Заявленное изобретение относится к системам ориентации и навигации летательных аппаратов, в частности к бесплатформенным гировертикалям, курсовертикалям и навигационным системам, в которых измерительная информация поступает с датчиков угловых скоростей и акселерометров.
Известны бесплатформенные инерциальные системы ориентации с радиальной коррекцией, в которых положение цифровой платформы в инерциальной системе координат определяется по показаниям датчиков угловой скорости, а приведение к местной вертикали осуществляется по показаниям акселерометров. В этом случае также компенсируется дрейф датчиков угловых скоростей. При этом осуществляется отключение приведения платформы при воздействии на подвижный объект линейных ускорений в связанной системе координат, вызванных разгоном и разворотом объекта.
Основным недостатком таких систем является накопление угловых погрешностей вызванных дрейфом датчиков угловых скоростей и движением объекта по сфере Земли при отключении обратной связи в гировертикали во время разгона и торможения. В результате чего значения ускорений в инерциальной системе координат после включения обратной связи гировертикали превышают допустимые для управления, что приводит к невозможности восстановления системы управления цифровой платформы.
Прототипом заявленного изобретения является способ управления бесплатформенной гировертикалью с радиальной коррекцией и устройство для реализации этого способа (Патент РФ №2574379, МПК: G01C 23/00, опубл. 10.02.2016 г.).
Известный способ включает измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат с дополнительной возможностью выполнения вычислений и компенсации ошибок определения углов крена и тангажа при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат.
При этом устройство для реализации известного способа содержит трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформой при уменьшении линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой, блок приведения цифровой платформы для компенсации ошибок положения цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы.
При таком способе управления при наличии шумовых и вибрационных воздействий на гировертикаль величина амплитуды которых превышает допустимые для управления, система управления цифровой платформой будет отключена на всем промежутке времени действия вибраций. Это приведет к накоплению погрешностей измерения углов тангажа и крена, вызванных наличием дрейфа датчиков угловых скоростей и движением летательного аппарата по сфере Земли.
Техническим результатом заявленного изобретения является повышение точности измерения выходных углов ориентации объекта за счет компенсации вибрационных и шумовых воздействий на гировертикаль.
Указанный технический результат достигается способом управления цифровой платформой в бесплатформенной гировертикали, путем приведения цифровой платформы в зону управления бесплатформенной гировертикали, включающим измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную систему координат, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорениях в инерциальной системе координат и приведение цифровой платформы при превышении допустимых для управления значениях величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат, при этом дополнительно введена фильтрация линейных ускорений в связанной системе координат, а величина угловой скорости приведения цифровой платформы из зоны превышения допустимых для управления значений величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат устанавливается в зависимости от величины линейных ускорений в инерциальной системе координат и значения признака включения приведения платформы в зону допустимых для управления значений линейных ускорений в инерциальной системе координат.
Заявленный технический результат достигается также бесплатформенной гировертикалью, содержащей трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок пересчета линейных ускорений из связанной системы координат в инерциальную, блок управления цифровой платформой, блок приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы, при этом блок цифровой платформы соединен первым входом с выходом блока датчиков угловых скоростей, вторым входом с выходом блока управления цифровой платформой, третьим входом с выходом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, первым выходом со входом блока вычисления углов крена и тангажа, и вторым выходом с первым входом блока пересчета линейных ускорений из связанной системы координат в инерциальную, который вторым входом соединен с первым выходом трехосного блока датчиков линейных ускорений, первым выходом со входом блока управления цифровой платформой, и вторым выходом с первым входом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, при этом дополнительно введены блок фильтрации линейных ускорений в связанной системе координат и блок анализа величины линейных ускорений в инерциальной системе координат и признака включения приведения цифровой платформы, причем, вход блока фильтрации линейных ускорений в связанной системе координат соединен со вторым выходом трехосного блока датчиков линейных ускорений, а выход со входом блока включения приведения цифровой платформы, блок анализа величины линейных ускорений в инерциальной системе координат и признака включения приведения цифровой платформы первым входом соединен с выходом блока включения приведения цифровой платформы, вторым входом с третьим выходом блока пересчета линейных ускорений из связанной системы координат в инерциальную, первым выходом со вторым входом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, а вторым выходом соединен с четвертым входом блока цифровой платформы.
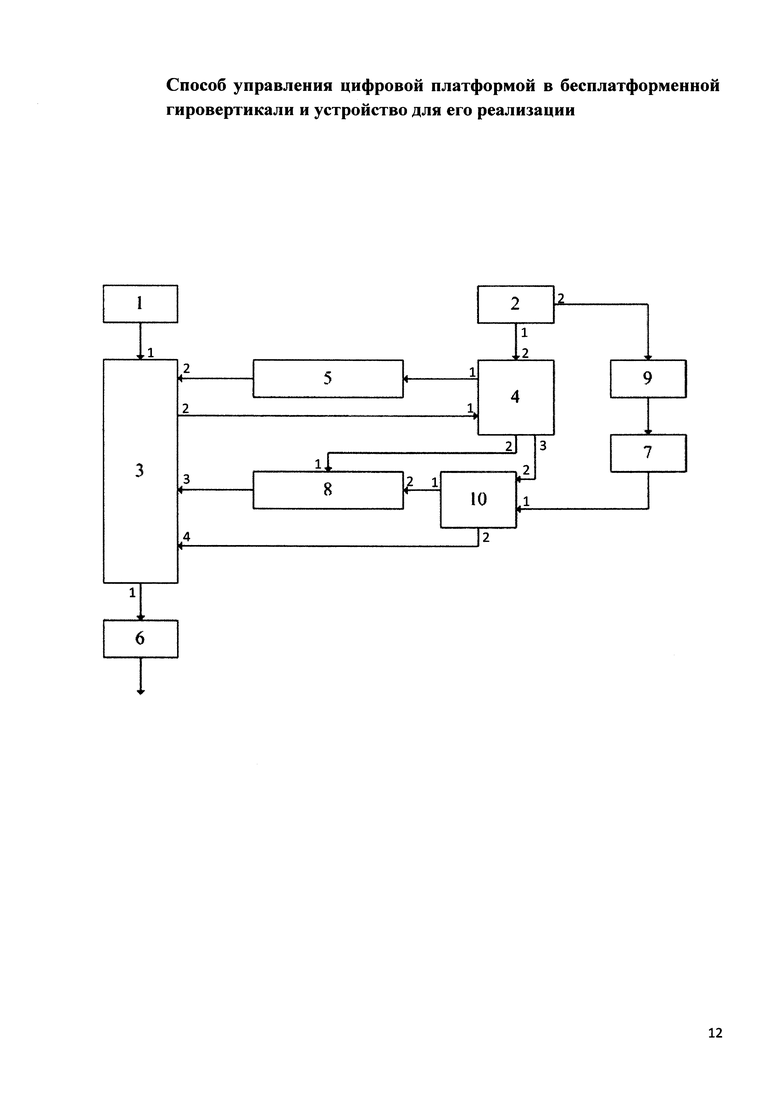
На Фиг. представлена структурно-функциональная блок-схема предложенной бесплатформенной гировертикали, где:
1 - трехосный блок датчиков угловых скоростей;
2 - трехосный блок датчиков линейных ускорений;
3 - блок цифровой платформы;
4 - блок пересчета линейных ускорений из связанной системы координат в инерциальную;
5 - блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформой при достижении допустимых для управления значений величин линейных ускорений в инерциальной системе координат;
6 - блок вычисления углов крена и тангажа;
7 - блок включения приведения цифровой платформы;
8 - блок приведения цифровой платформы для вычисления и компенсации ошибок положения цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат;
9 - блок фильтрации линейных ускорений в связанной системе координат;
10 - блок анализа величины линейных ускорений в инерциальной системе координат и признака включения приведения цифровой платформы.
Заявленные способ и устройство работают следующим образом.
Информация об угловых скоростях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока микромеханических датчиков угловых скоростей 1 в блок 3 цифровой платформы, в котором производится преобразование приращения углов из связанной системы координат в инерциальную и расчет углового положение цифровой платформы в виде коэффициентов aN матрицы направляющих косинусов. Коэффициенты матрицы направляющих косинусов передаются в блок 4 и в блок 6.
В блоке 6 по коэффициентам матрицы направляющих косинусов рассчитываются углы крена (γ) и тангажа (ϑ) летательного объекта в инерциальной системе координат.
Информация о линейных ускорениях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока микромеханических акселерометров 2 в блоки 4 и 9.
В блоке 4 по информации об угловом положении цифровой платформы, поступающей из блока 3 в виде коэффициентов матрицы направляющих косинусов, производится пересчет линейных ускорений из связанной системы координат в инерциальную систему координат.
Результаты расчета в виде проекций ускорений на инерциальные оси Ах,у передаются в блоки 5, 8, 10.
В блоке 5 рассчитывается угловая скорость управления цифровой платформой  , корректирующая положение цифровой платформы в блоке 3 по перекрестным инерциальным осям:
, корректирующая положение цифровой платформы в блоке 3 по перекрестным инерциальным осям:
 ,
,
где ky - коэффициент усиления сигнала управления.
Если углы крена и тангажа определены с ошибкой, вызванной, например, дрейфом гироскопов или угловой скоростью облета вокруг Земли, то проекции ускорений на инерциальные оси не будут равны нулю Ах,у≠0. В результате, в блоке 5 будет сформирован корректирующий сигнал , с помощью которого в блоке 3 будет скомпенсирована ошибка углового положения цифровой платформы.
Действие линейных ускорений по связанным осям летательного объекта axl,yl,zl≠0 также будет вызывать появление в блоке 4 ускорений по инерциальным осям Аx,y, а, следовательно, и сигналы обратной связи . Однако в этом случае они будут не компенсировать ошибки определения углового положения цифровой платформы, а, наоборот, создавать их.
Величина допустимого значения Аa,y≤АД определяется заданными ошибками определения углов крена и тангажа.
При больших линейных ускорениях, когда Аx,y становится равной или больше АД, обратная связь системы управления разрывается -  . В этот момент ошибки определения углов крена и тангажа будут возрастать из-за дрейфа гироскопов и скорости облета Земли.
. В этот момент ошибки определения углов крена и тангажа будут возрастать из-за дрейфа гироскопов и скорости облета Земли.
При исчезновении линейных ускорений, вызванных разгонными двигателями летательного аппарата или виражами и координированными разворотами, величина накопленной ошибки определения углов, определяемая величиной Ах,у, может оказаться больше допустимой (Ax,y>АД), что не позволит включиться обратной связи в блоке управления цифровой платформой 5.
Приведение цифровой платформы в область линейных ускорений по инерциальным осям Ах,у<АД осуществляется следующим образом.
В блоке 7 по информации, поступающей из блока 9, анализируется величина, действующих по связанным осям линейных ускорений в виде:
 ,
,
где:  - сумма квадратов текущих значений линейных ускорений, действующих по связанным осям;
- сумма квадратов текущих значений линейных ускорений, действующих по связанным осям;  - сумма квадратов линейных ускорений, действующих по связанным осям в момент первоначального включения гировертикали при неподвижном объекте.
- сумма квадратов линейных ускорений, действующих по связанным осям в момент первоначального включения гировертикали при неподвижном объекте.
При  в блоке 7 вырабатывается признак С=0, передаваемый в блок 10 и разрешающий включение приведения цифровой платформы в область значений Аx,y, допустимых для управления цифровой платформой. При
в блоке 7 вырабатывается признак С=0, передаваемый в блок 10 и разрешающий включение приведения цифровой платформы в область значений Аx,y, допустимых для управления цифровой платформой. При  вырабатывается признак С=1, запрещающий включение приведения гировертикали. Значение допустимого
вырабатывается признак С=1, запрещающий включение приведения гировертикали. Значение допустимого  определяется коэффициентом δ, который устанавливается в соответствии с техническим заданием.
определяется коэффициентом δ, который устанавливается в соответствии с техническим заданием.
Для обеспечения качественного управления обратной связью признак С должен реагировать на постоянную составляющую линейных ускорений по связанным осям. При вибрационном воздействии на летательный аппарат признак С тоже будет носить знакопеременный характер, что приведет к искажениям выходной информации гировертикали. В связи с этим, линейные ускорения, поступающие в блок 7 должны быть отфильтрованы. В блоке 9 осуществляется фильтрация линейных ускорений по связанным осям, поступающих из блока 2 в блок 7.
Однако наличие фильтрации вызывает запаздывание определения признака С в блоке 7. В результате запаздывания при возрастании линейного ускорения по связанным осям за пределы зоны управления, приведение платформы осуществляется с ошибкой, определяемой величиной действующих линейных ускорений по связанным осям, что приводит к ошибкам определения углов крена и тангажа.
Минимизация ошибок, вызванных запаздыванием выработки признака С, осуществляется следующим образом. В блоке 10 анализируются ускорения по инерциальным осям Аx,y, текущее значение признака С и предыдущее значение Спред. В блоке 10 установлены следующие условия, которые определяют три возможных режима обратной связи.
Если признак С=1, то управление цифровой платформой не производится (обратная связь отключена).
Если признак С=0, Спред=0 и Аx,y>Ад, то приведение цифровой платформы производится с ограниченной скоростью ωмин, обеспечивающей компенсацию дрейфа гироскопа.
Если признак С=0, Спред=1 и Аx,y>Ад, то приведение цифровой платформы осуществляется со скоростью, выработанной в блоке 8:

где kп - коэффициент усиления сигнала приведения.
Таким образом, применение заявленного изобретение обеспечит повышение точности измерения выходных углов ориентации за счет подавления вибрационных и шумовых воздействий на летательный аппарат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
Изобретение относится к системам ориентации и навигации летательных аппаратов, в частности к бесплатформенным гировертикалям, курсовертикалям и навигационным системам, в которых измерительная информация поступает с датчиков угловых скоростей и акселерометров. Способ управления цифровой платформой в бесплатформенной гировертикали включает измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную систему координат, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат и приведение цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат. При этом линейные ускорения в связанной системе координат предварительно фильтруются, а величина угловой скорости приведения цифровой платформы из зоны превышения допустимых для управления значений величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат устанавливается в зависимости от величины линейных ускорений в инерциальной системе координат и значения признака включения приведения платформы в зону допустимых для управления значений линейных ускорений в инерциальной системе координат, за счет чего обеспечивается компенсация вибрационных и шумовых воздействий на гировертикаль. Технический результат - повышение точности измерения выходных углов ориентации объекта. 2 н.п. ф-лы, 1 ил.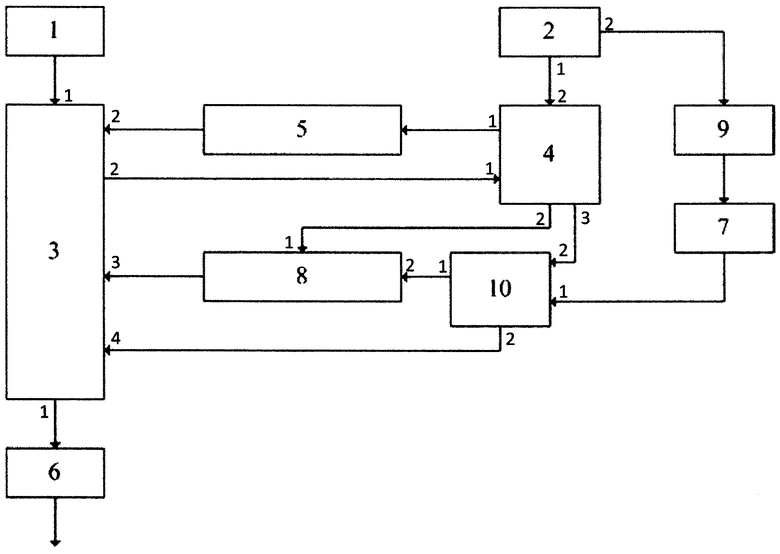
1. Способ управления цифровой платформой в бесплатформенной гировертикали путем приведения цифровой платформы в зону управления микромеханической гировертикали, включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную систему координат, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат и приведение цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат, отличающийся тем, что линейные ускорения в связанной системе координат предварительно фильтруются, а величина угловой скорости приведения цифровой платформы из зоны превышения допустимых для управления значений величин линейных ускорений в инерциальной системе координат в зону допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат устанавливается в зависимости от величины линейных ускорений в инерциальной системе координат и значения признака включения приведения платформы в зону допустимых для управления значений линейных ускорений в инерциальной системе координат.
2. Бесплатформенная гировертикаль, содержащая трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок пересчета линейных ускорений из связанной системы координат в инерциальную, блок управления цифровой платформой, блок приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы, при этом блок цифровой платформы соединен первым входом с выходом блока датчиков угловых скоростей, вторым входом с выходом блока управления цифровой платформой, третьим входом с выходом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, первым выходом со входом блока вычисления углов крена и тангажа и вторым выходом с первым входом блока пересчета линейных ускорений из связанной системы координат в инерциальную, который вторым входом соединен с первым выходом трехосного блока датчиков линейных ускорений, первым выходом со входом блока управления цифровой платформой и вторым выходом с первым входом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, отличающаяся тем, что дополнительно введены блок фильтрации линейных ускорений в связанной системе координат и блок анализа величины линейных ускорений в инерциальной системе координат и признака включения приведения цифровой платформы, причем вход блока фильтрации линейных ускорений в связанной системе координат соединен со вторым выходом трехосного блока датчиков линейных ускорений, а выход со входом блока включения приведения цифровой платформы, блок анализа величины линейных ускорений в инерциальной системе координат и признака включения приведения цифровой платформы первым входом соединен с выходом блока включения приведения цифровой платформы, вторым входом с третьим выходом блока пересчета линейных ускорений из связанной системы координат в инерциальную, первым выходом со вторым входом блока приведения цифровой платформы в зону допустимых значений линейных ускорений в инерциальной системе координат, а вторым выходом соединен с четвертым входом блока цифровой платформы.
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| US 20160047675 A1, 18.02.2016. | |||

