Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей угловых скоростей и линейных ускорений с цифровым выходом информации [1-3].
Одним из основных требований, предъявляемым к гироскопическим датчикам - гироскопам и акселерометрам, при их использовании в пилотажных системах управления летательными аппаратами, является обеспечение минимального уровня шумовой составляющей в их выходных сигналах.
Известными и широко распространенными способами подавления шумовой составляющей в выходных сигналах гироскопических датчиков с цифровым выходом информации является использование разнообразных цифровых фильтров, в которых подавление шумовой составляющей осуществляется путем установления в фильтре временной задержки [4, 5, 6],
Основным недостатком таких фильтров является возникновение большого фазового запаздывания выходного сигнала датчика, вызванное временной задержкой, что делает в ряде случаев невозможным использование датчиков в системах управления летательными аппаратами.
Прототипом предлагаемого изобретения является полурекурсивный цифровой фильтр [7], описываемый следующим уравнением:

где ωj - постоянные во времени весовые коэффициенты полурекурсивного фильтра (j=0, 1,…, N); М - параметр, указывающий на то, как далеко вперед предусматривается входной процесс; у(nТ) - выходной сигнал в n-й момент времени, х(nТ) - входной сигнал в n-й момент времени.
Для двухзвенного цифрового фильтра, реализуемого в датчиках угловых скоростей, уравнение (1) записывается в виде:

где k1=β/(β+1); k2=1/(β+1); β=Т/Т0; Т - постоянная фильтра; T0=1/ ;
;  - частота выдачи информации; n - тактовая частота выдачи информации; ωвых(n) - выходной сигнал об угловой скорости на текущем такте выдачи информации; ωвых(n-1) - выходной сигнал об угловой скорости на предыдущем такте выдачи информации; ωвх(n) - входной сигнал об угловой скорости на текущем такте выдачи информации.
- частота выдачи информации; n - тактовая частота выдачи информации; ωвых(n) - выходной сигнал об угловой скорости на текущем такте выдачи информации; ωвых(n-1) - выходной сигнал об угловой скорости на предыдущем такте выдачи информации; ωвх(n) - входной сигнал об угловой скорости на текущем такте выдачи информации.
При использовании такого фильтра степень фильтрации сигнала ограничивается допустимым фазовым запаздыванием на рабочей частоте измеряемой угловой скорости. Например, для систем управления гражданскими самолетами фазовое запаздывание не должно превышать 18°.
Задачей изобретения является возможность обеспечения заданного уровня цифровой фильтрации шумовой составляющей в выходном сигнале датчика при минимальном фазовом запаздывании, что является в ряде случаев решающим аргументом для возможности использования датчиков в комплексных системах управления летательными аппаратами.
Поставленная задача решается предложенным способом цифровой фильтрации шумовой составляющей выходного сигнала в инерциальных датчиках, в котором цифровая фильтрация шумовой составляющей выходного сигнала инерциального датчика осуществляется путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала шумовой составляющей заданной величины с учетом ее знака.
Сущность изобретения поясняется следующими иллюстрациями:
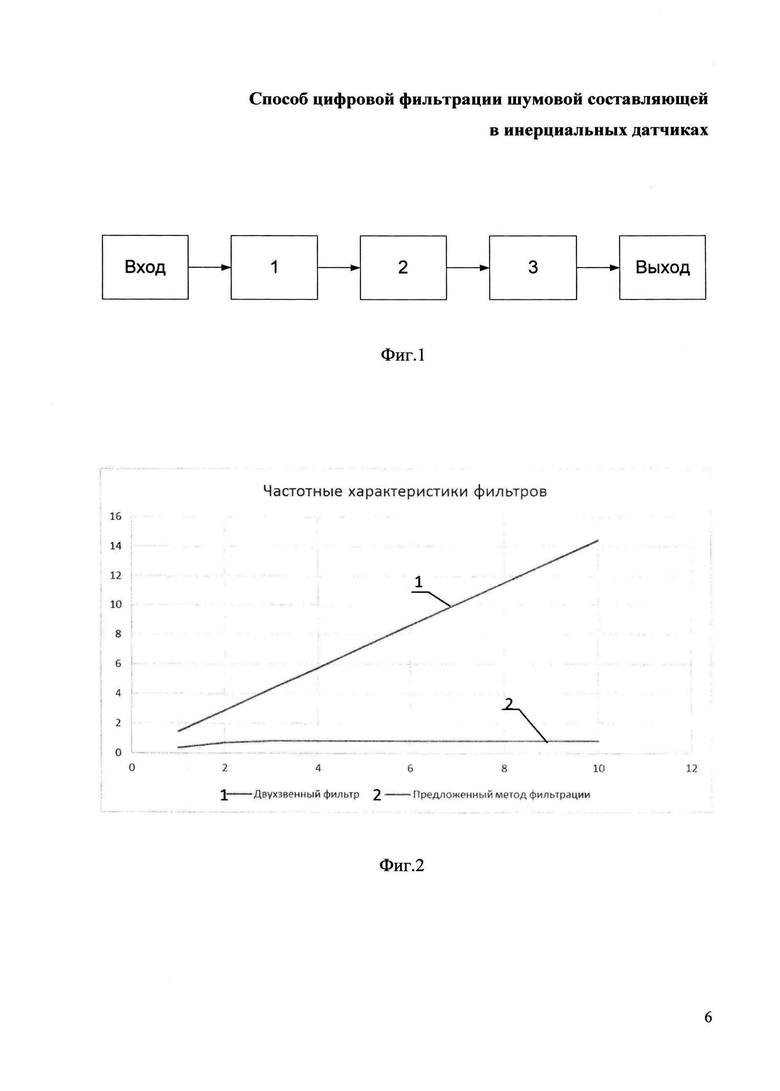
Фиг. 1 - структурно-функциональная схема алгоритма цифровой фильтрации согласно предложенному способу фильтрации;
Фиг. 2 - фазовые характеристики двухзвенного фильтра и фильтра согласно предложенному способу фильтрации;
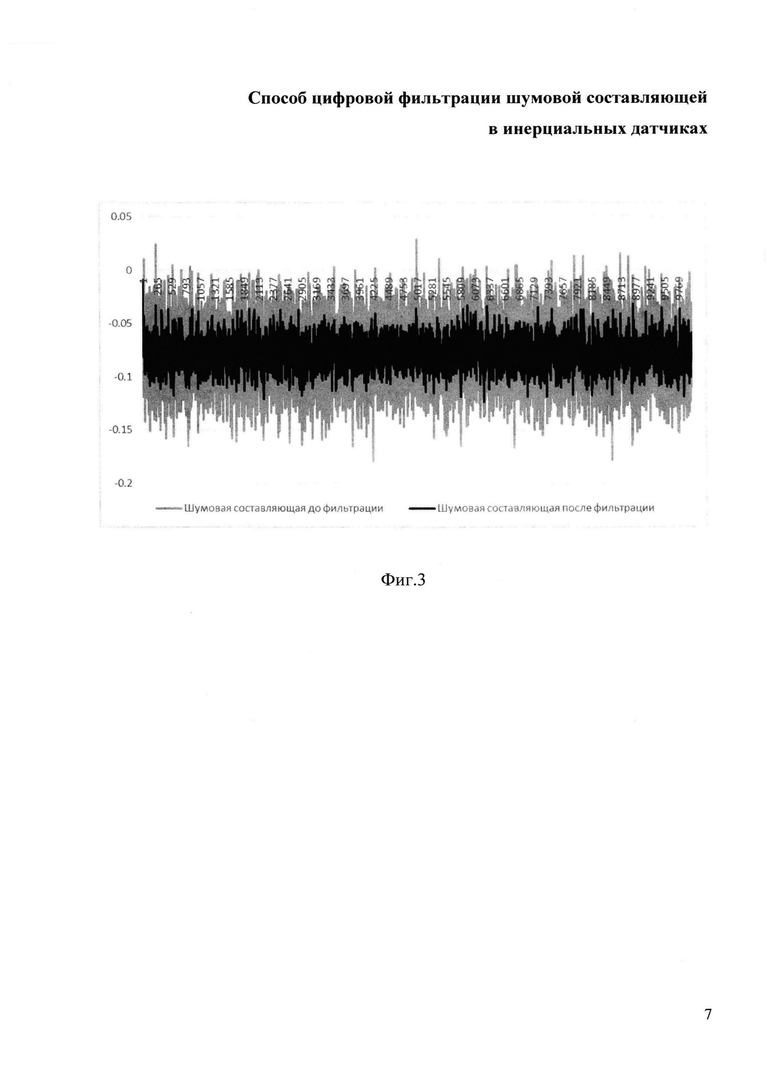
Фиг. 3 - нефильтрованный и отфильтрованный шумовой сигнал согласно предложенному способу фильтрации.
Реализуется изобретение следующим образом. В блоке 1 (Фиг. 1) осуществляется прием измеряемого сигнала и расчет его скользящего среднего значения на интервале ΔT по N тактам. В блоке 2 принимается значение входного сигнала на такте (N+1), из него вычитается среднее значение входного сигнала, определенного на ΔT интервале, и определяется знак полученной разности. В блоке 3 осуществляется вычитание заданного уровня помехи Δσ из входного сигнала, измеренного на (N+1) такте. Полученный результат идет на выход алгоритма. Далее на последующих тактах измерений процедура, изложенная выше, повторяется.
На Фиг. 2 приведены для сравнения результаты моделирования фильтрации, произведенные по прототипу - двухзвенному цифровому фильтру, и по предложенному способу цифровой фильтрации. Моделирование производилось для одинакового массива данных угловой скорости, экспериментально снятой с микромеханического гироскопа китайской фирмы МТ Microsystems MSG1100D-300, и принимался одинаковый уровень снижения шумовой составляющей - σф/σ=0,52 (Фиг. 3).
Как видно из приведенных графиков (Фиг. 2), использование предложенного метода цифровой фильтрации позволяет многократно уменьшить фазовое запаздывание по сравнению с прототипом. Это чрезвычайно важно для повышения качества регулирования при использовании инерциальных датчиков первичной информации в комплексных системах управления летательных аппаратов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Кузнецов А.Г., Абутидзе З.С., Портнов Б.И., Галкин В.И., Калик А.А. Микромеханические датчики для пилотажных систем управления // Гироскопия и навигация. 2010, №2(69). С. 50-56.
2. ST Microelectronics (США), каталог микромеханических приборов, www.st.com.
3. Sensonor A.S. (Норвегия), гироскоп STIM-210, www.sensonor.com.
4. МТ Microsestems (Китай), каталог микромеханических приборов, www.cetcmems.com.
5. Г. Лэм Аналоговые и цифровые фильтры. Перевод с английского, М.: «Мир», 1982, 592 с.
6. Введение в цифровую фильтрацию. Под редакцией Р. Богнера и А. Константинидиса. Перевод с английского, М.: «Мир», 1975, 216 с.
7. И.А. Мизин, А.А. Матвеев Цифровые фильтры (анализ, синтез, реализация с использованием ЭВМ). - М.: Связь, 1979. - 240 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОЙ ФИЛЬТРАЦИИ ШУМОВОЙ СОСТАВЛЯЮЩЕЙ В ИНЕРЦИАЛЬНЫХ ДАТЧИКАХ | 2019 |
|
RU2717552C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Способ определения угла крена быстровращающегося летательного аппарата | 2024 |
|
RU2823718C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2691551C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ПЛАТФОРМОЙ В БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667320C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| Устройство для измерения ускорения | 2023 |
|
RU2808728C1 |
Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей угловых скоростей и линейных ускорений с цифровым выходом информации. Задачей изобретения является возможность обеспечения заданного уровня цифровой фильтрации шумовой составляющей в выходном сигнале датчика при минимальном фазовом запаздывании, что является в ряде случаев решающим аргументом для возможности использования датчиков в комплексных системах управления летательными аппаратами. Поставленная задача решается предложенным способом цифровой фильтрации шумовой составляющей выходного сигнала в инерциальных датчиках, в котором цифровая фильтрация шумовой составляющей выходного сигнала инерциального датчика осуществляется путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала шумовой составляющей заданной величины с учетом ее знака. 3 ил.
Способ цифровой фильтрации шумовой составляющей в инерциальных датчиках, отличающийся тем, что цифровая фильтрация шумовой составляющей выходного сигнала инерциального датчика осуществляется путем выделения из выходного сигнала датчика на заданном интервале времени его среднего значения, определения на последующем участке времени знака шумовой составляющей относительно среднего значения выходного сигнала, определенного на предыдущем интервале времени, и вычитания из выходного сигнала шумовой составляющей заданной величины с учетом ее знака.
| И.А | |||
| Мизин, А.А | |||
| Матвеев | |||
| Цифровые фильтры (анализ, синтез, реализация с использованием ЭВМ) | |||
| -М.: Связь, 1979, 240 с | |||
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 2008 |
|
RU2366961C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ В СИСТЕМАХ УПРАВЛЕНИЯ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362173C1 |
| Устройство для измерения скорости движения объекта | 1990 |
|
SU1789933A1 |
| US 7746476 B2, 29.06.2010. | |||

