Изобретение относится к сенсорному устройству для транспортного средства или тягача из комбинации транспортных средств, способу использования сенсорного устройства и, в частности, к размещению датчика заднего обзора окружающей обстановки.
Автономная работа транспортных средств является областью повышенного интереса. Все больше и больше функций должны быть интегрированы в аппаратную инфраструктуру транспортного средства, которая включает в себя датчики различных типов, а также технологии восприятия. В современных технологиях уровень автоматизации по-прежнему требует присутствия и внимания водителя транспортного средства. Однако системы следующего уровня должны быть управляемыми, чтобы выполнять автоматическое вождение без постоянного внимания водителя, и, таким образом, необходимо, чтобы они имели повышенные возможности обнаружения обстановки.
Коммерческие транспортные средства на современном этапе развития технологии могут содержать датчики переднего обзора, например, радар дальнего действия для адаптивного круиз-контроля (ACC) и для усовершенствованных систем экстренного торможения (AEBS), и камеры средней дальности для систем предупреждения о съезде с полосы движения (LDWS). Например, в документе ЕР 1386774 раскрыто устройство управления тормозами коммерческих транспортных средств с радаром переднего обзора, в документе JP 2012-246828 раскрыта камера, установленная спереди транспортного средства, которая используется для LDWS и снижения оборотов холостого хода двигателя, и в документе CN 203255120 раскрыта система AEBS с фронтальным радаром и другими датчиками.
Однако в случае высокоавтоматизированных транспортных средств, когда водитель больше не находится в замкнутой системе автоматического управления, необходим полный охват заднего обзора, который включает в себя заднюю зону прицепа. Например, для обеспечения возможностей автоматической смены полосы движения, которые не полностью охватываются традиционными системами, следует также надежно контролировать заднюю зону в непосредственной близости от прицепа, которая является мертвой зоной для зеркал заднего вида водителя. Известные системы не способны обеспечить надежный механизм обнаружения объектов, расположенных непосредственно за транспортным средством или сбоку от транспортного средства.
Таким образом, существует потребность в сенсорных устройствах, которые могут использоваться для транспортных средств, которые способны буксировать прицепы, и обеспечивать надежный охват мертвой зоны позади прицепа.
По меньшей мере некоторые из проблем, описанных выше, решены посредством сенсорного устройства по п. 1 или способа по п. 12. Зависимые пункты формулы изобретения характеризуют дополнительные предпочтительные варианты выполнения объектов, определенных в независимых пунктах формулы изобретения.
Изобретение относится к сенсорному устройству для обнаружения объекта в окружении прицепа при буксировке транспортным средством. Сенсорное устройство содержит по меньшей мере один датчик, установленный на задней стороне транспортного средства с зоной обзора под прицепом и выполненный с возможностью захвата сигнала обнаружения от объекта. Сенсорное устройство дополнительно содержит блок управления, выполненный с возможностью приема указывающего на объект сигнала от по меньшей мере одного датчика и подтверждения присутствия объекта позади или сбоку от прицепа.
Следует понимать, что транспортное средство или прицеп не является частью заявленного сенсорного устройства. Однако сенсорное устройство выполнено с возможностью (например, путем установки соответствующего программного обеспечения в блок управления) обнаружения при его установке на транспортном средстве. Сигналы обнаружения от объекта могут быть любыми сигналами, которые исходят от объекта, независимо от того, отражаются эти сигналы от объекта или излучаются объектом. Поле зрения может представлять собой по меньшей мере часть захваченной зоны или направление наблюдения.
При необходимости блок управления выполнен с возможностью оповещения водителя или системы автоматического управления транспортного средства о присутствии объекта позади или сбоку от прицепа. Например, оповещение водителя может включать в себя оптический, звуковой или тактильный сигнал, подаваемый водителю.
Блок управления может быть дополнительно выполнен с возможностью определения расстояния от объекта до задней стороны транспортного средства или прицепа. Для достижения этой функции блок управления может получать информацию о длине прицепа из базы данных или любого запоминающего устройства, установленного на транспортном средстве, и учитывать эту информацию о длине. Блок управления может быть дополнительно выполнен с возможностью использования этой информации о длине, чтобы игнорировать все возможные сигналы обнаружения, принятые из положения под прицепом.
Блок управления может быть также выполнен с возможностью различения сигналов датчиков, принятых от компонентов прицепа (или любого другого препятствия), и сигнала обнаружения, принятого от объекта. При необходимости эти сигналы датчиков, принятые от компонентов прицепа, могут игнорироваться при подтверждении присутствия объекта. Следовательно, блок управления может учитывать сигнал датчика только от объекта в процессе подтверждения присутствия.
При необходимости блок управления выполнен с возможностью обнаружения (или сканирования) непосредственно прицепа или одного или нескольких его компонентов (например, в начале поездки). Блок управления может также периодически обнаруживать прицеп для идентификации относительных перемещений прицепа по сравнению с транспортным средством. Знания о прицепе или его компонентах можно использовать для различения сигналов, принимаемых от объекта (сигналов обнаружения), и сигналов, принимаемых от прицепа.
Таким образом, блок управления можно выполнить с возможностью определения угла сочленения между транспортным средством и прицепом на основании обнаружения прицепа или по меньшей мере одного из его компонентов.
При необходимости блок управления выполнен с возможностью обнаружения объекта на основе сигналов, отраженных от земли или препятствия между объектом, и по меньшей мере одним датчиком (или от дома, стены или других транспортных средств).
При необходимости по меньшей мере один датчик содержит по меньшей мере один из следующих блоков: радар, ультразвуковой датчик, лидар, камеру или датчик окружающей обстановки любого другого типа.
По меньшей мере один датчик может также содержать по меньшей мере два блока датчиков для захвата по меньшей мере двух видов с разных ракурсов. В результате блок управления может быть выполнен с возможностью приема от каждого из по меньшей мере двух датчиков соответствующего сигнала и использования указанных по меньшей мере двух сигналов датчика для по меньшей мере одной из следующих функций: создания стереографической картинки, определение расстояния до объекта, повышение точности обнаружения на основе избыточности сигнала (например, используя один сигнал обнаружения в качестве подтверждения другого сигнала обнаружения).
Изобретение также относится к транспортному средству с одним упомянутыми сенсорным устройством. Транспортное средство может быть коммерческим транспортным средством или тягачом из комбинации транспортных средств. Блок управления может представлять собой любой блок управления, находящийся в транспортном средстве или в его части. Функции могут быть реализованы с помощью соответствующего программного обеспечения, установленного в таком блоке управления.
Изобретение также относится к способу обнаружения объекта в окружении прицепа при буксировке транспортным средством. Способ включает в себя этапы, на которых:
- обеспечивают захват сигнала обнаружения от объекта посредством по меньшей мере одного датчика на задней стороне транспортного средства с зоной обзора под прицепом;
- обеспечивают прием блоком управления сигнала от по меньшей мере одного датчика, указывающего на объект; и
- подтверждают присутствие объекта позади или сбоку от прицепа.
Этот способ может быть также реализован в программном обеспечении, или компьютерной программе или программном модуле в электронном блоке управления. Таким образом, вариант выполнения относится также к компьютерной программе, имеющей программный код для выполнения способа в том случае, когда компьютерная программа выполняется на процессоре.
По сравнению с традиционными системами, варианты осуществления изобретения обеспечивают следующие преимущества. Хотя любой датчик, установленный на прицепе, можно также использовать для обнаружения окружающей обстановки, в настоящее время отсутствует стандартизированный интерфейс между тягачом и прицепом для имеющихся комбинаций коммерческих транспортных средств, который мог бы передавать информацию о восприятии окружающей обстановки из прицепа назад в тягач. Поскольку тягачи обычно используются с различными прицепами, обнаружение традиционной окружающей обстановки зависит от установки конкретного прицепа. Таким образом, варианты осуществления изобретения могут использоваться особенно для таких комбинаций транспортных средств, где система тягача несовместима с датчиками, установленными на прицепе. Следовательно, варианты выполнения полезны для обнаружения окружающей обстановки всех зон вокруг транспортного средства – не только передней, левой и правой зон. Эти зоны охватываются исключительно от тягача. Однако обнаружение не базируется, в частности, на конкретном прицепе, не зависит от прицепа и может использоваться практически для любого прицепа при условии, что под ним имеется достаточная зона обзора.
Этот эффект достигается за счет выполнения сенсорного устройства, которое захватывает данные датчика снизу прицепа и, таким образом, способен обнаруживать окружающую обстановку вокруг прицепа от тягача и особенно способен контролировать заднюю зону прицепа. Для правильной интерпретации сигналов датчиков блок управления выполнен с учетом возможных компонентов прицепа. Таким образом, отсутствует необходимость в установке датчиков на прицепе. Это обеспечивает преимущество, которое состоит в том, что прицеп и, возможно, датчики, установленные на прицепе, не обязательно должны быть совместимыми с системой тягача.
Некоторые примеры устройства и/или способов будут описаны ниже только в качестве примеров со ссылкой на приложенные чертежи.
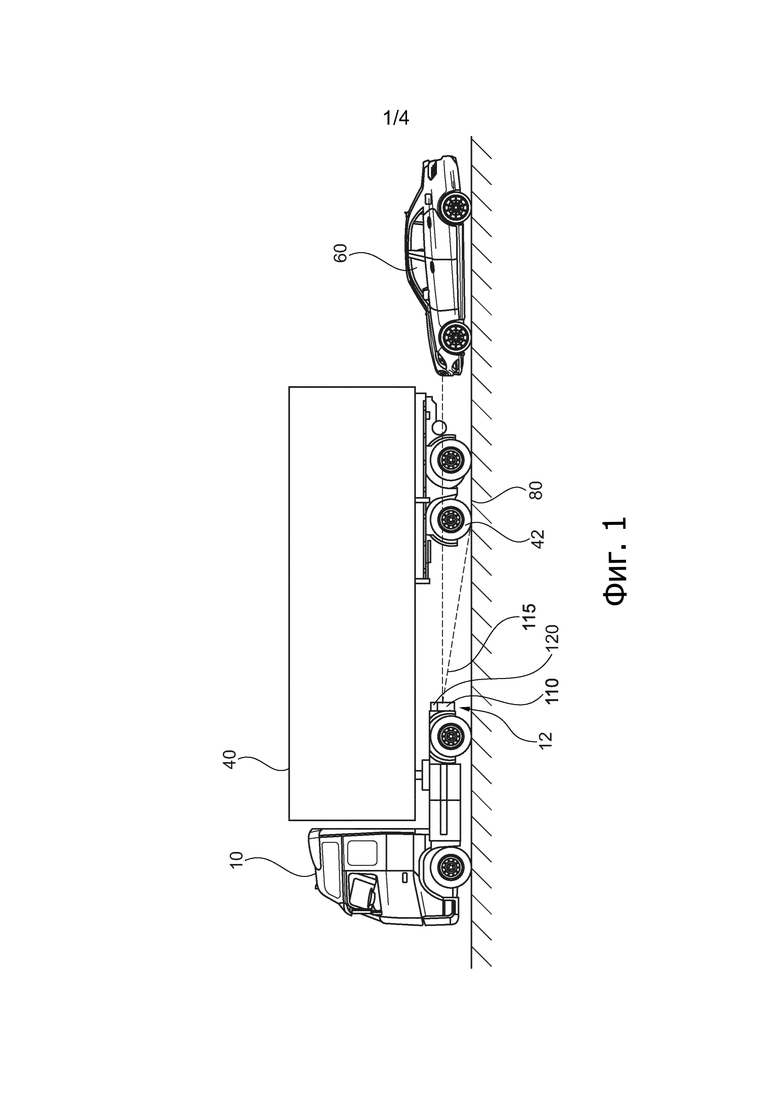
На фиг. 1 показано сенсорное устройство для обнаружения объектов согласно варианту осуществления изобретения;
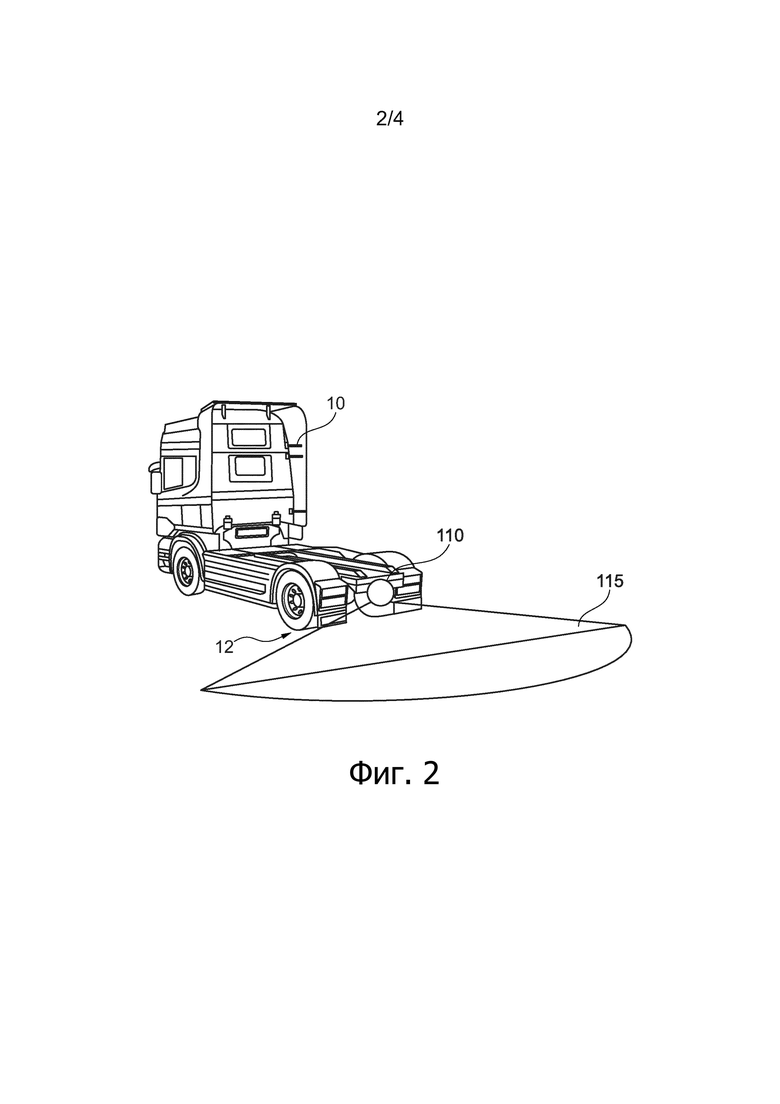
на фиг. 2 - размещение датчика заднего обзора на задней наружной поверхности коммерческого транспортного средства;
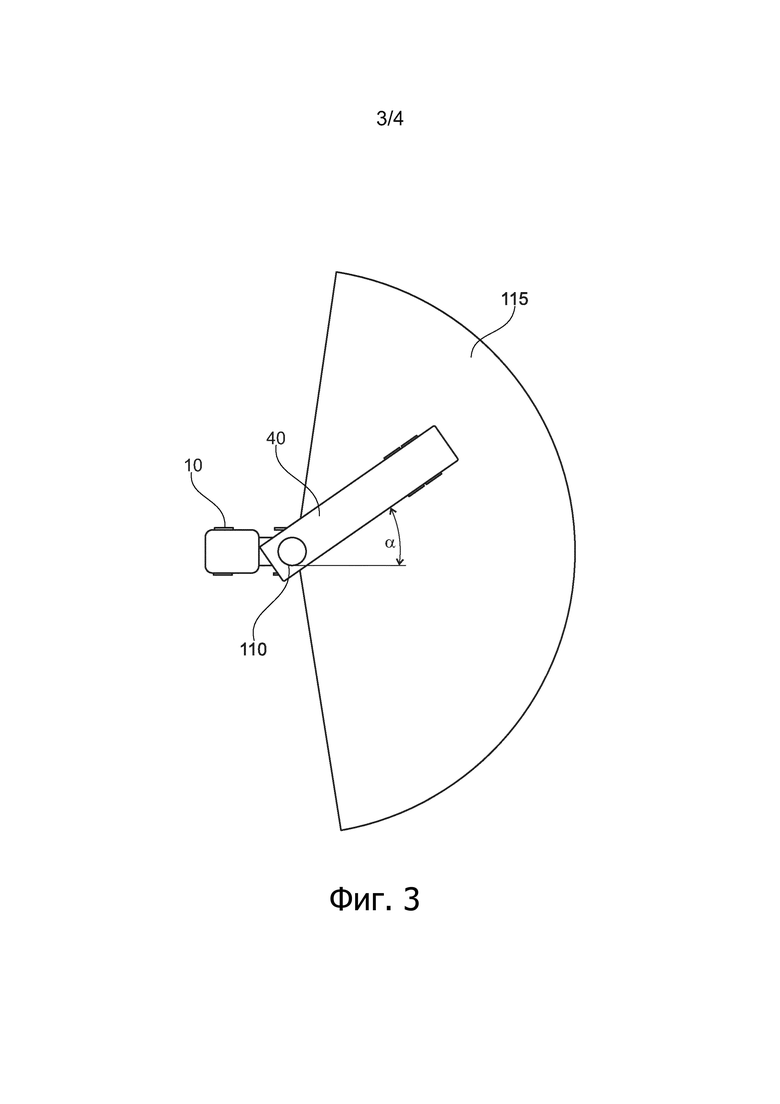
на фиг. 3 - поле зрения датчика заднего обзора окружающей обстановки для коммерческого моторизированного транспортного средства для работы с системой автоматического управления; и
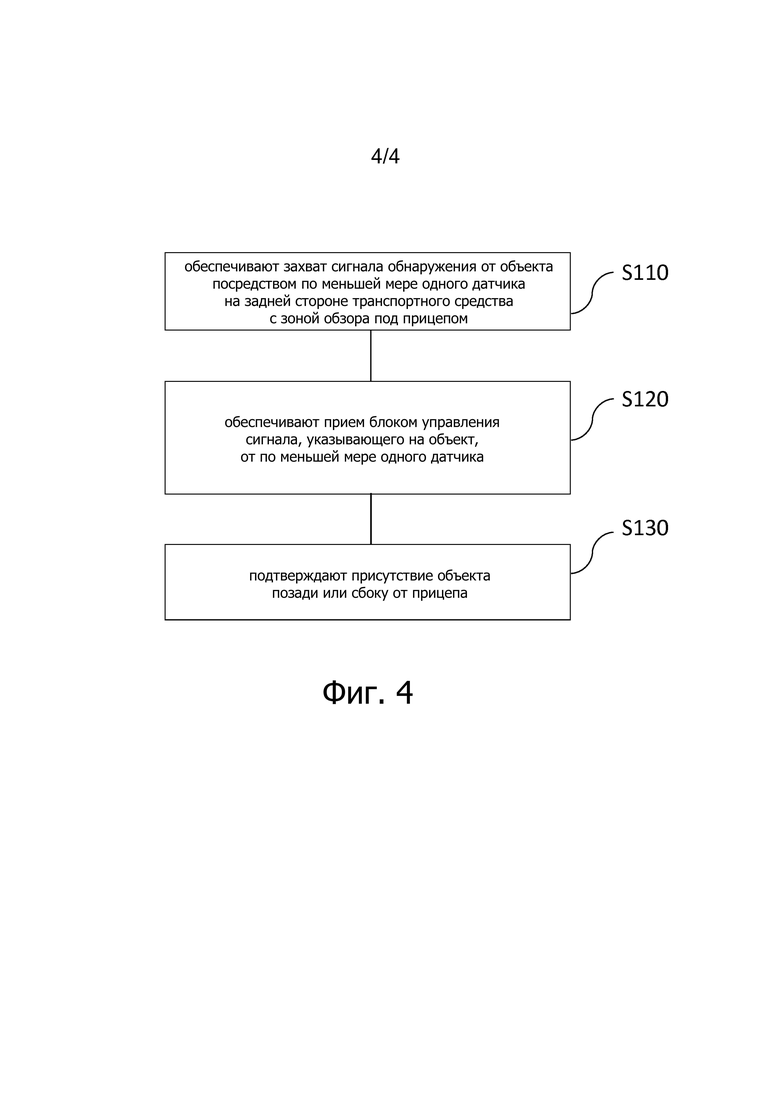
на фиг. 4 показана блок-схема последовательности операций способа обнаружения объектов.
На фиг. 1 показано сенсорное устройство, которое приспособлено для обнаружения объекта 60 в окружении прицепа 40 при буксировке транспортным средством или тягачом 10. Сенсорное устройство содержит по меньшей мере один датчик 110 и блок 120 управления, которые, например, могут быть размещены в общем корпусе. По меньшей мере один датчик 110 выполнен с возможностью приема сигналов обнаружения от объектов 60, расположенных в окружении транспортного средства 10, и дополнительно выполнен с возможностью установки на задней стороне 12 транспортного средства 10 с направлением 115 наблюдения под прицепом 40. Блок 120 управления выполнен с возможностью приема сигнала датчика по меньшей мере от одного датчика 110. Сигнал датчика указывает объект 60, находящийся позади или сбоку от прицепа 40. Блок 120 управления также выполнен с возможностью подтверждения присутствия объекта 60.
Блок 120 управления может быть дополнительно выполнен с возможностью подключения к электрической шинной системе прицепа или может быть соединен любым другим способом (например, беспроводным или с помощью сигнальных линий) с другим электронным блоком управления транспортного средства 10, чтобы предоставить информацию относительно обнаружения объекта 60. Например, объект 60 может быть другим транспортным средством, движущимся за комбинацией 10, 40 транспортных средств (например, в мертвой точке). Им может быть также человек или любой другой объект, присутствующий в непосредственной близости от комбинации 10, 40 транспортных средств. В частности, блок 120 управления выполнен с возможностью различения сигналов, принимаемых от направления 115 наблюдения по отношению к происхождению этих сигналов. Например, блок 120 управления может идентифицировать компоненты прицепа 40, такие, например, как колеса 42, или оси или любой другой компонент прицепа 40. Например, эти сигналы могут быть отфильтрованы для того, чтобы использовать только сигналы, принятые от объекта 60, который не является частью комбинации 10, 40 транспортных средств, в качестве потенциального сигнала обнаружения, который может инициировать предупреждение, предоставляемое водителю транспортного средства 10 или в систему автоматического управления вождением. Сигналы, принимаемые от объекта 40, могут быть оптическими сигналами или радиолокационными сигналами, которые могут или не могут отражаться от поверхности земли 80 (например, от дороги). Таким образом, блок 120 управления можно выполнить, основываясь на сохраненном программном обеспечении, интерпретации принятых сигналов по меньшей мере с помощью одного датчика 110 должным образом для того, чтобы отличить различные компоненты прицепа 40 от объектов 60, представляющих интерес.
Таким образом, эта сенсорное устройство позволяет охватить мертвую зону позади прицепа, которая обычно не видна из тягача, так как водительские зеркала не охватывают эту область. Изобретении используется днище прицепа, которые часто блокируются только частично, так что становится возможным обзор назад от тягача при правильном размещении датчиков. Это обеспечивает полный задний охват комбинаций тягач-прицеп, необходимых для будущего автоматического вождения.
В качестве примера коммерческого транспортного средства на фиг.2 показана компоновка тягача 10 с полуприцепом. По меньшей мере один датчик 110 установлен на задней стороне 12 транспортного средства 10 для охвата диапазона 115 заднего обзора. Например, по меньшей мере один датчик 110 установлен на транспортном средстве 10 в положении, позволяющем контролировать диапазон чуть выше дороги. Более того, по меньшей мере один датчик 110 может быть выполнен с возможностью обнаружения также отраженных сигналов в зоне 115 обнаружения, которые отражаются от препятствия позади задней стороны 12 транспортного средства 10. Таким образом, один или несколько датчиков 110 заднего обзора, размещенных на задней стороне 12 тягача 10, могут захватывать диапазон 115 под днищем прицепа.
Изобретение не ограничено одним датчиком, установленным на тягаче 10. Вместо этого на тягаче 10 можно также установить по меньшей мере два датчика 111, 112. В результате, можно получить два сигнала датчика независимо друг от друга так, что избыточность повышает надежность обнаружения возможных объектов вокруг примерного тягача 10. Кроме того, с задней стороны примерного тягача 10 можно выработать стереографическое изображение, которое позволяет, например, определить расстояние до объекта или возможное перемещение объекта в непосредственной близости от примерного тягача 10.
Датчик(и) 110 может (могут) видеть не только прицеп 40, как ближайший объект, но также и объекты, находящиеся под днищем, такие как оси, которые частично блокируют датчик (например, радар), чтобы видеть другие объекты позади или кроме прицепа 40. Несмотря на то, что часть примерной радиолокационной волны может отражаться от земной поверхности 80, эти сигналы, тем не менее, могут обнаруживаться одним или несколькими датчиками 110. Следует понимать, что изобретение не должно ограничиваться датчиками конкретных типов или тягачами 10 конкретных типов.
Таким образом, по меньшей мере один датчик 110 может быть размещен практически в любом месте на тягаче 10 при условии, что по-прежнему может охватываться желаемый диапазон 115 обзора (например, под днищем прицепа).
На фиг. 3 показан общий вид комбинации транспортных средств с тягачом 10 и примерным прицепом 40. По меньшей мере один датчик 110 снова присоединен к тягачу 10 и охватывает зону 115, которая проходит не только до задней стороны тягача 10, но и до левой и правой сторон тягача 10 и прицепа 40. Таким образом, появляется возможность идентифицировать объекты, которые расположены сбоку от тягача 10.
Согласно этому варианту выполнения по меньшей мере один датчик 110 имеет подходящую зону 115 обзора. Например, датчик(и) 110 может (могут) представлять собой датчик с широким диапазоном угла обзора, так что могут быть обнаружены объекты, кроме прицепа 40, даже если прицеп 40 шарнирно соединен в отличие от тягача 10. Это может быть достигнуто следующим образом. Установка датчиков обеспечивает непрерывный охват непосредственно прицепа 40. Поэтому блок 120 управления может идентифицировать по меньшей мере один компонент под днищем прицепа 40 и отслеживать свое положение во времени. В результате, угол α сочленения между тягачом 10 и прицепом 40 может быть определен исходя из фактического положения компонентов под днищем прицепа 40. Компонент под днищем может представлять собой ось или опорные стойки прицепа 40, и их положение или изменение положения можно сравнивать с их одним или несколькими базовыми прямыми положениями, которые можно получить из информации отслеживания во времени.
На фиг. 4 показана блок-схема последовательности операций способа обнаружения объекта 60, расположенного в непосредственной близости от прицепа 40, при буксировке транспортным средством 10. Способ содержит этапы, на которых:
- побуждают S110 по меньшей мере один датчик 110 на задней стороне транспортного средства 10 с зоной обзора под прицепом 40 захватывать сигнал обнаружения от объекта 60;
- побуждают S120 блок 120 управления принимать сигнал датчика по меньшей мере от одного датчика 110, при этом сигнал датчика указывает на объект; и
- подтверждают S130 присутствие объекта 60 позади или сбоку от прицепа 40.
Специалист в данной области техники легко поймет, что запрограммированные компьютеры могут выполнять этапы различных вышеописанных способов. Таким образом, этот способ может также представлять собой способ, выполняемый на компьютере. Варианты выполнения также предназначены для охвата запоминающих устройств для хранения программ, например, носителей для хранения данных в цифровой форме, которые являются машино- или компьютерно-читаемыми, и кодирования машиноисполняемых или компьютерно-исполняемых программ инструкций, причем инструкции выполняют некоторые или все действия вышеописанных способов при их исполнении на компьютере или процессоре.
По сравнению с традиционными системами, предпочтительные варианты выполнения изобретения, в частности, относятся к:
Сенсорное устройство для коммерческого транспортного средства или комбинации транспортных средств действует без постоянного наблюдения водителя, обеспечивая предотвращение столкновений и обнаружение окружающей обстановки, при этом датчик 110 размещается на тягаче 10 так, что он может видеть задние и/или боковые объекты прицепа 40 из-под днища прицепа. В этом сенсорном устройстве можно реализовать по меньшей мере один из следующих признаков:
- датчик(и) 110 может (могут) размещаться позади тягача или буксирующего транспортного средства 10;
- датчик(и) 110 может (могут) представлять собой радар, ультразвуковой датчик, лидар, камеру или датчик окружающей обстановки любого другого типа;
- датчик(и) 110 может (могут) выполнять обнаружение объектов 60 позади или помимо прицепа;
- датчик(и) 110 может (могут) выполнять обнаружение самого прицепа или его компонентов;
- компьютерная система может определить угол сочленения между тягачом и прицепом в результате обнаружения прицепа или его компонентов.
Описание и чертежи показывают только принципы изобретения. Таким образом, должно быть понятно, что специалисты в данной области техники смогут разработать различные устройства, которые, хотя и не описаны и не показаны в данном документе в явном виде, воплощают принципы раскрытия и включены в его объем.
Кроме того, несмотря на то что каждый вариант выполнения может рассматриваться в качестве отдельного примера, следует отметить, что в других вариантах выполнения определенные функции могут быть объединены по-разному, то есть конкретный признак, описанный в одном варианте осуществления, может быть также реализован в других вариантах выполнения. Такие комбинации охватываются описанием, если не указано особым образом, что имеется в виду конкретная комбинация.
Перечень ссылочных позиций
10 - транспортное средство
12 - задняя сторона транспортного средства
40 - прицеп
42 - примерный компонент прицепа
60 - объект
80 - земля
110 - по меньшей мере один датчик
115 - зона обзора
120 - блок управления
α - угол сочленения
Изобретение относится к способу и устройству помощи при буксировке прицепа транспортным средством. Сенсорное устройство для обнаружения объекта в окружении прицепа при буксировке транспортным средством содержит по меньшей мере один датчик и блок управления. Датчик установлен на задней стороне транспортного средства с зоной обзора под прицепом и выполнен с возможностью захвата сигнала обнаружения от объекта. Блок управления выполнен с возможностью приема указывающего на объект сигнала от по меньшей мере одного датчика и подтверждения присутствия объекта позади или сбоку от прицепа. Достигается повышение безопасности управления транспортным средством при буксировке прицепа. 3 н. и 9 з.п. ф-лы, 4 ил.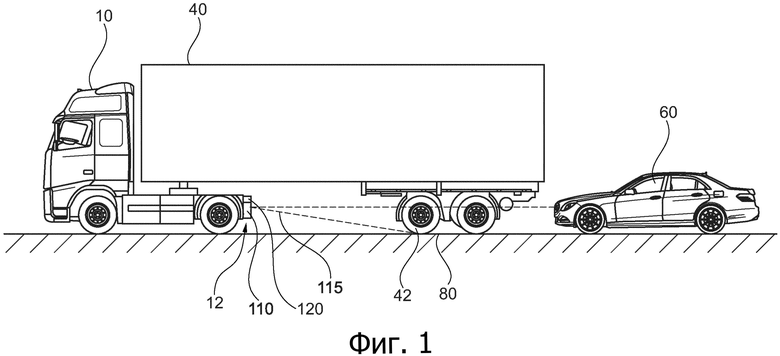
1. Сенсорное устройство для обнаружения объекта (60) в окружении прицепа (40) при буксировке транспортным средством (10), характеризующееся тем, что содержит
по меньшей мере один датчик (110), установленный на задней стороне транспортного средства (10) с зоной обзора (115) под прицепом (40) и выполненный с возможностью захвата сигнала обнаружения от объекта (60); и
блок (120) управления, выполненный с возможностью приема указывающего на объект (60) сигнала от по меньшей мере одного датчика (110) и подтверждения присутствия объекта (60) позади или сбоку от прицепа (40).
2. Сенсорное устройство по п. 1, характеризующееся тем, что блок (120) управления выполнен с возможностью оповещения водителя или системы автоматического управления вождением транспортного средства о присутствии объекта (60) позади или сбоку от прицепа.
3. Сенсорное устройство по любому из пп. 1 или 2, характеризующееся тем, что блок (120) управления дополнительно выполнен с возможностью определения расстояния от объекта (60) до задней стороны (12) транспортного средства (10) или прицепа (40).
4. Сенсорное устройство по любому из пп. 1-3, характеризующееся тем, что блок (120) управления выполнен с возможностью различать сигналы датчиков, принятых от компонентов прицепа, и сигнал обнаружения, принятый от объекта (60), и выполнен с возможностью игнорировать сигналы датчиков, принятые от компонентов прицепа (40), при подтверждении присутствия объекта (60).
5. Сенсорное устройство по любому из пп. 1-4, характеризующееся тем, что блок (120) управления выполнен с возможностью обнаружения непосредственно прицепа (40) или одного из его компонентов (42).
6. Сенсорное устройство по п. 5, характеризующееся тем, что блок (120) управления выполнен с возможностью определения угла (α) сочленения между транспортным средством (10) и прицепом (40) на основании обнаружения прицепа (40) или по меньшей мере одного из его компонентов (42).
7. Сенсорное устройство (100) по любому из пп. 1-6, характеризующееся тем, что блок (120) управления выполнен с возможностью обнаружения объекта (60) на основе сигналов, отраженных от земли (80), или препятствия между объектом (60) и по меньшей мере одним датчиком (110).
8. Сенсорное устройство по любому из пп. 1-7, характеризующееся тем, что по меньшей мере один датчик (110) содержит по меньшей мере один из следующих блоков: радар, ультразвуковой датчик, лидар, камеру или датчик окружающей обстановки любого другого типа.
9. Сенсорное устройство (100) по любому из пп. 1-8, характеризующееся тем, что по меньшей мере один датчик (110) содержит по меньшей мере два блока датчиков для захвата по меньшей мере двух видов с разных ракурсов.
10. Сенсорное устройство (100) по п. 9, характеризующееся тем, что блок (120) управления выполнен с возможностью приема от каждого из по меньшей мере двух датчиков соответствующего сигнала и использования указанных по меньшей мере двух сигналов датчика для по меньшей мере одной из следующих функций: создание стереографической картинки, определение расстояния до объекта (60) и повышение точности обнаружения на основе избыточности сигнала.
11. Транспортное средство, в частности коммерческое транспортное средство (10) или тягач комбинации транспортных средств, характеризующееся тем, что сенсорное устройство выполнено по любому из пп. 1-10.
12. Способ обнаружения объекта (60) в окружении прицепа (40) при буксировке транспортным средством (10), характеризующийся тем, что включает в себя этапы, на которых:
обеспечивают (S110) захват сигнала обнаружения от объекта (60) посредством по меньшей мере одного датчика (110) на задней стороне (12) транспортного средства (10) с зоной обзора (115) под прицепом (40);
обеспечивают (S120) прием блоком (120) управления сигнала от по меньшей мере одного датчика (110), указывающего на объект (60); и
подтверждают (S130) присутствие объекта (60) позади или сбоку от прицепа (40).
| US 8473173 B1, 25.06.2013 | |||
| DE 102006026898 A1, 20.12.2007 | |||
| СИСТЕМА, АССИСТИРУЮЩАЯ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С УКАЗАННОЙ СИСТЕМОЙ И СПОСОБ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2555248C2 |

