Изобретение относится к области экспериментальной аэродинамики, в частности, к автоматическим системам управления положением модели в аэродинамических трубах.
Проведение аэродинамических испытаний моделей летательных аппаратов (ЛА) в аэродинамических трубах (АДТ) предполагает изменение положения модели в рабочей части (РЧ) АДТ относительно воздушного потока.
Известен способ управления положением модели в аэродинамической трубе, использующий три приводных устройства (Изобретение №2660225, МПК G01M 3/04, 2006.01, СПК G01M 9/00, 2018.02). Способ управления положением модели в аэродинамической трубе включает размещение модели между двумя узлами крепления державки к силовым механизмам, что позволяет изменять положение центра масс ЛА по трем параметрам: углу атаки, вертикальное перемещение и горизонтальное перемещение, а также возвращать в начальное положение при отказе одного из приводов.
Этот способ управления имеет недостаток, влияющий на качество подготовки и проведения эксперимента, в этом способе не учитывают габариты модели, а это значит, что во время эксперимента возможно, что испытываемая модель ЛА может выйти за пределы характеристического ромба, что сильно влияет на аэродинамические характеристики модели, которые получаем в процессе эксперимента.
Задачей и техническим результатом изобретения является разработка способа управления положением модели в аэродинамической трубе, позволяющего изменять непрерывно в процессе эксперимента положение испытываемой модели относительно вектора скорости набегающего потока и оси трубы автоматически в соответствии с заданной программой (изменение угла между осью модели и вектором скорости набегающего потока, перемещение по двум координатным осям, возвращение модели в «нуль» при отказе одного из приводов), а также осуществлять параллельные оси трубы перемещения с заданной точностью, изменять положение модели, учитывать расположение модели в характеристическом ромбе.
Решение поставленной задачи и технический результат достигаются тем, что в способе управления положением модели в аэродинамической трубе, включающий размещение модели на державке с возможностью изменения положения модели в набегающем потоке осуществляют в одной плоскости по заданной программе, причем при изменении положения модели осуществляют контроль нахождения модели в пределах характеристического ромба и автоматически корректируют положение модели во время эксперимента для обеспечения нахождения модели в пределах характеристического ромба. Кроме того, изменение положения модели осуществляют с помощью как минимум двух пар последовательно установленных линейных приводов, расположенных в одной или параллельной плоскостях.
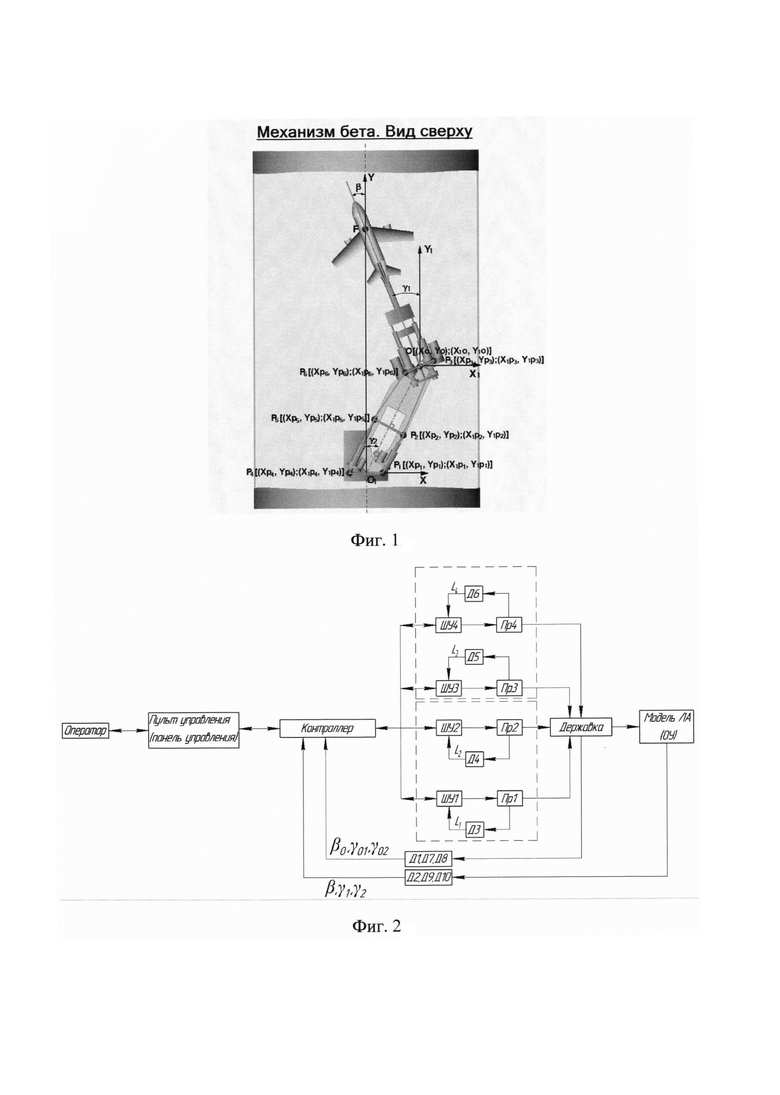
На фиг. 1 представлен механизм управления углом скольжения модели β.
На фиг. 2 представлена принципиальная схема управления.
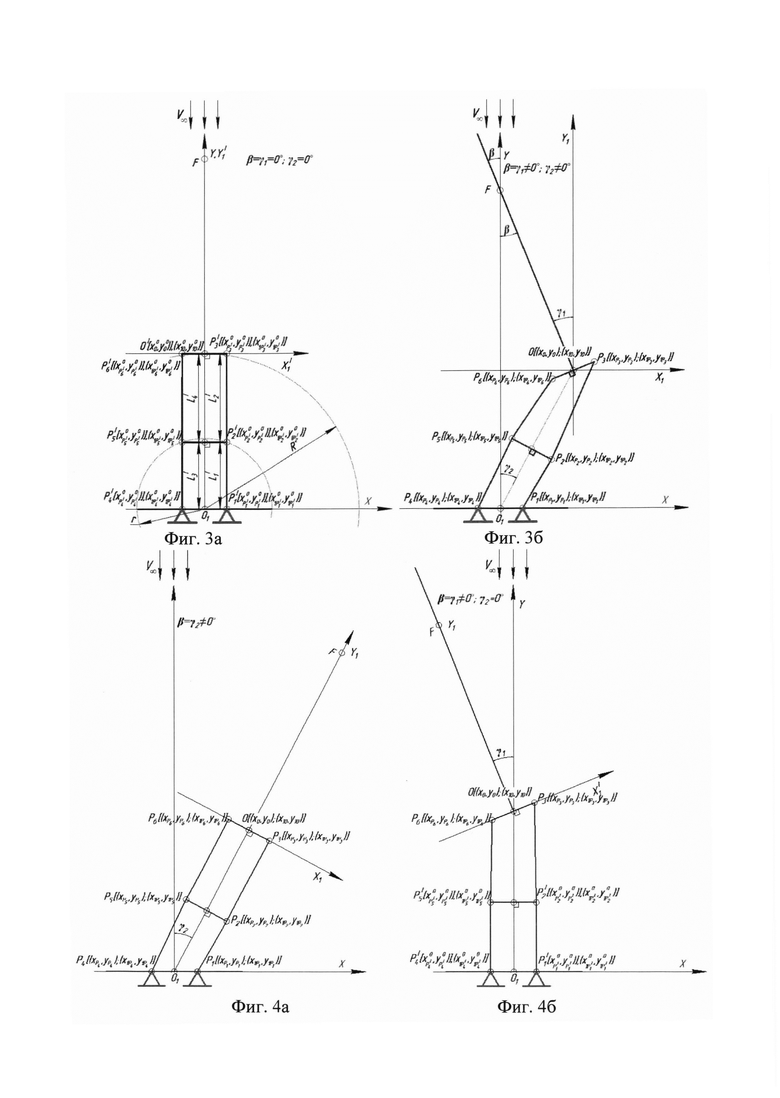
На фиг. 3а), б) представлена кинематическая схема управления углом скольжения β модели ЛА с использованием в качестве приводных механизмов четырех линейных приводов а) начальное положение механизма в начальный момент времени (t=0); б) конечное положение механизма, когда фокус сил модели расположен на оси трубы и достигнут заданный угол скольжения (параметр управления).
На фиг. 4а), б), в) представлена кинематическая схема механизма «β» при вращении или перемещении: а) относительно первой оси вращения связанной с механизмом, б) относительно второй оси вращения связанной с механизмом, в) параллельные оси трубы манипуляции.
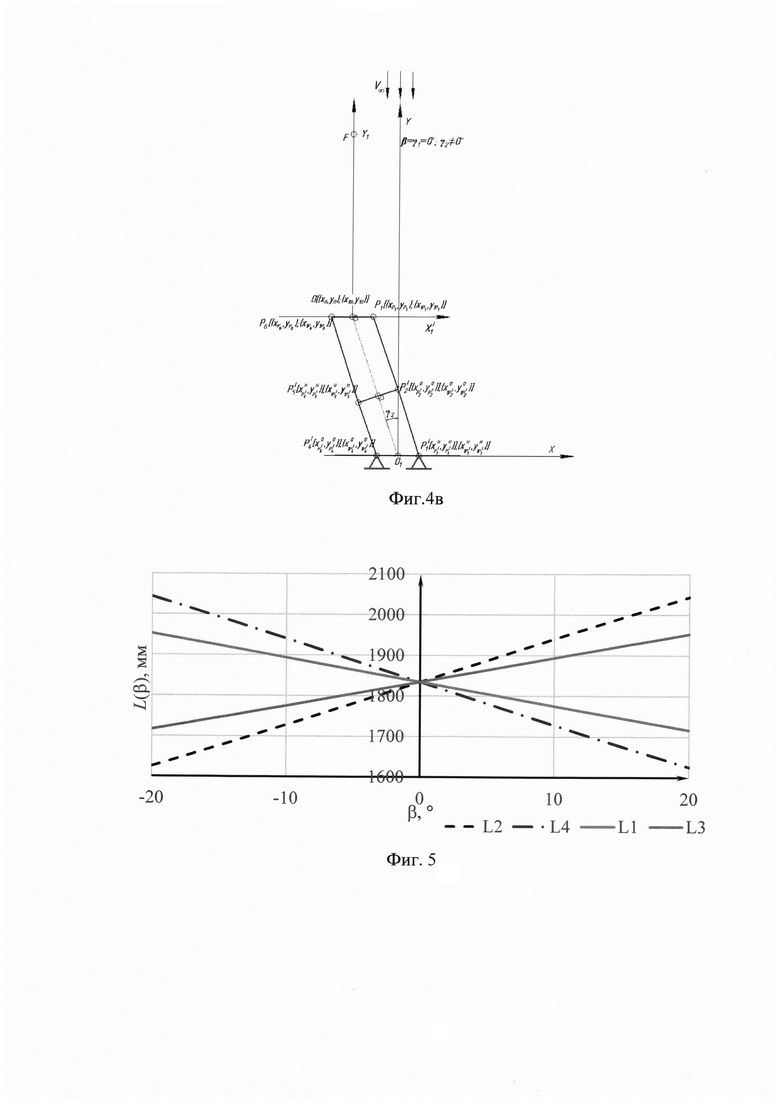
На фиг. 5 представлены зависимости изменения длины штоков четырех линейных приводов от угла β при управлении по заданной программе.
Модель размещают на державке, которая непосредственно является элементом исполнительного механизма, в зависимости от того в какой плоскости (горизонтальной или вертикальной) установлен механизм, модель соответственно будет менять угол скольжения, угол атаки, и другие технологические перемещения по заданной программе.
Примером использования данного способа является один из частных случаев: изменение угла скольжения модели в рабочей части АДТ, т.к. механизм который меняет положение модели в набегающем потоке может быть расположен в горизонтальной плоскости трубы.
Принцип управления изменением угла скольжения (β - как частный случай) на поддерживающем устройстве с хвостовой державкой основан на повороте державки относительно двух центров вращения О и O1 (фиг. 1) с помощью двух пар последовательно установленных линейных приводов, расположенных в одной или параллельной плоскостях.
Согласно фиг. 1 разворот модели ЛА на заданный угол скольжения β осуществляют устройством за счет разворота державки относительно двух центров вращения О и О1 (оси вращения связанные с механизмом изменения угла скольжения). Точка F на фиг. 1 - расположение фокуса сил модели ЛА. Если α=0°, тогда OF - главная продольная ось инерции ЛА (сонаправлена с осью державки) - лежит в горизонтальной плоскости (т.е. параллельна полу РЧ АДТ) и в этой плоскости рассматривают вращение механизма по углу β, если α≠0°, то OF - проекция главной продольной оси инерции ЛА на горизонтальную плоскость.
На фиг. 2 представлена принципиальная схема управления. Оператор с пульта управления задает на контроллер параметр управления (угол скольжения модели, т.к. рассматриваем перемещение в горизонтальной плоскости как пример, параллельные оси трубы перемещения и т.д.) и его конечное значение. На каждом шаге управления контроллер рассчитывает задание на изменение координат приводных узлов и длины штоков линейных приводов. С контроллера управляющий сигнал на выдвижение, реверс или останов штоков линейных приводов поступает в шкафы управления линейных приводов ШУ1, ШУ2, ШУ3, ШУ4, из шкафов управления сигнал поступает на линейные приводы Пр1, Пр2, Пр3, Пр4, и соответствующие штоки изменяют свою длину до заданного значения, происходит заданный поворот или перемещение державки с моделью ЛА. Обратная связь осуществляют через датчики положения Д3, Д4, Д5, Д6, которые измеряют длины штоков с высокой точностью. В шкафы управления и, далее, в контроллер поступает информация о текущих длинах штоков. Контроллер контролирует выполнение задания. Если на такте управления какой-либо привод не выполняет задание, то ситуация считается аварийной, и контроллер меняет режим работы системы на аварийный (останов неисправного привода и возвращение модели в положение, при котором продольная ось модели будет параллельна оси трубы двумя рабочими приводами). При достижении заданного положения державки и (или) модели ЛА по показаниям датчиков Д3, Д4, Д5, Д6 и положения державки Д1, Д7, Д8 и (или) положения модели Д2, Д9, Д10 задание считается выполненным, и контроллер дает команду на останов линейных приводов. За счет того, что система управления построена в соответствии со структурой фиг. 2, при изменении положения модели осуществляют контроль нахождения модели в пределах характеристического ромба (датчики Д2, Д9, Д10) и автоматически корректируют положение модели во время эксперимента, также возможен учет габаритов модели, чтобы модель не уперлась в стену рабочей части АДТ, и не симметричность (примером служат испытания полумодели самолета).
На фиг. 3 представлена кинематическая схема управления механизмом
Согласно фиг 3б) разворот модели ЛА на заданный угол скольжения β осуществляют устройством за счет разворота державки относительно двух центров вращения О и O1, так чтобы фокус сил модели был расположен на оси трубы и достигнут заданный угол скольжения.
Согласно фиг 4а) разворот модели ЛА на заданный угол скольжения β осуществляют устройством за счет разворота державки относительно «первой» оси вращения связанной с механизмом.
Согласно фиг 4б) разворот модели ЛА на заданный угол скольжения β осуществляют устройством за счет разворота державки относительно «второй» оси вращения связанной с механизмом.
Согласно фиг 4в) изменение положения модели ЛА относительно оси трубы осуществляют устройством за счет разворота державки относительно двух осей вращения, связанных с механизмом. За счет аналогичного перемещения, возвращают модель в «нуль» при отказе одного из линейных приводов, разворачивая механизм относительно одной из осей связанной с ним.
Для осуществления способа управления механизмом изменения угла скольжения модели ЛА в РЧ АДТ вводят измерительную декартову систему координат (СК) XO1Y (см. фиг. 3), в которой O1 - начало СК, расположение которого задается из конструкции РЧ АДТ, также O1 - центр вращения механизма, O1Y- ось, расположенная в горизонтальной плоскости, направленная обратно вектору скорости набегающего потока V∞ и совпадает с продольной осью РЧ АДТ, проходящая через O1, O1X - ось, расположенная в горизонтальной плоскости и ортогональная оси O1Y, β - угол между осью O1Y и OF. Также вводят СК X1OY1, связанную с еще одним центром вращения механизма - О (начало указанной декартовой СК). Ось OY1 расположена в горизонтальной плоскости и параллельна O1Y (или оси трубы), ось ОХ1 ортогональна OY1 и находится в этой же плоскости.
На фиг. 3а) О' - расположение центра вращения (О) механизма в начальный момент времени в СК X1OY1, имеющего следующие координаты  B СК XO1
B СК XO1 
 - узлы (точки) крепления линейных приводов к механизму. Эти точки в начальный момент времени в СК X1OY1 имеют следующие координаты:
- узлы (точки) крепления линейных приводов к механизму. Эти точки в начальный момент времени в СК X1OY1 имеют следующие координаты:  В СК XO1Y1
В СК XO1Y1 
 - узлы (точки) крепления штоков линейных приводов к механизму. Эти точки в начальный момент времени в СК X1OY1 имеют следующие координаты:
- узлы (точки) крепления штоков линейных приводов к механизму. Эти точки в начальный момент времени в СК X1OY1 имеют следующие координаты: 
 В СК XO1Y:
В СК XO1Y: 
 - начальные длины штоков линейных приводов, расположенных в соответствующих точках
- начальные длины штоков линейных приводов, расположенных в соответствующих точках 
При любом вращении механизма О' будет описывать траекторию в виде окружности с радиусом  (при
(при  и
и  заданным конструкцией.
заданным конструкцией.
При вращении механизма относительно O1 точки  будут двигаться по траектории в виде окружности радиуса
будут двигаться по траектории в виде окружности радиуса 
На фиг. 3б) О - расположение центра вращения механизма в конечный момент времени. В СК X1OY1 координаты О: O(x1O, y1O), в СК XO1Y координаты О: O(xO,yO).
Р1, Р2, Р4, Р5 - узлы (точки) крепления линейных приводов к механизму. Эти точки в конечный момент времени в СК X1OY1 имеют координаты:  в СК XO1Y имеют следующие координаты:
в СК XO1Y имеют следующие координаты: 
Р3, Р6, Р2, Р5 - узлы (точки) крепления штоков линейных приводов к механизму. Эти точки в конечный момент времени в СК X1OY1 имеют координаты:  в СК XO1Y имеют следующие координаты:
в СК XO1Y имеют следующие координаты: 
γ1 - угол между осью OY1 и проекцией оси державки на плоскость X1OY1. Угол положительный, если механизм вращается относительно центра О против часовой стрелки в плоскости X1OY1, если по часовой, то угол отрицательный.
γ2 - угол между осью O1Y и прямой, проходящей через центры вращения О, O1 механизма изменения угла β. Угол положительный, если механизм вращается относительно центра O1 против часовой стрелки в плоскости XO1Y, если по часовой, то угол отрицательный.
Управление изменением положения модели может вестись несколькими вариантами, например:
1) сперва осуществляют разворот относительно верхнего центра вращения (на угол γ1 равный заданному углу скольжения), затем нижнего (фиг. 3б) (рассчитав по заданному углу β угол γ2) так чтобы фокус сил оказался на оси трубы (т.к. габариты исследуемой модели могут быть велики, то при развороте относительно верхнего центра вращения, модель может столкнуться со стенкой РЧ АДТ (с закрытой рабочей частью);
2) по заданному углу β рассчитывают угол γ2, и разворачивают механизм на этот угол относительно нижнего центра вращения, затем осуществляют разворот относительно верхнего центра вращения на заданный угол β;
3) разворот осуществляют сразу относительно 2-х центров вращения с учетом рассчитанного ранее γ2,
4) разворот осуществляют относительно верхнего центра вращения;
5) разворот осуществляют относительно нижнего центра вращения.
Для осуществления изменения угла β модели летательного аппарата или перемещения относительно оси трубы используют координатный метод. Так как варианты управления изменением положения модели аналогичны друг другу, то ниже приведен пример реализации способа управления механизмом по первому пункту (сперва осуществляют разворот относительно верхнего центра вращения, затем).
Способ управления механизмом изменения угла скольжения модели летательного аппарата в рабочей части аэродинамической трубы подразумевает два разворота I - разворот относительно О, II - разворот относительно O1. С учетом введенных обозначений управление установкой угла β на поддерживающем устройстве будет следующим.
Для разворота относительно О СК X1OY1 указывают координаты:
- точек крепления линейных приводов 
- точек крепления штоков линейных приводов к механизму 
- центра вращения 
Задают угол β.
Управление начинают вести двумя приводными узлами механизма Р3 и Р6 автоматически с помощью двух линейных приводов по скорости выдвижения штоков в зависимости от β:
где β0 - исходный угол скольжения;
Δβ [n] - приращение угла скольжения на n-ном такте управления:
Δβ[n]=ω[n]⋅Δt,
где Δt - временной интервал выдачи команд управления (квант управления);
параметр ω=ω[n] - текущая угловая скорость изменения β, вычисляемая как функция номера n кванта (шага) управления.
Это обеспечивает выполнение требования плавности разгона и торможения при управлении углом β во избежание колебательных возмущений движения модели, способных увеличить время и ухудшить качество эксперимента.
β=γ1.
Управление ведут по скорости (с заданным профилем). Для определения скорости выдвижения штоков необходимо знать приращение длин штоков ΔL2(γ1), ΔL4(γ1), которые рассчитывают следующим образом.
Задают R(γ1) - матрица вращения относительно центра О следующего вида:
Координаты двух приводных узлов механизма Р3 и Р6, в зависимости от γ1 имеют следующий вид и обозначение:


Длины штоков рассчитывают по формулам


приращение соответствующих длин штоков определяют по следующим зависимостям:


где  - длины штоков на предыдущем такте управления.
- длины штоков на предыдущем такте управления.
Конечный шаг управления (последний такт) осуществляют по положению модели для коррекции угла скольжения.
Для осуществления разворота (II) относительно нижнего центра находят γ2, т.к. при повороте механизма именно на этот угол, фокус сил окажется на оси трубы.
Известны следующие значения величин (см. фиг. 3):
OF - расстояние от верхнего центра вращения до фокуса сил модели ЛА;
OO1 - расстояние между центрами вращения.
При развороте механизма на любой угол меньше 90° относительно верхнего центра, нижнего центра, или того и другого, расстояние между фокусом сил и нижним центром вращения (R0) рассчитывают по следующей зависимости:

Угол γ2 определяют по формуле
В СК XO1Y указывают координаты:
- точек крепления линейных приводов 
- точек крепления штоков линейных приводов к механизму 
- центра вращения 
Управление ведут по заданному γ2 с помощью двух приводных узлов механизма Р2 и Р5 автоматически по скорости выдвижения штоков в зависимости от γ2.
где  - исходный угол разворота механизма относительно центра вращения O1; Δγ2[n] - приращение угла γ2 на n-ном такте управления:
- исходный угол разворота механизма относительно центра вращения O1; Δγ2[n] - приращение угла γ2 на n-ном такте управления:
Δγ2[n]=ω[n]⋅Δt,
где Δt - временной интервал выдачи команд управления (квант управления);
параметр ω=ω[n] - текущая угловая скорость изменения γ2, вычисляемая как функция номера n кванта управления.
Это обеспечивает выполнение требования плавности разгона и торможения при управлении углом β во избежание колебательных возмущений движения модели, способных увеличить время и ухудшить качество.
Управление ведут по скорости (с заданным профилем). Для определения скорости выдвижения штоков необходимо знать приращение длин штоков ΔL1(γ2), ΔL3(γ2), которые рассчитывают следующим образом.
Задают R(γ2) - матрица вращения относительно центра O1, аналогично матрице R(γ1).
Координаты двух приводных узлов механизма Р2 и Р5, в зависимости от γ2, по имеют следующий вид и обозначение:


Длины штоков по


а приращение соответствующих длин штоков


где  - длины штоков на предыдущем такте управления.
- длины штоков на предыдущем такте управления.
Конечный шаг управления (последний такт) осуществляют по положению модели для коррекции угла скольжения.
Получили графики зависимости изменения длин штоков четырех линейных приводов от β при управлении по заданной программе (фиг. 5). По графикам видно, что зависимость длин штоков от угла скольжения прямолинейна, а это очень важно в управлении, т.к. линейные зависимости просты в реализации.
Технический результат от использования способа заключающийся в изменении положения модели в набегающем потоке непрерывно в процессе эксперимента в одной плоскости автоматически в соответствии с заданной программой (изменение угла между осью модели и вектором скорости набегающего потока, перемещение по двум координатным осям, возвращение модели в «нуль» при отказе одного из приводов), а также в осуществлении параллельных оси трубы перемещений с заданной точностью, в проверке расположения модели в характеристическом ромбе и автоматической корректировке положения модели во время эксперимента для обеспечения нахождения модели в пределах характеристического ромба, также возможен учет габаритов модели, чтобы модель не уперлась в стену рабочей части АДТ (иначе может возникнуть аварийная ситуация: поломка оборудования, или создание колебаний всей поддерживающей конструкции), и не симметричность (примером служат испытания полумодели самолета), подтвержден математическим моделированием.
Изобретение относится к области экспериментальной аэродинамики, в частности к автоматическим системам управления положением модели в аэродинамических трубах. Способ включает размещение модели на державке с возможностью изменения положения модели в набегающем потоке в одной плоскости по заданной программе, при изменении положения модели осуществляют контроль нахождения модели в пределах характеристического ромба и автоматически корректируют положение модели во время эксперимента. Изменение положения модели осуществляют с помощью как минимум двух пар последовательно установленных линейных приводов, расположенных в одной или параллельной плоскостях. Технический результат заключается в обеспечении изменения положения модели в набегающем потоке непрерывно в процессе эксперимента в одной плоскости автоматически в соответствии с заданной программой в пределах характеристического ромба, также учете габаритов модели в аэродинамической трубе. 1 з.п. ф-лы, 5 ил. 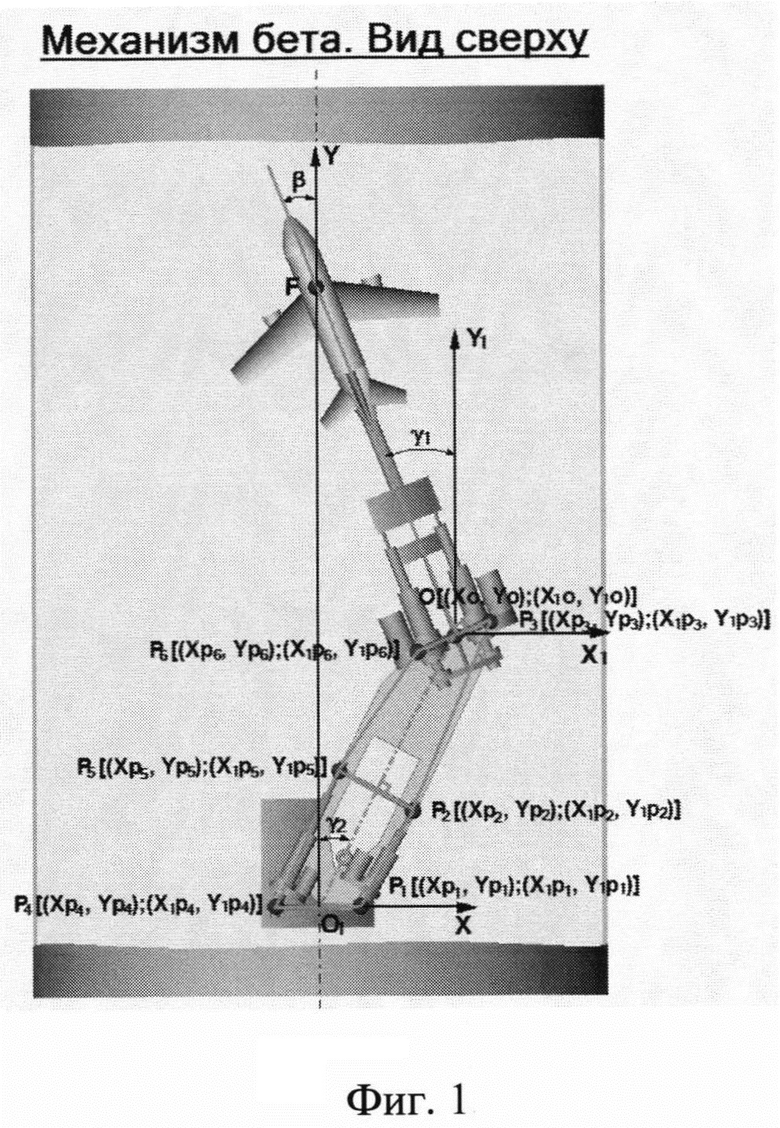
1. Способ управления положением модели в аэродинамической трубе, включающий размещение модели на державке с возможностью изменения положения модели в набегающем потоке в одной плоскости по заданной программе, отличающийся тем, что при изменении положения модели осуществляют контроль нахождения модели в пределах характеристического ромба и автоматически корректируют положение модели во время эксперимента для обеспечения нахождения модели в пределах характеристического ромба.
2. Способ управления положением модели в аэродинамической трубе по п. 1, отличающийся тем, что изменение положения модели осуществляют с помощью как минимум двух пар последовательно установленных линейных приводов, расположенных в одной или параллельной плоскостях.
| Способ управления положением модели в аэродинамической трубе | 2017 |
|
RU2660225C1 |
| Устройство для изменения положения модели в рабочей части аэродинамической трубы | 2018 |
|
RU2690097C1 |
| CN 109269758 A, 25.01.2019 | |||
| CN 206362518 U, 28.07 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

