Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения пакетных поездов, следующим с интервалом 1000-1500 м.
Уровень техники
Известен способ регулирования движения поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, т.е. между станцией и серединой перегона, номерах установленных маршрутах УМ и прогнозное время приема/отправления поездов, локомотивной ЭВМ ЭВМЛ, которая на основании полученной информации и информации, хранящейся в память о путевом развитии, плане и профиле пути всего участка следования поезда, а также с учетом местонахождения Л, которое определяют с помощью приемника ГЛОНАСС ПГЛ, рассчитывают протяженность свободного участка пути перед поездом, определяет конфигурацию маршрута, оптимальную скорость движения поезда в любой точке пути и передают информацию на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ с помощью двухпроводной линии для питания ЛИ и пошаговой работы линейных распределителей ЛРС, двухпроводной линии контроля ЛК для передачи информации о состоянии РЦ на посты ЭЦ прилегающих к перегону станций; линии ЛП и ЛК укладывают от середины перегона до станции, к ЛП на посту ЭЦ подсоединяют тональный путевой генератор ПГ, а к ЛК - тональный путевой приемник ПП; под воздействием станционной ЭВМ ЭВМС ПГ посылает в ЛП серии импульсов, между которыми следуют интервалы, выполняющие функции сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную; на границах РЦ устанавливают путевые коробки ПК с аппаратурой питающего конца ПКг (генераторный) или приемного конца ПКп, ПКп и ПКг размещают в шахматном порядке; выходы линейных распределителей ЛРС, размещенные в ПК, подсоединяют к электронным ключам ЭК так, чтобы осуществлять циклический контроль состояний РЦ; по ЛК циклически передают информацию на ПП о состоянии РЦ, при этом к ПП посредством путевых трансформаторов ПТ и ЛК подсоединяют приемные концы РЦ, амплитуда сигнала указывает на состояние РЛ; на Л с постов ЭЦ передают информацию о состоянии РЦ находящихся в зоне ЗК и дополнительно о РЦ на участке, длина которого соответствует интервалу попутного следования и который примыкает к середине перегона, что является зоной управления ЗУ, это позволяет уверенно регулировать скорость движения поезда, пересекающего середину перегона; передачу информации с поста ЭЦ на Л осуществляют с помощью приказа телеуправления ТУ с участием радиопередатчика поста ЭЦ РПЭ, прием информация на Л с поста ЭЦ - с помощью локомотивного радиоприемника РПЛ, на все Л, находящиеся в ЗУ, передают одинаковую информацию: о свободных РЦ на перегоне и установленных маршрутах на станции - маршруты приема и отправления, выбор полезной части информации на Л осуществляют с помощью ПГЛ; переключение РПЛ с приема радиосигнала с поста ЭЦ станции отправления на прием сигнала с поста ЭЦ станции приема осуществляют в середине перегона, которую фиксирует ПГЛ-[Патент.2732181 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 14.09.2020 Бюл. №26, МПК B61L 23/16].
Недостатком способа регулирования движения поездов является невысокая пропускная способность участка.
Известен способ регулирования движения поездов, основанный на использовании локомотивной ЭВМ - ЭВМЛ, на вход которой по радиоканалу циклически поступает информация о состоянии перегонных и станционных путевых участков, положении стрелок;
на вход ЭВМЛ также поступает информация о фактической скорости поезда, позиции крана машиниста и позиции локомотивного контроллера, которые приводятся в требуемое положение с помощью блока управления движением поезда;
в памяти ЭВМ хранится информация о параметрах поезда, схематических планах станций, плане и профиле пути, марках стрелочных крестовин, отличающийся тем, что
на постах диспетчерской централизации размещены ЭВМ - ЭВМК, которые контролируют движение поездов диспетчерских кругов, вносят коррективы, определяют время входа и выхода каждого поезда со станций;
на станциях размещены устройства микропроцессорной централизации с дополнительными функциями определения допустимых скоростей в каждой точке пути для каждого из поездов, находящихся в зоне радиосвязи, которая распространяется от оси одной смежной станции до оси другой смежной станции, и передачи приказа о принудительном снижении скорости на поезда, скорость которых приближается к допустимой;
на локомотивах размещены устройства контроля движения поезда, целостности рельсовых нитей, местонахождения локомотива, устройства радиосвязи с двумя ближайшими станциями и хвостовым многофункциональным блоком;
между двумя последними вагонами поезда размещен дополнительный кран тормозной магистрали и хвостовой многофункциональный блок для двухсторонней связи с локомотивом, управления дополнительным краном тормозной магистрали, контроля местонахождения последнего вагона, передачи информации о состоянии рельсовых нитей мобильного контрольного участка между колесными парами двух последних вагонов;
контроль целостности рельсовых нитей мобильного участка осуществляется за счет подключения мобильного генератора к шунтам, ограничивающих контрольный участок, и сравнения текущего тока генератора с интегрированным значением тока, измеренным в течение нескольких секунд;
при превышении интегрированного значения тока над текущим значением вырабатывается сигнал для кратковременного прекращения передачи информации о координате местонахождения хвостового вагона, что позволяет определить место повреждения рельса;
с хвостового многофункционального блока передается информация на локомотив о местонахождении последнего вагона и месте повреждения рельсовой нити, а также о величине давления в тормозной магистрали;
с локомотива на хвостовой многофункциональный блок передается информация для управления дополнительным краном тормозной магистрали для снижения инерционности действия пневматических тормозов;
на локомотиве осуществляется контроль целостности рельсов мобильного контрольного участка между локомотивными секциями, по аналогии с тем, как это осуществляется между двумя последними вагонами поезда;
с локомотива на ближайшие станции передается информация о номере поезда, местонахождении локомотива и последнего вагона, целостности рельсов за хвостом поезда;
со станций на локомотивы по радиосвязи передается информация о состоянии путевых участков, находящихся в зоне контроля станционных устройств, положении маршрутных стрелок, времени входа и выхода поездов со станции;
с учетом принимаемой и хранящейся в памяти ЭВМЛ информации ЭВМЛ рассчитывает допустимую и оптимальную скорости движения и посредством блока управления движением поезда регулирует скорость движения;
в памяти ЭВМЛ хранится информация о координатах изолирующих стыков для того, чтобы можно было отличить повреждение рельсовой нити от изолирующего стыка;
полученная на станциях с локомотивов информация полностью характеризует состояние перегонных путевых участков, а именно их свободность/занятость, целостность/неисправность рельсовых нитей [Патент. 2712364 (РФ). Способ регулирования движения поездов на перегоне без напольных устройств железнодорожной автоматики/ Полевой Ю.И. - Опубл. 28.01.2020 Бюл. №24, МПК B61L 23/04].
Недостатком способ регулирования движения поездов является невысокая пропускная способность участка.
Данные техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено техническое решение, является повышение пропускной способности перегонов за счет снижения интервалов путного следования, снижения инерционности пневматических тормозов.
Способ регулирования движения пакетных поездов, основанный на использовании локомотивной ЭВМ, на вход которой с использованием радиоканала (фиг. 2) циклически поступает информация о состоянии перегонных и станционных путевых участков, установленных маршрутах;
на локомотивную ЭВМ также поступает информация о местонахождении локомотива Л поезда Π (используют для определения расстояния от Л до препятствия и скорости движения поезда), позиции крана машиниста и локомотивного контроллера, которые устанавливают в требуемое положение с помощью устройства регулирования скорости движения УРСД;
в памяти локомотивной ЭВМ хранится информация о параметрах поезда, плане и профиле пути;
на постах диспетчерской централизации размещены ЭВМ, которые контролируют движение поездов диспетчерских кругов, вносят коррективы в управление движением поездов, определяют время входа и выхода поездов со станции;
на Л размещены устройства контроля местонахождения Л -приемник ГЛОНАСС ПГЛ, устройства контроля целостности рельсовых нитей УКЦРН, устройства контроля давления в тормозной магистрали ТМ с помощью электромеханического манометра МН, радиосвязи -радиостанция PC для связи с двумя ближайшими станциями и хвостовым вагоном ХВ поезда;
на ХВ размещены: автоматический регулятор торможения APT для ускорения процесса торможения поезда; электромеханический манометр МН для контроля давления в ТМ в хвостовой части поезда; приемник ГЛОНАСС ПГЛ для контроля местонахождения ХВ; устройство контроля целостности рельсовых нитей РН УКЦРН за хвостом поезда; радиостанция PC для передачи информации на Л о местонахождении ХВ,
целостности РН за хвостом поезда и величине давления в ТМ в хвостовой части поезда;
с Л на ХВ передают управляющий приказ для снижения давления в ТМ хвостовой части поезда, ускоряющий процесса торможения;
на Л УКЦРН осуществляет контроль целостности рельсовых нитей контрольного участка между локомотивными секциями, по аналогии с тем, как это осуществляется в хвосте поезда, движение поезда по поврежденному участку осуществляют в режиме выбега;
с Л на ближайшие станции передается информация о номере поезда, местонахождении Л и ХВ, целостности рельсовых нитей за хвостом поезда;
с учетом принимаемой и хранящейся в памяти локомотивной ЭВМ информации она рассчитывает допустимую и оптимальную скорости движения поезда;
отличающийся тем, что в интервал попутного следования ИПС входят: участок торможения, рассчитанный с учетом влияющих факторов (параметров поезда и пути), и участок пути, который проходит поезд за десять секунд с учетом фактической скорости (это время может быть дополнительно скорректировано);
в вагоне в середине поезда СВ размещены: автоматический регулятор торможения APT для ускорения процесса торможения поезда, манометр МН для контроля давления в ТМ в середине поезда; радиостанция PC для передачи информации на Л о давлении в ТМ в средине поезда;
с Л в СВ передают управляющий приказ на снижение давления в ТМ средней части поезда для ускорения процесса торможения;
локомотивная ЭВМ осуществляет непрерывный контроль давления в ТМ в Л, середине и хвосте поезда, при несоответствии скорости поезда нормативным значениям формируется приказ для ее снижения и подачи оптического, а затем и акустического сигнала для машиниста;
ТМ на Л, середине и хвосте поезда дополнительно оснащена ступенчатым устройством снижения давления - аналог крана машиниста, и аварийным устройством снижения давления - аналог ЭПК, действующий без выдержки времени;
ступенчатое устройство представляет собой два патрубка с внутренним сечением трубы, которое соответствует 25 и 50% от сечения ТМ, которые позволяют осуществить трехступенчатый выхода воздуха в атмосферу (25, 50 и 75% относительно сечения ТМ), каждый из патрубков имеет заслонку, которая перекрывает вход воздуха в атмосферу при подключении к обмотке электромагнита источника электропитания, а при снятии питания опускается вниз под действием собственного веса и позволяет выйти воздуха в атмосферу;
аварийное устройства представляют собой патрубок с внутренним сечением трубы, которое соответствует 100% сечения ТМ и работает аналогично;
ступенчатое и аварийное устройство представляют собой узел, патрубки которого подсоединяют с наконечниками соединительных шлангов через основной патрубок, или к ТМ на Л, шаровой вентиль, перекрывающий пропуск воздуха в атмосферу у хвостового вагона;
мобильные радиостанции, ЭВМ, связи между ними, участвующие в управлении регуляторов APT, дублируют для исключения превышения скорости поезда при его торможении;
существующие ручные средства регулирования скорости движения поезда (локомотивный контроллер и кран машиниста) машинист может использовать в любой момент времени;
зоны радиосвязи между Л и ЭЦ находятся между серединами перегонов прилегающих к станций (фиг. 3).
Краткое описание чертежей
На фиг. 1 представлены посты электрической централизации и фрагменты трех поездов; на фиг. 2 - структурная схема соединения мобильных приборов первого поезда; фиг. 3 - зоны радиосвязи станций отправления и приема; на фиг. 4 - схема расположения клапанов выпуска воздуха из тормозной магистрали (вид сверху); на фиг. 5 - схема расположения клапанов выпуска воздуха из тормозной магистрали с задвижками (вид сбоку); фиг. 6 - кривая скорости при сближении двух поездов; фиг. 7 - кривая скорости при приближении поезда к месту излома рельса.
Описание изобретения
На фиг. 1, 2, 3, 4, 5, 6 и 7 представлены следующие условные обозначения:
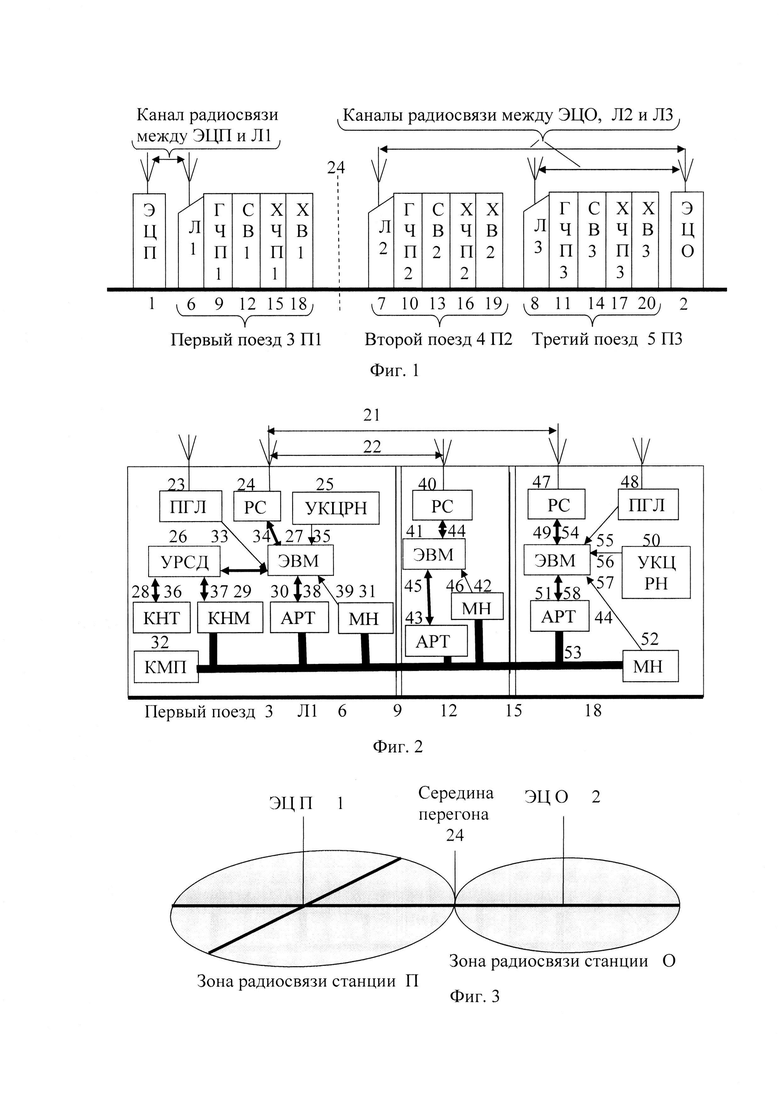
1 и 2 - посты электрической централизации ЭЦ станции приема ЭЦП и станции отправления ЭЦО;
3, 4 и 5 - первый, второй и третий поезд Ш, П2 и ПЗ;
6, 7 и 8 - локомотивы первого, второго и третьего поезда Л1, Л2 и Л3;
9, 10 и 11 - головные части первого, второго и третьего поездов ГЧП1, ГЧП2 и ГЧП3;
12, 13 и 14 - средние вагоны первого, второго и третьего поездов СВ1, СВ2 и СВ3;
15, 16 и 17 - хвостовые части первого, второго и третьего поездов ХЧП1, ХЧП2 и ХЧП3;
18, 19 и 20 -хвостовые вагоны первого, второго и третьего поездов ХВ1, ХВ2 и ХВ3;
21 и 22 - радиоканалы между локомотивной радиостанцией и радиостанциями среднего и хвостового вагонов;
23 - локомотивный приемник ГЛОНАС ПГЛ;
24 - локомотивная радиостанция PC;
25 - локомотивное устройство контроля целостности рельсовых нитей УКЦРН;
26 - устройство регулирования скорости движения УРСД;
27 - локомотивная электронно-вычислительная машина ЭВМ;
28 - локомотивный контроллер КНТ;
29 - локомотивный кран машиниста КНМ;
30 - локомотивный автоматический регулятор торможения APT;
31 - локомотивный электромеханический манометр МН;
32 - локомотивный компрессор КМП;
33, 34, 35, 36, 37, 38 и 39 - внутри локомотивные связи;
40 -радиостанция среднего вагона PC;
41 -электронно-вычислительная машина среднего вагона ЭВМ;
42 - электромеханический манометр среднего вагона МН;
43 -автоматический регулятор торможения среднего вагона APT;
44, 45 и 46 - внутри связи среднего вагона между приборами;
47 - радиостанция хвостового вагона PC;
48 - приемник ГЛОНАС хвостового вагона ПГЛ;
49 - электронно-вычислительная машина хвостового вагона ЭВМ;
50 - устройство контроля целостности рельсовых нитей среднего вагона УКЦРН;
51 - автоматический регулятор торможения хвостового вагона APT;
52 - электромеханический манометр хвостового вагона МН;
53 - тормозная пневматическая магистраль ТМ;
54, 55, 56, 57 и 58 - внутри вагонные связи между приборами хвостового вагона;
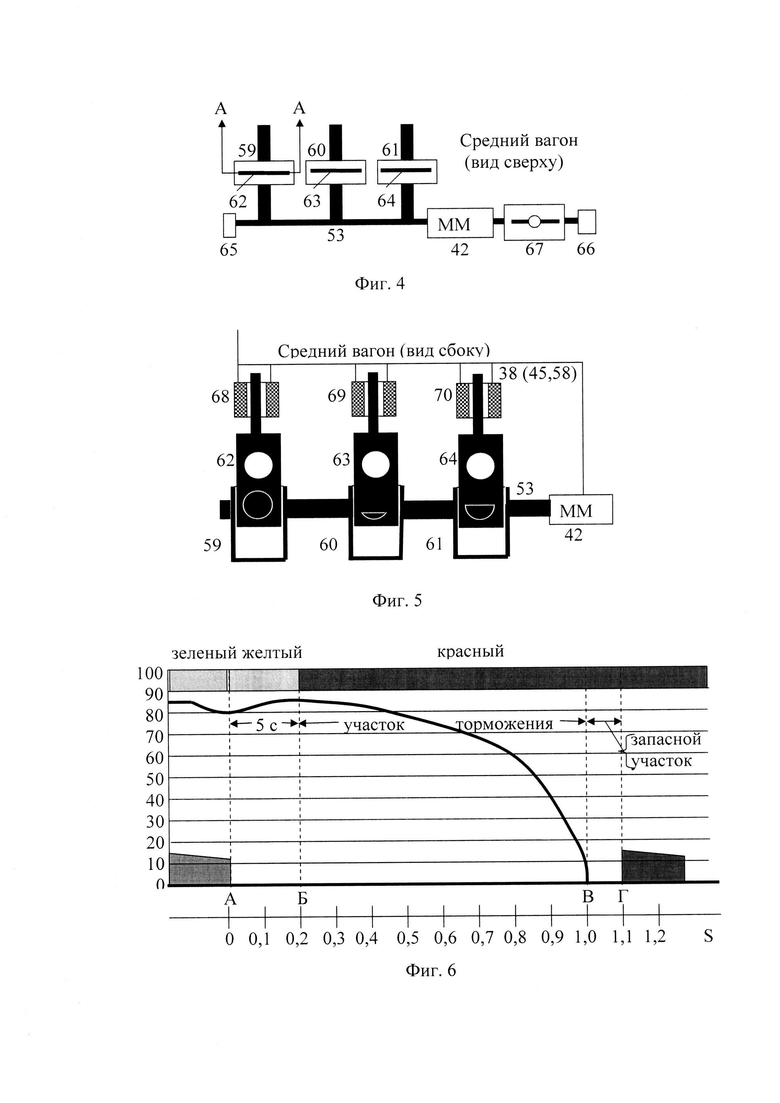
59 - аварийный клапан выпуска воздуха из тормозной магистрали сечением в 100% от сечения трубы ТМ;
60 - первый клапаны для выпуска воздуха из тормозной магистрали сечением в 25% от сечения трубы ТМ;
61 - второй клапаны для выпуска воздуха из тормозной магистрали сечением в 50% от сечения трубы ТМ;
62, 63 и 64 - задвижки аварийного, первого и второго клапанов;
65 и 66 - наконечники на соединительных шлангах между вагонами;
67 - шаровой вентиль для перекрытия тормозной магистрали;
68, 69 и 70 - электромагниты аварийного, первого и второго клапанов;
71 - основной патрубок, к которому крепятся патрубки для клапанов.
На фиг. 1 изображены пост ЭЦП 1 станции приема, пост ЭЦО 2 станции отправления, головная ГЧП и хвостовые ХЧП части поезда 9, 10, 11, 15, 16 и 17, локомотивы Л1 6, Л2 7 и Л3 8, средние и хвостовые вагоны 12, 13, 14, 18, 19 и 20.
На фиг. 2 представлен Л с приборами: 23 - локомотивный приемник ГЛОНАС ПГЛ, 24 - локомотивная радиостанция PC, 25 - локомотивное устройство контроля целостности рельсовых нитей УКЦРН, 26 - устройство регулирования скорости движения УРСД, 27 - локомотивная электронно-вычислительная машина ЭВМ, 28 - локомотивный контроллер КНТ, 29 - локомотивный кран машиниста КНМ, 30 - локомотивный автоматический регулятор торможения APT, 31 - локомотивный электромеханический манометр МН, 32 - локомотивный компрессор КМП, соединенные связями 33, 34, 35, 36, 37, 38 и 39; средний вагон 12 и хвостовой вагон 18 с приборами PC 40, ЭВМ 41, МН 42, APT 43, PC 47, ПГЛ 48, ЭВМ 49, УКЦРН 50, APT 51 и МН 52, соединенные связями 44, 45, 46, 54, 55, 56, 57 и 58, и тормозная магистраль ТМ 53.
На фиг. 3 показаны зоны радиосвязи Л с постами ЭЦ.
На фиг. 4 и 5 изображены: 59 - аварийный клапан выпуска воздуха из тормозной магистрали сечением в 100% от сечения трубы ТМ, 60 - первый клапаны для выпуска воздуха из тормозной магистрали сечением в 25% от сечения трубы ТМ; 61 - второй клапан для выпуска воздуха из тормозной магистрали сечением в 50% от сечения трубы ТМ, 62, 63 и 64 - задвижки аварийного, первого и второго клапанов, 65 и 66 - наконечники на соединительных шлангах между вагонами, 67 - шаровой вентиль для перекрытия тормозной магистрали, 68, 69 и 70 - электромагниты аварийного, первого и второго клапанов.
На фиг. 6 и 7 представлены кривые скорости поезда на табло машиниста при сближении с впереди идущим поездом и при приближении поезда к месту излома рельса.
Ниже описан способ регулирования движения пакетных поездов, основанный на использовании локомотивной ЭВМ 34, на вход которой с использованием радиоканала (фиг. 2) циклически поступает информация о состоянии перегонных и станционных путевых участков, установленных маршрутах.
На локомотивную ЭВМ 34 также поступает информация о местонахождении локомотива Л 6 (7 и 8) поезда Π 3 (4 и 5) (используется для определения расстояния от Л 6 до препятствия и скорости движения поезда), позиции крана машиниста и локомотивного контроллера, которые устанавливают в требуемое положение с помощью устройства регулирования скорости движения УРСД 26.
В памяти локомотивной ЭВМ 34 хранится информация о параметрах поезда, плане и профиле пути.
На постах диспетчерской централизации размещены ЭВМ, которые контролируют движение поездов диспетчерских кругов, вносят коррективы в управление движением, определяют время входа и выхода поездов со станции.
На Л 6 размещены устройства контроля местонахождения Л - приемник ГЛОНАСС ПГЛ 23, устройства контроля целостности рельсовых нитей УКЦРН 25, устройства контроля давления в тормозной магистрали (электромеханический манометр ТМ) МН, радиосвязи - радиостанция PC 24 для связи с постами ЭЦП 1 и ЭЦО 2 двух ближайших станций и хвостовым вагоном ХВ 18 (19 и 20).
На ХВ 18 размещены: автоматический регулятор торможения APT 51 для ускорения процесса торможения поезда; электромеханический манометр МН 52 для контроля давления в ТМ 53 в хвостовой части поезда; приемник ГЛОНАСС ПГЛ 48 для контроля местонахождения ХВ 18; устройство контроля целостности рельсовых нитей УКЦРН 50 за хвостом поезда; радиостанция PC 47 для передачи информации на Л 6 о местонахождении ХВ 18, целостности рельсовых нитей за хвостом поезда и давлении в хвостовой части.
С Л 6 на ХВ 18 передается управляющий приказ на снижение давления в ТМ 53 хвостовой части поезда для ускорения процесса торможения.
На Л 6 УКЦРН 50 осуществляет контроль целостности рельсовых нитей РН контрольного участка между локомотивными секциями, по аналогии с тем, как это происходит в хвосте поезда, движение поезда по поврежденному участку осуществляют в режиме выбега.
С Л 6 на ближайшие станции передают информацию о номере поезда, местонахождении Л 6 и ХВ 18, целостности РН за хвостом поезда; с учетом принимаемой и хранящейся в памяти ЭВМ 41 информации она рассчитывает допустимую и оптимальную скорости движения поезда.
В отличие от прототипа, в интервал попутного следования ИПС входят: участок торможения, рассчитанный с учетом влияющих факторов (параметров поезда и пути), и участок пути, который проходит поезд за десять секунд с учетом фактической скорости (это время может быть дополнительно скорректировано).
В среднем вагоне поезда СВ 12 размещены: автоматический регулятор торможения APT 43 для ускорения процесса торможения поезда, манометр МН 42 для контроля давления в ТМ в середине поезда; радиостанция PC для передачи информации на Л 6 о давлении в ТМ 53 средней части поезда.
С Л 6 на СВ 12 передают управляющий приказ на снижение давления в ТМ 53 средней части поезда для ускорения процесса торможения поезда.
Локомотивная ЭВМ 34 осуществляет непрерывный контроль давления в ТМ 53 в Л 6, середине и хвосте поезда, при несоответствии скорости поезда нормативным значениям формируется приказ для ее снижения и подачи оптического, а затем и акустического сигнала для машиниста.
ТМ 53 в Л 6, середине и хвосте поезда дополнительно оснащена ступенчатым устройством снижения давления - аналог крана машиниста, и аварийным устройством снижения давления - аналог ЭПК, действующий без выдержки времени.
Ступенчатое устройство (фиг. 4 и 5) представляет собой два патрубка с внутренним сечением трубы, которое соответствует 25 и 50% от сечения ТМ 53, которые позволяют осуществить трехступенчатый выхода воздуха в атмосферу (25, 50 и 75% относительно сечения ТМ), каждый из патрубков имеет заслонку, которая перекрывает вход воздуха в атмосферу при подключении к обмотке электромагнита источника электропитания, а при снятии питания опускается вниз под действием собственного веса и позволяет выйти воздуха в атмосферу.
Аварийное устройства представляют собой патрубок с внутренним сечением трубы, которое соответствует 100% сечения ТМ 53 и работает аналогично.
Ступенчатое и аварийное устройство представляют собой узел, патрубки которого подсоединяют с наконечниками соединительных шлангов через основной патрубок, или к ТМ 53 на Л 6, шаровой вентиль 67, перекрывающий пропуск воздуха в атмосферу у хвостового вагона.
Мобильные радиостанции, ЭВМ, связи между ними, участвующие в управлении регуляторов APT, дублируются для исключения превышения скорости поезда при его торможении.
Существующие ручные средства регулирования скорости движения поезда (локомотивный контроллер и кран машиниста) могут использоваться машинистом в любой момент времени.
Зоны радиосвязи между Л 6, ЭЦП 1 и ЭЦО 2 находятся между серединами перегонов прилегающих к станций (фиг. 3).

Изобретение относится к средствам регулирования движения пакетных поездов. Способ основан на использовании интервалов попутного следования ИПС, в который входят: участок торможения, рассчитанный с учетом влияющих факторов, и участок пути, который проходит поезд за десять секунд с учетом фактической скорости. С Л в СВ передают управляющий приказ на снижение давления в ТМ средней части поезда для ускорения процесса торможения; локомотивная ЭВМ осуществляет непрерывный контроль давления в ТМ в Л, середине и хвосте поезда, при несоответствии скорости поезда нормативным значениям формируется приказ для ее снижения и подачи оптического, а затем и акустического сигнала для машиниста. ТМ на Л, середине и хвосте поезда дополнительно оснащают ступенчатым устройством снижения давления и аварийным устройством снижения давления, действующим без выдержки времени. Мобильные радиостанции, ЭВМ, связи между ними, участвующие в управлении автоматических регуляторов торможения, дублируют для исключения превышения скорости поезда при его торможении. Достигается повышение пропускной способности перегонов. 7 ил.
Способ регулирования движения пакетных поездов, основанный на использовании локомотивной ЭВМ, на вход которой с использованием радиоканала циклически отправляют информацию о состоянии перегонных и станционных путевых участков, установленных маршрутах; на локомотивную ЭВМ также отправляют информацию о местонахождении локомотива Л поезда П, позиции крана машиниста и локомотивного контроллера, которые устанавливают в требуемое положение с помощью устройства регулирования скорости движения УРСД; в памяти локомотивной ЭВМ хранят информацию о параметрах поезда, плане и профиле пути; на постах диспетчерской централизации размещают ЭВМ, с помощью которых контролируют движение поездов диспетчерских кругов, вносят коррективы в управление движением поездов, определяют время входа и выхода поездов со станции; на Л размещают устройства контроля местонахождения Л - приемник ГЛОНАСС ПГЛ, устройства контроля целостности рельсовых нитей УКЦРН, устройства контроля давления в тормозной магистрали ТМ с помощью электромеханического манометра МН, радиосвязь - радиостанцию PC для связи с двумя ближайшими станциями и хвостовым вагоном ХВ поезда; на ХВ размещают: автоматический регулятор торможения APT для ускорения процесса торможения поезда; электромеханический манометр МН для контроля давления в ТМ в хвостовой части поезда; приемник ГЛОНАСС ПГЛ для контроля местонахождения ХВ; устройство контроля целостности рельсовых нитей РН УКЦРН за хвостом поезда; радиостанция PC для передачи информации на Л о местонахождении ХВ, целостности РН за хвостом поезда и величине давления в ТМ в хвостовой части поезда; с Л на ХВ передают управляющий приказ для снижения давления в ТМ хвостовой части поезда, ускоряющий процесс торможения; на Л УКЦРН осуществляет контроль целостности рельсовых нитей контрольного участка между локомотивными секциями, как и в хвосте поезда, движение поезда по поврежденному участку осуществляют в режиме выбега; с Л на ближайшие станции передают информацию о номере поезда, местонахождении Л и ХВ, целостности рельсовых нитей за хвостом поезда; с учетом принимаемой и хранящейся в памяти локомотивной ЭВМ информации рассчитывают допустимую и оптимальную скорости движения поезда; отличающийся тем, что в интервал попутного следования ИПС включают: участок торможения, рассчитанный с учетом влияющих факторов, и участок пути, который проходит поезд за десять секунд с учетом фактической скорости; в вагоне в середине поезда СВ размещают: автоматический регулятор торможения APT для ускорения процесса торможения поезда, манометр МН для контроля давления в ТМ в середине поезда; радиостанцию PC для передачи информации на Л о давлении в ТМ в средине поезда; с Л в СВ передают управляющий приказ на снижение давления в ТМ средней части поезда для ускорения процесса торможения; локомотивная ЭВМ осуществляет непрерывный контроль давления в ТМ в Л, середине и хвосте поезда, при несоответствии скорости поезда нормативным значениям формируется приказ для ее снижения и подачи оптического, а затем и акустического сигнала для машиниста; тормозную магистраль на Л, в середине и хвосте поезда дополнительно оснащают ступенчатым устройством снижения давления и аварийным устройством снижения давления, действующим без выдержки времени; мобильные радиостанции, ЭВМ, связи между ними, участвующие в управлении регуляторов APT, дублируют для исключения превышения скорости поезда при его торможении; предоставляют машинисту возможность в любой момент времени использовать ручные средства регулирования скорости движения поезда; зоны радиосвязи между Л и ЭЦ располагают между серединами перегонов, прилегающих к станциям.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2683696C1 |
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| Устройство для управления торможением поезда | 1988 |
|
SU1661019A1 |
| Сорокин, В.Е | |||
| Синтез модели работы оптимальной системы интервального регулирования движением поездов на базе цифрового радиоканала / В.Е | |||
| Сорокин, М.Н.Чепцов // Сборник научных трудов Донецкого института железнодорожного транспорта | |||
| Донецк, | |||

