Способ многоканального ультразвукового (УЗ) контроля рельсов относится к области неразрушающего контроля длинномерных изделий, в том числе, железнодорожных (ж.д.) рельсов.
Современные дефектоскопические средства (ДС) для контроля рельсового пути могут реализовать скорости сканирования до 100 км/ч. При этом проявляются разнообразные факторы, негативно влияющие на качество контроля [1]: нестабильность акустического контакта; отличие температуры контролируемых рельсов от той, при которой проводилась настройка [2]; состояние поверхности катания рельсов [3]; износ протекторов УЗ преобразователей; компрессия условных размеров отражателей [2, 4]. При одновременном воздействии нескольких факторов некоторые из них могут взаимно компенсировать друг друга, а суммарное воздействие других может привести к полной потере контроля. Оценка количественного вклада каждого фактора на конечный результат (на достоверность и надежность контроля) требует проведения сложных экспериментальных исследований и не всегда корректно выполнима.
Ж.д. рельс имеет специфический профиль, который можно разделить на три основные зоны: головку (Н), шейку (W) и подошву (В) рельса. Для надежного выявления дефектов в указанных зонах используют различные схемы прозвучивания с типовыми углами ввода УЗ колебаний (42°, 58°, 70°) с поверхности катания рельсов, единственно доступной для сплошного сканирования [5]. Так как глубины залегания и условия озвучивания искомых дефектов рельсов в этих зонах существенно отличаются (от 3 мм в головке, до 192 мм - в подошве), то и уровни фиксации и браковки дефектов должны быть адаптированы к этим зонам. К сожалению, в действующих нормативно-технических документах (НТД) и в практике контроля эти особенности учитываются редко или вовсе не учитываются, что, естественно, снижает достоверность контроля.
В связи с вышеотмеченными особенностями, поиск технических решений направленных на разработку способов динамического управления параметрами (пороговыми уровнями) выделения сигналов от дефектов в разных зонах по высоте рельса и воздействующих при высокоскоростном УЗ контроле негативных факторов, является своевременным.
Известны способы оценки реальной чувствительности контроля по авторскому свидетельству [6] и по патенту [7], где для настройки и корректировки чувствительности контроля используют специальные приспособления (пластинки для определения акустических характеристик объекта), т.е. корректируют параметры контроля по результатам измерений с учетом состояния контролируемого объекта. Недостатком известных устройств и способа является узкая область применения и невозможность их использования в широком диапазоне скоростей сканирования.
Известно устройство регулировки чувствительности каналов дефектоскопа путем использования формирователя порогового уровня по уровню структурных шумов в контролируемых длинномерных объектах (рельсах) [8]. Однако, как показала практика, оценка только уровня шумов не дает необходимой информации для корректной регулировки чувствительности. Это всего лишь приводит к непомерному возрастанию объемов файлов дефектограмм и к существенному затруднению процедуры их передачи с бортов скоростных ДС в региональные центры расшифровки для дистанционного анализа. Важно, что сильно зашумленные дефектограммы практически непригодны для визуального анализа оператором с целью выявления опасных дефектов.
Известен способ оценки работоспособности ДС при высокоскоростном контроле длинномерных объектов (рельсов) по [9], заключающийся в том, что оценку производят на разных скоростях перемещения путем анализа усредненной оценки сигналов от конструктивных элементов объекта, по которой определяют предельную скорость контроля. Недостатком известного способа является ограниченная область применения и низкая достоверность контроля. Ограниченная область применения связана с тем, что в известном способе определяется только допустимая скорость сканирования. Способ не направлен на исправление (компенсацию) воздействий неизбежных при высокоскоростном сканировании негативных факторов, что приводит к снижению качества и достоверности контроля.
Известен способ динамической калибровки УЗ дефектоскопа для контроля рельсов [10], в котором пороговый уровень срабатывания дефектоскопа задают, исходя из текущего значения амплитуды опорного сигнала, формируемого дополнительным каналом излучения/приема УЗ колебаний. Низкая достоверность известного способа вызвана тем, что информативным параметром опорного сигнала, отраженного от противоположной поверхности контролируемого изделия (головки рельса), является амплитуда сигналов дополнительного канала, с иными, чем в рабочем канале, параметрами.
Известен способ УЗ контроля рельсов [11], в котором формируют адаптивный порог на основе скорости нарастания переднего фронта принятого сигнала за заданный промежуток времени с прибавлением амплитуды шумового сигнала, а в качестве критерия полезности сигнала выбирают превышение амплитуды сигнала над пороговым уровнем.
Известен способ корректировки чувствительности УЗ рельсового дефектоскопа по [12], заключающийся в корректировке чувствительности каналов ДС по уровню амплитуд эхо-сигналов от однотипных конструктивных элементов (болтовых отверстий) объекта. Недостатками известного способа [12], являются ограниченная область применения и низкая достоверность контроля, вызванные неполным использованием информативных признаков эхо-сигналов от конструктивных отражателей для корректировки чувствительности контроля: также, как и в рассмотренных выше технических решениях [9 и 10], для этих целей используются только амплитуды сигналов.
Как известно [1], и подтверждено в патентах [9 и 13], при УЗ контроле длинномерных изделий ограниченных размеров (размеры сечений изделия сравнимы с размером УЗ пучка), в том числе, и рельсов, более информативной характеристикой сигналов является интегральная характеристика, одновременно учитывающая амплитуды каждого эхо-импульса от отражателя и условные размеры пачек (групп) сигналов от отражателя, принимаемых в процессе сканирования изделия.
Известен способ динамической корректировки чувствительности многоканальных ДС при высокоскоростном контроле длинномерных объектов [14], в том числе, и ж.д. рельсов, заключающийся в перемещении ДС по контролируемому объекту в определенном диапазоне скоростей, в периодическом излучении в контролируемый объект УЗ зондирующих сигналов, в осуществлении приема и регистрации сигналов, отраженных от однотипных конструктивных элементов объекта, в измерении их параметров, по которым корректируют чувствительность каналов ДС, при этом измеряют текущую скорость контроля, предварительно формируют набор данных сигналов от конструктивных элементов на разных скоростях и чувствительностях контроля, на основе набора данных устанавливают зависимости между усредненными параметрами сигналов, чувствительностью и скоростью контроля, при выполнении рабочего контроля по измеренным при текущей скорости параметрам сигналов от конструктивных элементов вычисляют необходимую величину корректировки чувствительности каналов дефектоскопического средства.
Недостатками известного способа [14], принятого за прототип, являются сложность реализации, вызванная необходимостью предварительного получения набора данных сигналов на разных скоростях, регулировки чувствительности с учетом скорости сканирования по всем каналам многоканального дефектоскопического средства, низкая достоверность контроля, связанная с отсутствием учета особенностей озвучивания разных по высоте объекта зон контроля.
Задачей, решаемой в заявляемом способе, является повышение достоверности контроля и упрощение реализации способа многоканального УЗ контроля рельсов в широком диапазоне скоростей сканирования путем введения адаптивных порогов выделения сигналов от возможных дефектов в разных зонах сечения рельса.
Для решения поставленной задачи в способе многоканального ультразвукового контроля, на рельсы устанавливают ДС с электроакустическими преобразователями (ЭАП) с разными направлениями излучения-приема, озвучивающие отдельные зоны по высоте рельса, преобразователи совместно перемещают вдоль рельса, периодически всеми каналами излучают в контролируемый рельс УЗ зондирующие сигналы, принимают и регистрируют сигналы, отраженные от возможных дефектов и от конструктивных элементов рельсов (отверстий и торцов рельсов в зоне болтовых стыков), оценивают параметры сигналов, причем для каждой зоны рельса выделяют конструктивный элемент, сигналы от которого используют в качестве опорного отражателя, в качестве параметра сигналов используют интегральную характеристику, определяют и усредняют интегральные характеристики сигналов (ИХС) от серии опорных отражателей, предварительно определяют соотношения между интегральными характеристиками сигналов от опорных отражателей и от искомых дефектов рельсов, на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов в соответствующих каналах ДС.
В частном случае, в качестве опорных отражателей выбирают один тип конструктивного элемента рельсов, формирующий наиболее стабильные сигналы в процессе контроля рельсов, усредненные интегральные характеристики от данных отражателей принимают в качестве опорного уровня, предварительно определяют соотношения между ИХС от искомых дефектов в каждой зоне рельсов и выбранным опорным отражателем, и на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов в соответствующих каналах ДС.
Существенными отличиями заявляемого способа по сравнению с прототипом являются следующие:
1. Для каждой зоны по высоте рельса (головки, шейки или подошвы) выделяют конструктивный элемент, сигналы от которого используют в качестве опорного отражателя для советующей зоны. Высота рельсов на российских ж.д., в зависимости от типа, составляет от 152 мм (тип Р50) до 192 мм (Р75), что для УЗ контроля представляет определенную проблему, вызванную рассеянием и затуханием УЗ колебаний с увеличением глубины залегания озвучиваемой зоны. Очевидно, что и пороги обнаружения сигналов от искомых дефектов в зонах, залегающих на различных глубинах относительно поверхности сканирования, должны отличаться. В прототипе вопросы градации чувствительности контроля в зависимости от озвучиваемой зоны рельса не рассматриваются, что снижает надежность и достоверность контроля.
2. В качестве параметра сигналов, как для формирования опорных уровней, так и порогов обнаружения сигналов от дефектов, используют интегральную характеристику, более полно описывающую отражающую способность искомых дефектов, чем отдельные параметры в виде амплитуды или условной протяженности отражателя.
3. Предварительно определяют соотношения между ИХС от опорных отражателей и от искомых дефектов. Это позволяет более корректно выбирать пороговый уровень выделения сигналов от разнообразных дефектов с учетом их специфики и конфигураций в определенных зонах контролируемого объекта (рельсов).
4. При контроле (особенно на высоких скоростях) участков рельсового пути со сверхнормативно пропущенным тоннажем, в зоне болтовых стыков рельсов из-за возможного износа головки и прогиба концов рельсов, сигналы от конструктивного отражателя в виде торцов рельсов могут иметь значительный разброс, что затрудняет их использование в качестве опорных отражателей. Поэтому в частном случае, в качестве опорного отражателя целесообразно выбрать один тип конструктивного отражателя, формирующий наиболее стабильные сигналы в процессе сплошного контроля рельсового пути. При этом предварительно определяют соотношения между ИХС от искомых дефектов в каждой зоне контроля и от выбранного опорного отражателя, и на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов для соответствующих каналов ДС. В прототипе такие предварительные операции по определению соотношений характеристик сигналов от выбранного опорного отражателя с ИХС искомых дефектов в разных сечениях рельса не предусмотрены, что снижает достоверность контроля.
Совокупность существенных признаков предлагаемого способа позволяет получить технический результат: повышение достоверности контроля и упрощение реализации способа УЗ контроля рельсов в широком диапазоне скоростей сканирования путем введения адаптивных порогов выделения сигналов от искомых дефектов. Заявляемым способом решается важная задача автоматического формирования адаптивных порогов обнаружения сигналов от дефектов в каждом УЗ канале многоканального ДС с учетом залегания искомых дефектов в разных сечениях рельса. При этом учитываются динамически меняющиеся условия контроля в широком диапазоне скоростей сканирования.
Заявляемый способ иллюстрируется следующими графическими материалами.
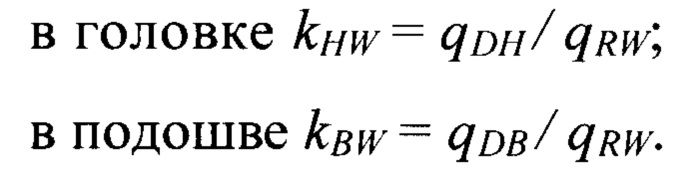
Фиг. 1. Схема озвучивания конструктивных элементов (болтовых отверстий и нижнего угла торца рельса) наклонными ЭАП, где:
1 - рельс с зонами контроля: головка (H); шейка (W); и подошва (В);
2 - болтовые отверстия в зоне болтового стыка;
Wr - отражающая поверхность отверстий;
3 - торец рельса в зоне болтового стыка;
Br - угловые отражатели, образованные торцом и подошвой рельса;
4 и 5 - электроакустические преобразователи, осуществляющие ввод УЗ колебаний в рельс под углом α1 и направленные по- и против движения искательной системы вдоль рельса;
6 - блок ЭАП ДС, обеспечивающий конструктивное расположение и механическую защиту ЭАП 4 и 5 при движении их по поверхности катания рельса.
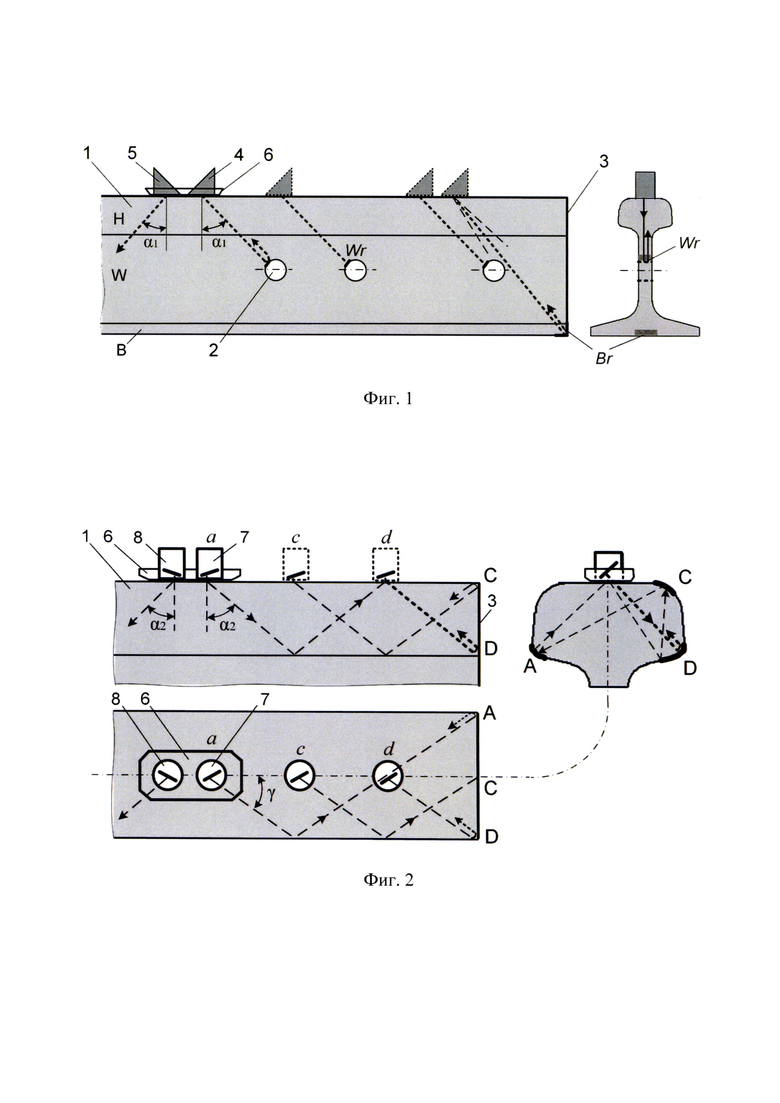
Фиг. 2. Схема формирования сигналов от торца головки (Н) рельса 1 наклонным ЭАП, развернутым в сторону боковой грани головки рельса, где:
7 и 8 - наклонные ЭАП, осуществляющие ввод УЗ колебаний в рельс под углами α2 и γ и направленные по- и против движения искательной системы вдоль рельса;
А, С, D - угловые отражатели, образованные торцом и закругленными гранями головки рельса.
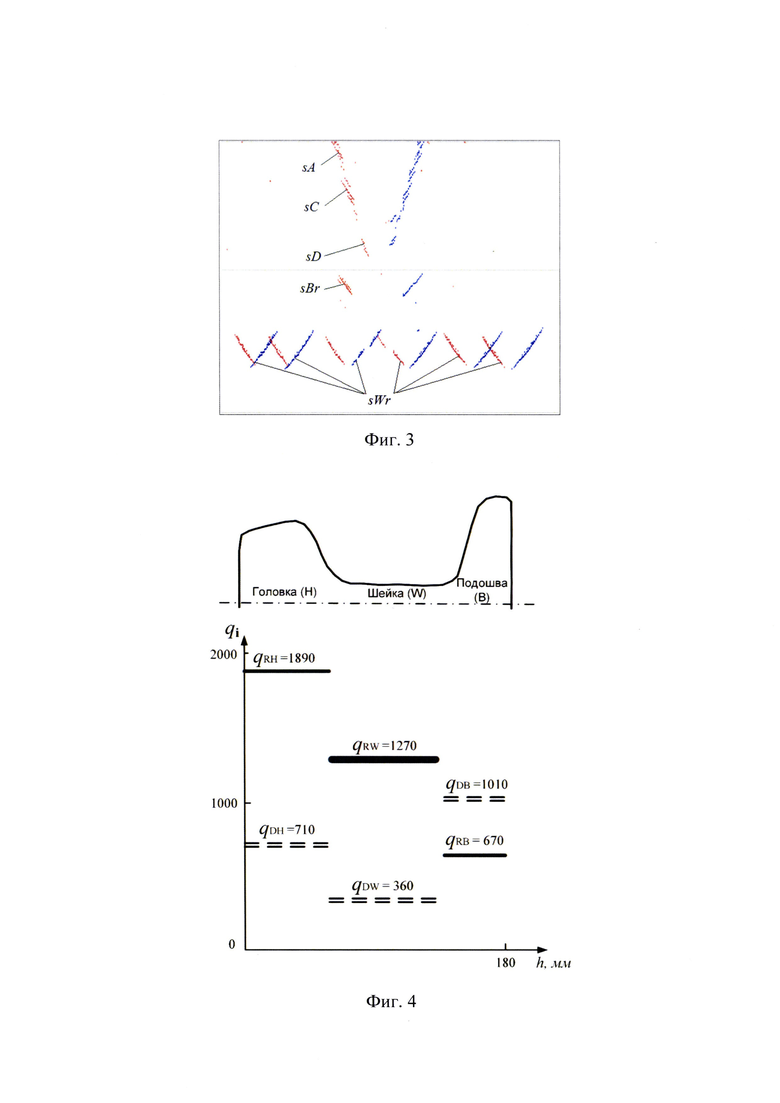
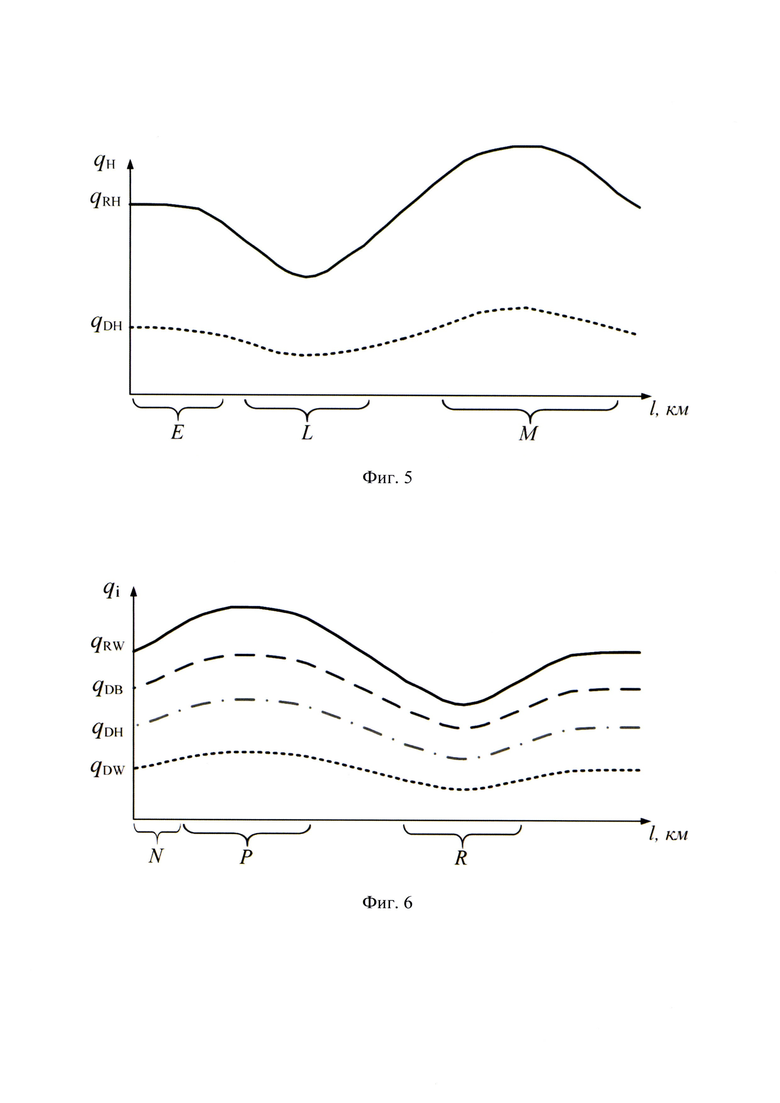
Фиг. 3. Фрагмент УЗ дефектограммы болтового стыка рельсов с сигналами от торцов головки и подошвы рельсов и от болтовых отверстий (сигналы с соответствующими индексами от отражателей на фиг.1 и 2).
Фиг. 4. Графическая демонстрация величин опорных уровней и порогов обнаружения дефектов для отдельных сечений ж.д. рельса.
Фиг. 5. Флуктуация опорного уровня и адаптивного порога сигналов зоны головки рельса в процессе сканирования ж.д. рельсов.
Фиг. 6. Флуктуация выбранного опорного уровня и формирование адаптивных порогов выделения сигналов для разных зон ж.д рельса.
Рассмотрим реализацию заявляемого способа на примере высокоскоростного УЗ контроля уложенных в путь ж.д. рельсов дефектоскопическими средствами, позволяющими контролировать рельсовые пути протяженностью до 250 - 300 км за один проезд со скоростями до 100 км/ч. Указанные ДС являются многоканальными комплексами и ориентированы на обнаружение разнообразных дефектов в головке, в шейке и в подошве рельсов. Для каждой зоны по высоте рельса целесообразно выбрать конструктивные элементы, параметры сигналов от которых можно принять за опорный уровень при формировании порогов обнаружения сигналов от дефектов в рельсах.
Болтовые стыки являются самыми распространенными конструктивными элементами рельсов на сети железных дорог ОАО «РЖД». Несмотря на широкое внедрение бесстыкового пути, они имеются в достаточном количестве (более 9,5 млн. стыков) и регулярно фиксируются на дефектограммах ДС. Даже на бесстыковых участках пути, в среднем через каждые 800 м (длина сварной плети), имеются 3-6 болтовых стыков в разрядных звеньях. Усредненные параметры сигналов от конструктивных элементов в зонах болтовых стыков, в соответствии с заявляемым способом, используются для формирования опорных уровней, и в конечном счете, для установления адаптивных порогов обнаружения сигналов от дефектов. Например, при скорости движения ДС равной 90 км/ч и при длине рельсовых (сварных) плетей 800 м, сигналы от болтовых стыков регистрируются через каждые 32 секунды и могут быть использованы для формирования опорных уровней.
В качестве примера на фиг.1 и 2 показаны: ЭАП 4 и 5 в блоке 6 для контроля зон шейки (W) и подошвы (В) рельса 1; ЭАП 7-8 - для контроля зоны головки (H) рельса 1. В процессе движения ДС (на фиг. не показан) с опущенными на рельсы ЭАП 4, 5, 7 и 8, объединенными в блоки ЭАП 6 и в целом в конструкцию искательной системы (на фиг. не показана) периодически излучают УЗ колебания, принимают и регистрируют отраженные от возможных дефектов и регулярных однотипных конструктивных элементов рельсового пути сигналы, оценивают их параметры. В общем случае при реализации способа возможно использование ЭАП как на основе пьезоэлектрических преобразователей (ПЭП), так и на основе электромагнитно-акустического (ЭМА) возбуждения УЗ колебаний.
Регулярными конструктивными элементами рельсового пути, которые возможно и целесообразно использовать в качестве опорных сигналов при реализации эхо метода УЗ контроля являются:
- отверстия в болтовых стыках рельсов диаметром 36 мм, залегающие на глубине 100 мм от поверхности катания рельса;
- угловые отражатели торцов рельсов в зоне болтовых стыков (образованные торцом и поверхностями головки и подошвы).
Фиг.1 демонстрирует получение с помощью ЭАП 4 эхо-сигналов от стенок болтовых отверстий Wr (для формирования опорного уровня контроля шейки рельсов) и эхо-сигналов от углового отражателя Br, образованного торцом 3 и поверхностью подошвы рельса В (для формирования опорного уровня контроля подошвы рельса). Для обнаружения разноориентированных дефектов в шейке и подошве (W и В) осуществляют ввод УЗ колебаний в рельс под углом α1 двумя ЭАП, направленными по- и против движения ДС вдоль рельса 1 (на фиг.1 ЭАП 4 и 5).
По принятым от отражателей Wr эхо-сигналам (фиг.1), по аналогии с [9 и 13], формируют интегральную характеристику сигналов от болтовых отверстий и определяют ее усредненное значение для нескольких (3-6 шт. ) болтовых стыков в зоне уравнительного пролета рельсового пути (на каждом стыке регистрируются полноценные группы (пачки) сигналов от 4-5 отверстий, усреднение ИХС производится по 12-30 болтовым отверстиям). Интегральная характеристика формируется с учетом амплитуд всех эхо-импульсов от отражателя и условной протяженности получаемой пачки сигналов. Аналогично интегральная характеристика формируется и усредняется для уголковых отражателей Br в подошве рельсов.
Выбор опорного отражателя для оценки сигналов от возможных дефектов в головке (зона Н) рельсов представляет определенную сложность, т.к. для этих целей традиционно используют достаточно сложные схемы прозвучивания, известные под названиями «Змейка», «Зеркальная», «РОМБ» и «РОМБ+» [5]. Основой этих схем является использование УЗ лучей, вводимых в рельс с поверхности катания под определенным углом к поверхности катания (угол ввода луча α2) и к продольной оси рельса (угол разворота γ), для озвучивания дефектов прямыми (m=0) лучами и УЗ лучами, многократно (m=1÷2) переотраженными от разных поверхностей головки рельса (закругленные грани головки А, С, D на фиг.2).
В качестве опорного конструктивного отражателя можно выбрать торцы головки рельса в зоне болтового стыка, в некоторой степени моделирующие развитую перечную трещину в головке рельса. В ходе перемещения искательной системы в сторону торца 3 рельса 1 наклонный ЭАП 7 последовательно озвучивает разные поверхности торца головки рельса: в положении а - двукратно (m=2) отраженным УЗ лучом - нижняя грань головки рельса со стороны нерабочей грани (угол А на поперечном сечении головки рельса); в положении с однократно (m=1) отраженным лучом - угол С; в положении d - нижний угол D торца рельса (фиг.2). Сигналы при озвучивании торца головки рельса в основном формируются за счет отражений от уголковых отражателей А, С, D, образованных разными закруглениями головки и торцом 3 рельса.
Теоретически в процессе сканирования ЭАП 7 от каждого уголкового отражателя (А, С и D) на дефектограмме формируются отдельные группы (пачки) сигналов sA, sC и sD (фиг.3). Как показано в [15] путем математического моделирования, при контроле рельсов с боковым износом головки рельса (допустимый износ до 20 мм) и при нарушении центровки ЭАП относительно продольной оси рельса, происходят изменения расчетных траекторий УЗ лучей, что приводит к объединению отдельных пачек сигналов в одну большую группу сигналов от торца 3 рельса 1. В связи с неоднозначностью выделения групп сигналов от отдельных отражателей (А, С и D) торца, целесообразно в качестве опорного значения принять обобщенную характеристику всех сигналов, получаемых от торца при приближении (удалении) наклонного ЭАП в зоне стыка (фиг.2 и фиг.3).
В общем случае, в качестве опорного отражателя при принятой схеме прозвучивания можно принять любой из рассмотренных уголковых отражателей А, С или D.
Аналогично формируются эхо-сигналы при озвучивании болтовых отверстий и торцов рельсов «отъезжающими» (фиг.1 и 2) ЭАП 5 и 8 (излучающими УЗ колебания в сторону, ориентированную против направления движения искательной системы), в том числе, и на другом («принимающем») конце рельсового стыка.
По действующей технологии высокоскоростного контроля рельсов как в России [16, 17], так и на зарубежных ж.д. [18], ДС периодически должны проходить тестирование (сертификацию) на испытательном участке пути с моделями разнообразных дефектов по всему сечению рельса. ДС получают разрешение на контроль эксплуатируемых рельсовых путей только после обнаружения всех указанных моделей с паспортизированными параметрами.
В соответствии с заявляемым способом на испытательном участке пути в процессе тестовых проездов определяют соотношения параметров сигналов от регулярных конструктивных элементов и от моделей дефектов в каждой зоне по высоте рельса. В последствии, при проведении рабочих проездов ДС по эксплуатируемым рельсовым путям, эти соотношения используют для формирования адаптивных пороговых уровней обнаружения сигналов от дефектов относительно текущих опорных уровней.
На фиг.4 показаны средние значения ИХС от опорных отражателей qR для отдельных зон по высоте рельса и ИХС от моделей дефектов qD, полученные на испытательном участке пути. По экспериментально полученным величинам определяются соотношения k между усредненными значениями ИХС от моделей дефектов qD и опорных сигналов каждой зоне по высоте рельса:
Например, среднее значение ИХС от торцов головки рельса, полученное в процессе измерений параметров сигналов на сертифицированном испытательном участке пути (десять рельсовых звеньев длиной по 12,5 м), составило qRH=1890 единиц, а средние значения ИХС от моделей дефектов в головке (12 моделей дефектов головки рельса) - qDH=708 единиц. При этом соотношение этих величин

показывает, что значения ИХС от дефектов в головке рельсов в среднем меньше в 2,63 раза, чем ИХС от торцов головки рельса, принятых в качестве опорного отражателя. Рассмотренные выше цифровые значения опорных уровней и соответствующих коэффициентов приведены в качестве примера и в общем случае могут иметь иные значения.
На рельсовом пути значительной протяженности в реальных условиях контроля, естественно, ИХС от конструктивных элементов (опорных отражателей) будут флуктуировать, и будут уменьшаться с увеличением скорости сканирования [1] под воздействием негативных факторов. Негативные факторы идентично действуют как на сигналы от опорных отражателей, так и на сигналы от искомых дефектов. С целью компенсации воздействий этих факторов, синхронно с изменением опорных уровней меняются и соответствующие пороговые уровни выделения сигналов от дефектов для каждого канала соответственно, формируя адаптивные пороги, зависящие от текущих условий сканирования контролируемых рельсов (фиг.5 и 6).
На фиг.5 в качестве примера показано формирование опорного и порогового уровней одного УЗ канала (при контроле головки рельса). На начальном участке контролируемого пути (участок Е на фиг.5) ИХС qRH от опорного отражателя (торца головки рельса) относительно постоянен. На участке L уровень qRH снижается (например, из-за загрязненности или изношенности поверхности рельсов, неудовлетворительного содержания болтовых стыков на участке или при увеличении скорости сканирования). На прямом участке М с хорошим содержанием пути уровень qRH увеличивается до максимального значения и в последствии (при повторном действии негативных факторов), наблюдается тенденция к его снижению. С изменением опорного уровня qRH, вызванного изменениями условий контроля, пропорционально меняется и пороговый уровень обнаружения сигналов от искомых дефектов.
Пороговый уровень qDH вычисляется с учетом предварительно полученного (на испытательном участке пути) коэффициента kH.
где qRH - текущее значение ИХС от конструктивных элементов контролируемой зоны (торцов головки рельсов).
Аналогичные зависимости (на фиг. не показаны) в процессе сканирования формируются и для остальных сечений (W и В) рельса.
В каждом УЗ канале усреднение ИХС для формирования линии адаптивных опорных уровней и порогов обнаружения целесообразно проводить в процессе набора серии пачек эхо-сигналов от заданного количества конструктивных элементов (например, на стыковых путях, при озвучивании не менее 10 болтовых стыков, следующих через каждые 25 м, на бесстыковых путях - от 3-6 болтовых стыков в уравнительных звеньях, следующих через каждые 800 м). Таким образом, коррекция порогов обнаружения дефектов будет происходить через каждые 250-800 м пути, адаптируясь к текущим условиям контроля рельсов.
Реализация предложенного способа позволяет оперативно учитывать не только особенности состояния контролируемых рельсов, но и качество настройки и работы УЗ каналов, своевременно парируя негативные изменения. Например, при частичном ухудшении приемо-излучающих свойств ЭАП (к примеру, частичное отслоение пьезопластины от призмы преобразователя) конкретного канала, соответственно снижаются значения величин ИХС от опорных отражателей, а значит и пороговые уровни выделения сигналов от дефектов. При этом, несмотря на ухудшение параметров контроля, сохраняется требуемый уровень надежности и достоверности контроля.
Для практической реализации способа важно, что формирование ИХС от опорных отражателей и пороговых уровней выделения сигналов от искомых дефектов производится не путем управления параметрами дефектоскопических каналов (как в аналогах и в прототипе), что особенно проблематично в многоканальных системах дефектоскопии и требует значительных аппаратных вмешательств в действующее дефектоскопическое оборудование, а путем обработки зарегистрированных сигналов. Причем, реализация способа не требует оперативного получения информации о текущей скорости сканирования, обычно измеряемой с определенной погрешностью. Достаточно лишь доработать программное обеспечение, позволяющее в соответствии с изложенной выше последовательностью обрабатывать эхо-сигналы, получаемые в процессе сканирования рельсов.
Путем цифровой обработки принятых от серии однотипных конструктивных элементов эхо-сигналов формируются усредненные ИХС для каждой зоны рельса, и, с учетом ранее полученных коэффициентов ki по выражениям (1), определяют пороги обнаружения сигналов от искомых дефектов. Программное решение задачи формирования адаптивных порогов без изменения конструкции и внутренней электроники дефектоскопической аппаратуры существенно упрощает реализацию способа как в уже действующих многоканальных комплексах, так и при разработке новых средств дефектоскопии. Указанная цифровая обработка эхо-сигналов от отражателей в рельсах выполняется способами, очевидными для специалистов.
Как показало апробирование предлагаемого способа в реальных условиях, выбранные выше конструктивные элементы в каждой зоне контроля надежно фиксируются в определенном диапазоне скоростей сканирования при удовлетворительном состоянии поверхностей катания рельсов (на участках пути с преимущественно пассажирским движением).
Однако на участках с грузовым движением, со значительным износом поверхности катания рельсов наблюдается значительный разброс уровней ИХС от конструктивных элементов, особенно вблизи зон стыкового зазора. При этом озвучивание опорных отражателей происходит при нахождении соответствующих ЭАП на минимальном расстоянии (от 40 до 180 мм) от торца рельса. Разброс показателей ИХС от торца головки и подошвы рельса (отражатели А, С, D и Br на фиг.2 и 1) может достигать до 50% от среднего значения при идентичных внешних условиях контроля (скорость, толщина протекторов ЭАП и др.). Видимо, это связано со значительными динамическими воздействиями на блоки 6 ЭАП при прохождении стыкового зазора в болтовых стыках. В то же время сигналы от болтовых отверстий в шейке, озвучиваются на значительном удалении от торца рельса (более 250 мм - см. фиг.1) и уровень их ИХС, при прочих равных условиях, достаточно стабилен.
Поэтому, в сложных (частных) случаях, предлагается выбирать один тип конструктивных отражателей, формирующих наиболее стабильные сигналы в процессе контроля рельсов, а ИХС от них принимать в качестве опорных уровней для всех каналов контроля. Соотношения между ИХС от искомых дефектов в каждом сечении рельса и выбранными опорными отражателями (в рассматриваемом случае - болтовыми отверстиями) предварительно определяют на испытательном участке пути. В процессе контроля рельсов на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов для соответствующих каналов ДС.
Как видно на фиг.4, опорный уровень qRW, сформированный на базе сигналов от болтовых отверстий (выделен более толстой линией), можно принять в качестве опорного уровня для головки (Н) и подошвы (В) рельса. По результатам предварительного проезда по испытательному участку пути необходимо установить соответствующие коэффициенты для искомых дефектов в каждой зоне относительно этого выбранного опорного уровня qRW:
Преимуществом выбора единого опорного уровня для всех сечений рельса является существенное упрощение реализации способа, т.к. в процессе рабочих проездов не требуется нагружать бортовой процессор ДС на выделение сигналов от торцов рельсов (в зоне головки и подошвы) и их обработку (определение текущих опорных ИХС qRH и qRB). Сигналы от болтовых отверстий в процессе сканирования встречаются в 4 - 5 раз чаще, чем сигналы от торцов, что позволяет сформировать статистически корректные средние уровни опорных ИХС. По сравнению с сигналами от других конструктивных элементов, сигналы от болтовых отверстий обладают достаточной стабильностью значений. В то же время, условия воздействия сторонних возмущений на блоки преобразователей 6 (фиг.1 и 2), конструктивно находящихся в общей искательной системе, как для озвучивания зоны шейки, так и зон головки и подошвы рельса идентичны, поэтому выбор единого опорного уровня qRW для работы в диапазоне значительных скоростей сканирования является оправданным.
На фиг.6 показаны пороговые уровни обнаружения сигналов от дефектов для зон головки (qDH), шейки (qDW) и подошвы (qDB) рельса, сформированные относительно усредненного уровня ИХС от болтовых отверстий qRW, принятого за опорный уровень. На начальном участке N контролируемого рельсового пути, например, из-за адаптации поверхности протекторов блоков резонаторов к поверхности катания рельсов, наблюдается постепенный рост порогов обнаружения сигналов от дефектов во всех зонах контроля синхронно с изменением усредненного опорного уровня qRW. После установки рабочего режима на прямом участке рельсового пути Р опорный уровень ИХС сигналов от болтовых отверстий qRW максимален (фиг.6). На участке пути R (из-за заснеженности или загрязнения поверхности катания рельсов, бокового износа головки рельсов и нарушения центровки преобразователей в кривых участках пути) пороговые уровни обнаружения сигналов от дефектов qDH, qDW и qDB синхронно с опорным уровнем qRW уменьшаются, что позволяет выявлять дефекты с меньшим значением ИХС, сохраняя заданную достоверность контроля.
Естественно, такое упрощение операций по формированию адаптивных пороговых уровней для всех зон контроля относительно одного опорного уровня несколько сужает функциональные возможности предлагаемого способа, т.к. в этом случае становится невозможным отслеживать корректную работу каждого УЗ канала в тех зонах контроля, где опорные сигналы, в данном частном случае, не формируются (в рассмотренном выше примере зоны Н и В). Но даже в этом случае, большинство негативных факторов (ухудшение акустического контакта, нарушение центровки ЭАП, повышение скорости контроля и т.п.), влияющих на качество работы всех каналов ДС, учитываются и парируются (компенсируются) путем формирования адаптивных порогов обнаружения сигналов.
Таким образом, предлагаемый способ многоканального УЗ контроля рельсов позволяет решить поставленную задачу и получить технический результат: повышение достоверности контроля рельсового пути в широком диапазоне скоростей сканирования путем введения адаптивных порогов выделения сигналов от искомых дефектов с одновременным упрощением реализации способа. При этом, выбор адаптивных порогов происходит с учетом особенностей выявления искомых дефектов в разных зонах по высоте рельса.
Важным преимуществом заявляемого способа является, также, и то, что формирование адаптивных порогов УЗ каналов ДС является не отдельным технологическим процессом, а производится автоматизированно и оперативно непосредственно в процессе дефектоскопии ж.д. рельсового пути.
Источники
1. Марков А.А., Максимова Е.А. Анализ параметров ультразвуковых сигналов при высокоскоростном контроле рельсов // Дефектоскопия. 2021. №3. С. 3-16.
2. Щербинский В.Г. Технология ультразвукового контроля сварных соединений. М: Изд-во «СВЕН», 2014. 494 с.
3. Муравьев В.В., Муравьева О.В., Байтеряков А.В. Структурно-чувствительные акустические параметры конструкционных сталей. Ижевск. Изд. ИжГТУ, 2020. 151 с.
4. Марков А.А. Особенности оценки условных размеров дефектов при значительных скоростях сканирования // Дефектоскопия. 1989. №3. С.8-16.
5. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. СПб.: Ультра Принт, 2014. 332 с.
6. SU 836577.
7. RU 2726277.
8. RU 62708.
9. RU 2753810.
10. RU 2550825.
11. RU 2662464.
12. RU 2603332.
13. RU 2699942.
14. RU 2774096.
15. Markov A.A., Keskinov M.V. Detection of flaws in the rail head by the mirror method under the condition of multiple reflection of ultrasonic oscillations //Russian Journal of Nondestructive Testing. 2008. T. 44. №7. C. 450 - 461.
16. RU 134133.
17. Инструкция по проверке работоспособности средств неразрушаю-щего контроля рельсов на испытательных участках пути ТИ 07.139-2020 (утв. Распоряжением ОАО РЖД №1771/р от 19.08.2020).
18. DIN EN 16729-1-2016 Railway applications - Infrastructure - Non-destructive testing on rails in track - Part 1: Requirements for ultrasonic inspection and evaluation principles.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов | 2021 |
|
RU2774096C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ зеркально-теневого ультразвукового контроля с адаптивным пороговым уровнем | 2022 |
|
RU2787948C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |
| Устройство для ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2813672C1 |
| Способ ультразвукового контроля зоны болтовых стыков рельсов | 2022 |
|
RU2791145C1 |
| СПОСОБ НАСТРОЙКИ ЧУВСТВИТЕЛЬНОСТИ РЕЛЬСОВОГО УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2015 |
|
RU2603332C1 |
| Способ прогнозирования развитий аномалий в головке рельсов | 2019 |
|
RU2699942C1 |
Использование: для ультразвукового контроля рельсов. Сущность изобретения заключается в том, что на рельсы устанавливают дефектоскопическое средство с электроакустическими преобразователями с разными направлениями излучения-приема, озвучивающими отдельные зоны по высоте рельса, преобразователи совместно перемещают вдоль рельса, периодически всеми каналами излучают в контролируемый рельс ультразвуковые зондирующие сигналы, принимают и регистрируют отраженные от возможных дефектов и регулярных однотипных конструктивных элементов рельсов сигналы, оценивают параметры сигналов, при этом для каждой зоны рельса выделяют конструктивный элемент, сигналы от которого используют в качестве опорного отражателя, определяют и усредняют интегральные характеристики сигналов от серии опорных отражателей, предварительно определяют соотношения между интегральными характеристиками сигналов от опорных отражателей и от искомых дефектов рельсов, на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов в соответствующих каналах дефектоскопического средства. В частном случае, в качестве опорных отражателей выбирают один тип конструктивного элемента рельсов, формирующий наиболее стабильные сигналы в процессе контроля рельсов. Технический результат: повышение достоверности контроля рельсов при одновременном упрощении ультразвукового контроля рельсов. 1 з.п. ф-лы, 6 ил.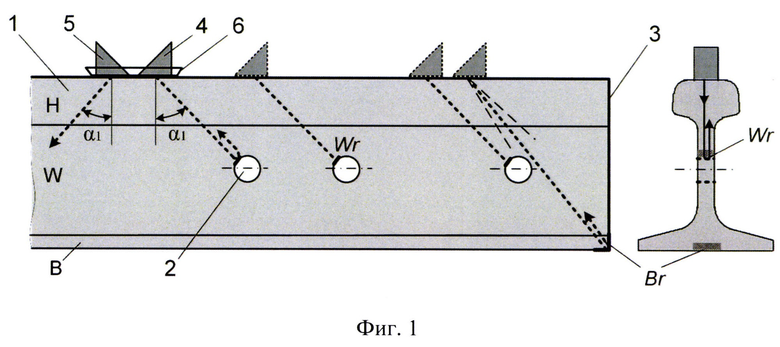
1. Способ многоканального ультразвукового контроля рельсов, заключающийся в том, что на рельсы устанавливают дефектоскопическое средство с электроакустическими преобразователями с разными направлениями излучения-приема, озвучивающими отдельные зоны по высоте рельса, преобразователи совместно перемещают вдоль рельса, периодически всеми каналами излучают в контролируемый рельс ультразвуковые зондирующие сигналы, принимают и регистрируют отраженные от возможных дефектов и регулярных однотипных конструктивных элементов рельсов сигналы, оценивают параметры сигналов, отличающийся тем, что для каждой зоны рельса выделяют конструктивный элемент, сигналы от которого используют в качестве опорного отражателя, определяют и усредняют интегральные характеристики сигналов от серии опорных отражателей, предварительно определяют соотношения между интегральными характеристиками сигналов от опорных отражателей и от искомых дефектов рельсов, на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов в соответствующих каналах дефектоскопического средства.
2. Способ многоканального ультразвукового контроля рельсов по п. 1, отличающийся тем, что в качестве опорных отражателей выбирают один тип конструктивного элемента рельсов, формирующий наиболее стабильные сигналы в процессе контроля рельсов, усредненные интегральные характеристики от данного отражателя принимают в качестве опорного уровня, предварительно определяют соотношения между интегральными характеристиками сигналов от искомых дефектов в каждой зоне рельсов и от выбранных опорных отражателей, и на основе этих соотношений устанавливают адаптивные пороги обнаружения сигналов от дефектов в соответствующих каналах дефектоскопического средства.
| Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов | 2021 |
|
RU2774096C1 |
| Устройство для масштабной корректировки | 1960 |
|
SU134133A1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2002 |
|
RU2227911C1 |
| Способ обнаружения дефектов в рельсах | 2018 |
|
RU2668941C1 |
| US 2012216618 A1, 30.08.2012 | |||
| JPH 09304364 A, 28.11.1997. | |||

