптимальных координат ДПС включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС, отличающаяся тем, что на борту введен ретранслятор, в который входят бортовой приемник сигналов псевдоспутников с обращенной в сторону Земли приемной антенной ретранслятора на входе и (n+1) выходами, (n+1) понижающих преобразователей частоты, (n+1) повышающих преобразователей частоты, (n+1) блоков ограничения мощности, бортовой передатчик преобразованных сигналов псевдоспутников с передающей антенной ретранслятора на выходе и синтезатор частоты с 2 (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников соединены с входами соответствующих понижающих преобразователей частоты, выходы которых соединены с входами соответствующих блоков ограничения мощности, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников, а синтезатор частоты соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты, при этом в качестве бортового приемника сигналов НИСЗ использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной на входе, а ретранслятор связан информационной связью передача-прием с ОПС и ДПС через передающие антенны ОПС, ДПС и приемную антенну ретранслятора и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ через передающую антенну ретранслятора и бортовую приемную антенну.
2. Спутниковая радионавигационная система, содержащая N навигационных искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, бортовой приемник сигналов НИСЗ на летательном аппарате с бортовой приемной антенной на входе, опорный псевдоспутник (ОПС), расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных наземной приемной антенны, наземного приемника сигналов НИСЗ, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика ОПС, запускающий вход которого соединен с выходом опорного генератора, выход упомянутого передатчика ОПС соединен с входом передающей антенны ОПС, а установочный вход вычислителя поправок и второй информационный вход передатчика ОПС служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ и с наземным приемником сигналов НИСЗ, n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат ДПС, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика ДПС, выход передатчика ДПС соединен с входом передающей антенны ДПС, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков ДПС, вычислитель оптимальных координат ДПС включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС, отличающаяся тем, что на борту введен ретранслятор, в который входят бортовой приемник сигналов псевдоспутников с обращенной в сторону Земли приемной антенной ретранслятора на входе и (n+1) выходами, (n+1) понижающих преобразователей частоты, (n+1) повышающих преобразователей частоты, (n+1) блоков автоматической регулировки мощности, (n+1) блоков ограничения мощности, бортовой передатчик преобразованных сигналов псевдоспутников с передающей антенной ретранслятора на выходе и синтезатор частоты с 2 (n+1) выходами, а также введены вычислитель расстояний от летательного аппарата до каждого псевдоспутника, функциональный преобразователь расстояния в уровень сигнала с (n+1) выходами, при этом выходы бортового приемника сигналов псевдоспутников соединены с входами соответствующих понижающих преобразователей частоты, выходы которых соединены с входами соответствующих блоков автоматической регулировки мощности, выходы которых соединены с входами соответствующих блоков ограничения мощности, выход каждого из которых соединен с входом соответствующего повышающего преобразователя частоты, выходы которых соединены с соответствующими (n+1) входами бортового передатчика преобразованных сигналов псевдоспутников, а синтезатор частоты соединен (n+1) выходами с дополнительными входами соответствующих понижающих преобразователей частоты и другими (n+1) выходами с дополнительными входами соответствующих повышающих преобразователей частоты, выход бортового приемника сигналов НИСЗ соединен с первым входом вычислителя расстояний от летательного аппарата до каждого из псевдоспутников, на второй вход которого поступают координаты из бортовой базы данных, выход которого соединен с входом функционального преобразователя расстояния в уровень сигнала, (n+1) выходов которого соединены с управляющими входами соответствующих блоков автоматической регулировки мощности, при этом в качестве бортового приемника сигналов НИСЗ использован стандартный навигационный приемник сигналов НИСЗ с бортовой приемной антенной на входе, а ретранслятор связан информационной связью передача-прием с ОПС и ДПС через передающие антенны ОПС, ДПС и приемную антенну ретранслятора и связан информационной связью передача-прием с бортовым приемником сигналов НИСЗ через передающую антенну ретранслятора и бортовую приемную антенну.
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| Почвенный бур | 1924 |
|
SU8812A1 |
| RU 98109269 А, 10.02.2000 | |||
| US 5017930 А, 21.05.1991 | |||
| US 4866450 А, 12.09.1989 | |||
| Способ устранения морщин кожи лица | 1988 |
|
SU1697758A1 |
| Стрелочный замок с тремя ключами | 1927 |
|
SU13169A1 |

