Изобретение относится к области робототехники и может быть использовано для управления наземным робототехническим комплексом или их группой в обороне.
Известен способ управления подвижным роботом [Патент России N2619542, 2015г.], включающий установку на подвижном роботе камеры и управление роботом с использованием программируемого устройства управления, посредством упомянутой камеры получают изображение местности, указывают конечную точку, в которой должен оказаться робот, на полученном изображении, отображенном на мониторе посредством приложения или веб-сайта через интерфейс, запущенный на упомянутом программируемом устройстве управления, показывающем видео с камеры робота, с использованием оптических параметров камеры вычисляют координаты конечной точки в системе координат, связанной с роботом, осуществляют обнаружение препятствий с помощью установленного на подвижном роботе сканирующего лазерного дальномера и осуществляют автоматическое перемещение робота в конечную точку по спланированной траектории с объездом им статических и динамических препятствий, при этом рассчитывают требуемые угловую и поступательную скорости движения робота с минимальным отклонением от спланированной траектории.
Данный способ предназначен для решения единственной задачи – управления движением одного робота, кроме того задача решается с помощью статического алгоритма и не предусматривает автоматическое развитие модели поведения в различных ситуациях.
В качестве прототипа выбран способ автоматического управления наземным робототехническим комплексом [Патент России N2574938, 2014 г.]. Данный способ включает радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса, при потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока.
К недостаткам прототипа следует отнести невозможность группового управления робототехническими комплексами, а также узкий круг задач и условий их автоматического выполнения.
В настоящее время наиболее актуальной является тема разработки автоматических систем управления робототехническими комплексами военного назначения и их группами. Основными способами ведения боевых действий являются оборона и нападение, при этом у обороняющейся стороны имеется преимущество, обусловленное пониженными требованиями к решению динамических задач маневрирования и разведки местности.
Задачей изобретения является организация автоматического управления наземным робототехническим комплексом или их группой в обороне на основе саморазвивающихся алгоритмов с элементами искусственного интеллекта.
Сущность способа автоматического управления наземным робототехническим комплексом или их группой в обороне заключается в наличии радиообмена между пультом управления и робототехническим комплексом, обеспечении ввода и обработки входной информации, поступающей от бортовых датчиков, при получении задания, для группы формируют групповую систему связи и управления, принимают тактическое решение на основе базовой модели управления, занимают соответствующие позиции, составляют при этом подробную карту окружающей обстановки в пределах эффективных расстояний выполнения соответствующих задач; при отсутствии боевого соприкосновения моделируют отражение нападения с учетом возможности смены позиций, порядка поражения целей, группового взаимодействия и противодействия противника, ранжируют полученные модели по прогнозируемому эффекту, принимают лучшую модель в качестве новой, сохраняют ее в памяти робототехнических комплексов и, по возможности, во внешней базе данных; в бою распределяют и поражают цели в соответствии с новой, а при ее отсутствии, с базовой моделью, сохраняют информацию о ходе боя в памяти робототехнических комплексов и, по возможности, во внешней базе данных; после боя корректируют ранг действовавшей модели в соответствии с проявленной боевой эффективностью, сохраняют образы моделей с лучшими рангами в качестве базовых и распространяют их на всю группировку робототехнических комплексов подобного класса.
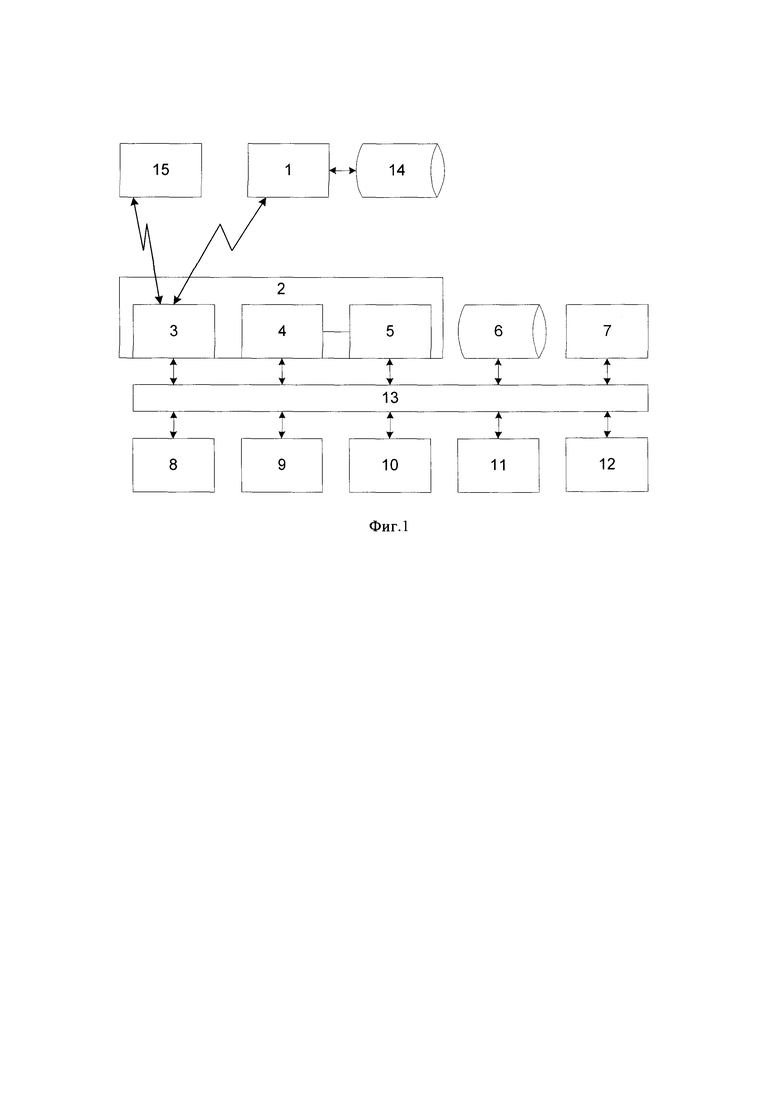
Предполагаемый комплекс, реализующий предложенный способ содержит следующие блоки (фиг.1): 1 - пульт управления, 2 –
виртуальное устройство групповой связи и управления, включающее устройство связи – 3, устройство решающее – 4 и оперативную память - 5, 6 - база данных высокой защищенности, 7 - устройство ввода и обработки входной информации от внутренних датчиков, 8 - блок обработки оптической информации, 9 - устройство ввода и обработки информации об окружающей среде, 10 - устройство планирования и управления движением, 11 - устройство управления вооружением, 12 - устройство управления энергетической установкой, 13 – шина данных, 14 – внешняя база данных, 15 - устройство связи других комплексов.
Блок 1 связан с блоком 14 и имеет двусторонний радиообмен с блоком 3, который имеет возможность групповой связи с однотипными блоками 15, блок 4 обрабатывает информацию блока 5, при этом блоки с 3 по 12 обмениваются информацией через блок 13.
Комплекс функционирует следующим образом.
В случае получения группового задания формируют блок 2 за счет распределения каналов связи и вычислительных ресурсов комплексов в группе на основе специальных моделей управления блоками 3, 4 и 5 загружаемых из блоков 6, при этом образуется устройство управления более высокого уровня. Блоки 3, 4 и 5 блока 2 выполняют те же функции, что и в единичном комплексе, с той разницей, что информация в блоке 5 представлена интегральными показателями отдельных комплексов группы, модели принятия решений учитывают групповое взаимодействие комплексов и не управляют непосредственно их ресурсами. Поэтому принцип работы блока 2 в части принятия тактических решений идентичен единичным комплексам, по отношению к которым он выступает в качестве блока 1.
Модели управления комплексом должны проявлять гибкость в обработке исходных данных, а значит содержать элементы искусственного интеллекта, более того, некоторые модели управления блоков могут быть также построены с использованием принципов самомодификации.
Далее принцип функционирования будет рассматриваться на примере единичного комплекса.
При включении комплекса из блока 6 через блок 13 под управлением блока 4 загружают модели управления блоков 3, 8, 12. В блоке 7 производится опрос и обработка входной информации от бортовых датчиков определяется конфигурация, местоположение и положение комплекса в пространстве, блок 11 формирует информацию о составе вооружения и боекомплекте, а так же управляет наведением
оружия на цель, блок 12 организует управление устройствами генерации, накопления и распределения энергетических ресурсов в соответствии с установленным режимом, в нем формируется информация об энергетическом ресурсе устройства. Информация блоков 7, 11, 12 размещается в специальной области блока 5 и динамически обновляется.
Блок 3 поддерживает радиообмен с блоком 1, на котором ожидается получение задания. При получении задания в блоке 4 принимается решение о формировании блока 2 на основе информации о составе группы: индивидуальное или групповое задание. Из блока 6 в блоки 3, 4, 5 загружаются соответствующие заданию модели управления, организации связи и распределения вычислительных ресурсов. Обмен информацией между комплексами в группе организуется через блок 3 в соответствии с загруженной моделью. Информацию о задании, включающую зону обороны, сведения о дружественных и ожидаемых силах противника, электронную карту местности и другую необходимую для выполнения задания информацию из блока 14 посредством радиообмена через блоки 1 и 3 размещают в структурированном виде в блоке 5.
Используя данные о ресурсе комплекса, полученного задания и карты местности на основе базовой модели управления в блоке 4 принимают предварительное тактическое решение в виде оборонительных позиций, формируют предварительный маршрут, который загружают в блок 10. Комплекс или их группа занимает позиции в соответствии с принятым тактическим решением, в движении в блоке 4 обрабатывается информация от блоков 7, 8 и 9, в которые загружены модели обработки информации из блока 6, позволяющие производить подробное моделирование окружающей обстановки на эффективную глубину работы приборов сканирования, а на основе построенной модели корректировать маршрут в блоке 10.
По прибытии на позицию, в блоки 8 и 9 загружают модели обнаружения, распознавания и сопровождения целей, блок 11 переводят в боевой режим.
При отсутствии боевого соприкосновения в блок 4 из блока 6 подгружают задачу коррекции модели на основе моделирования развития обстановки с учетом данных о противнике, прогноза результатов его противодействия и составленной подробной модели местности. При этом задача коррекции модели подразумевает свойство вариативности выбора позиций, порядка взаимодействия в группе и уничтожения целей.
Наличие аппарата оценки эффективности модели обеспечивает свойство саморазвития управления. Полученные модели ранжируют по
прогнозируемому эффекту. Лучшую модель принимают в качестве новой, сохраняют в блоке 6, а при наличии обмена информацией с блоком 1 и в блоке 14. Новая модель загружается в блок 5 взамен базовой. При необходимости комплексы занимают новые позиции.
При обнаружении противника блоками 8 и (или) 9 и принятии решения на поражение в блоке 4, информацию о его координатах и типе передают в блок 11, который осуществляет захват цели собственными средствами контроля наведения, выбирает эффективный тип оружия, боеприпаса и режим ведения огня в соответствии с собственной моделью принятия решения, по готовности производит уничтожение цели.
В случае воздействия противника на каналы связи или введение режима радиомолчания группа комплексов выполняет задание в пределах установленных действующей моделью зон ответственности, контролируя при этом фронт на всю доступную глубину. При наличии возможности и ресурса цели вне распределенной зоны ответственности робототехнического комплекса могут быть поражены в соответствии с установленной моделью.
Информацию о ходе боя сохраняют в блоке 6 и по возможности передают в блок 14 через блок 1 для последующего анализа.
По итогам боя производится ранжирование действовавших моделей в соответствии с достигнутыми результатами. Образы моделей с лучшими рангами сохраняют в блоке 6 и 14 в качестве базовых. При этом обновленные базовые модели распространяются на всю доступную группировку устройств одного класса.
Таким образом, как видно из описания функционирования предполагаемого комплекса, он способен выполнять поставленную задачу обороны за счет моделей организации автоматического управления, в том числе группового, на основе саморазвивающихся алгоритмов с элементами искусственного интеллекта.
Важным свойством предлагаемого способа автоматического управления робототехническим комплексом или их группой в обороне является возможность развития системы управления использующей данный способ на основе имитационного моделирования выполнения задач обороны в различных условиях на базе специального игрового сервера или многопользовательских онлайн игр, в том числе с применением интеллектуальных игровых ботов, обученных на нападение.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
| КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОГО ПОРАЖЕНИЯ ЦЕЛЕЙ НА ОСНОВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2759534C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 1988 |
|
RU2024818C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
Изобретение относится к области робототехники и может быть использовано для автоматического управления группой наземных робототехнических комплексов. При получении задания формируют групповую систему связи и управления для группы комплексов, принимают тактическое решение на основе базовой модели управления, составляют подробную карту окружающей обстановки. В отсутствии боевого соприкосновения корректируют модель, а в бою распределяют и поражают цели в соответствии с действующей моделью. После боя корректируют ранг действовавшей модели в соответствии с проявленной боевой эффективностью, сохраняют образы моделей с лучшими рангами в качестве базовых и распространяют их на всю группировку робототехнических комплексов подобного класса. В результате обеспечивается организация автоматического управления комплексами на основе саморазвивающихся алгоритмов с элементами искусственного интеллекта. 1 ил.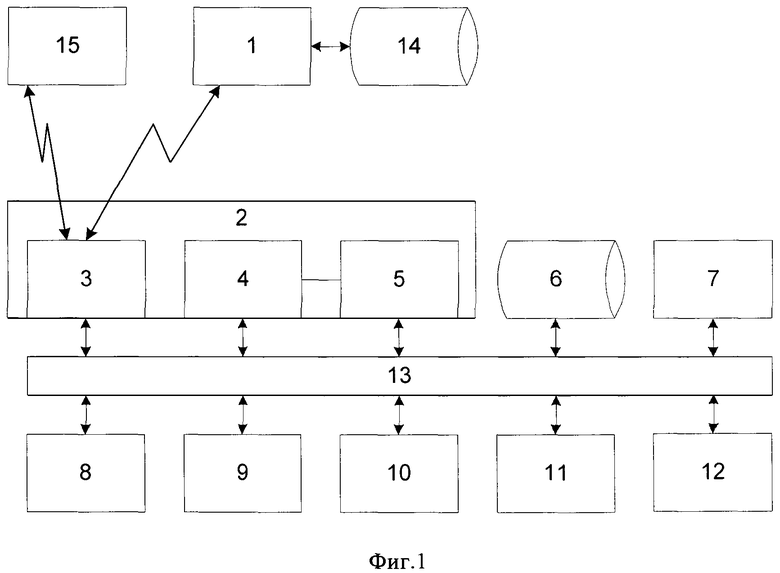
Способ автоматического управления группой наземных робототехнических комплексов в обороне, включающий радиообмен между пультом управления и робототехническими комплексами, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, отличающийся тем, что при получении задания формируют групповую систему связи и управления, принимают тактическое решение на основе базовой модели управления, после занятия комплексами соответствующих позиций составляют подробную карту окружающей обстановки в пределах эффективных расстояний выполнения соответствующих задач, при отсутствии боевого соприкосновения моделируют отражение нападения с учетом возможности смены позиций, порядка поражения целей, группового взаимодействия и противодействия противника, ранжируют полученные модели по прогнозируемому эффекту, принимают модель с лучшим рангом в качестве новой, которую сохраняют в памяти робототехнических комплексов и, при возможности, во внешней базе данных, при этом в бою распределяют и поражают цели в соответствии с новой моделью или с базовой моделью, сохраняют информацию о ходе боя в памяти робототехнических комплексов и, при возможности, во внешней базе данных, а после боя корректируют ранг действовавшей модели в соответствии с проявленной боевой эффективностью, сохраняют образы моделей с лучшими рангами в качестве базовых и распространяют их на всю группировку робототехнических комплексов подобного класса.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| CN 0105511427 A, 20.04.2016 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОНОАРЙЛМОЧЕВЙНiiw | 0 |
|
SU173747A1 |

