Изобретение относится к радиотехническим системам определения координат источников радиоизлучения (ИРИ) и может быть использовано в системах радиомониторинга при решении задач скрытого определения координат ИРИ, в частности для определения координат с транспортного средства, а также в навигационных средствах.
Наиболее близким по своей технической сущности к заявленному способу является способ определения координат ИРИ с борта летательного аппарата (Патент RU №2619915 С1, МПК G01S 1/08, G01S 5/04 - 19.05.2017, Бюл. №14). Способ основан на измерении трех ортогональных составляющих вектора напряженности электрического поля, формировании вспомогательной плоскости проходящей через центр бортовой антенной системы летательного аппарата и перпендикулярной вектору напряженности электрического поля и определения положения ИРИ как линии положения ИРИ как линии пересечения вспомогательной плоскости с поверхностью земли и вычисления координат ИРИ в точке пересечения линий положения ИРИ.
Данное изобретение принято за прототип.
К недостатком данного способа и, как следствие систем в которых он может быть реализован, следует отнести
1. Невозможность определения координат нескольких ИРИ, излучение которых не различаются по частоте и времени приема.
2. Высокий объем входных данных связанных с необходимостью иметь информацию о профиле земной поверхности.
3. Высокая погрешность определения координат ИРИ связанная с погрешностью измерения геометрической высоты полета.
Задачей заявляемого изобретения является создание системы, предназначенного для определения координат, по меньшей мере одного ИРИ. Полезность заявленного способа определения координат ИРИ заключается в возможности скрытного обнаружения по меньшей мере одного ИРИ одновременно излучающих на разных частотах или работающих в разное время на одной частоте.
Техническим результатом заявленного изобретения является возможность обнаружения неограниченного числа ИРИ, увеличение точности определения координат ИРИ и помехоустойчивости.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе определения координат источников радиоизлучения используется или по меньшей мере одно транспортное средство включающее по меньшей мере одну антенную систему, или по меньшей мере две антенные системы установленные на различных носителях стационарных и/или передвижных, особенность заключается в том, что антенная система измеряет три компоненты вектора напряженности электрического поля и три компоненты вектора напряженности магнитного поля, каждую компоненту подвергают преобразованию Фурье в частотную область, производят векторное произведение комплексных векторов напряженности электрического и магнитного полей в частотной области, тем самым получают вектор Пойтинга, в частотной области находят несущие частоты ИРИ, находят пеленг на ИРИ как среднее арифметическое направлений вектора Пойтинга в земной системе координат несущей частоты ИРИ и ряда частот расположенных рядом с несущей частотой ИРИ, при этом весовые коэффициенты либо равны единице, либо равны соотношению энергии сигнала на этой частоте к энергии сигнала на несущей частоте ИРИ, либо соотношению десятичного логарифма энергии сигнала на этой частоте к десятичному логарифму энергии сигнала на несущей частоте ИРИ, окончательно координаты ИРИ находят триангуляционным методом от двух разных точек измерений.
Преимуществом, обеспечиваемым приведенной совокупностью признаков, является увеличение точности определения координат ИРИ, кроме того увеличивается помехоустойчивость, это обеспечивается тем, что количество измерении компонент векторов поля сотни и тысячи, а последующее преобразование Фурье уменьшает влияние ошибок измерений. Кроме того, нахождение пеленга как среднего арифметического направлений вектора Пойтинга полученных для несущей частоты ИРИ и частот расположенных рядом с этой несущей частотой ИРИ, также увеличивает помехоустойчивость и точность определения координат ИРИ.
Способ пеленгования ИРИ основан на измерении n-раз компонент векторов напряженности электрического и магнитного поля через равные промежутки времени. Полученные значения подвергаются преобразованию Фурье. Комплексные элементы ряда Фурье найдутся как
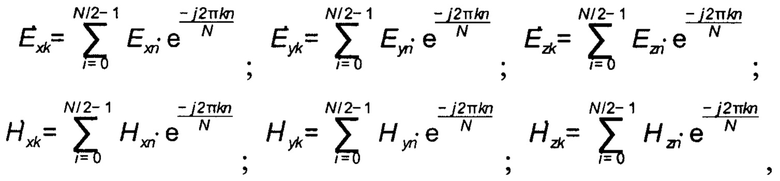
где  - комплексные элементы рядов Фурье;
- комплексные элементы рядов Фурье;
Exn, Eyn, Ezn, Hxn, Hyn, Hzn - измеренные значения векторов поля;
N - число измерений.
Частота vk к-ой гармоники:
vk=kv0.
где v0 - минимальная частота;
dt - интервал измерений.
В частотной области находится вектор Пойтинга  для к-ого элемента ряда Фурье, как векторное произведение векторов напряженности электрического и магнитного поля в частотной области:
для к-ого элемента ряда Фурье, как векторное произведение векторов напряженности электрического и магнитного поля в частотной области:
где  - k-й вектор напряженности электрического поля в частотной области;
- k-й вектор напряженности электрического поля в частотной области;
 - k-й вектор напряженности магнитного поля в частотной области.
- k-й вектор напряженности магнитного поля в частотной области.
Несущая частота ИРИ находится исходя из условия максимума амплитуды и перемены знака фазы вектора Пойтинга в частотной области.
Направление вектора Пойтинга в земной системе координат найдется как угол между вектором образованным вещественными частями комплексного вектора Пойтинга и соответствующими осями земной системы координат.
Пеленг на i-й ИРИ найдется как среднее арифметическое направлений вектора Пойтинга в земной системе координат несущей частоты ИРИ и ряда частот расположенных рядом с несущей частотой ИРИ, при этом весовые коэффициенты либо равны единице, либо равны соотношению энергии сигнала на этой частоте к энергии сигнала на несущей частоте ИРИ, либо соотношению десятичного логарифма энергии сигнала на этой частоте к десятичному логарифму энергии сигнала на несущей частоте ИРИ.
Окончательно, координаты ИРИ находят триангуляционным методом от двух разных точек измерений. Для этого определяют координаты антенных систем, а координаты ИРИ определяют в месте пересечения пеленгов двух разных точек измерения.
Данное изобретение имеет несколько особенностей:
1. Оптимальным количеством измерений компонент векторов поля является число равным 2N, где N - целое число. Это связано с тем, что в данном случае возможно будет проводить быстрое преобразование Фурье, существенно увеличив скорость преобразования.
2. Диапазон частот регистрируемых ИРИ определится как
vmax=0.5Nv0 - максимальная частота пеленгации ИРИ;
 - минимальная частота ИРИ.
- минимальная частота ИРИ.
3. Применение одной антенной системы, установленной на транспортное средство, позволяет определять координаты стационарных ИРИ. Определение места при этом происходит с некоторой задержкой, связанной с тем что определение ИРИ происходит с опорой на измерения которые накапливаются в течении некоторого времени.
4. Две и более антенные системы: стационарные и/или передвижные, работающие вместе позволяют мгновенно определять, как стационарные ИРИ, так и двигающиеся.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2714502C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
Изобретение относится к радиотехническим системам определения координат источника радиоизлучений (ИРИ) и может быть использовано в системах радиомониторинга при решении задач скрытого определения координат источников радиоизлучений, в частности для определения координат с транспортного средства, а также в навигационных средствах. Техническим результатом заявленного изобретения является возможность обнаружения по меньшей мере одного ИРИ, увеличение точности определения координат ИРИ и помехоустойчивости. Способ определения координат источников радиоизлучений осуществляют либо с борта транспортного средства, включающего одну или несколько антенных систем, либо посредством двух и более антенных систем, установленных на различных стационарных и/или передвижных носителях. Антенные системы измеряют три компоненты вектора напряженности электрического поля и три компоненты вектора напряженности магнитного поля, каждую компоненту подвергают преобразованию Фурье в частотную область, производят векторное произведение комплексных векторов напряженности электрического и магнитного полей в частотной области, тем самым получают вектор Пойтинга. В частотной области находят несущие частоты ИРИ, находят пеленг на ИРИ как среднее арифметическое направлений вектора Пойтинга в земной системе координат несущей частоты ИРИ и ряда частот расположенных рядом с несущей частотой ИРИ. Весовые коэффициенты при вычислении среднего арифметического либо равны единице, либо равны соотношению энергии сигнала на этой частоте к энергии сигнала на несущей частоте ИРИ, либо соотношению десятичного логарифма энергии сигнала на этой частоте к десятичному логарифму энергии сигнала на несущей частоте ИРИ. Окончательно координаты ИРИ находят триангуляционным методом от двух разных точек измерений.
Способ определения координат источников радиоизлучений или с борта по меньшей мере одного транспортного средства, включающего по меньшей мере одну антенную систему, или по меньшей мере двумя антенными системами, установленными на различных носителях стационарных и/или передвижных, отличающийся тем, что антенная система измеряет три компоненты вектора напряженности электрического поля и три компоненты вектора напряженности магнитного поля, каждую компоненту подвергают преобразованию Фурье в частотную область, производят векторное произведение комплексных векторов напряженности электрического и магнитного полей в частотной области, тем самым получают вектор Пойтинга, в частотной области находят несущие частоты ИРИ, находят пеленг на ИРИ как среднее арифметическое направлений вектора Пойтинга в земной системе координат несущей частоты ИРИ и ряда частот, расположенных рядом с несущей частотой ИРИ, при этом весовые коэффициенты либо равны единице, либо равны соотношению энергии сигнала на этой частоте к энергии сигнала на несущей частоте ИРИ, либо соотношению десятичного логарифма энергии сигнала на этой частоте к десятичному логарифму энергии сигнала на несущей частоте ИРИ, окончательно координаты ИРИ находят триангуляционным методом от двух разных точек измерений.
| US 2009070053 A1, 12.03.2009 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| JP 2007263789 A, 11.10.2007 | |||
| US 7440858 B2, 21.10.2008 | |||
| FR 2871580 A1, 16.12.2005. | |||

