Область техники
Настоящее описание изобретения относится к узлу для системы управления, например, к узлу для системы управления, содержащей трехосную рукоятку управления.
Уровень техники
В транспортном средстве узел для системы управления устанавливается для управления по меньшей мере некоторыми из движений или динамикой транспортного средства. Например, в транспортном средстве, таком как самолет, вертолет или морское судно, может быть установлена рукоятка управления для управления динамикой, такой как тангаж и крен. Как правило, для управления другими видами динамики могут использоваться другие функции управления. Например, педали и/или рычаги могут управлять рулем и/или рысканием транспортного средства.
Некоторые системы включают управление множеством видов динамики в одной системе. Например, трехосная рукоятка управления может быть выполнена с возможностью управления тангажом, креном и рысканием транспортного средства путем вращения рукоятки управления вокруг трех осей. Однако включение все большего числа возможностей управления в единую систему требует увеличения сложности системы как с точки зрения механической, так и конструктивной сложности, а также с точки зрения удобства использования, например, для пилота.
Крайне важно, чтобы система управления была достаточно интуитивно понятной и/или простой в использовании, чтобы транспортным средством можно было безопасно управлять. Движения органов управления также могут широко имитировать те движения, которые транспортное средство совершает в результате их выполнения. Например, трехосная рукоятка управления может управлять вращением самолета на основе ее перемещения влево и вправо относительно оси вдоль направления вперед; она может управлять тангажем, основанным на ее движении вперед и назад относительно оси, перпендикулярной направлению вперед; и она может управлять рысканием на основе вращения вокруг оси, определяемой направлением выступа самой рукоятки.
Считается, что такие обычные системы удовлетворительно выполняют свое предназначение. Тем не менее существует потребность в разработке усовершенствованных узлов для систем управления. Настоящее описание изобретения представляет собой решение для этой потребности.
Сущность изобретения
Согласно одному варианту осуществления изобретения предлагается узел, содержащий: первый вал; второй вал; соединение, соединяющее первый и второй валы; карданный механизм, в который вложено соединение, причем источник вращения соединения совпадает с источником вращения карданного механизма. Соединение может вращаться внутри карданного механизма. То есть, соединение может вращаться относительно карданного механизма вокруг продольного направления соединения (например, соответствующего оси вращения первого вала) для передачи крутящего момента от одного конца соединения к другому, независимо от карданного механизма (т.е. без вращения карданного механизма).
В еще одном варианте осуществления изобретения, указанного выше, карданный механизм может обеспечивать оси вращения для первого вала, и соединение может обеспечивать оси вращения для первого вала; причем оси вращения, обеспечиваемые карданным механизмом, и оси вращения, обеспечиваемые соединением, пересекаются при совпадении источников вращения.
В еще одном варианте осуществления изобретения, указанного выше, карданный механизм может содержать первый карданный шарнир, расположенный внутри второго карданного шарнира и соединенный с возможностью вращения со вторым карданным шарниром.
В еще одном варианте осуществления изобретения, указанного выше, второй карданный шарнир может быть расположен внутри рамы и соединен с возможностью вращения с рамой.
В еще одном варианте осуществления изобретения, указанного выше, первый вал может вращаться вокруг каждой из первой оси, второй оси и третьей оси; и вращение первого вала вокруг первой оси может привести к тому, что первый карданный шарнир будет вращаться вокруг первой оси; вращение первого вала вокруг второй оси может привести к тому, что первый и второй карданные шарниры будут вращаться вокруг второй оси, а вращение первого вала вокруг третьей оси может привести к вращению второго вала относительно его длины.
В еще одном варианте осуществления изобретения, указанного выше, вращение первого карданного шарнира вокруг первой оси может управлять первым параметром управления, вращение второго карданного шарнира вокруг второй оси может управлять вторым параметром управления, а вращение второго вала относительно его длины может управлять третьим параметром управления.
В еще одном варианте осуществления изобретения, указанного выше, первая, вторая и третья оси могут пересекаться друг с другом внутри соединения.
В еще одном варианте осуществления изобретения, указанного выше, третья ось может быть расположена вдоль длины первого вала.
В еще одном варианте осуществления изобретения, указанного выше, узел может дополнительно содержать рукоятку, установленную на первом валу.
В еще одном варианте осуществления изобретения, указанного выше, узел может представлять собой рукоятку управления для системы управления. Она может служить для управления самолетом.
В еще одном варианте осуществления изобретения, указанного выше, перемещение рукоятки может быть выполнено так, чтобы интуитивно соответствовать параметрам управления, управляемым перемещением. Например, перемещение рукоятки в переднем и заднем направлениях может управлять тангажем, перемещение рукоятки влево и вправо может управлять креном, а вращение рукоятки относительно ее длины может управлять рысканием.
В еще одном варианте осуществления изобретения, указанного выше, соединение может представлять собой универсальное соединение. Соединение может содержать пару вилочных шарниров, соединенных поперечным валом.
В соответствии с другим вариантом осуществления раскрываемого изобретения предлагается способ управления системой управления, содержащей узел в соответствии с любым из вышеприведенных вариантов осуществления, причем способ включает в себя вращение первого вала относительно источника вращения соединения, вложенного в карданный механизм, во время которого источник вращения соединения совпадает с источником вращения карданного механизма.
В еще одном варианте осуществления изобретения, указанного выше, способ может включать в себя вращение первого вала и первого карданного шарнира вокруг первой оси для управления первым параметром управления самолета; вращение первого вала, первого карданного шарнира и второго карданного шарнира вокруг второй оси для управления вторым параметром управления самолетом; и вращение первого вала вокруг третьей оси для управления третьим параметром управления самолетом. Первый, второй и третий параметры управления могут соответствовать тангажу, крену и рысканию самолета, соответственно. В альтернативном варианте осуществления, первый, второй и третий параметры управления могут соответствовать крену, тангажу и рысканию самолета, соответственно. Первый, второй и третий параметры управления могут соответствовать любым подходящим элементам управления.
Соединение может вращаться внутри карданного механизма. То есть соединение может вращаться относительно карданного механизма и независимо от него. Например, когда первый вал вращается только вокруг третьей оси, соединение может вращаться без вращения карданного механизма. В любом случае, карданный механизм и соединение могут обеспечивать оси вращения для первого вала, причем оси пересекаются друг с другом в точке, находящейся внутри соединения независимо от вращения соединения в карданном механизме.
Соединение может быть полностью размещено в карданном механизме и может быть полностью размещено в первом карданном шарнире. Соединение может быть размещено частично или в значительной степени внутри карданного механизма или первого карданного шарнира. Первый карданный шарнир может быть устроен так, чтобы вмещать соединение, или в значительной степени или частично окружать его.
Первый карданный шарнир может быть устроен так, чтобы первый вал проходил в карданный механизм. Первый карданный шарнир может быть устроен так, чтобы обеспечивать возможность вращения первого вала относительно него, а также может быть устроен так, чтобы обеспечивать возможность вращения первого вала относительно длины первого вала относительно первого карданного шарнира. То есть первый вал может вращаться только вокруг своей собственной длины относительно первого карданного шарнира. Первый карданный шарнир может быть устроен так, чтобы обеспечивать возможность вращения первого вала во всех случаях, за исключением ситуаций, когда первый вал вращается вокруг третьей оси. Например, положение первого карданного шарнира может быть зафиксировано относительно положения первого вала (хотя вращение соединения внутри первого карданного шарнира может быть еще возможно).
Карданный механизм может быть устроен так, чтобы обеспечивать возможность перемещения первого вала в любое угловое положение в пределах заданного телесного угла, например, в пределах диапазона перемещения, определяемого пределами вращения первого и второго карданных шарниров. Первый вал может быть устроен так, чтобы обеспечивать возможность перемещения внутри сферического сектора или конуса или возможность перемещения внутри геодезической линии эллипсоида. Соединение может обеспечивать первому валу возможность вращения относительно своей длины (например, вокруг третьей оси), чтобы занять любую вращательную ориентацию, в дополнение к движению, разрешенному карданным механизмом.
Второй вал может быть устроен таким образом, чтобы он вращался только относительно своей длины. Второй вал может передавать только вращение первого вала вокруг третьей оси. Первый конец второго вала может быть соединен с первым валом в соединении, а второй конец второго вала может быть соединен с подшипником.
Первая, вторая и третья оси пересекаются друг с другом в точке, расположенной внутри соединения под рукояткой в рабочей ориентации. Соединение может включать в себя четвертую и пятую оси, которые позволяют поворачивать угол первого вала в любом направлении относительно угла второго вала. Четвертая и пятая оси могут быть коллинеарными со второй и третьей осями (определяемыми карданным механизмом), например, когда первый вал находится в нейтральном положении. Четвертая и пятая оси могут быть не коллинеарными со второй и третьей осями и могут проходить через плоскость, ортогональную третьей оси.
Первая ось и вторая ось снабжены карданным механизмом. Первая ось может быть снабжена первым карданным шарниром, а вторая ось может быть снабжена вторым карданным шарниром. Третья, четвертая и пятая оси снабжены соединением. Первая и вторая оси пересекаются в источнике вращения карданного механизма. Третья, четвертая и пятая оси пересекаются в источнике вращения соединения. Источник вращения карданного механизма совпадает с источником вращения соединения, т. е. находится в том же месте.
Соединение может представлять собой соединение любого типа между первым и вторым валами, которое допускает любую ориентацию между ними. Это может быть, например, соединение постоянной скорости (CV), такое как гомокинетическое соединение, соединение Рцеппа (Rzeppa), соединение Вайс (Weiss), соединение Томпсон (Thompson), соединение Тракта (Tracta) и/или соединение Малпеззи (Malpezzi).
Соединение не обязательно должно быть соединением постоянной скорости из-за ограниченного требуемого диапазона вращения, который может составлять всего 120 градусов. Более обычное универсальное соединение, состоящее из пары вилок, соединенных поперечным валом, является хорошим решением благодаря своей простоте, надежности и работоспособности. Другие гибкие соединительные устройства также могут быть подходящими для передачи крутящего момента от первого вала ко второму валу независимо от карданного механизма.
Узел может содержать датчики для измерения и контроля вращения первого карданного шарнира, второго карданного шарнира и второго вала. Датчики могут измерять и контролировать вращение относительно рамы. Датчики могут быть выполнены с возможностью управления параметрами управления на основе измерения вращения первого карданного шарнира, второго карданного шарнира и второго вала.
Может быть предусмотрен узел для управления работой руля на самолете. Этот узел может быть частью модуля рукоятки управления для самолета. Настоящее описание изобретения распространяется на самолет, оснащенный модулем рукоятки управления, который содержит узел в соответствии с одним из вышеописанных вариантов осуществления изобретения. В частности, такой самолет может использовать модуль рукоятки управления для управления работой его руля. Самолет может быть устроен так, чтобы пилот мог управлять работой руля самолета, используя свои руки, а не ноги. Педали для пилота могут отсутствовать или использоваться для других функций самолета.
Настоящее описание изобретения может также распространяться на способ управления рулем самолета, включающий в себя вращение первого вала узла или модуля в соответствии с любым из вышеописанных вариантов осуществления изобретения относительно источника вращения соединения, вложенного в карданный механизм, при котором источник вращения соединения совпадает с источником вращения карданного механизма.
Эти и другие особенности систем рассматриваемого изобретения будут более очевидными для специалистов в данной области техники из следующего подробного описания, приведенного вместе с графическими материалами.
Фигуры
Чтобы специалисты в данной области техники, к которой относится настоящее изобретение, легко понимали, как создавать и использовать устройства описываемого изобретения без необоснованных экспериментов, их варианты осуществления будут подробно описаны ниже в качестве примеров со ссылкой на некоторые фигуры, в которых:
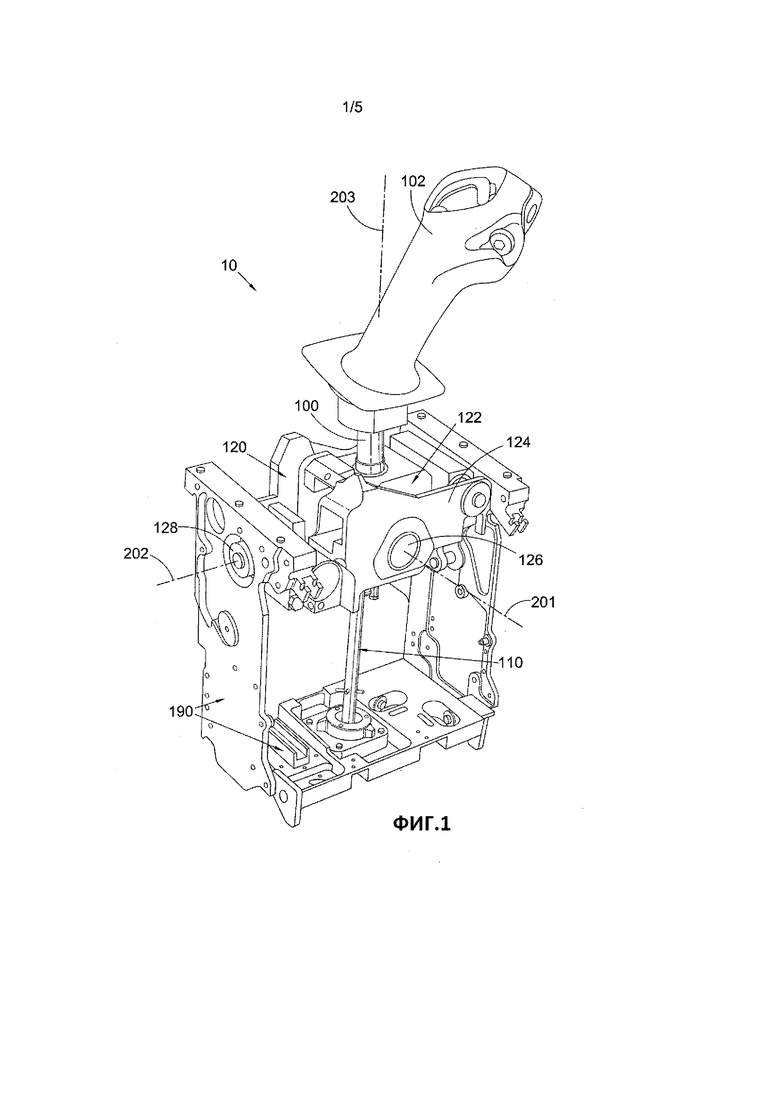
на фиг. 1 показана иллюстративная трехосная рукоятка управления для самолета;
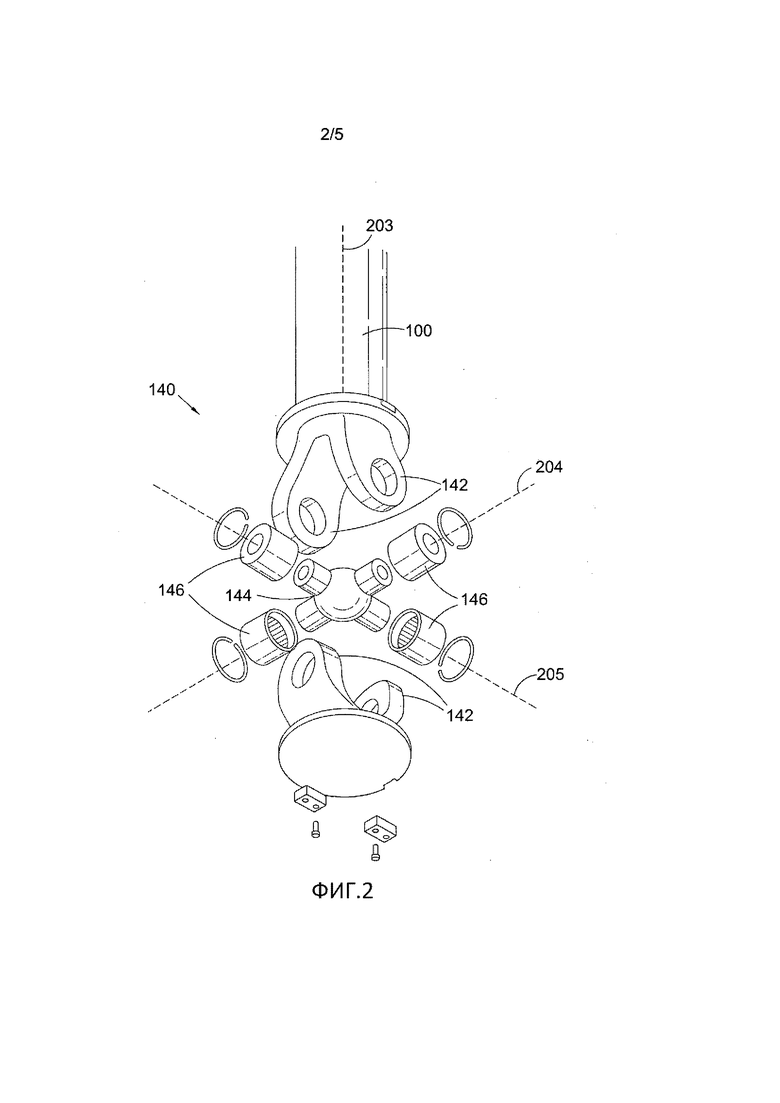
на фиг. 2 показано иллюстративное соединение для использования в модуле, показанном на фиг. 1;
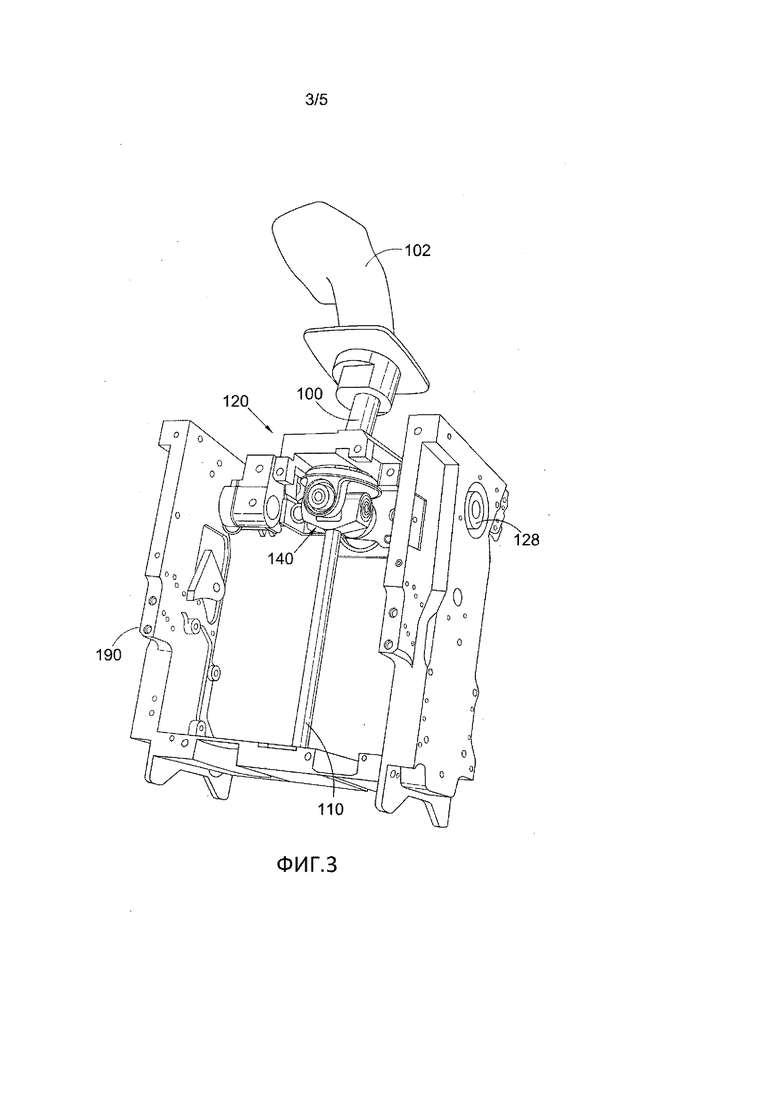
на фиг. 3 показан вид в разрезе иллюстративного модуля рукоятки управления для самолета;
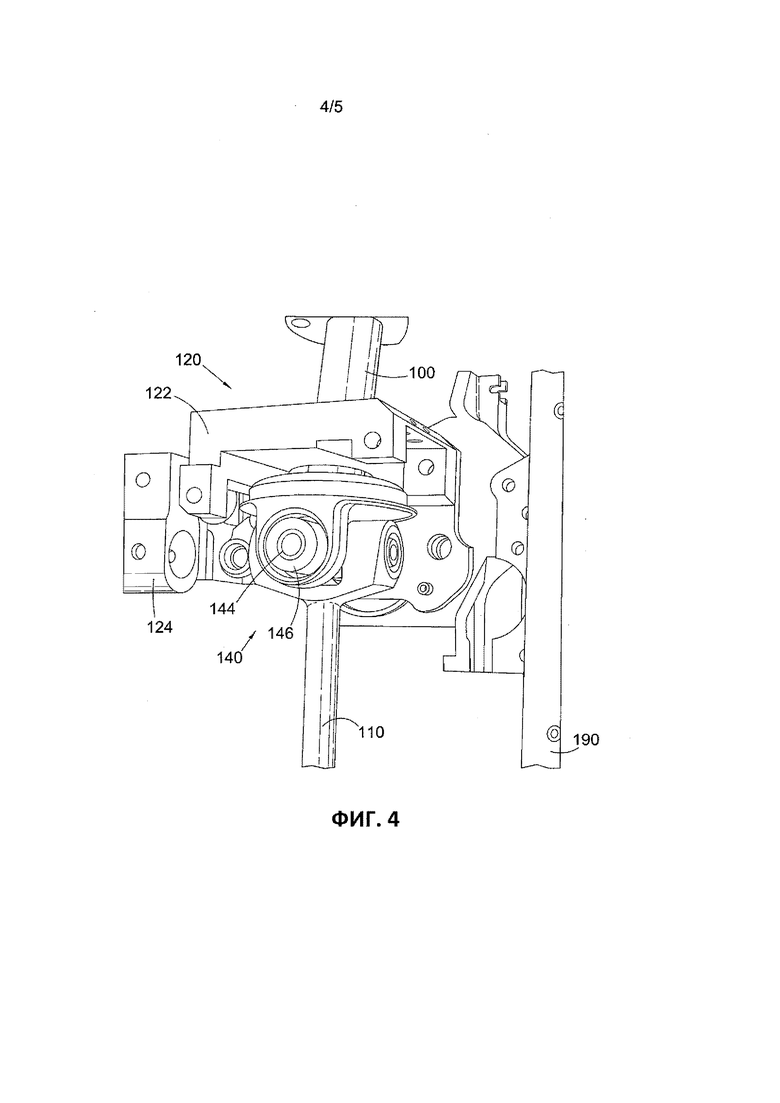
на фиг. 4 показано иллюстративное соединение в карданном механизме рукоятки управления; и
на фиг. 5А-5D показана иллюстративная компоновка осей вращения соединения и карданного механизма рукоятки управления.
Подробное описание изобретения
Здесь будут приведены ссылки на графические материалы, на которых одинаковые номера ссылок идентифицируют одинаковые конструктивные особенности или аспекты данного изобретения. В целях пояснения и иллюстрации, а не ограничения, иллюстративный вид варианта осуществления модуля рукоятки управления в соответствии с описанием изобретения показан на фиг. 1 и обозначен в целом ссылочным символом 10. Другие аспекты данного изобретения показаны на фиг. 2-4. Узел, описанный здесь, может использоваться для управления динамикой и/или движениями системы. Например, он может управлять параметрами управления полетом самолетов, параметрами движения судов (например, подводных лодок, судов на подводных крыльях, на воздушной подушке и т. д.), параметрами движения вездеходов, автоцистерн, беспилотных летательных аппаратов, кресел-каталок, дистанционно управляемых систем и/или учебных тренажеров.
На фиг. 1 показан модуль 10 рукоятки управления, содержащий первый вал 100, второй вал 110 и карданный механизм 120, закрепленный в раме 190. Модуль содержит узел, установленный для поддержки работы рукоятки управления. Соединение 140 может размещаться внутри карданного механизма. В изображенном модуле 10 соединение 140 представляет собой универсальное соединение. Рукоятка 102 закреплена или установлена на первом валу 100 и может использоваться для управления его положением и ориентацией.
Карданный механизм содержит первый карданный шарнир 122, второй карданный шарнир 124 и определяет первую ось 201 и вторую ось 202, вокруг которой карданный механизм позволяет поворачивать рукоятку 102 и первый вал 100. Первый карданный шарнир 122 вращается вокруг первой оси 201 в ответ на вращение первого вала 100 вокруг первой оси 201. Первый карданный шарнир 122 и второй карданный шарнир 124 вращаются вокруг второй оси 202 в ответ на вращение первого вала 100 вокруг второй оси 202. Поэтому первая ось 201 также вращается вокруг второй оси 202 в ответ на вращение второго карданного шарнира 124, вращающегося вокруг второй оси 202.
Первый карданный шарнир 122 закреплен для вращения вокруг первой оси 201 во втором карданном шарнире 124 с помощью первой пары цапф 126. Второй карданный шарнир 124 закреплен для вращения вокруг второй оси 202 внутри рамы 190 с помощью второй пары цапф 128. Поэтому первый вал 100 может вращаться вокруг одного конца, чтобы занять какое-либо положение в пределах конуса, определяемого пределами перемещения первого и второго карданных шарниров 122, 124.
Рама 190 может представлять собой стандартную конструкцию, которая подходит для использования на самолетах и может иметь стандартный или заданный размер, форму, расположение и т.д. Таким образом, модуль рукоятки управления может быть совместим с существующими узлами управления системами и/или размещен в имеющемся пространстве таких узлов. Кабины самолетов обычно содержат много компонентов, и поэтому пространство внутри кабин должно тщательно учитываться. Узел, описанный здесь, может иметь размеры и/или выполнен с возможностью размещения в существующем месте для узла для системы управления. Он также позволяет избежать необходимости в других системах управления, таких как педали или рычажные механизмы для управления такими параметрами, как рыскание, освобождая пространство внутри кабины и снижая вес систем управления.
Рама 190 может содержать другие компоненты (не показаны), которые используются в самолете и которые могут обеспечивать некоторые функциональные возможности модуля. Они могут включать в себя датчики для измерения вращения первого карданного шарнира 122, второго карданного шарнира 124 и второго вала 110. Они могут включать в себя компоненты, связанные с управлением системой, и/или могут включать в себя компоненты, не используемые для управления системой.
На фиг. 2 показано соединение 140 (также известное как универсальное соединение, U-образное соединение, карданное соединение, соединение Харди-Спайсера (Hardy-Spicer) или соединение Гука (Hooke)). Соединение выполнено на первом конце первого вала 100 и первом конце второго вала 110 и соединяет первый и второй валы 100, 110. Соединение содержит вилки 142, выполненные с возможностью соединения с вилками 142 противоположного вала. Поперечный вал 144 заключен в вилки и соединен с ними, обеспечивая шарнирное соединение первого и второго валов 100, 110 друг с другом. Могут быть предусмотрены втулки 146 между ножками поперечного вала 144 и вилками 142 для облегчения свободного движения соединения 140.
Как отмечено выше, соединение 140 может представлять собой соединение любого типа между первым и вторым валом, которое допускает любую ориентацию между ними, такое как гомокинетическое соединение постоянной скорости (CV).
Кроме вращения первого вала 100 вокруг первой 201 и второй осей 202 (в соответствии с положением карданного механизма 120), соединение 140 допускает вращение первого вала 100 вокруг третьей оси 203, направленной вдоль длины первого вала 100. То есть рукоятка 102 и первый вал 100 могут вращаться вокруг третьей оси 203 в дополнение к вращению на одном конце вокруг первой и второй осей 201, 202, даже когда рукоятка 102 и первый вал 100 отклоняются от нейтрального вертикального положения.
Вращение рукоятки 102 и первого вала 100 вокруг третьей оси 203 передается на второй вал 110. Второй вал 110 расположен таким образом, чтобы он мог вращаться только относительно своей длины. Поэтому любое вращение второго вала 110 является следствием вращения первого вала 100. Это вращение может выполняться независимо от любого движения на карданном механизме 120.
Соединение 140 обеспечивает две дополнительные оси вращения, четвертую ось 204 и пятую ось 205, определяемые ножками поперечного вала 144. Третья ось 203, четвертая ось 204 и пятая ось 205 перпендикулярны друг другу. Четвертая 204 и пятая 205 оси расположены в плоскости, перпендикулярной третьей оси 203, и перемещаются в этой плоскости, когда первый вал 100 вращается вокруг третьей оси 203.
В зависимости от ориентации вращения первого вала 100 относительно третьей оси 203, четвертая 204 и пятая 205 оси могут быть или не быть коллинеарными с первой и второй осями 201, 202 в соответствии с положением карданного механизма 120.
Следовательно, размещение соединения 140 внутри карданного механизма 120 позволяет вращаться первому валу 100 вокруг третьей оси 203, а также отклоняться относительно первой и/или второй оси 201, 202 в соответствии с положением карданного механизма 120.
Как можно видеть на фиг. 3, где показана только часть карданного механизма 120, соединение 140 вложено в карданный механизм 120 и, следовательно, соединяет первый и второй валы 100, 110 для вращения, при этом обеспечивая возможность углового перемещения в любом направлении между ними. Поэтому соединение 140, работающее вместе с карданным механизмом 120, позволяет рукоятке 102 и первому валу 100 располагаться под любым углом относительно вертикали в пределах заданного телесного угла, который может быть круглым или эксцентрическим. Кроме того, соединение 140 допускает вращение рукоятки 102 и первого вала 100 вокруг третьей оси 203, причем это вращение передается на второй вал 110 независимо от положения рукоятки 102.
Ориентация третьей оси 203 изменяется в зависимости от вращения первого вала 100 на одном конце вокруг первой и второй осей 201 и 202, т. е. третья ось 203 поворачивается вокруг соединения 140 относительно второго вала 110. В отличие от этого, ориентация второй оси 202 фиксируется карданным механизмом, закрепленным в раме 190. Первая ось 201 может вращаться вокруг второй оси 202 в плоскости, перпендикулярной к ней.
Когда рукоятка 102 находится в нейтральном вертикальном положении (например, как показано на фиг. 1), три оси 201, 202, 203 являются ортогональными трехмерными декартовыми осями. Однако в то время как первая и вторая ось остаются ортогональными друг другу в силу ограничения движения карданного механизма 120 в неподвижной раме 190, ориентация третьей оси 203 изменяется в зависимости от отклонения первого вала 100 относительно первой и второй осей 201 и 202. Например, если рукоятка 102 перемещается в переднее положение, третья ось 203 не будет перпендикулярна второй оси 202 (хотя она все еще может быть перпендикулярна первой оси 201).
На фиг. 4 показано увеличенное изображение соединения 140, вложенного в карданный механизм 120. Первый карданный шарнир 122 выполнен с возможностью прохождения первого вала 100 через его верх, так что соединение 140 является вложенным в карданный механизм 120, образованный первым карданным шарниром 122 и вторым карданным шарниром 124. Первый вал 100 может быть выполнен одной деталью или сформирован из соединенных сегментов. На изображенной компоновке оси вращения соединения 140, отличные от третьей оси 203 - четвертая ось 204 и пятая ось 205, описанные выше, определяемые ножками поперечного вала 144 в плоскости, перпендикулярной третьей оси 203 - коллинеарны с первой и второй осью 201, 202 карданного механизма, благодаря чему облегчается вращение первого вала 100 вокруг этих первой и второй осей 201, 202. В альтернативном варианте осуществления, четвертая 204 и пятая 205 ось могут не быть коллинеарными с первой и второй осью 201, 202.
В любом случае три оси 201, 202, 203 пересекаются в одной точке в соединении 140. Когда рукоятка находится в нейтральном вертикальном положении, три оси 201, 202, 203 соответствуют трехмерным декартовым осям, а точка пересечения соответствует началу координат. Однако, независимо от ориентации третьей оси 203 относительно первой и второй осей 201, 202, три оси все еще пересекаются в одной точке внутри соединения 140. Как следствие, вращение первого вала 100 и рукоятки 102 происходит вокруг одной и той же точки, что обеспечивает простое и интуитивно понятное использование устройства для пилота.
Альтернативный способ описания этой компоновки состоит в том, что источник вращения соединения 140 совпадает с источником вращения карданного механизма 120.
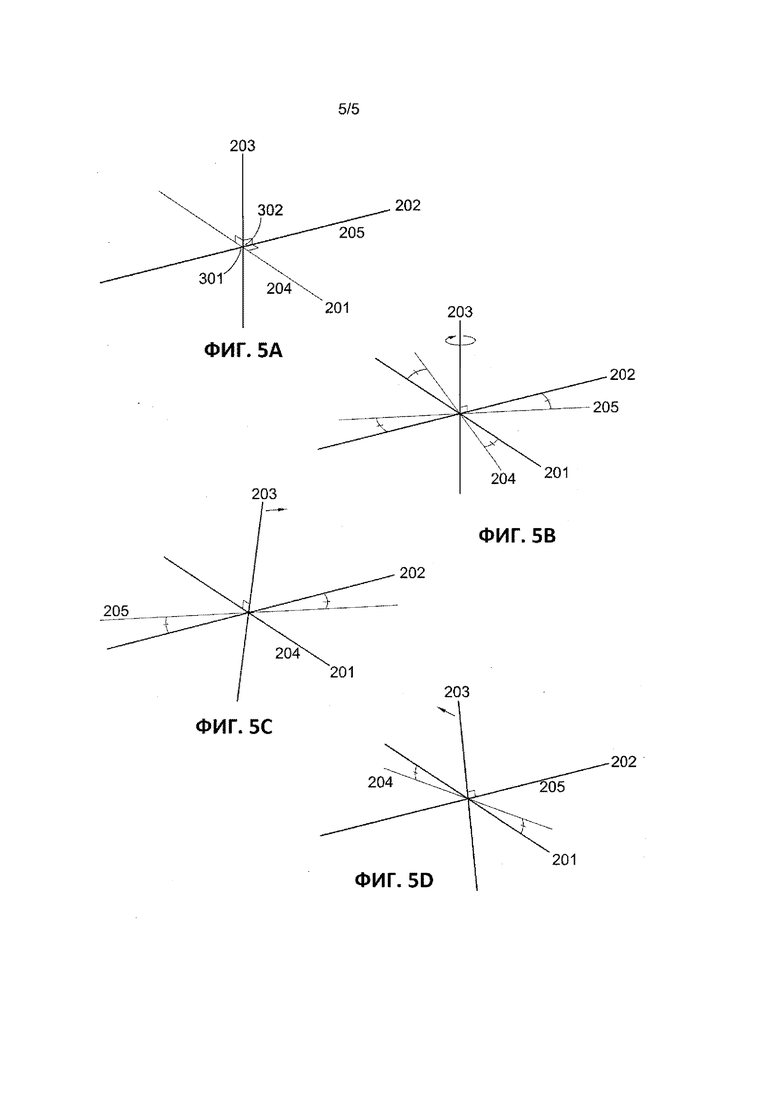
На фиг. 5А-5D показан ряд иллюстративных расположений осей. Первая и вторая оси 201, 202 определены карданным механизмом 120. Третья, четвертая и пятая оси 203, 204, 205 определены соединением. Первая и вторая оси 201, 202 перпендикулярны друг другу во всех компоновках. Четвертая и пятая оси 204, 205 перпендикулярны друг другу во всех компоновках. Первый источник вращения 301 определяется пересечением первой и второй осей 201, 202. Второй источник вращения 302 определяется пересечением третьей, четвертой и пятой осей 203, 204, 205.
На фиг. 5А первый вал 100 находится в нейтральном вертикальном положении, а третья ось 203 перпендикулярна первой оси 201 и второй оси 202. Четвертая ось 204 коллинеарна первой оси 201, а пятая ось 205 коллинеарна второй оси 202. На фиг. 5В первый вал 100 повернут вокруг третьей оси 203, а четвертая ось 204 и пятая ось 205 повернуты в плоскости (определяемой первой и второй осями 201, 202) на угол α. На фиг. 5С первый вал 100 повернут вокруг первой оси 201, так что пятая ось 205 повернута на угол β в плоскости, определяемой второй и третьей осями 202, 203. На фиг. 5D первый вал вращается вокруг второй оси 202, так что четвертая ось поворачивается на угол γ в плоскости, определяемой первой и третьей осями 201, 203.
Конечно, возможна комбинация вращений вокруг первой, второй и третьей осей 201, 202, 203. Однако вращение первого вала 100 ограничено перемещениями первой и второй осей 201, 202, которые ограничены установкой карданного механизма 120 в раме 190. Во всех случаях первый источник вращения 301 и второй источник вращения 302 совпадают, т. е. расположены в одной и той же точке пространства.
Поэтому очевидно, что рукоятка 102 управляет положениями и/или ориентациями вращения первого карданного шарнира 122, второго карданного шарнира 124 и второго вала 110 с помощью перемещения первого вала 100. Вращение первого карданного шарнира 122 используется для управления первым параметром управления полетом, вращение второго карданного шарнира 124 используется для управления вторым параметром управления полетом, а вращение второго вала 110 используется для управления третьим параметром управления полетом. Датчики (не показаны) могут быть предусмотрены отдельно или как часть узла и выполнены с возможностью измерения и/или контроля вращения карданного механизма и соединения. Параметрами управления можно управлять на основе измерений датчика. Датчики могут быть выполнены с возможностью измерения вращения первого карданного шарнира, второго карданного шарнира и второго вала и могут дополнительно быть выполнены с возможностью передачи измерений в процессор данных для управления параметрами управления.
В случае, если рукоятка управления используется для управления полетом самолета, первый параметр управления управляет тангажем, второй параметр управления управляет креном, а третий параметр управления управляет рысканием. В альтернативном варианте осуществления первый параметр управления может управлять креном, второй параметр управления может управлять тангажем, а третий параметр управления может управлять рысканием.
Параметры управления могут использоваться для управления перемещением поверхностей неподвижных или поворотных крыльев, таких как элероны, закрылки, флапероны, спойлероны, рули и т. д. Они также могут использоваться для управления углом атаки лопастей в вертолетах для управления тангажом, креном, подъемом, рысканием и т. д. Они могут управлять судами, такими как подводные лодки, суда на подводных крыльях, на воздушной подушке, наземные транспортные средства или такие системы, как краны и подъемники, дистанционно управляемые беспилотные летательные аппараты, роботы, учебные тренажеры и т.д.
Рукоятка управления может быть устроена таким образом, чтобы динамика или движения самолета, управляемые параметрами управления, интуитивно соответствовали движениям, выполняемым пилотом при перемещении рукоятки управления при управлении этими движениями. Например, перемещением рукоятки управления в переднем и заднем направлении можно управлять тангажем самолета, перемещением влево и вправо можно управлять креном, а вращением рукоятки 102 можно управлять рысканием (например, путем управления рулями).
Вышеописанная конфигурация позволяет управлять таким транспортным средством, как самолет. Например, рукоятка управления может управлять тангажем, креном и рысканием самолета в зависимости от перемещения рукоятки пилотом вокруг трех осей, которые пересекаются в одной точке. В альтернативном варианте осуществления рукоятка управления может использоваться для управления любой системой, в которой требуются по меньшей мере три степени свободы. Пересечение осей может улучшить удобство управления рукояткой управления и обеспечить ее совместимость с интуитивным пониманием органов управления пилотом. Вышеописанная система также может быть выполнена компактно, чтобы освободить место для других систем. Расположение рукоятки управления может обеспечить более компактный узел, чем известные узлы, благодаря соединению, вложенному в карданный механизм, и осям, пересекающимся в одной точке в соединении.
Компактная конструкция позволяет свести к минимуму ощущение инерции в системе управления. Масса систем управления полетом может быть значительно снижена. Приобретение компонентов узла может быть простым. Затраты на установку и обслуживание могут быть снижены. Пространство в области ног пилота может быть доступно, также как и пространство под полом кабины.
Системы настоящего изобретения, как описано выше и показано на графических материалах, обеспечивают рукоятку управления с превосходными свойствами, включая улучшенное удобство использования и размер. Хотя устройство данного изобретения было показано и описано со ссылкой на варианты осуществления, специалисты в данной области техники легко поймут, что изменения и/или модификации могут быть внесены в него без отклонения от объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| РУЧКА УПРАВЛЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА | 2013 |
|
RU2611323C2 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Боковая ручка управления (варианты) | 2017 |
|
RU2681462C1 |
| БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО АТТРАКЦИОНА ДЛЯ КАТАНИЯ DARK RIDE, СИСТЕМА И СПОСОБ | 2012 |
|
RU2591549C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1994 |
|
RU2126344C1 |
| ЗАДНЕЕ ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И МЕДИЦИНСКОЕ УСТРОЙСТВО | 2022 |
|
RU2828362C2 |
| УСТРОЙСТВО И СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ПОВОРОТНЫХ ЭЛЕМЕНТОВ | 2004 |
|
RU2353545C2 |
| УЗЕЛ ОПЕРЕНИЯ САМОЛЕТА, УЗЕЛ ПЕРЕДНЕГО ОПЕРЕНИЯ САМОЛЕТА, УСТРОЙСТВО ДЛЯ ОПОРЫ И ВРАЩЕНИЯ ПОДВИЖНЫХ КОМПОНЕНТОВ, СПОСОБ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА РОЛИКОВОЙ СИСТЕМЫ УСТРОЙСТВА ДЛЯ ВРАЩЕНИЯ ПОДВИЖНЫХ КОМПОНЕНТОВ | 2003 |
|
RU2359866C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
Изобретение относится к узлу для системы управления, в частности к узлу для системы управления, содержащей трехосную рукоятку управления. Модуль рукоятки управления самолета включает в себя узел, содержащий первый и второй вал, соединенные между собой, и карданный механизм. Причем соединение вложено в карданный механизм, а источник вращения соединения совпадает с источником вращения карданного механизма. При этом карданный механизм обеспечивает оси вращения для первого вала, и соединение обеспечивает оси вращения для первого вала. Причем оси вращения, обеспечиваемые карданным механизмом, и оси вращения, обеспечиваемые соединением, пересекаются при совпадении источников вращения. При этом карданный механизм содержит первый карданный шарнир, расположенный внутри второго карданного шарнира и соединенный с возможностью вращения с этим вторым карданным шарниром. Причем второй карданный шарнир расположен внутри рамы и соединен с этой рамой с возможностью вращения. При этом указанный узел содержит датчики для измерения и контроля вращения первого карданного шарнира, второго карданного шарнира и второго вала. Повышается удобство при управлении самолетом. 2 н. и 7 з.п. ф-лы, 8 ил.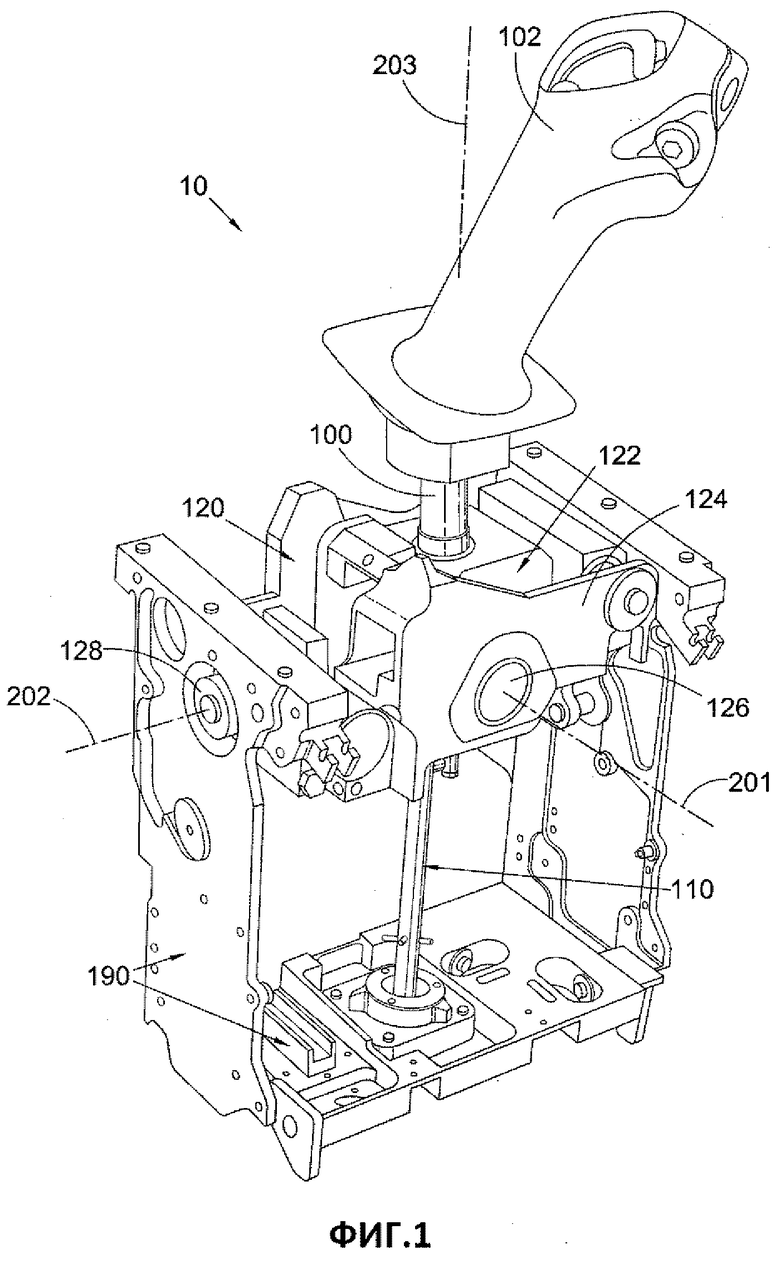
1. Модуль рукоятки управления самолета, включающий в себя узел, который содержит:
первый вал (100);
второй вал (110);
соединение (140), соединяющее первый и второй валы (100, 110);
и карданный механизм (120),
причем соединение (140) вложено в карданный механизм (120), а источник вращения (302) соединения (140) совпадает с источником вращения (301) карданного механизма (120),
при этом карданный механизм (120) обеспечивает оси (201, 202) вращения для первого вала (100), и соединение (140) обеспечивает оси (203, 204, 205) вращения для первого вала (100);
причем оси (201, 202) вращения, обеспечиваемые карданным механизмом (120), и оси (203, 204, 205) вращения, обеспечиваемые соединением (140), пересекаются при совпадении источников вращения,
при этом карданный механизм (120) содержит первый карданный шарнир (122), расположенный внутри второго карданного шарнира (124) и соединенный с возможностью вращения с этим вторым карданным шарниром (124),
причем второй карданный шарнир (124) расположен внутри рамы (190) и соединен с этой рамой (190) с возможностью вращения,
при этом указанный узел содержит датчики для измерения и/или контроля вращения первого карданного шарнира (122), второго карданного шарнира (124) и второго вала (110).
2. Модуль по п.1, в котором первый вал (100) способен вращаться вокруг первой оси (201), второй оси (202) и третьей оси (203);
причем вращение первого вала (100) вокруг первой оси (201) приводит к вращению первого карданного шарнира (122) вокруг первой оси (201), вращение первого вала (100) вокруг второй оси (202) приводит к вращению первого и второго карданных шарниров (122, 124) вокруг второй оси (202), а вращение первого вала (100) вокруг третьей оси (203) приводит к вращению второго вала (110) относительно его длины.
3. Модуль по п.2, в котором третья ось (203) определена вдоль длины первого вала (100).
4. Модуль по любому из предыдущих пунктов, в котором узел дополнительно содержит рукоятку (102), установленную на первом валу (100).
5. Модуль по любому из предыдущих пунктов, в котором узел представляет собой рукоятку управления, предпочтительно для управления самолетом.
6. Модуль по п.4, в котором узел представляет собой рукоятку управления, предпочтительно для управления самолетом, причем перемещение рукоятки (102) в направлении вперед и назад управляет тангажем, перемещение рукоятки (102) влево и вправо управляет креном, а вращение рукоятки (102) относительно ее длины управляет рысканием.
7. Модуль по любому из предыдущих пунктов, в котором соединение (140) представляет собой универсальное соединение.
8. Способ управления системой управления, содержащий модуль по любому из предыдущих пунктов, причем способ включает в себя вращение первого вала (100) вокруг источника вращения (302) соединения (140), вложенного в карданный механизм (120), во время которого источник вращения (302) соединения (140) совпадает с источником вращения (301) карданного механизма (120).
9. Способ по п.8, который включает в себя вращение первого вала (100) и первого карданного шарнира (122) вокруг первой оси (201) для управления первым параметром управления самолетом; вращение первого вала (100), первого карданного шарнира (122) и второго карданного шарнира (124) вокруг второй оси (202) для управления вторым параметром управления самолетом; и вращение первого вала (100) вокруг третьей оси (203) для управления третьим параметром управления самолетом.
| US 4667909 A, 26.05.1987 | |||
| ПРИМЕНЕНИЕ ЛАЦИДИПИНА ДЛЯ ЛЕЧЕНИЯ АРТЕРИОСКЛЕРОЗА | 1992 |
|
RU2136279C1 |
| "Конструкция самолетов", Г.И | |||
| Житомирский, издательство "Машиностроение", Москва, 1991, всего 400 страниц, стр | |||
| Способ приготовления массы для карандашей | 1921 |
|
SU311A1 |

