Изобретение относится к области устройств, осуществляющих измерения механических свойств материалов, и предназначено для определения площади контакта и наблюдения поверхности образца в процессе его деформации и может использоваться, например, в микротвердомерах и инструментальных нанотвердомерах.
При измерении твердости с помощью микротвердомеров и устройств, производящих измерения методом инструментального индентирования, твердость определяется как отношение нагрузки к площади остаточного отпечатка. В микротвердомерах измерение данной площади производится с использованием оптических микроскопов, а в инструментальных твердомерах – на основе анализа диаграммы нагрузка – глубина внедрения индентора в материал.
Инструментальные твердомеры, позволяющие проводить измерения механических свойств при малых нагрузках (нанотвердомеры), обладают возможностью оперативного измерения твердости и модуля упругости определенных локальных областей образца. При этом не учитываются эффекты, связанные с образованием навалов (pile-up) и с упругим прогибом контура поверхности (sink-in) вокруг области индентирования, что вносит погрешность в измерение площади отпечатка. Микротвердомеры позволяют определить твердость образца с учетом навалов поверхности, не измеряя при этом значение модуля упругости. Данные измерения проводятся на основе оптического или иного изображения остаточного отпечатка. Получение изображения поверхности в большинстве случаев требует контролируемое позиционирование образца относительно дополнительного модуля оптического или атомно-силового микроскопа, или иного устройства, позволяющего получать изображения поверхности.
Известен инструментальный твердомер, в котором высокоапертурный объектив помещают над емкостным преобразователем, позволяя позиционировать индентор в необходимую область измерения (US 20100107745, МПК G01B5/28, приоритет от 20.02.2007). Устройство включает механический зонд измерения инструмента и преобразователь, имеющий центральную ось, наконечник, прикрепленный к датчику, оптическую систему, в том числе, по крайней мере, одну линзу с центральной осью. Ось объектива повернута в сторону от оси указанного датчика. Преобразователь расположен между линзой и образцом, а беспрепятственный оптический путь обеспечивается, по крайней мере, одним отверстием в конструкции преобразователя. По крайней мере, одно отверстие расположено вблизи наконечника. Беспрепятственный оптический путь обеспечивается изготовлением преобразователя хотя бы частично из оптически прозрачного материала. Устройство дополнительно включает систему освещения, в которой освещение применяется к образцу вдоль оси, имеющей зеркальную симметрию с осью линзы. Ось преобразователя расположена в плоскости симметрии.
Однако при вертикальном наблюдении и использовании инденторов с большим углом раствора (например, инденторов в форме пирамиды Берковича и Виккерса), в условиях, когда индентор находится в непосредственной близости от поверхности, указанное устройство не позволяет наблюдать поверхность под острием, даже для случая числовой аппертуры 0.9.
Известно устройство (WO 2017138582, МПК G01N3/42, 12.02.16), для наблюдения поверхности образца с нагрузкой, приложенной к поверхности и с использованием прозрачного индентора. Индентор пропускает свет определенной длины волны. Устройство наблюдения включает средство для придания образцу нагрузки под давлением, средство измерения нагрузки для измерения нагрузки и средство для получения изображения поверхности образца, к которой прилагается нагрузка. Устройство также содержит средство захвата изображения через прозрачный индентор. Осуществляется наблюдение формы поверхности через жидкость в зазоре между прозрачным индентором и поверхностью образца. Показатели преломления прозрачных индентора и жидкости при измерении должны быть практически равны при температуре 25±5°С и при использовании света заданной длины волны. В результате, обеспечивается технология наблюдения поверхности образца во время нагрузки и разгрузки в процессе испытания.
В указанном устройстве свет пропускается непосредственно через прозрачный индентор. При определении твердости материала предполагается наличие жидкости на поверхности образца, обладающей коэффициентом преломления «n», равным коэффициенту преломления материала индентора. Однако данное устройство применимо только для стеклянного индентора (n≈1.5) или для сапфирового индентора (n≈1.75) и неприменимо для алмазного индентора (n≈2.4) ввиду отсутствия подходящей иммерсионной жидкости. Кроме того, из-за наличия для определения твердости материала жидкости, проведение процесса наблюдения становится неудобным.
Известны и другие устройства (US 4277174, МПК G01B11/00, G01N3/00, G01B11/02, G01N3/42, G01N3/06, приоритет от 09.01.1980, US 4275966 A, МПК G01N3/42, G01B11/00, G01B11/02, G01N3/00, G01N3/06, приоритет от 18.01.1979), которые не предполагают наличия жидкости на поверхности образца, позволяя измерять площадь контакта индентора с образцом по интенсивности отраженного света, но эти устройства не предполагают получение оптического изображения поверхности, что снижает информативность результатов исследования.
Известен твердомер, для определения твердости по Виккерсу, содержащий прозрачный алмазный индентор который освещается при помощи световодов (EP1478915B1, МПК G01N3/42; G01N3/00; G01N3/06, с приоритетом от 22 февраля 2002 г). Прозрачный алмазный индентор выполнен в форме пирамиды Виккерса, у которого в дополнение к ограненному индентирующему торцу на противоположном торце образованы фаски, через которые производят освещение индентора. Наблюдение поверхности ведется через плоскую часть противоположного (неиндентирующего) торца при помощи видеокамеры, направленной на поверхность индентора. Видеокамера подключена к блоку электроники, где происходит визуализация картинки, обработка данных, и хранение результатов измерения.
Наличие фасок на краях индентора, имеющих меньший угол (45о) по отношению к высоте пирамиды по сравнению с углом (68о) между гранями индентирующего торца и той же высотой приводит к тому, что свет проникает в индентор именно через данные фаски и позволяет осуществлять наблюдение только область контакта. Области образца не находящиеся в контакте выходят из поля зрения, что не позволяет осуществлять процесс индентирования в полном объеме. Наблюдение области контакта в известном устройстве осуществляется через плоский участок неиндентирующего торца, в отсутствии света, отраженного обратно от данного плоского участка в направлении наблюдения, что приводит к искажению оптического изображения, а, следовательно, и к неточности определения параметров исследования.
Проблемой изобретения является разработка индентора-объектива, обеспечивающего возможность получения оптического изображения исследуемой поверхности при предварительном позиционировании индентора во время выбора места индентирования, а также во время индентирования вне области контакта, с использованием стандартного оптического микроскопа и с освещением через объектив.
Техническим результатом изобретения является расширение функциональных возможностей индентора–объектива за счет визуализации процесса деформирования поверхности образца, обеспечения возможности исследований методом оптической спектроскопии области, находящейся в контакте с индентором непосредственно во время приложения и снятия нагрузки, а также упрощение процесса позиционирования индентора при выборе места измерения твердости гетерогенного образца с использованием стандартного оптического оборудования.
Поставленная проблема и указанный технический результат достигаются тем, что индентор-объектив выполнен из оптически прозрачного материала, индентирующий торец тела которого огранен в виде n-гранной пирамиды. Согласно изобретению неиндентирующий торец индентора также огранен в виде n-гранной пирамиды. Боковые грани пирамид ориентированы таким образом, что каждой грани пирамиды индентирующего торца соответствует параллельная ей грань неиндентирующего торца. Высоты пирамид лежат на одной прямой.
Для каждой i-ой грани неиндентирующего торца точка, расположенная на биссектрисе угла при вершине на расстоянии li от вершины, находится на поверхности данной грани, а li соответствует:

где,
Н – высота индентора-объектива между вершинами пирамид;
n1 – показатель преломления окружающей среды (воздуха);
n2 – показатель преломления материала индентора-объектива;
αi – угол между высотой пирамиды неиндентирующего торца и её i-ой гранью, где i – индекс, соответствующий номеру грани, принимающий целочисленные значения от 1 до n. Каждому значению i соответствует неравенство: n2 > n1 cos αi.
Торцы индентора могут быть выполнены в виде трехгранной пирамидой Берковича или в виде четырехгранной пирамиды Виккерса.
Неиндентирующий торец может быть также огранен в виде усеченной пирамиды.
Индентор–объектив преимущественно выполняют из алмаза.
Тело индентора может быть выполнено цилиндрической, призматической формы или в виде вертикально усеченного цилиндра.
На неиндентирующий торец желательно нанеси просветляющее покрытие.
Выполнение неиндентирующего торца в виде пирамиды, у которой боковые грани ориентированы таким образом, что для каждой грани на неиндентирующем торце соответствует параллельная ей грань на индентирующем торце, приводит к тому, что луч света, отраженный от поверхности образца и попавший на одну из граней индентирующего торца выходит через соответствующую параллельную ей грань неиндентирующего торца таким образом, что его направление остается параллельным исходному направлению до преломления луча в инденторе. Таким образом, «n» пар граней позволяют наблюдать «n» секторов, в каждом из которых наблюдается неискаженное оптическое изображение. Полное изображение поверхности получается линейной трансляцией данных секторов. Расположение высот пирамиды на одной прямой необходимо для подавления эффекта наложения нескольких изображений разных областей поверхности в рамках одного сектора.
Рассмотрение оптического хода лучей через индентор-объектив приводит к выводу, что точка поверхности, лежащая под i-ой гранью индентирующего торца вблизи индентирующего кончика, отображается на поверхности неиндентирующего торца на отдалении от его вершины. Смещение данное точки в плоскости наблюдения совпадает со смещением всего сектора, наблюдаемого через i-ю пару граней индентирующего и неиндентирующего торца. Таким образом, для наблюдения области непосредственно под индентором, необходимо чтобы поверхность неиндентирующего торца обладала достаточными размерами. Рассмотрение хода и преломления лучей в инденторе показывает, что отображение точки под индентором возможно при условии, что для каждой i-ой грани неиндентирующего торца точка, расположенная на биссектрисе угла при вершине на расстоянии li от вершины, находится на поверхности данной грани, а li соответствует:
где,
Н – высота индентора-объектива между вершинами пирамид;
n1 – показатель преломления окружающей среды (воздуха);
n2 – показатель преломления материала индентора-объектива;
αi – угол между высотой пирамиды неиндентирующего торца и её i-ой гранью;
i – индекс, соответствующий номеру грани, принимающий целочисленные значения от 1 до n, при этом, каждому значению i соответствует неравенство: n2 > n1 cos αi.
Наиболее распространенными формами многогранных пирамид, используемых в микро - и нанотвердомерах являются инденторы в форме пирамид Берковича (n=3) и Виккерса (n=4). Данные пирамиды изготавливают из алмаза и используют на открытом воздухе (n2=1, n1=2.4) Оригинальная и модифицированная пирамиды в форме Берковича имеют значения αi = 65.03 и αi = 65.27 для всех i=1, 2, 3, в таких случаях выражения для связи li и H приобретают вид li =0.272H и li =0.267H для всех i. При этом для связи dri и H имеют место соотношения ri =0.247H и ri =0.242H для всех i в случае оригинального и модифицированного Берковича соответственно. Для пирамиды Виккерса αi = 68 для всех i=1, 2, 3, 4 и для данных i имеют места уравнения li = 0.211H и ri = 0.195H.
В связи с тем, что наиболее информативная и необходимая для анализа область поверхности под кончиком индентирующего торца отображается на отдалении от кончика неиндентирующего торца, неиндентирующий торец может быть выполнен усеченным. Данная модификация используется для крепления индентора.
Выполнение индентора из алмаза, как самого твердого прозрачного материала, позволяет индентировать иные более мягкие материалы
В зависимости от способа изготовления и крепления индентора допускается различные формы боковой поверхности индентора: цилиндрическая, призматическая, усеченная цилиндрическая.
Для уменьшения количества света, отраженного от поверхности неиндентирующего торца на его поверхность наносят просветляющее покрытие.
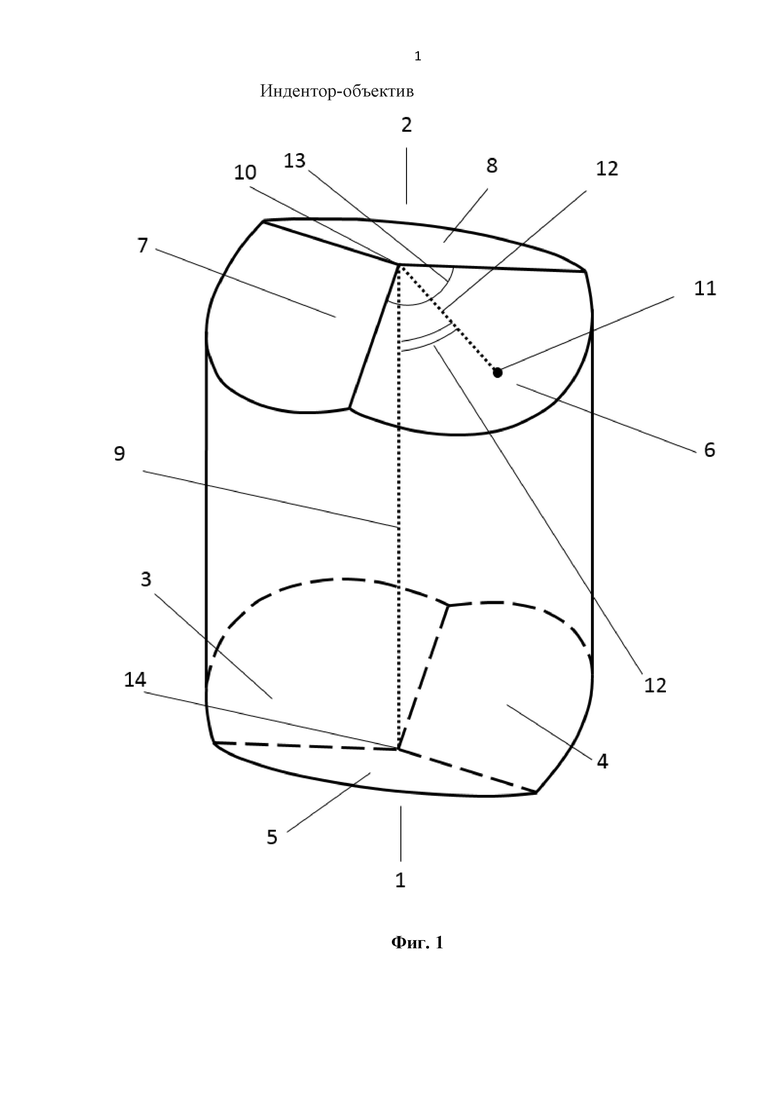
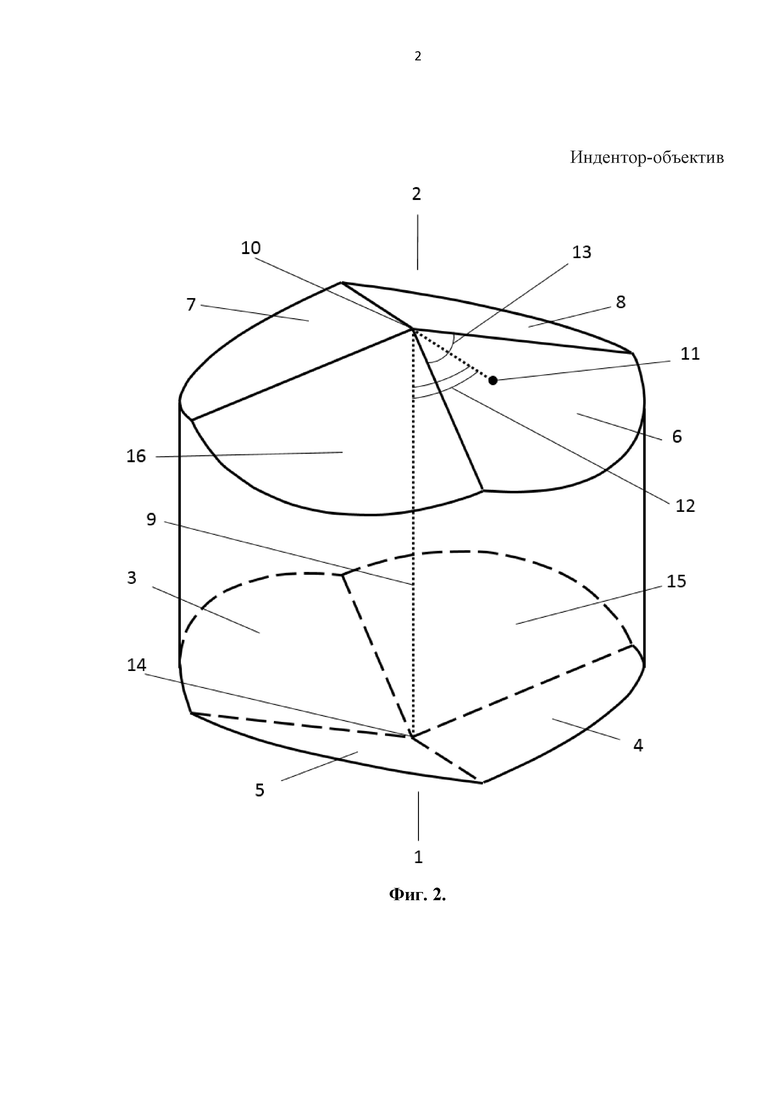
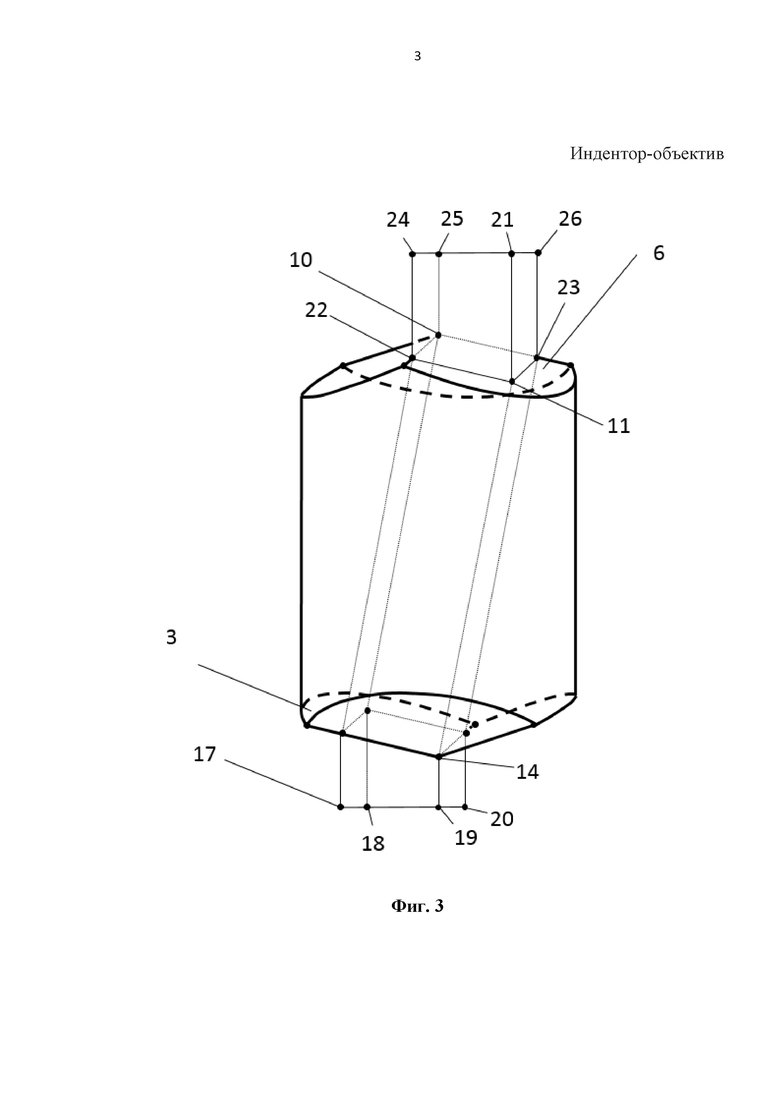
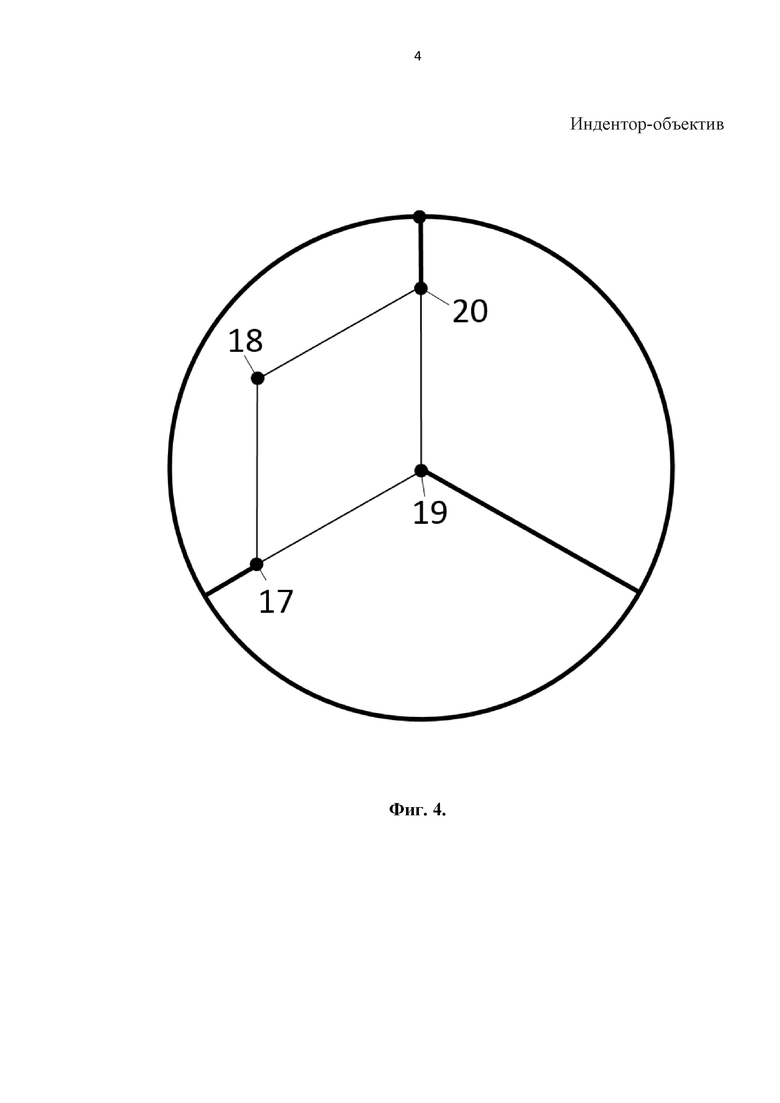
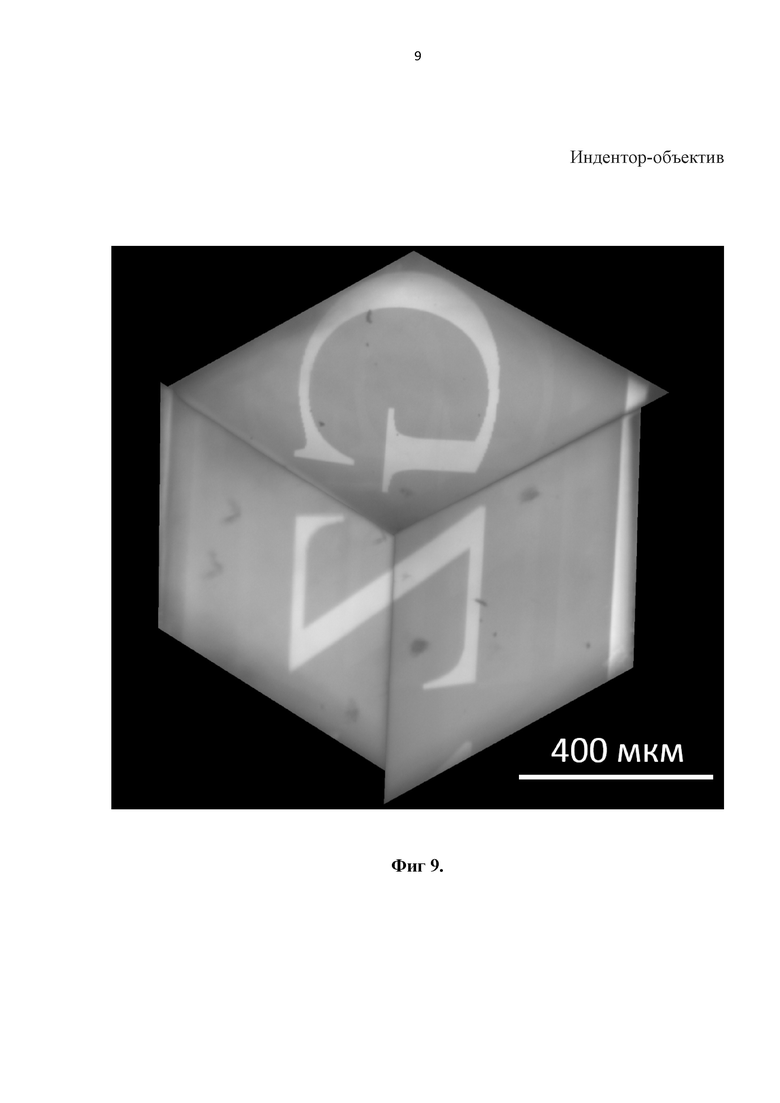
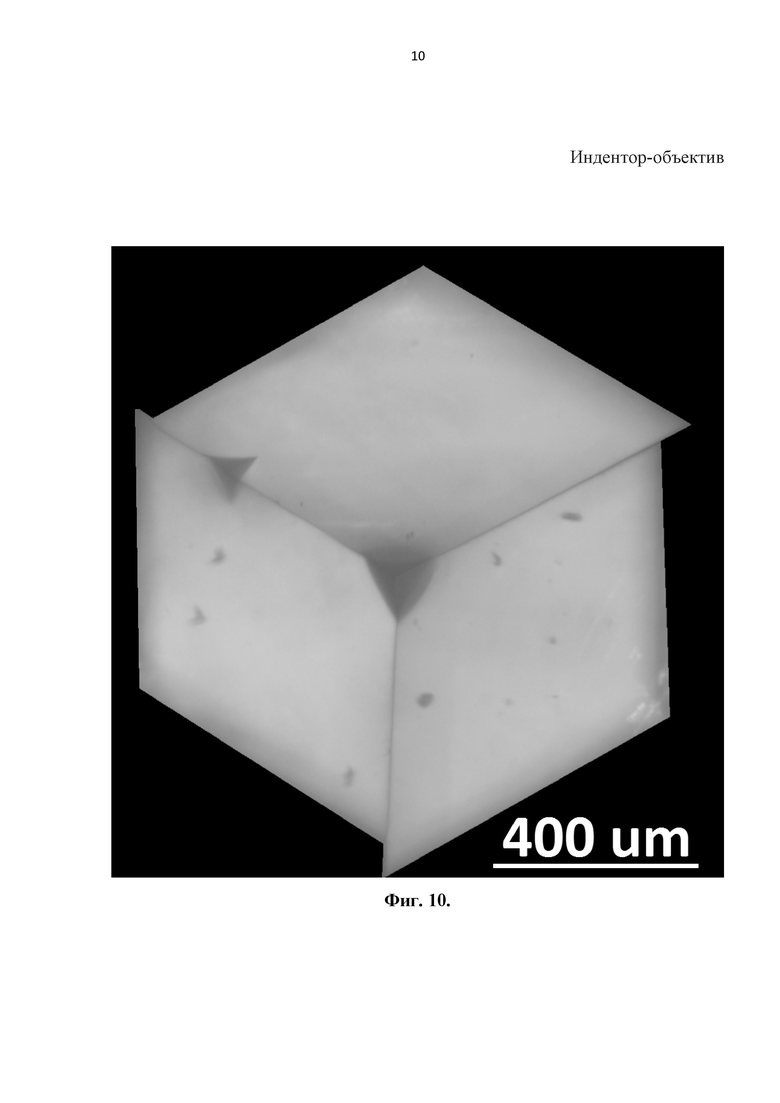
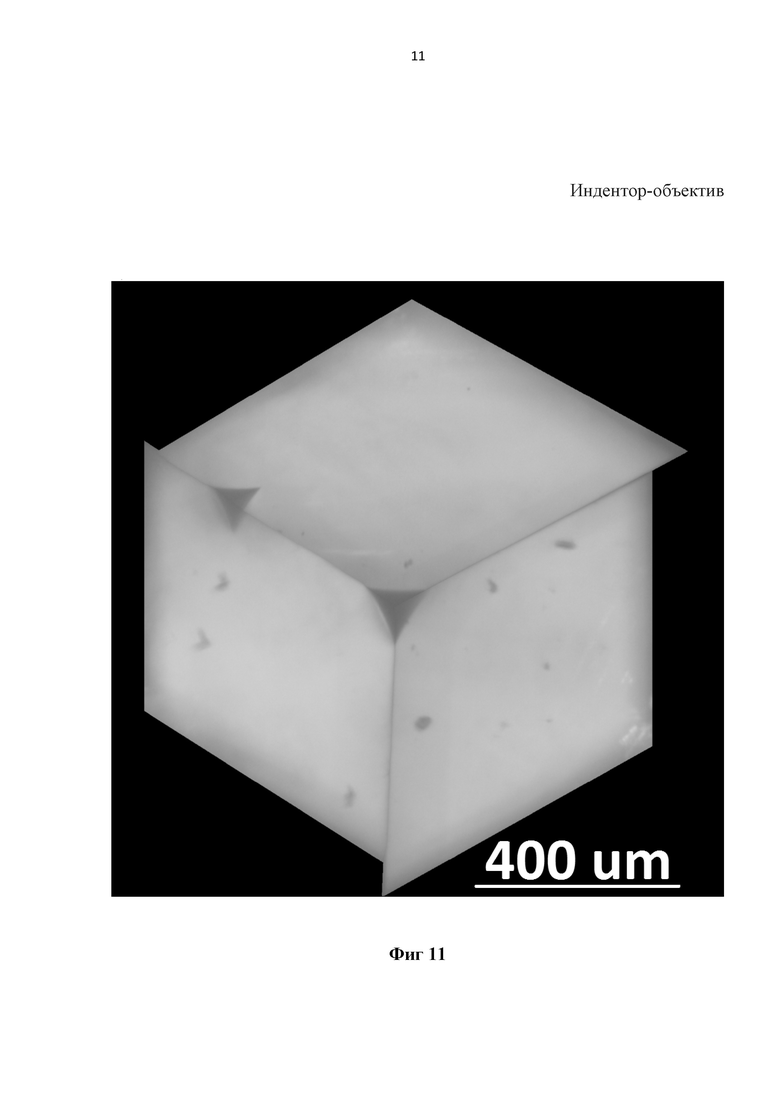
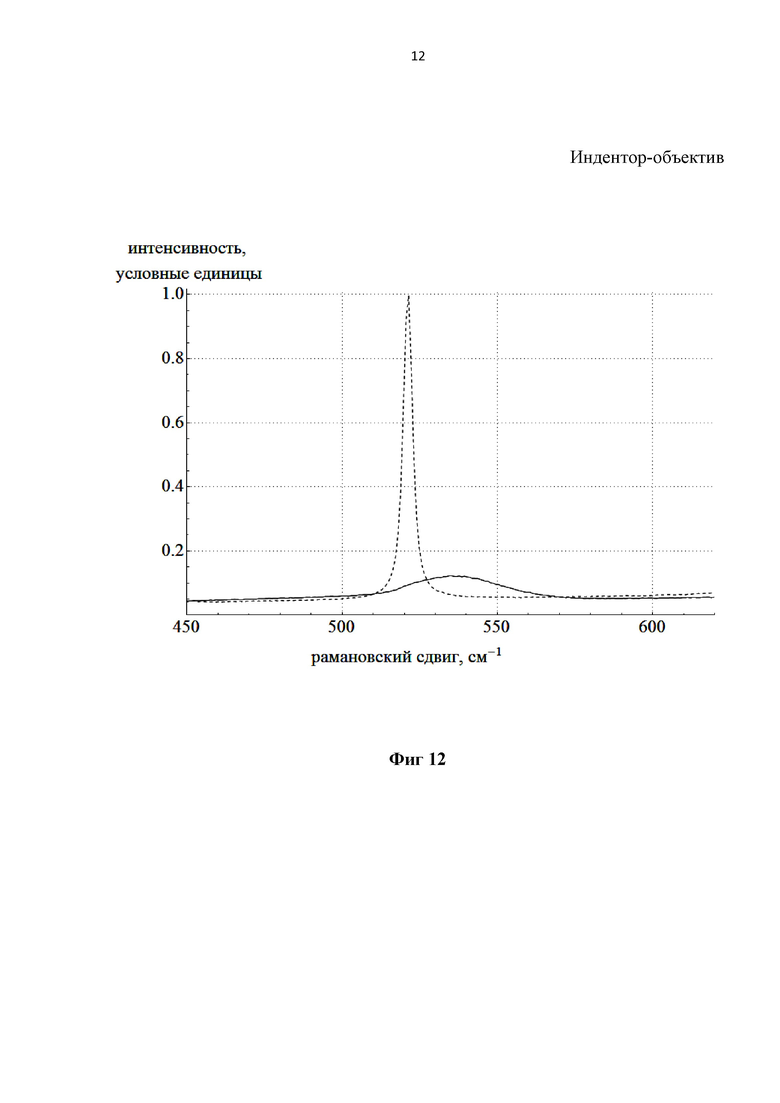
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен индентор-объектив для наконечника микротвердомера, у которого оба торца огранены в форме пирамиды Берковича; на фиг. 2 изображен индентор-объектив, у которого оба торца огранены в форме пирамиды Виккерса; на фиг. 3 - изображен ход лучей через пару параллельных граней в пирамиде Берковича; на фиг. 4 представлен вид со стороны индентирующего торца на индентор-объектив и проходящий через него луч; на фиг. 5. - вид со стороны индентирующего торца на индентор-объектив и проходящий через него луч; на фиг. 6 представлен индентор-объектив с усеченным неиндентирующим торцом; на фиг. 7 изображен индентор-объектив на штоке индентора; на фиг. 8 - изображение тестовой структуры TGZ2, наблюдаемое непосредственно через индентор-объектив, где стрелочками отмечены углы, соответсвующие области, находящейся под кончиком индентирующего торца; на фиг. 9 - изображение области структуры TGZ2, полученное путем линейной перестановки секторов, представленных на фиг. 8; на фиг. 10 - изображение поверхности поликорбаната, полученное непосредственно во время его индентирования, наблюдаемые непосредственно через индентор-объектив, сектора были переставлены до получения связного изображения; на фиг. 11 - изображение того же участка поверхности поликорбаната после снятия нагрузки; на фиг. 12 приведен фрагмент рамановских спектров (спектров комбинационного рассеяния), полученных через индентор-объектив для недеформированной поверхности кремния (сплошная линия) и поверхности кремния в области контакта при приложении нагрузки 30 Н (штрихованная линия).
Индентор–объектив для наконечника микротвердомера выполнен из оптически прозрачного материала, преимущественно из алмаза. Индентирующий торец 1 и неиндентирующий торец 2 огранены в виде n-гранной пирамиды, где на фиг. 1 представлены торцы 1 и 2 в форме пирамиды Берковича, а на фиг. 2 - в форме пирамиды Виккерса. Боковые грани 3, 4 и 5 индентирующего торца 1 ориентированы таким образом, что каждой боковой грани 3 индентирующего торца 1 соответствует параллельная ей грань 6 неиндентирующего торца 2, грани 4 соответствует грань 7, а грани 5 – грань 8. В случае пирамид Виккерса, представленных на рис. 2, грани 15 индентирующего торца соответствует грань 16 неиндентирующего торца. Обе высоты пирамид лежат на одной прямой 9. Для каждой грани 6, 7 и 8 неиндентирующего торца 2 точка, расположенная на биссектрисе угла при вершине 10 на расстоянии li от вершины, находится на поверхности данной грани. На рисунке точка 11, которая расположена на биссектрисе 12 угла 13 при вершине 10 полностью лежит на грани 6. При этом длина биссектрисы 12 li соответствует уравнению:
где,
Н – высота индентора-объектива между вершинами 10 и 14 пирамид на неиндентирующем торце 2 и индентирующего торца 1;
n1 – показатель преломления окружающей среды (воздуха);
n2 – показатель преломления материала индентора-объектива;
αi – угол 9 между высотой 10 пирамиды неиндентирующего торца 2 и её гранью 4;
i – индекс, соответствующий номеру грани 3, 4 и 5, а также 6, 7 и 8 принимающий целочисленные значения от 1 до n. Каждому значению i соответствует неравенство: n2 > n1 cos αi.
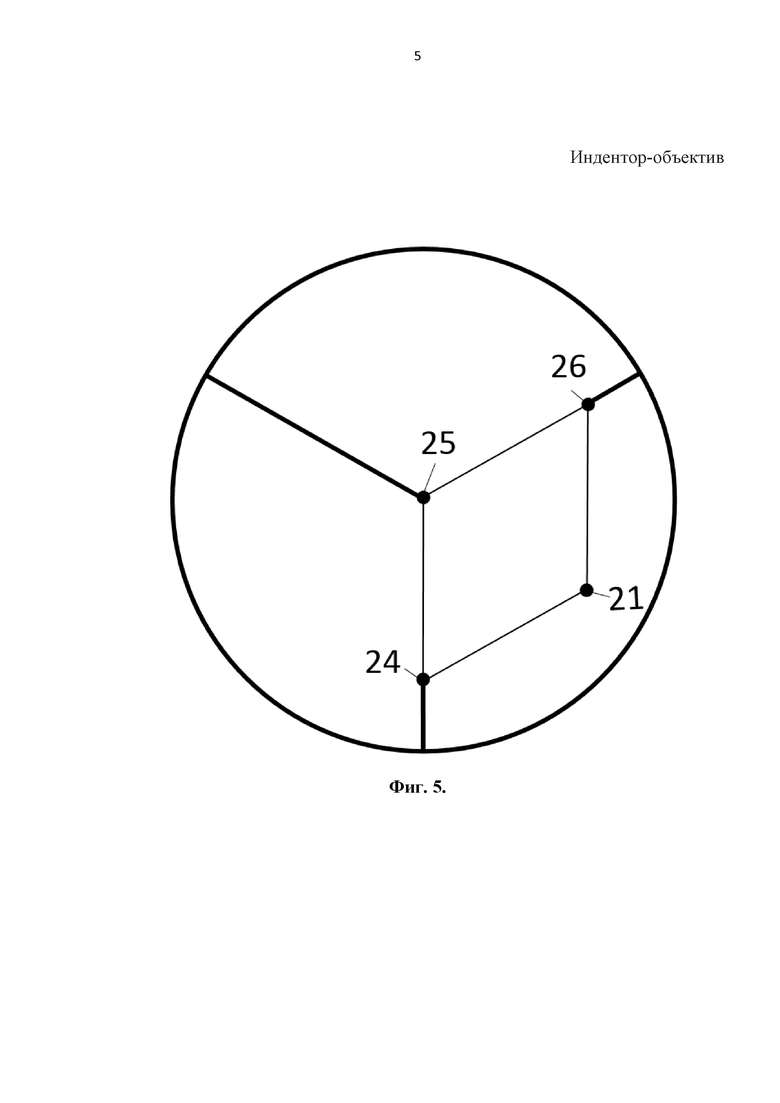
Неиндентирующий торец 2 может быть огранен в виде усеченной пирамиды (фиг. 5 и 6).
Тело индентора выполнено цилиндрической формы, но также может быть выполнено, призматической формы или в виде вертикально усеченного цилиндра (на фиг. не показано).
Работа устройства иллюстрируется на фиг. 3. Лучи, проходящие через область поверхности между точками 17, 18, 20, 19, попадают на грань 3 и выходят через параллельную ей грань 6. Как видно по границе пучка света 19, 14, 11, 21, лучи в окрестности точки 19, находящей под кончиком индентора 14 проходят внутри области 22, 10, 23, 11 в окрестности точки 11. Таким образом, для отображения области под кончиком индентирующего торца 1 необходимо, чтобы грань 6 обладала достаточным размером: содержала точку 11. На фиг. 4 и фиг.5 представлены дополнительные к фиг.3 виды со стороны индентирующего торца 1 и неиндентирующего торца 2. Область пространства между точками 24, 25, 26, 21 является областью изображения поверхности между точками 17, 18, 20, 19. Таким образом, лучи, проходящие через пару граней 3 и 6 создают одну треть полного наблюдаемого изображения поверхности. Область под кончиком индентора индентирующего торца 1 отображается в точку 21. Оставшиеся два сектора изображения, формируются лучами через пары граней 4, 7 и 5, 8 аналогично.
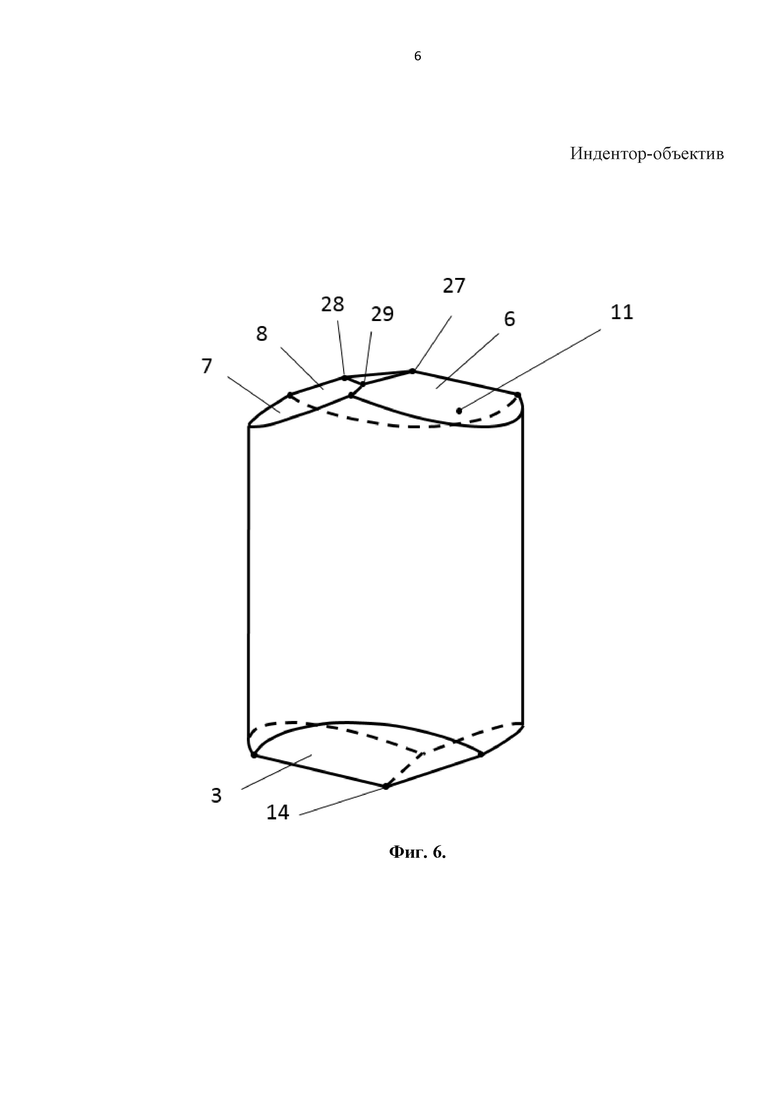
На фиг. 6 представлен индентор с неиндентирующим торцом 2 в форме усеченной пирамиды. Образованные новые вершины обозначены цифрами 27, 28, 29. Как видно из представленного изображения, грань 6 по-прежнему содержит точку 11, а значит, может быть использована для наблюдения области поверхности под кончиком индентирующего торца 1. Для наблюдения полного изображения грани 7 и 8 усеченной пирамиды содержат аналогичные точки.
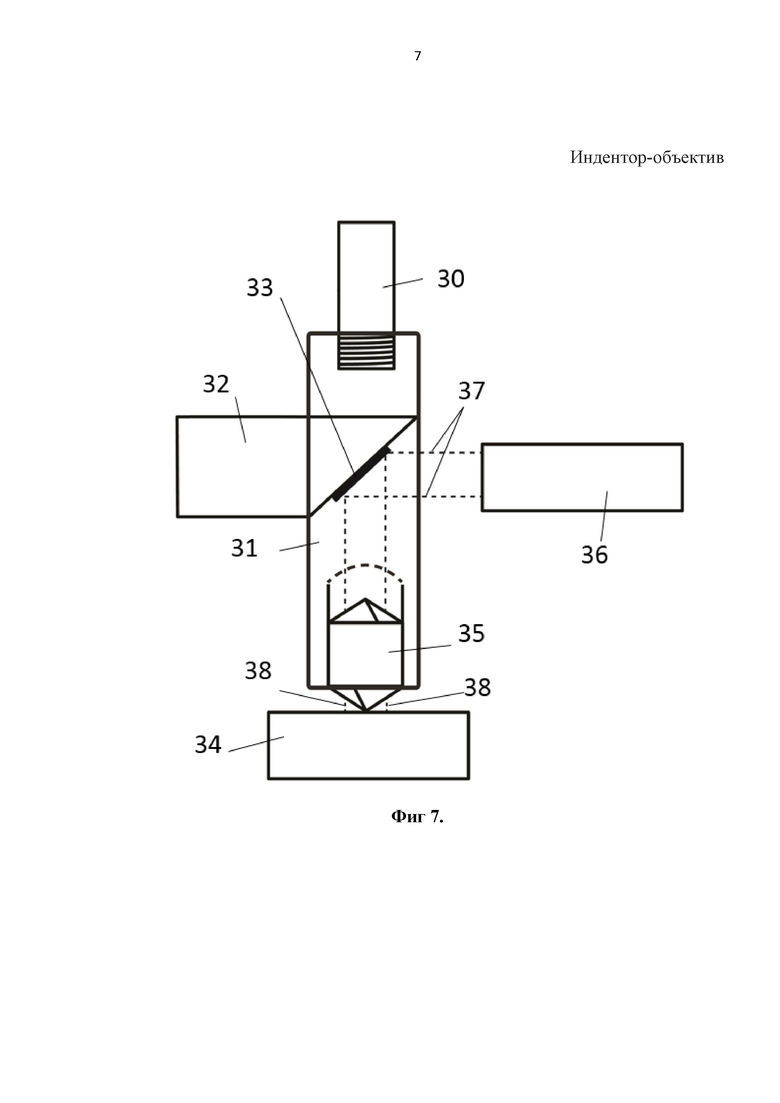
На фиг.7 изображена установка, которая содержит шток 30, корпус 31 крепления индентора-объектива, блок 32 для крепления зеркала 33, отражающего лучи от образца 34, проходящие через индентор-объектив 35 в направлении оптического микроскопа 36. Пунктирными линиями 37 и 38 изображены граница хода лучей.
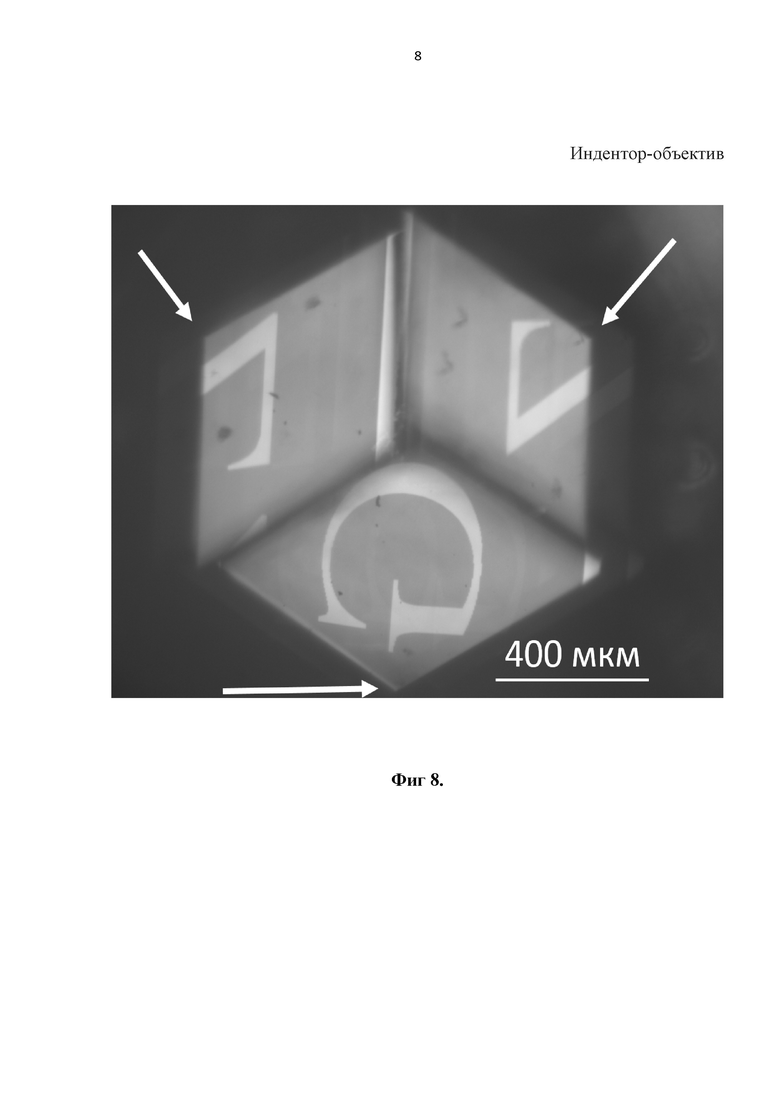
На фиг. 8 представлено изображение тестовой структуры TGZ, наблюдаемое непосредственно через индентор-объектив, области образца находящиеся под кончиком индентирующего торца 1 отображаются на краях данного отображения – в местах отмеченных стрелками. Полное связное отображение получается при помощи линейной трансляции (перестановки) трёх секторов, что осуществляется, например, при помощи персонального компьютера. Данная операция приводит к изображению, представленному на фиг.9. Фигуры 8 и 9 представляют изображение поверхности, над которой находится индентор, что обеспечивает возможность поиска места для индентирования гетерогенной структуры в реальном времени.
На фиг. 10 и 11 представлено изображение поверхности поликорбаната во время приложения максимальной нагрузки 1.5 Н и после ее снятия, видно, что деформированная область во время приложения нагрузки обладает не только большей площадью, но и в отличие от остаточного отпечатка обладает выпуклой формой, что позволяет сделать вывод, о том, что в контакте с образцом находилась преимущественно область вдоль рёбер индентора.
На фиг. 12 приведен рамановский спектр (спектр комбинционного рассеяния), полученного непосредственного через индентор-объектив не контактирующий с поверхностью (пунктирная линия), а также в условиях приложения нагрузки 30 Н (сплошная линия). Видно, что интенсивность основной линии падает при приложении нагрузки, а также смещается в область более высоких частот. Сдвиг рамановской линии кремния позволяет вычислять давление в кремнии (см. например Poborchii V., Tada T., Kanayama T. Observation of the forbidden doublet optical phonon in Raman spectra of strained Si for stress analysis // Appl. Phys. Lett. 2010. Vol. 97, № 4. P. 65–68). Кроме того возникновение дополнительных линий в спектре позволяет судить об образовании дополнительных фаз в образце, в частности тех, которые существуют только под давлением и могут наблюдаться только при приложении нагрузки, что может быть достигнуто при помощи индентора-объектива.
Предложенный индентор–объектив позволяет получать оптическое изображение исследуемой поверхности во время выбора места индентирования, а также во время индентирования вне области контакта, с использованием стандартного оптического микроскопа, облегчая и ускоряя процесс исследования, с возможностью визуализации непосредственно в процессе определения свойств образца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения области контакта индентора с поверхностью образца | 2021 |
|
RU2771063C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОКРЫТИЯ НА ИЗДЕЛИИ | 2018 |
|
RU2698474C1 |
| Способ измерения параметров медленного роста трещин в хрупких материалах | 1991 |
|
SU1833802A1 |
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| СПОСОБ ОЦЕНКИ МИКРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ЛОКАЛЬНЫХ ОБЛАСТЕЙ МЕТАЛЛОВ | 2013 |
|
RU2554306C2 |
| Способ определения твердости металлических материалов | 2021 |
|
RU2769646C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ШЕРОХОВАТОСТИ, МИКРОМЕХАНИЧЕСКИХ И ТРИБОТЕХНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛА ПОВЕРХНОСТИ ИЗДЕЛИЙ | 2019 |
|
RU2731037C1 |
| Способ определения сопротивления деформации металлических материалов при индентировании четырехгранной пирамидой | 2019 |
|
RU2731034C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В ТВЕРДЫХ ПОКРЫТИЯХ НА ПОДАТЛИВЫХ ПОДЛОЖКАХ | 2022 |
|
RU2793300C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ПУАССОНА | 2008 |
|
RU2410667C2 |
Изобретение относится к области устройств, осуществляющих измерения механических свойств материалов, и предназначено для определения площади контакта и наблюдения поверхности образца в процессе его деформации. Индентор-объектив выполнен из оптически прозрачного материала, индентирующий торец тела которого огранен в виде n-гранной пирамиды. Согласно изобретению неиндентирующий торец индентора также огранен в виде n-гранной пирамиды. Боковые грани пирамид ориентированы таким образом, что каждой грани пирамиды индентирующего торца соответствует параллельная ей грань неиндентирующего торца. Высоты пирамид лежат на одной прямой. Технический результат: расширение функциональных возможностей индентора–объектива за счет визуализации процесса деформирования поверхности образца. 9 з.п. ф-лы, 12 ил.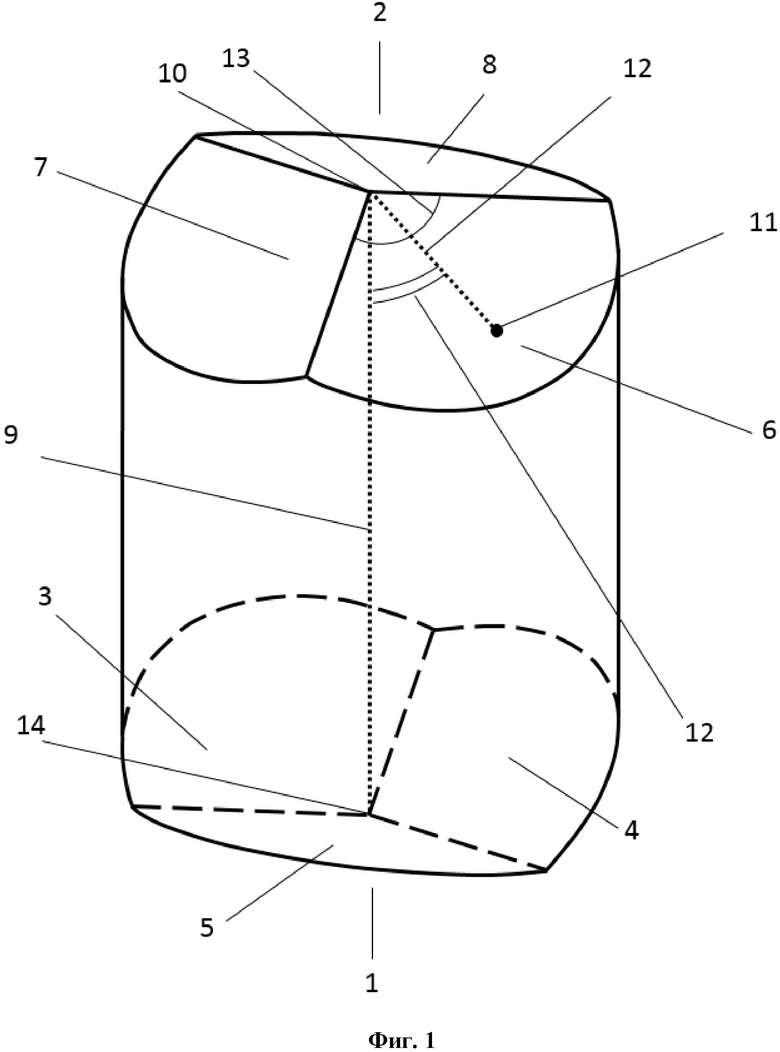
1. Индентор-объектив, выполненный из оптически прозрачного материала, индентирующий торец тела которого огранен в виде n-гранной пирамиды, отличающийся тем, что неиндентирующий торец индентора также огранен в виде n-гранной пирамиды, при этом боковые грани пирамид ориентированы таким образом, что каждой грани пирамиды индентирующего торца соответствует параллельная ей грань неиндентирующего торца, а высоты пирамид лежат на одной прямой.
2. Индентор-объектив по п. 1, отличающийся тем, что для каждой i-й грани неиндентирующего торца точка, расположенная на биссектрисе угла при вершине на расстоянии li от вершины, находится на поверхности данной грани, а li соответствует

где Н – высота индентора-объектива между вершинами пирамид;
n1 – показатель преломления окружающей среды (воздуха);
n2 – показатель преломления материала индентора-объектива;
αi – угол между высотой пирамиды неиндентирующего торца и её i-й гранью;
i – индекс, соответствующий номеру грани, принимающий целочисленные значения от 1 до n, при этом каждому значению i соответствует неравенство: n2 > n1 cos αi.
3. Индентор–объектив по п. 1, отличающийся тем, что торцы индентора выполнены в виде трехгранной пирамиды Берковича.
4. Индентор–объектив по п. 1, отличающийся тем, что торцы индентора выполнены в виде четырехгранной пирамиды Виккерса.
5. Индентор–объектив по пп. 1, 2, отличающийся тем, что неиндентирующий торец огранен в виде усеченной пирамиды.
6. Индентор–объектив по п. 1, отличающийся тем, что он выполнен из алмаза.
7. Индентор–объектив по п. 1, отличающийся тем, что тело индентора выполнено цилиндрической формы.
8. Индентор–объектив по п. 1, отличающийся тем, что тело индентора выполнено призматической формы.
9. Индентор–объектив по п. 1, отличающийся тем, что тело индентора выполнено в виде вертикально усеченного цилиндра.
10. Индентор–объектив по п. 1, отличающийся тем, что на неиндентирующий торец нанесено просветляющее покрытие.
| Индентер твердомера | 1971 |
|
SU463038A1 |
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ ПРЕВРАЩЕНИЙ НАДМОЛЕКУЛЯРНЫХ СТРУКТУР ПОЛИМЕРОВ | 0 |
|
SU248326A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ДЕФОРМАЦИИ НАДМОЛЕКУЛЯРНЫХ СТРУКТУР ПОЛИМЕРОВ | 0 |
|
SU239639A1 |
| EP 1478915 B1, 10.09.2014 | |||
| US 20100064783 A1, 18.03.2010. | |||

