Изобретение относится к средствам управления самолетом по тангажу (продольному каналу управления) и крену (поперечному каналу управления). Устройство предназначено для работы в составе электродистанционной системы управления.
Из области техники известно большое количество конструктивно-кинематических схем активных боковых ручек управления (БРУ), анализ которых приведен в таблице 1 стр. 10-14 статьи ʺРазработка БРУ самолетом на основе электромеханических силовых мини-приводовʺ, журнал ʺВестник московского авиационного института №4 2015. Все известные БРУ построены по принципу механизма с двумя степенями подвижности. Недостатком этих схем являются большие габариты; не идентичность характеристик люфта, жесткости и инерционность из-за различной реализации приводов по каналам управления и, как следствие, сложность изготовления и повышенная стоимость БРУ.
Известна Боковая ручка управления самолетом, где использовано два одинаковых электропривода, выполненных в форме цилиндров и содержащих бесколлекторный электродвигатель, механическую передачу и датчик положения выходного звена. Патент RU 2571992 C6 МПК В64С 13/12. Этот патент принят за прототип.
Недостатком этой БРУ является расположение электроприводов один над другим, так что их продольные оси расположены под углом 90° и образуют совместно с основанием кардан. При такой компоновке электропривод, расположенный на основании имеет больший момент инерции, чем второй, так как ему приходится вращать электропривод, расположенный над ним.
Целью изобретения является уменьшение массогабаритных показателей и унификация электроприводов.
Указанная цель достигается следующим.
В варианте 1 боковая ручка управления самолетом, с двумя вращательными степенями свободы, включающая рукоятку со стержнем, основание с электроприводами поперечного и продольного каналов управления, имеющими форму цилиндров и содержащими бесколлекторный электродвигатель, редуктор и датчик положения выходного вала, дополнительно включает оси выходных валов электроприводов, размещенные параллельно оси стержня рукоятки и на выходном валу каждого электропривода установлен четырехзвенный шарнирный механизм с тремя степенями свободы, состоящий из косого кривошипа, выполненного в форме конической эксцентриковой втулки, ось которой закреплена на выходном валу электропривода, и ее эксцентриковая ось выполнена с возможностью вращения относительно конической эксцентриковой втулки, а на наружной поверхности конической эксцентриковой втулки установлен шарнир, ось которого расположена перпендикулярно оси электропривода на которой с возможностью вращения размещена вилка, при этом оси конических эксцентриковых втулок с вилками в электроприводах продольного и поперечного каналов расположены перпендикулярно соответствующим направлениям движения рукоятки, кроме того оси выходного вала электропривода, конической эксцентриковой втулки и вилки пересекаются в одной точке, при этом вилка электропривода поперечного канала выполнена как составная часть стержня рукоятки, а вилка электропривода продольного канала соединена с вилкой электропривода поперечного канала качалкой с шарнирами с одной степенью свободы, расположенными на ее концах.
В варианте 2 боковая ручка управления самолетом дополнительно имеет продольные оси выходных валов электроприводов, размещенные перпендикулярно оси стержня рукоятки, являющиеся соосными между собой, при этом электропривод продольного канала снабжен четырехзвенным шарнирным механизмом с тремя степенями свободы к эксцентриковой втулке которого перпендикулярно осям электроприводов закреплена ось стержня рукоятки, а к выходному валу электропривода поперечного канала прикреплена вилка, соединенная шарнирно с эксцентриковой втулкой электропривода продольного канала так, что оси выходных валов электроприводов, шарнира вилки электропривода поперечного канала и стержня рукоятки пересекаются в одной точке.
В варианте 3 боковая ручка управления самолетом дополнительно включает продольные оси выходных валов электроприводов, расположенные параллельно между собой в плоскости перпендикулярной оси стержня рукоятки, а к выходному валу электропривода поперечного канала прикреплен угольник на конце которого имеется отверстие, в которое установлена деталь, внутри которой размещена крестовина, продольная ось которой соосна с осью выходного вала электропривода, на наружной поверхности детали перпендикулярно к оси вала электропривода расположен стержень рукоятки, а на выходном валу электропривода продольного канала закреплена вилка, внутри которой размещена крестовина с расположением вертикальной оси параллельно стержню рукоятки, при этом вертикальные оси крестовин соединены между собой валом и образуют карданный механизм.
Сущность изобретения поясняется чертежами, представленными на фигурах 1-4.
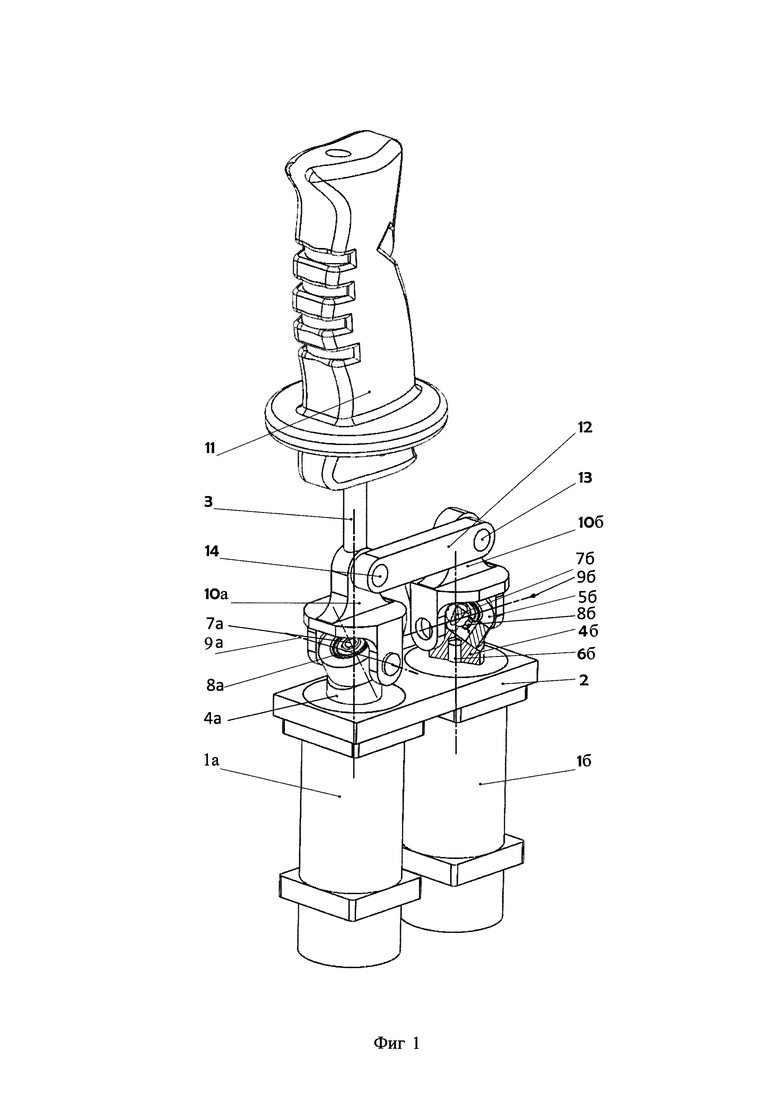
На фиг. 1 представлен общий вид БРУ с расположением электроприводов параллельно стержню рукоятки.
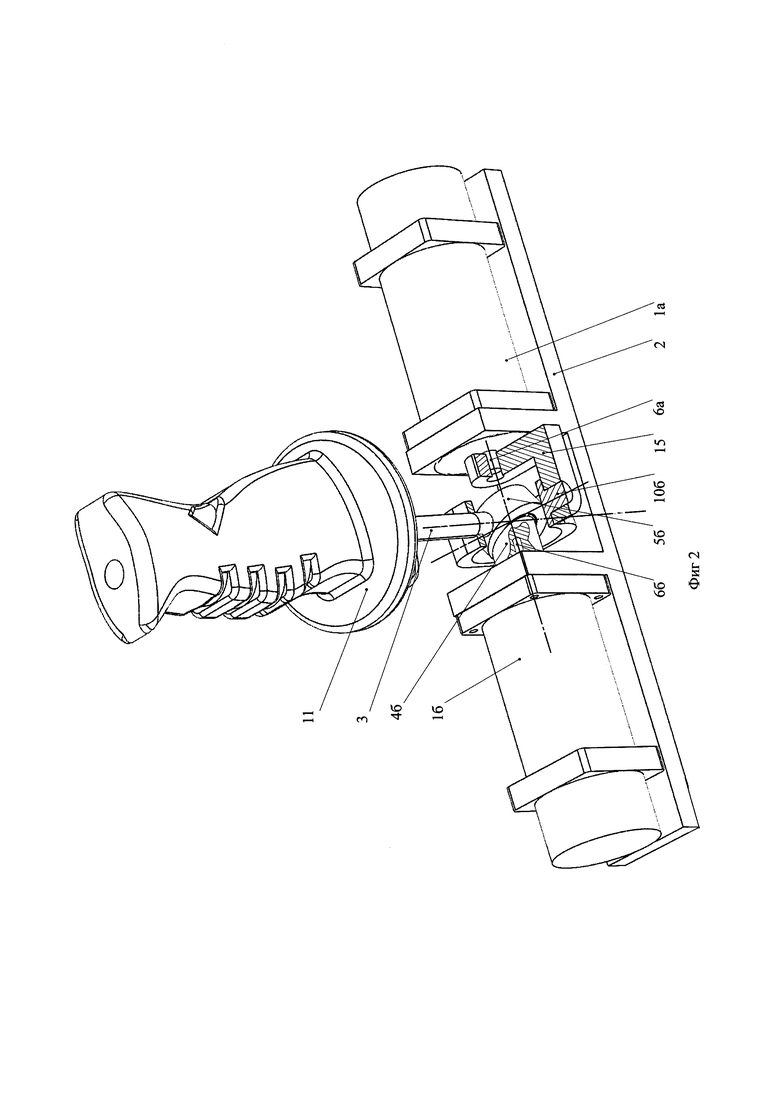
На фиг. 2 представлен общий вид БРУ с расположением электроприводов перпендикулярно стержню рукоятки и соосно между собой.
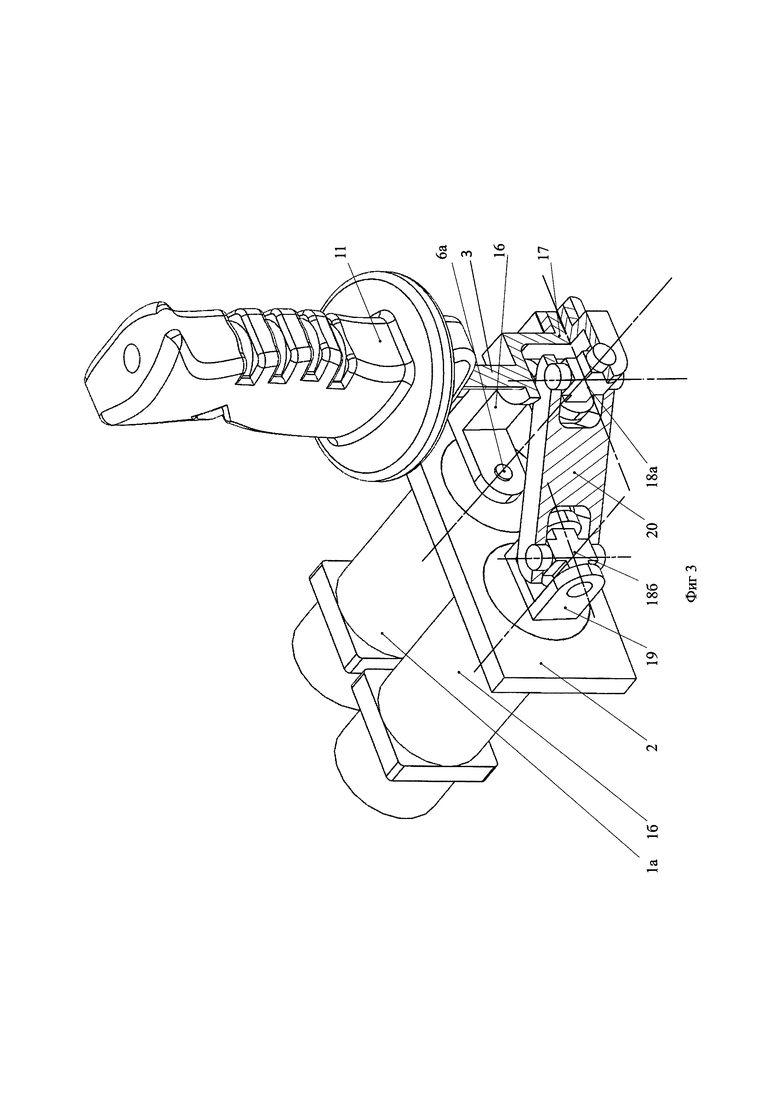
На фиг. 3 представлен общий вид БРУ с расположением электроприводов перпендикулярно валу рукоятки и параллельно между собой.
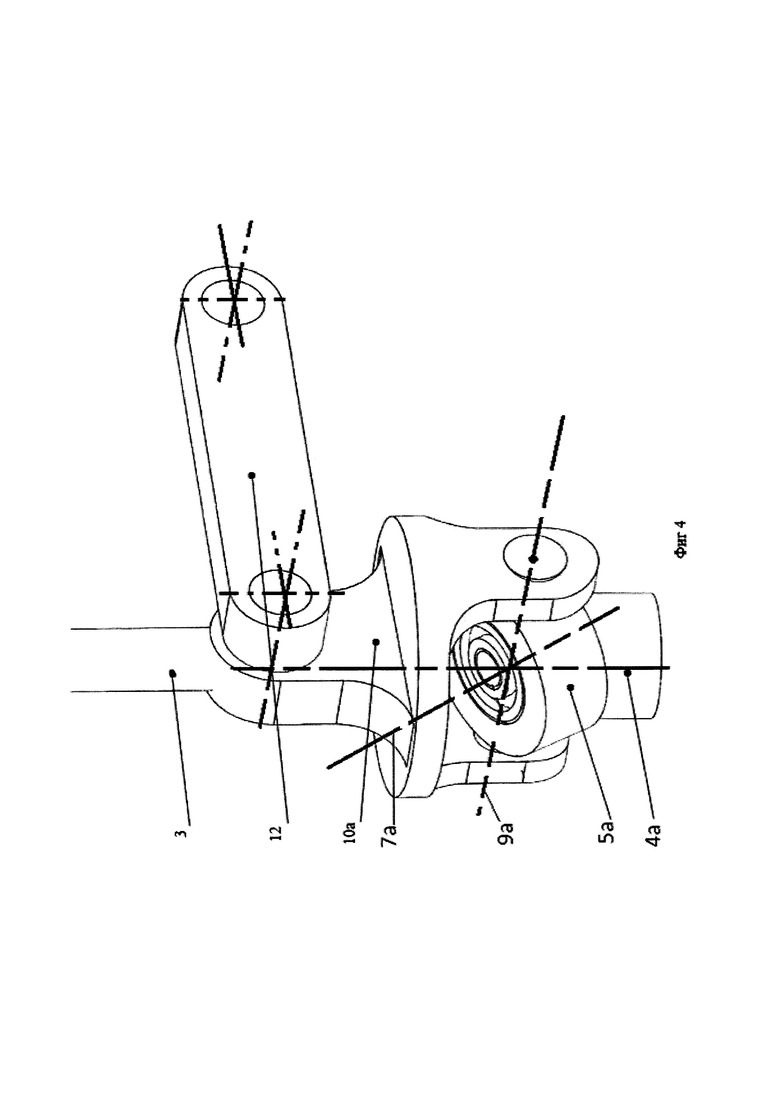
На фиг. 4 представлен вид четырехзвенного механизма поперечного канала с наклонной шайбой.
Два электропривода 1а и 1б для управления в поперечном и продольном каналах (по крену и тангажу, соответственно), каждый из которых имеет одну степень подвижности. Электроприводы 1а и 1б содержат бесколлекторный электродвигатель, редуктор и датчик положения выходного звена. Электроприводы 1а и 1б размещены в общем корпусе 2 и имеют форму цилиндров, продольные оси которых расположены параллельно продольной оси стержня рукоятки. На выходном валу каждого электропривода установлен четырехзвенный шарнирный механизм с тремя степенями подвижности. Каждый сферический механизм состоит из косого кривошипа 4а и 4б с конической эксцентриковой втулкой 5а и 5б. Центральные оси кривошипов 4а и 4б закреплены на выходных валах 6а и 6б электроприводов 1а и 1б. (на фиг. 1 выходной вал 6а не показан) Эксцентриковые оси 7а и 7б сферических механизмов выполнены с возможностью вращения относительно конических эксцентриковых втулок 5а и 5б на подшипниках 8а и 8б. На наружных поверхностях конических эксцентриковых втулок 5а и 5б перпендикулярно центральной оси электроприводов 1а и 1б на осях 9а и 9б размещены диаметрально два шарнира, которые обеспечивают вращение вилок поперечного канала 10а, и продольного канала 10б. При этом центральные оси электроприводов 1а и 1б с коническими втулками 5а и 5б, оси 7а и 7б эксцентриков и оси шарниров 9а и 9б качающихся шайб пересекаются в одной точке (показано на фиг. 4 для поперечного канала).
Вилка поперечного канала 10а электропривода 1а выполнена как составная часть стержня 3 рукоятки 11, а вилка продольного канала 10б второго электропривода 1б соединена с вилкой поперечного канала 10а качалкой 12 с помощью одностепенных вращательных шарниров 13, 14, расположенных на концах качалки 12.
В варианте 2 боковой ручки управления самолетом (фиг. 2) оси расположены соосно между собой и перпендикулярно оси стержня рукоятки 3. На выходном валу электропривода 1б продольного канала тангажа установлен четырехзвенный шарнирный механизм с тремя степенями подвижности аналогичного описанному в варианте 1. Этот сферический механизм состоит из косого кривошипа 4б с конической эксцентриковой втулкой 5б. Центральная ось кривошипа 4б закреплена на выходном валу 6б электропривода 1б. На наружной поверхности эксцентриковой втулки 5б перпендикулярно центральной оси электропривода 1б размещен шарнир, который обеспечивает вращение вилки продольного канала 10б.
На валу 6а электропривода 1а поперечного канала закреплена вилка 15, соединенная шарнирно с вилкой 10 б электропривода 1б продольного канала так, что оси выходных валов 6а и 6б электроприводов 1а и 1б, шарнира вилки 10б электропривода поперечного канала и стержня 11 рукоятки 3 пересекаются в одной точке, (показано на фиг. 2)
В варианте 3 боковой ручки управления самолетом (фиг. 3) продольные оси расположены соосно между собой и перпендикулярно оси стержня рукоятки 11. К выходному валу 6а электропривода 1а поперечного канала прикреплен угольник 16, на конце которого имеется отверстие, в которое установлена стойка 17, внутри которой размещена крестовина 18а, продольная ось которой соосна с осью выходного вала электропривода 1а, на наружной поверхности стойки 17 перпендикулярно к оси вала электропривода 1а расположен стержень рукоятки 11, т.е. оси вала 6а электропривода 1а и стержня 3 рукоятки 11 пересекаются в точке пересечения осей крестовины 18а.
На выходном валу электропривода 1б продольного канала закреплена вилка 19, внутри которой размещена крестовина 18б с расположением вертикальной оси параллельно стержню 3 рукоятки 11, при этом вертикальные оси крестовин 18а и 18б соединены между собой валом 20 и образуют карданный механизм.
Боковая ручка управления работает следующим образом.
В варианте 1 (см. фиг. 1) при наличии управляющего сигнала на электроприводе 1а, расположенном соосно со стержнем 3 рукоятки 11, вращается выходной вал 6а (на фиг. 1 не показан) электропривода 1а совместно с конической эксцентриковой втулкой 5а. Так как центральная ось 7а конической эксцентриковой втулки 5а и ось шарнира 9а пересекаются в одной точке, то вилка поперечного канала 10а совместно со стержнем 3 рукоятки 11 будет совершать качательное движение в поперечном направлении (по оси крена). При подаче сигнала на второй электропривод 1б, вилка продольного канала 10б через качалку 12 и шарниры 13, 14 будет передавать качательное движение на стержень 3 рукоятки 11 в продольном направлении (по оси тангажа).
В варианте 2 (см. фиг. 2) при наличии управляющего сигнала на электроприводе 1а вращается вал 6а который поворачивает вилку 15, в которой установлена вилка поперечного канала 10б, на которой закреплен стержень 3 рукоятки 11, и, соответственно отклоняет рукоятку в плоскости перпендикулярной осям электроприводов 1а и 1б.
При наличии управляющего сигнала на электроприводе 1б поперечного канала вращается вал 6б, на котором установлен косой кривошип 4б на котором закреплена эксцентриковая втулка 5б, шарнирно установленная в вилке поперечного канала 10б. Поворот косого кривошипа 4б обеспечивает изменение проекции угла наклона эксцентриковой втулки 5б на плоскость основания, таким образом поворот косого кривошипа приводит к отклонению рукоятки в плоскости параллельной осям валов электроприводов 1а и 1б.
В варианте 3 (см. фиг. 3) при наличии управляющего сигнала на электроприводе канала крена 1а поворачивается вал 6а, на котором закреплен угольник 1б, шарнирно соединенный с деталью 17, на которой расположен стержень 3 рукоятки 11. Поворот вала 6а приводит к отклонению рукоятки 11 в плоскости перпендикулярной осям электроприводов 1а и 1б.
При наличии управляющего сигнала на электроприводе продольного канала 1б поворачивается вал 6б и закрепленная на нем вилка 19, в которой шарнирно установлена крестовина 18б, которая шарнирно соединена с крестовиной 18б с помощью вала 20, который является частью карданного механизма. Таким образом вращение вала 6б с помощью карданного механизма обеспечивает движение рукоятки 11 в плоскости параллельной электроприводам 1а и 1б.
Таким образом, установка сферических шарниров на выходные валы электроприводов и соединение выходного звена одного шарнира непосредственно с валом рукоятки, а второго шарнира с валом рукоятки через продольный рычаг с двумя шарнирами позволяет обеспечить рукоятке БРУ две степени свободы без карданного шарнира, что существенно сокращает габариты, снижает влияние инерционной составляющей движения и позволяет унифицировать электроприводы за счет обеспечения идентичности характеристик электроприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
| СДВОЕННЫЙ ШАРНИР /ЕГО ВАРИАНТЫ/ | 2006 |
|
RU2303719C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1991 |
|
RU2009348C1 |
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2364780C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| Ямокопатель | 1981 |
|
SU1021374A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| ПЕРЕНОСНОЙ СТАНД ДЛЯ ПРОВЕРКИ ПАРОВОЗНОЙ РАМЫ | 1935 |
|
SU49277A1 |
Изобретение относится к средствам управления самолетом по тангажу и крену. Боковая ручка управления самолетом с двумя вращательными степенями свободы включает рукоятку 11, основание 2 с двумя электроприводами (1а) поперечного канала и (1б) продольного канала, имеющими форму цилиндров и содержащими бесколлекторный электродвигатель, редуктор и датчик положения выходного звена. Продольные оси цилиндрических поверхностей электроприводов (1а, 1б) размещены параллельно продольной оси стержня рукоятки. На выходном валу каждого электропривода установлен четырехзвенный шарнирный механизм с тремя степенями свободы, состоящий из косого кривошипа (4а, 4б), выполненного в форме конической эксцентриковой втулки (5а, 5б), центральная ось которой закреплена на выходном валу электропривода (1а, 1б), а ее эксцентриковая ось выполнена с возможностью вращения относительно эксцентриковой втулки. На наружной поверхности конической эксцентриковой втулки установлен шарнир, ось (7а, 7б) которого расположена перпендикулярно оси электропривода (1а, 1б), на которой с возможностью вращения размещена вилка, так что ось электропривода, ось конической эксцентриковой втулки и ось вилки пересекаются в одной точке. Обеспечивается уменьшение массогабаритных показателей и унификация электроприводов. 3 н.п. ф-лы, 4 ил.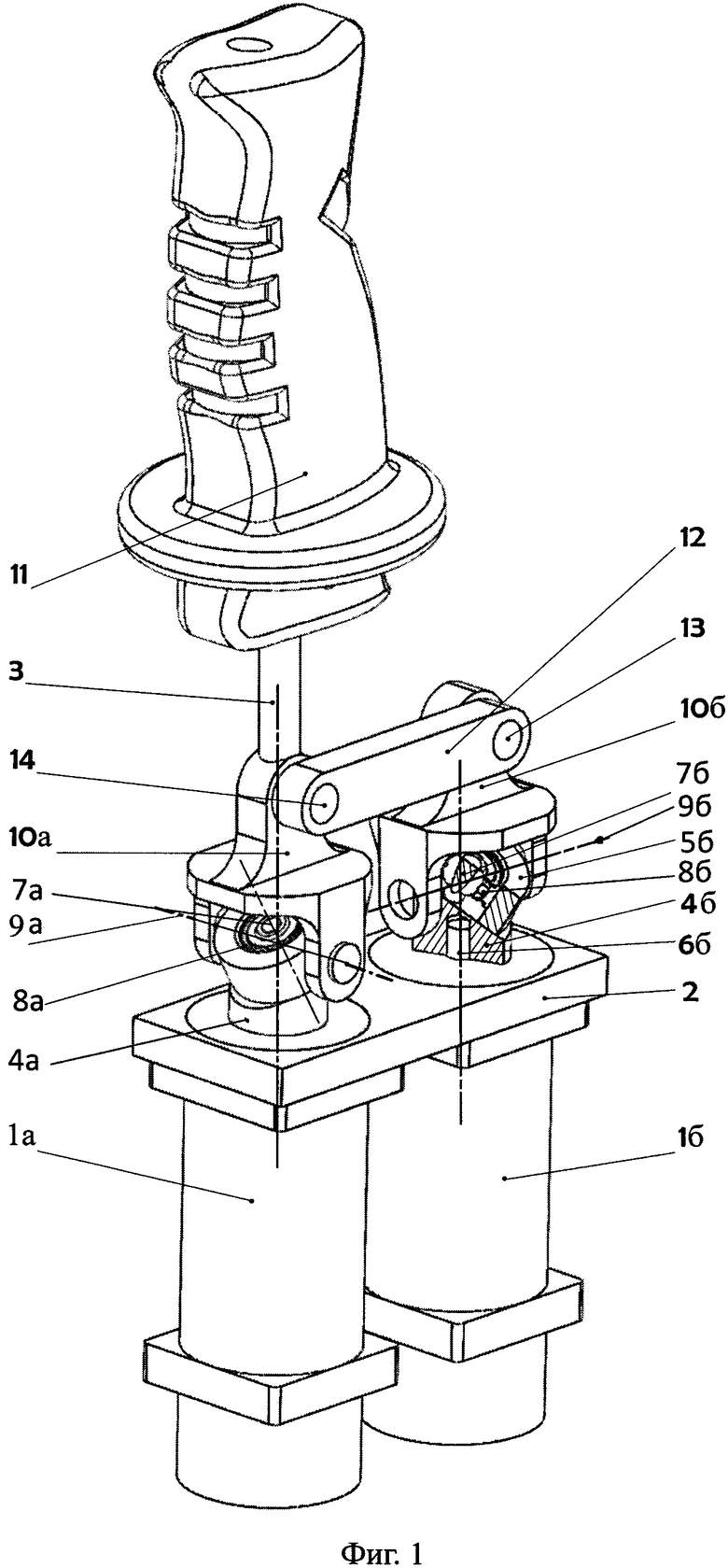
1. Боковая ручка управления самолетом с двумя вращательными степенями свободы, включающая рукоятку со стержнем, основание с электроприводами поперечного и продольного каналов управления, имеющими форму цилиндров и содержащими бесколлекторный электродвигатель, редуктор и датчик положения выходного вала, отличающаяся тем, что оси выходных валов электроприводов размещены параллельно оси стержня рукоятки и на выходном валу каждого электропривода установлен четырехзвенный шарнирный механизм с тремя степенями свободы, состоящий из косого кривошипа, выполненного в форме конической эксцентриковой втулки, ось которой закреплена на выходном валу электропривода, и ее эксцентриковая ось выполнена с возможностью вращения относительно конической эксцентриковой втулки, а на наружной поверхности конической эксцентриковой втулки установлен шарнир, ось которого расположена перпендикулярно оси электропривода, на которой с возможностью вращения размещена вилка, при этом оси конических эксцентриковых втулок с вилками в электроприводах продольного и поперечного каналов расположены перпендикулярно соответствующим направлениям движения рукоятки, кроме того, оси выходного вала электропривода, конической эксцентриковой втулки и вилки пересекаются в одной точке, при этом вилка электропривода поперечного канала выполнена как составная часть стержня рукоятки, а вилка электропривода продольного канала соединена с вилкой электропривода поперечного канала качалкой с шарнирами с одной степенью свободы, расположенными на ее концах.
2. Боковая ручка управления самолетом с двумя вращательными степенями свободы, включающая рукоятку со стержнем, основание с электроприводами поперечного и продольного каналов управления, имеющими форму цилиндров и содержащими бесколлекторный электродвигатель, редуктор и датчик положения выходного вала, отличающаяся тем, что продольные оси выходных валов электроприводов размещены перпендикулярно оси стержня рукоятки и соосны между собой, при этом электропривод продольного канала снабжен четырехзвенным шарнирным механизмом с тремя степенями свободы, к эксцентриковой втулке которого перпендикулярно осям электроприводов закреплена ось стержня рукоятки, а к выходному валу электропривода поперечного канала прикреплена вилка, соединенная шарнирно с эксцентриковой втулкой электропривода продольного канала так, что оси выходных валов электроприводов, шарнира вилки электропривода поперечного канала и стержня рукоятки пересекаются в одной точке.
3. Боковая ручка управления самолетом с двумя вращательными степенями свободы, включающая рукоятку со стержнем, основание с электроприводами поперечного и продольного каналов управления, имеющими форму цилиндров и содержащими бесколлекторный электродвигатель, редуктор и датчик положения выходного вала, отличающаяся тем, что продольные оси выходных валов электроприводов расположены параллельно между собой в плоскости, перпендикулярной оси стержня рукоятки, а к выходному валу электропривода поперечного канала прикреплен угольник, на конце которого имеется отверстие, в которое установлена деталь, внутри которой размещена крестовина, продольная ось которой соосна с осью выходного вала электропривода, на наружной поверхности детали перпендикулярно к оси вала электропривода расположен стержень рукоятки, а на выходном валу электропривода продольного канала закреплена вилка, внутри которой размещена крестовина с расположением вертикальной оси параллельно стержню рукоятки, при этом вертикальные оси крестовин соединены между собой валом и образуют карданный механизм.
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2003 |
|
RU2253593C2 |
| БОКОВАЯ КИСТЕВАЯ РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2164878C2 |
| US 4069720 A1, 24.01.1978 | |||
| US 5456428 A1, 10.10.1995. | |||

