Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей угловых скоростей и линейных ускорений с цифровым выходом информации [1-3].
Одним из основных требований, предъявляемым к гироскопическим датчикам - гироскопам и акселерометрам, при их использовании в пилотажных системах управления летательными аппаратами, является обеспечение минимального уровня шумовой составляющей в их выходных сигналах.
Известными и широко распространенными способами подавления шумовой составляющей в выходных сигналах гироскопических датчиков с цифровым выходом информации является использование разнообразных цифровых фильтров [4, 5, 6, 7].
Основным недостатком таких фильтров является возникновение большого фазового запаздывания выходного сигнала датчика, вызванное временной задержкой, что делает в ряде случаев невозможным использование датчиков в системах управления летательными аппаратами.
Прототипом предлагаемого изобретения является цифровой фильтр [8], в котором задача обеспечения заданного уровня цифровой фильтрации шумовой составляющей в выходном сигнале датчика при минимальном фазовом запаздывании, решается путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала шумовой составляющей заданной величины с учетом ее знака. При использовании такого фильтра фазовое запаздывание практически не имеет места. Это его основное преимущество.
Основными недостатками прототипа являются: ограниченная величина компенсации шумовой составляющей в выходном сигнале инерциального датчика, возможность изменения среднего значения выходного сигнала при быстрых изменениях измеряемой величины сигнала.
Заявленное изобретение решает задачу обеспечения максимального уровня цифровой фильтрации шумовой составляющей в выходном сигнале датчика без искажений его среднего значения.
Техническим результатом заявленного изобретения является повышение качества цифровой фильтрации шумовой составляющей выходного сигнала инерциальных датчиков.
Заявленный технический результат достигается способом цифровой фильтрации шумовой составляющей в инерциальных датчиках путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала датчика шумовой составляющей заданной величины с учетом ее знака, при этом согласно изобретению дополнительно осуществляется предварительное осреднение выходного сигнала датчика, полученный результат вычитается из среднего значения выходного сигнала, определенного на рабочем интервале фильтрации, и сравнивается с допустимой для дальнейшей фильтрации их разностью по модулю, при превышении этой величины дальнейшая фильтрация не производится, при соблюдении заданного ограничения фильтрация выходного сигнала датчика осуществляется путем вычитания из выходного сигнала разности между мгновенным и средним значениями выходного сигнала, при этом вводится задержка включения фильтра на заданное время.
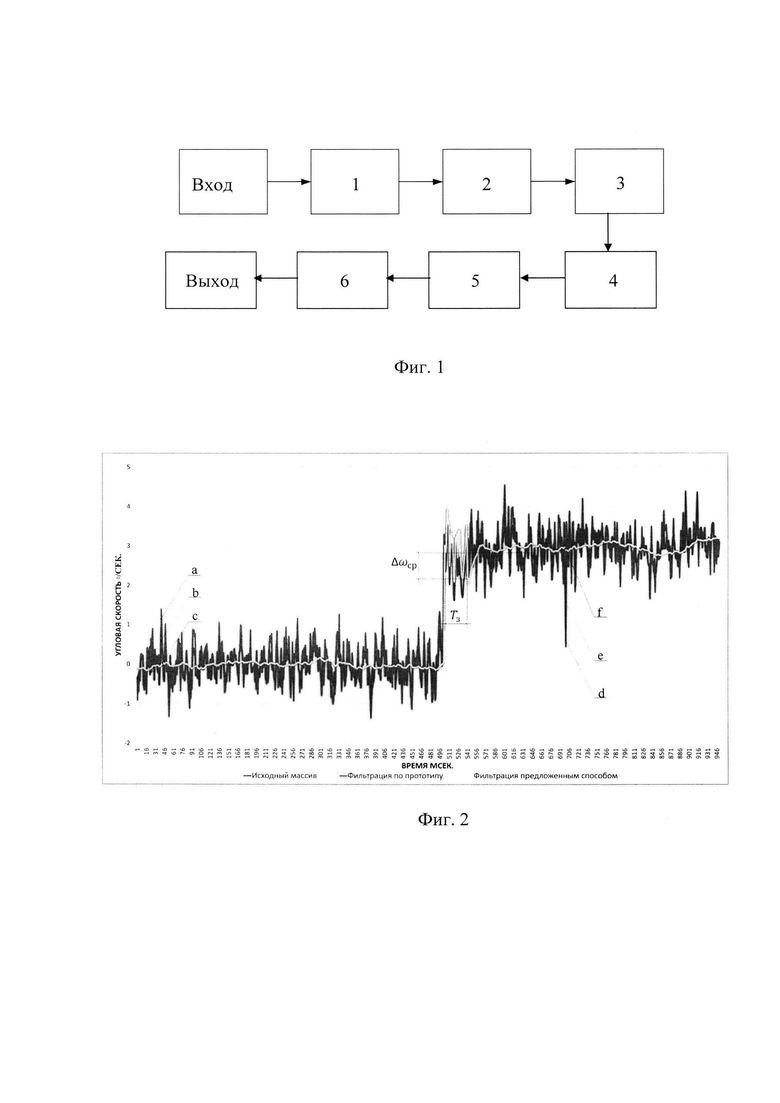
Сущность изобретения поясняется Фиг. 1, 2.
На Фиг. 1 приведена структурно-функциональная схема системы, реализующей предложенный способ цифровой фильтрации.
На Фиг. 2 приведен график с полученными результатами фильтрации выходного сигнала микромеханического гироскопа ADXRS 646 американской фирмы Analog Devices, где: а - исходный массив выходного сигнала гироскопа ADXRS 646; b - выходной сигнал, отфильтрованный по алгоритму прототипа; с - выходной сигнал, отфильтрованный предложенным способом фильтрации; d - выброс шумовой составляющей исходного массива; е - выброс шумовой составляющей при фильтрации по прототипу; f - компенсация выброса после введения предварительного осреднения по предложенному способу; Δωср - смещение среднего значения выходного сигнала при фильтрации по прототипу; Тз - время задержки включения фильтра.
Изобретение реализуется следующим образом. В блоке 1 (Фиг. 1) осуществляется прием измеряемого сигнала, в блоке 2 предварительное осреднение выходного сигнала  на коротком интервале времени ΔТк<<ΔТр, необходимое для компенсации выбросов шумовой составляющей (Фиг. 2, позиции а, b, с). В блоке 3 производится расчет скользящего среднего значения выходного сигнала ωср(n) на рабочем интервале фильтрации ΔТр. В блоке 4 находится разность по модулю между средним значением выходного сигнала на рабочем интервале фильтрации и средним значением предварительного осреднения выходного сигнала
на коротком интервале времени ΔТк<<ΔТр, необходимое для компенсации выбросов шумовой составляющей (Фиг. 2, позиции а, b, с). В блоке 3 производится расчет скользящего среднего значения выходного сигнала ωср(n) на рабочем интервале фильтрации ΔТр. В блоке 4 находится разность по модулю между средним значением выходного сигнала на рабочем интервале фильтрации и средним значением предварительного осреднения выходного сигнала  . Полученная величина сравнивается с допустимой Δσ из условия обеспечения фильтрации без искажения выходного сигнала. Она должна быть меньше допустимой Δωк<Δσ. При выполнении этого условия в блоке 5 производится расчет компенсирующей величины шумовой составляющей в виде разности между мгновенным значением выходного сигнала ω(n) и его средним значением ωср(n), определенном на рабочем интервале фильтрации Δω(n)=ω(n)-ωср(n), и определяется знак полученной разности: если Δω(n)>ωср(n), то знак при Δω(n) принимается положительным, а если Δω(n)<ωср(n), то знак при Δω(n) принимается отрицательным. Кроме того, в этом же блоке контролируется условие задержки включения фильтра в виде с≥Тз, где Тз - время задержки, соблюдение которой необходимо для устранения смещения среднего значения Δωср выходного сигнала при его переходе от быстро изменяющейся величины к постоянной - фиг. 2. В блоке 6 производится вычитание рассчитанного уровня помехи из выходного сигнала
. Полученная величина сравнивается с допустимой Δσ из условия обеспечения фильтрации без искажения выходного сигнала. Она должна быть меньше допустимой Δωк<Δσ. При выполнении этого условия в блоке 5 производится расчет компенсирующей величины шумовой составляющей в виде разности между мгновенным значением выходного сигнала ω(n) и его средним значением ωср(n), определенном на рабочем интервале фильтрации Δω(n)=ω(n)-ωср(n), и определяется знак полученной разности: если Δω(n)>ωср(n), то знак при Δω(n) принимается положительным, а если Δω(n)<ωср(n), то знак при Δω(n) принимается отрицательным. Кроме того, в этом же блоке контролируется условие задержки включения фильтра в виде с≥Тз, где Тз - время задержки, соблюдение которой необходимо для устранения смещения среднего значения Δωср выходного сигнала при его переходе от быстро изменяющейся величины к постоянной - фиг. 2. В блоке 6 производится вычитание рассчитанного уровня помехи из выходного сигнала  с учетом знака. Полученный результат
с учетом знака. Полученный результат  идет на выход алгоритма.
идет на выход алгоритма.
При невыполнении условия Δωк<Δσ фильтрация не производится. Далее на последующих тактах измерений процедура, изложенная выше, повторяется.
Как видно из приведенных графиков (фиг. 2), использование предложенного метода цифровой фильтрации позволяет максимально скомпенсировать шумовую составляющую - до уровня среднего значения выходного сигнала, компенсировать отдельные выбросы и не искажать выходной сигнал в переходных режимах, что чрезвычайно важно для повышения качества регулирования при использовании инерциальных датчиков первичной информации в комплексных системах управления летательных аппаратов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Кузнецов А.Г., Абутидзе З.С., Портнов Б.И., Галкин В.И., Калик А.А. Микромеханические датчики для пилотажных систем управления // Гироскопия и навигация. 2010, №2(69). С. 50-56.
2. ST Microelectronics (США), каталог микромеханических приборов, www.st.com.
3. Sensonor A.S. (Норвегия), гироскоп STIM-210, www.sensor.com.
4. МТ Microsestems (Китай), каталог микромеханических приборов, www.cetcmems.com.
5. Г. Лэм Аналоговые и цифровые фильтры. Перевод с английского, М., «Мир», 1982, 592 с.
6. Введение в цифровую фильтрацию. Под редакцией Р. Богнера и А. Константинидиса. Перевод с английского, М., «Мир», 1975, 216 с.
7. И.А. Мизин, А.А. Матвеев Цифровые фильтры (анализ, синтез, реализация с использованием ЭВМ). - М.: Связь, 1979. - 240 с., ил.
8. Патент РФ №2654941. Способ цифровой фильтрации шумовой составляющей в инерциальных датчиках / Галкин В.И., Воробьев Д.Н. / Бюллетень изобретений. - 2018 - №15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОЙ ФИЛЬТРАЦИИ ШУМОВОЙ СОСТАВЛЯЮЩЕЙ В ИНЕРЦИАЛЬНЫХ ДАТЧИКАХ | 2017 |
|
RU2654941C1 |
| СПОСОБ КОМПЕНСАЦИИ ДРЕЙФА НУЛЕВЫХ СИГНАЛОВ ГИРОСКОПИЧЕСКИХ ДАТЧИКОВ | 2016 |
|
RU2635846C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2691551C1 |
| Способ определения угла крена быстровращающегося летательного аппарата | 2024 |
|
RU2823718C1 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ РАБОТЫ КОРИОЛИСОВА ГИРОСКОПА И ЭЛЕКТРОННЫЙ БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2328701C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| НАШЛЕМНАЯ СИСТЕМА ОПЕРАТИВНОГО ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2010 |
|
RU2446421C1 |
Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей угловых скоростей и линейных ускорений с цифровым выходом информации. Сущность заявленного решения заключается в том, что способом цифровой фильтрации шумовой составляющей в инерциальных датчиках путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала датчика шумовой составляющей заданной величины с учетом ее знака, при этом дополнительно осуществляется предварительное осреднение выходного сигнала датчика, полученный результат вычитается из среднего значения выходного сигнала, определенного на рабочем интервале фильтрации, и сравнивается с допустимой для дальнейшей фильтрации их разностью по модулю, при превышении этой величины дальнейшая фильтрация не производится, при соблюдении заданного ограничения фильтрация выходного сигнала датчика осуществляется путем вычитания из выходного сигнала разности между мгновенным и средним значениями выходного сигнала, при этом вводится задержка включения фильтра на заданное время. Технический результат при реализации заявленного решения заключается в повышении качества цифровой фильтрации шумовой составляющей выходного сигнала инерциальных датчиков. 2 ил.
Способ цифровой фильтрации шумовой составляющей в инерциальных датчиках путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала датчика шумовой составляющей заданной величины с учетом ее знака, отличающийся тем, что дополнительно осуществляется предварительное осреднение выходного сигнала датчика, полученный результат вычитается из среднего значения выходного сигнала, определенного на рабочем интервале фильтрации, и сравнивается с допустимой для дальнейшей фильтрации их разностью по модулю, при превышении этой величины дальнейшая фильтрация не производится, при соблюдении заданного ограничения фильтрация выходного сигнала датчика осуществляется путем вычитания из выходного сигнала разности между мгновенным и средним значениями выходного сигнала, при этом вводится задержка включения фильтра на заданное время.
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ПЛАТФОРМОЙ В БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667320C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| СПОСОБ И УСТРОЙСТВО БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2018 |
|
RU2685767C1 |
| CN 101661047 A, 03.03.2010. | |||

