Заявленное изобретение относится к исследовательским инструментам для механобиологических экспериментов, в ходе которых необходимо осуществить контролируемую деформацию клеток или эмбриональных тканей, и содержит описание устройства для высокоточного (прецизионного) одноосевого растяжения эластичных субстратов с клетками или фрагментами ткани.
Клетки в составе многих типов тканей, как в постнатальном периоде, так и в ходе эмбрионального развития, подвержены регулярной, а в некоторых случаях - достаточно амплитудной деформации. В случае эмбрионального развития одним из процессов, наиболее явно сопряженных с выраженной деформацией тканей, является морфогенез - группа процессов, связанных с изменением формы эмбриональных структур. Возникновение деформации, равно как и изменение формы, сопряжено с изменением положения элементов тела друг относительно друга. Согласно следствию из первого закона Ньютона, привести к изменению телом своего положения (более строго - к изменению характера движения тела) может только механическая сила. Поэтому изучение реакции клеток и тканей на действие механических сил представляет фундаментальный научный интерес. Исследования в этой области биологии, называемой механобиологией, продемонстрировали, что действие механической силы не ограничивается пассивным влиянием на положение структурных элементов в клетках и тканях. Механическая сила способна инициировать различные варианты клеточного ответа, от экспрессии генов (Brunet et al., 2013; Kornikova et al., 2010), активации сигнальных каскадов и внутриклеточных перестроек до сложных многоклеточных процессов наподобие эпителиальных морфогенезов (Brodland et al., 2010; Conte et al., 2012; Kupaeva et al., 2018) или коллективной миграции клеток (Beloussov et al., 2000; Trepat et al., 2009). Клеточная миграция опосредует наиболее глобальные изменения формы и потому представляет особый интерес в контексте исследования морфогенеза.
Накопленные данные указывают на то, что механическое взаимодействие клеток внутри пласта через клеточные контакты необходимо для поддержания коллективных движений клеток (Dumortier et al., 2012; Sonavane et al., 2017; Weber et al., 2012); при этом, сил, развиваемых клетками, достаточно не только для поддержания, но и для инициации выраженного кооперативного ответа (Shindo et al., 2010). Механические стимулы способны не только поддерживать клеточные движения в тех тканях, где они происходят в нормальном развитии (Нага et al., 2013), но и индуцировать их в эктопических участках (Beloussov et al., 2000). В пользу предположения, что обнаруженные механозависимые движения играют важную морфогенетическую роль в нормальном развитии, свидетельствует обнаружение потенциального механизма регуляции таких движений в виде глобальных, стадиеспецифических градиентов механических напряжений в эмбриональных тканях (Beloussov et al., 1975). Для того, чтобы выстроить на основании описанных выше данных целостную концепцию, необходимо детально изучить, как локальные деформации в ходе клеточных движений влияют на распределение механических напряжений в ткани и, наоборот, зависят ли локальные деформации от напряжений в ткани. Исследовательским инструментом для решения подобных задач являются устройства для контролируемого растяжения клеток, т.к. они позволяют воспроизводимо осуществлять деформацию эмбриональных тканей (Kamble et al., 2016; Stooke-Vaughan et al., 2017), а также измерять механические свойства исследуемых объектов (Tremblay et al., 2014).
Компонент установки для растяжения, который осуществляет высокоточное позиционирование подвижных частей, называется актуатором. В течение последних 20 лет было внедрено множество разновидностей технологий позиционирования (см. обзор Kamble et al., 2016). Одной из наиболее ранних технологий были электромагнитные актуаторы. Несмотря на недостатки (в числе которых существование областей резонанса и нагрев), электромагнитные линейные актуаторы, в особенности - основанные на гибридных шаговых двигателях, актуальны до сих пор, т.к. они сочетают высокую точность позиционирования и развиваемое усилие с возможностью программирования и низкий стоимостью.
Схожий с описанным в текущем патенте принцип применяется в опубликованной заявке US 20120219981 A1 от 30.08.2012. В указанной заявке используется пара соосных двигателей для растяжения инкубационной камеры в противоположных направлениях вдоль одной оси, благодаря чему минимизируется смещение исследуемого объект из поля зрения при растяжении. Одно из основных отличий заключается в том, что изобретение US 20120219981 А1 предполагает использование вместо гибридных шаговых актуаторов другой тип электромагнитных актуаторов - соленоидных двигателей. Установка для растяжения, основанная на соленоидных двигателях, также описана в (Tremblay et al., 2014). Установка использует систему из четырех независимо управляет соленоидных двигателей, попарно ориентированных вдоль двух перпендикулярных осей. Таким образом, каждая пара двигателей осуществляет растяжение субстрата в противоположных направлениях вдоль одной оси. Такая компоновка двигателей позволяет осуществлять растяжение субстрата независимо по двум осям. Публикация также содержит описание процедуры измерения механических свойств исследуемой ткани. Для этого катушка индуктивности одного из соленоидных двигателей (выполняющая функцию штока в гибридном шаговой актуаторе) фиксируется, и между ней и креплением для субстрата помещается тензометрический датчик. Применение соленоидных двигателей позволяет снизить тепловыделение по сравнению с шаговыми актуаторами, но при этом снижает развиваемое установкой усилие, что может быть критично при использовании инкубационных камер из-за их достаточно высокого сопротивления растяжению, а также делает дизайн устройства более громоздким.
В опубликованной заявке CN 106867888A от 20.06.2017 для позиционирования креплений для субстрата применен шаговый двигатель. Шаговый двигатель вращает двухрезьбовой винт, что позволяет при использовании гаек с соответствующим направлением резьбы синхронно приводить в движение обе точки крепления подложки одним мотором. Однако, такая конструкция установки не предусматривает возможности независимо управлять каждым из моторов, что может потребоваться для процедуры измерения механических свойств исследуемых объектов (см. Tremblay etal., 2014).
Среди приведенных в обзоре изобретений, изобретение, содержащееся в опубликованной заявке WO 2018149795 A1 от 23.008.2018, обладает наиболее миниатюрным дизайном и, в то же время, обеспечивает возможность двухосевого растяжения с амплитудой до 200%. Механизм растяжения основан на использовании двух соосных дисков - подвижного диска с зубьями и неподвижной дискообразной платформы, между которыми находятся дугообразные стержни. Винтовая передача приводит в движение зубчатый диск, механически сопряженный с каждым из четырех дугообразных стержней точкой вращения. Каждый из стержней, в свою очередь, с помощью штифтов сопряжен с зажимом для подложки. Вращение зубчатого колеса приводит к сдвигу стержней, который трансформируется в линейное перемещение благодаря скольжению штифтов по ложбинкам в нижележащей платформе. Линейное перемещение штифтов приводит к линейному перемещению зажимов для подложки. Однако изобретение не содержит данных о величине люфта в используемой винтовой передаче и описание механизма его компенсации, а также концепция изделия не подразумевает возможности создания системы с обратной связью для высокоточного контроля положения точек захвата подложки.
Двухосевая установка для растяжения на основе шаговых актуаторов описана в публикации (Cruz et al., 2019). В установке используются квадратные инкубационные камеры, в каждом углу которых имеется вертикальный канал. Через эти каналы инкубационная камера фиксируется на установку при помощи четырех точек крепления, каждая из которых несет штифт. Три точки крепления являются подвижными, а четвертая неподвижно закреплена на основании установки. Установка использует две пары коллинеарных сонаправленных линейных актуаторов для позиционирования точек крепления в двух перпендикулярных друг другу направлениях. Каждая пара линейных актуаторов осуществляет позиционирование двух точек крепления, так, что одна из точек крепления является общей для обоих направлений. Однако, такой дизайн установки не позволяет сделать ее достаточно компактной.
Компактность установки для растяжения может являться критическим параметром, т.к. конструкция микроскопа (расстояние от конденсора до поверхности предметного столика, диаметр конденсора, наличие бокса) может налагать пространственные ограничения на размеры установки и потому осложнять использование устройства для растяжения. При этом установка должна также обладать симметричным дизайном и распределением веса, чтобы обеспечить устойчивость установки при размещении на микроскопе.
Разработав компактный дизайн установки, важно также обеспечить широкий диапазон амплитуды деформации субстрата, т.к. в ходе эмбрионального развития клетки могут претерпевать значительные деформации (Keller, 1978; Morita et al., 2012), а расстояния между близлежащими клетками в эмбриональной ткани могут увеличиваться до 170% от исходного значения (Chien et al., 2015; Evstifeeva et al., 2018). Необходимо также учесть, что растяжение субстрата передается на культивируемые объекты не в полном объеме, с эффективностью от 56,2% до 77,2% (Nestor-Bergmann et al., 2019; Wang et al., 2001).При этом большинство установок для растяжения (особенно коммерческих) ориентированы на деформации субстрата, не превышающие 20% (StrexCell, 2018; NanoSurface, 2018). Для обеспечения воспроизводимости растяжения субстрата, осуществляемого установкой, может потребоваться детальный контроль процесса растяжения. Так, исследования по воздействию циклического растяжения на клетки требуют высокой повторяемости позиционирования в каждом из циклов растяжения, а исследования физиологически значимых деформаций сопряжены с крайне низкими скоростями деформации субстрата (порядка единиц мкм/сек). Эти задачи требуют возможности разместить на установке дополнительные электронные устройства для высокоточного контроля работы актуатора. Одновременно, текущий уровень исследований может потребовать применение методик для оценки механических свойств исследуемых объектов.
Техническим результатом заявленного изобретения является обеспечение универсальности использования установки и повышении ее технологичности за счет компактного и симметричного дизайна, невысокой цены изготовления, возможности использования на микроскопах различных производителей, широкого диапазона амплитуды деформации субстрата (не менее 150%), возможности конфигурировать узлы установки, в том числе форм-фактор используемого субстрата и размещаемые электронные устройства, под нужды конкретного эксперимента.
Заявленный технический результат достигается посредством создания установки для высокоточного одноосевого растяжения эластичных субстратов для культивирования клеток и эмбриональных тканей, выполненной с возможностью установки на микроскоп, содержащей адаптер-основание, две соосные системы микропозиционирования, при этом адаптер-основание выполнен с геометрическими размерами, обеспечивающими совместимость с различными микроскопами с универсальным гнездом 160×110 мм, каждая система микропозиционирования состоит из независимо управляемого линейного шагового актуатора и системы линейного перемещения, присоединенной к штоку актуатора, и состоящей из двух параллельных рельс на каждый из которых смонтирована одна каретка таким образом, что на обеих каретках размещается крепежный модуль, на который устанавливаются сменные крепления для субстрата для культивирования клеток и эмбриональных тканей, установка снабжена печатной платой с разъемами для подключения двух линейных шаговых актуаторов и кабелем для подключения к управляющему блоку.
В частном варианте выполнения крепление для субстрата для культивирования клеток и эмбриональных тканей состоит из неподвижной части, которая фиксируется на крепежном модуле и съемной части, которая фиксируется на неподвижной части крепления.
В частном варианте выполнения крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде миниатюрных тисков для ультратонкой эластичной пленки, в которых в качестве неподвижной части используется неподвижная губка с резьбовыми отверстиями, а в качестве съемной части - съемная губка, в которую вмонтированы несъемные винты для фиксации съемной губки на неподвижной губке через резьбовые отверстия.
В частном варианте выполнения миниатюрные тиски фиксируют боковой участок вдоль каждого из двух ребер пленки, параллельных направлению растяжения, ортогонально к остальной поверхности и таким образом создают бортики на протяжении всей длины пленки.
В частном варианте выполнения крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде держателя для инкубационной камеры с двумя вертикальными штифтами, в котором в качестве неподвижной части крепления для субстрата используется неподвижная губка с резьбовыми отверстиями и отверстиями под штифты, а в качестве съемной части - съемная губка, в которую вмонтированы несъемные винты для фиксации съемной губки на неподвижной губке через резьбовые отверстия и два штифта для фиксации инкубационной камеры.
В частном варианте выполнения крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде держателя для инкубационной камеры с одним горизонтальным штифтом, в котором в качестве неподвижной части крепления для субстрата используется неподвижная губка, оборудованная направляющими для одного горизонтального штифта для фиксации инкубационной камеры, а съемная часть фиксирует штифт в неподвижной губке и предотвращает его смещение.
В частном варианте выполнения установка снабжена четырьмя оптическими переключателями.
В частном варианте выполнения установка снабжена двумя инкрементальными энкодерами, подключенными к разъемам на печатной плате.
Заявленное изобретение проиллюстрировано следующими изображениями:
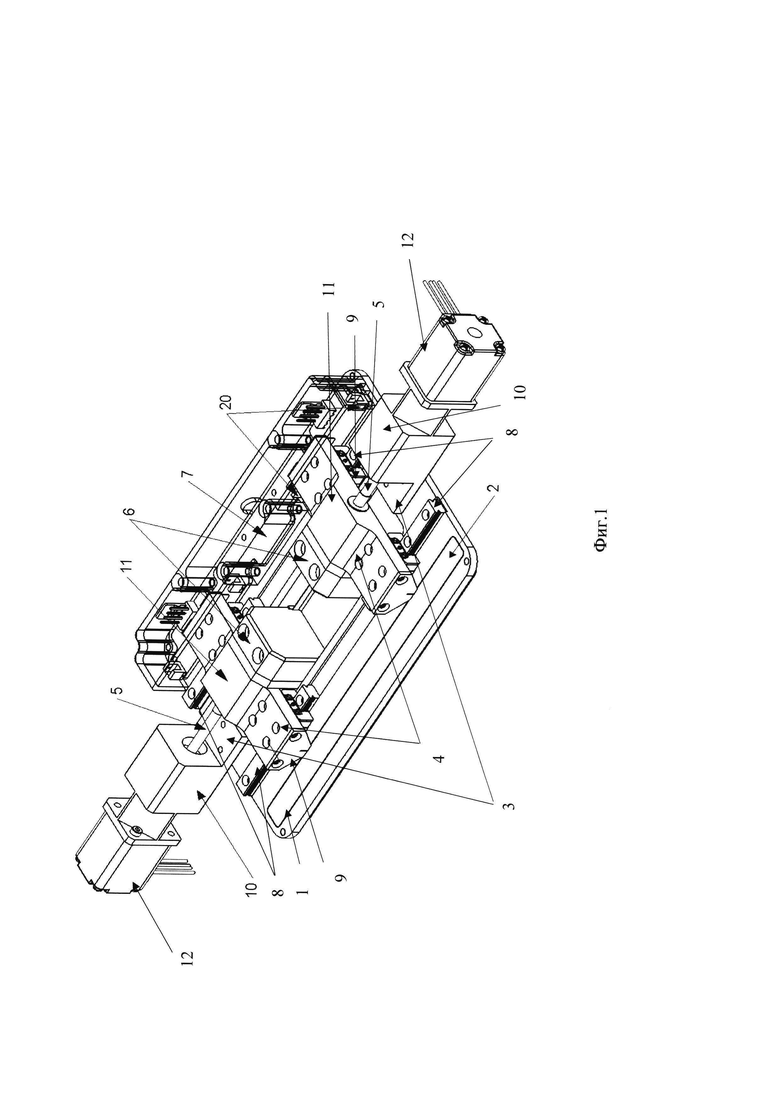
Фиг. 1 - общий вид установки для высокоточного одноосевого растяжения эластичных субстратов для культивирования клеток и эмбриональных тканей;
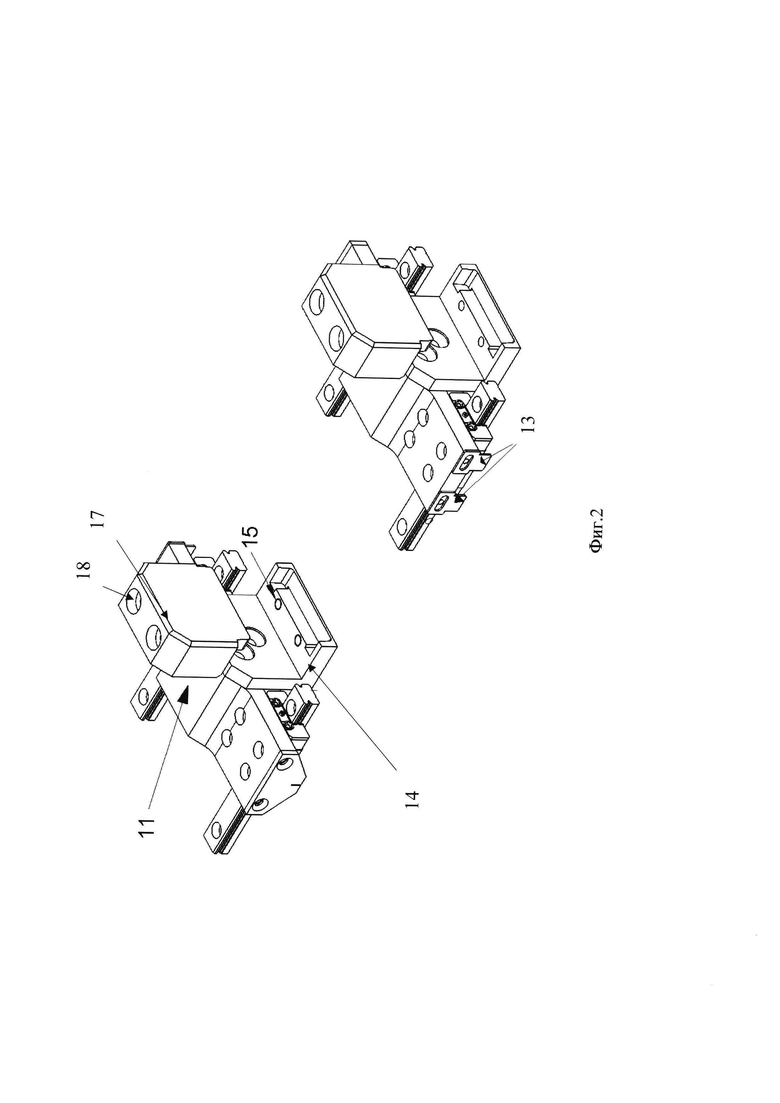
Фиг. 2 - общий вид системы линейного перемещения с креплением для ультратонкой пленки;
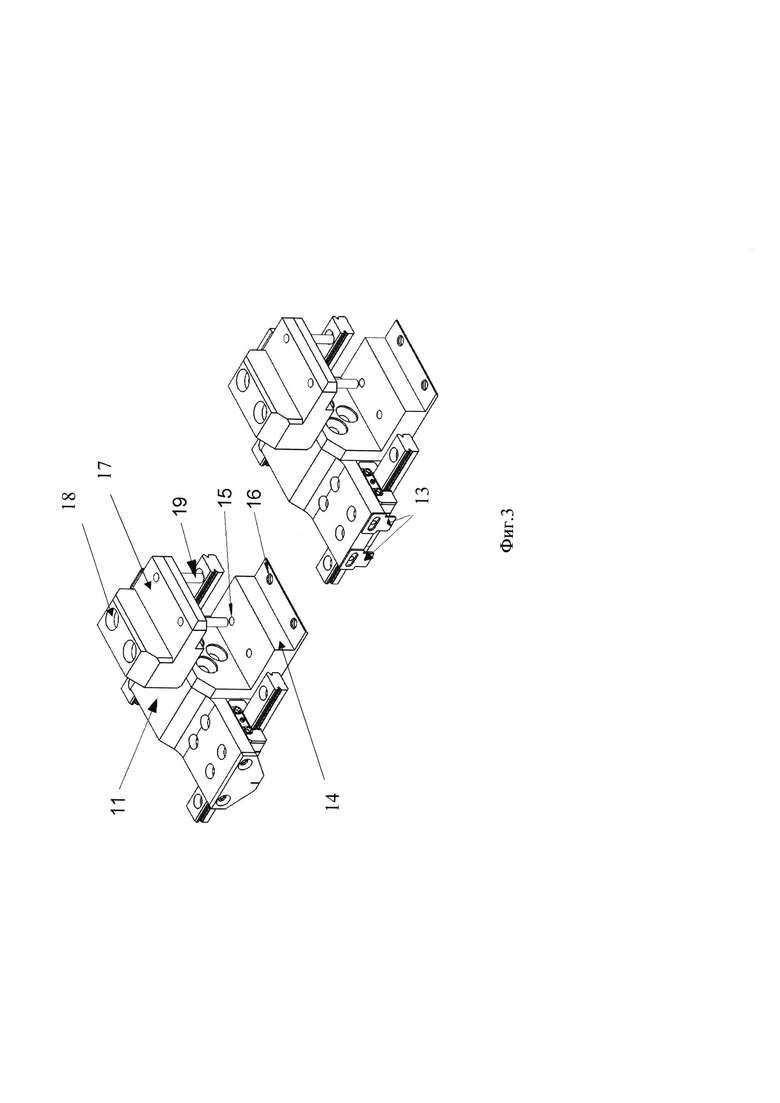
Фиг. 3 - общий вид системы линейного перемещения с креплением для инкубационной камеры.
Позиции на фиг. 1-3 обозначают следующее:
1 - адаптер-основание;
2 - указатель с метрической шкалой;
3 - система микропозиционирования;
4 - система линейного перемещения;
5 - шток актуатора;
6 - сменные крепления для субстрата (миниатюрные тиски или держатель для инкубационной камеры);
7 - печатная плата;
8 - рельс;
9 - каретка;
10 - кронштейн;
11 - крепежный модуль («стол»);
12 - актуатор;
13 - шторка для инициации срабатывания оптического переключателя;
14 - неподвижная часть крепления для субстрата;
15 - резьбовое отверстие для съемной губки;
16 - отверстие под вертикальный штифт;
17 - съемная часть крепления для субстрата;
18 - несъемный винт;
19 - вертикальный штифт;
20 - оптический переключатель.
Данное изобретение представляет собой компактную установку для одноосевого растяжения субстрата для культивирования клеток и эмбриональных тканей (далее - «установка для растяжения»). Высокая степень компактности достигается за счет использования в конструкции устройства шаговых двигателей типоразмера 8 по стандарту NEMA ICS 16-2001 и линейных рельсовых направляющих типоразмера 7. Дополнительной целью данного изобретения было создание установки с конфигурируемыми узлами, которая бы поддерживала использование различных форм-факторов субстрата для культивации, а также возможность разместить на установке для растяжения дополнительные электронные устройства.
Изделие состоит из адаптера-основания, на который смонтированы две соосные системы микропозиционирования и печатная плата для интеграции выводов электронных компонентов в единый кабель. Каждая система микропозиционирования состоит из независимо управляемого актуатора и системы линейного перемещения, присоединенной к штоку актуатора. Система линейного перемещения несет сменные крепления для различных исполнений субстрата для культивирования клеток. Провода от актуаторов и вспомогательных устройств интегрируется в единый кабель с помощью печатной платы.
Размеры адаптера-основания идентичны таковым у адаптера Zeiss «Universal mounting frame К», поэтому установка полностью совместима с микроскопами Zeiss и иных фирм с гнездом 160×110 мм. На адаптер-основание соосно монтируется две системы микропозиционирования, которые осуществляют растяжение субстрата в противоположных направлениях вдоль одной оси парой соосно смонтированных линейных шаговых актуаторов закрытого типа. Каждый из актуаторов установлен в кронштейн (спроектированный для двигателей типоразмера 8 по стандарту NEMA) и затем присоединен к отдельной системе линейного перемещения. Система линейного перемещения состоит из пары параллельных рельс, на каждый из которых смонтирована одна каретка. Таким образом, в состав одной системы линейного перемещения входит пара кареток, на которую монтируется специальный крепежный модуль («стол»), используемый для установки сменных креплений для субстрата для культивирования. Степень выдвижения штока актуатора, и, т.о., позиция кареток, может контролироваться как визуально с помощью прикрепленного к каретке указателя, сопряженного с метрической шкалой, находящейся сбоку, вдоль одного из рельс, так и электронным методом через систему с обратной связью на основе энкодера, устанавливаемого на актуатор. Метрическая шкала позволяет приблизительно оценить позицию каретки, в то время как энкодер может использоваться при необходимости оценки позиции с высокой точностью. Контроль позиции каретки с высокой точностью может быть необходим, например, в случае экспериментов с циклическим растяжением, где необходимо обеспечить высокую повторяемость позиционирования, а также в экспериментах с длительным растяжением, в которых скорость перемещения каретки может быть крайне низкой, что значительно затрудняет визуальный контроль позиции с помощью метрической шкалы. Так как подвижная часть линейной направляющей (две каретки и смонтированный на них крепежный модуль) приводится в движение актуатором напрямую, точность позиционирования и развиваемое усилие ограничены только разрешением актуатора и усилием на штоке.
Для размещения субстрата для культивирования, данное изобретение предлагает два типа креплений. Крепление первого типа представляет собой миниатюрные тиски для сверхтонкой эластичной пленки и состоит из неподвижной губки, которая фиксируется на крепежном модуле линейной направляющей и содержит резьбовые отверстия для присоединения съемной губки. В съемную губку вмонтированы 2 несъемных винта, которые вкручиваются в соответствующие резьбовые отверстия в неподвижной губке и при затягивании прижимают губки друг к другу. Такой метод крепления субстрата делает возможным использование механобиологических методик, аналогичных той, что описана подразделением клеточной биологии и онкологии Института Кюри (Carpi and Piel, 2014). Кратко, после монтирования пленки в крепления для субстрата, на нее устанавливают бортики из PDMS и герметизируют соединение силиконовой смазкой, создавая, таким образом, инкубационную камеру. Максимальная амплитуда деформации в случае методики данного типа определяется геометрией субстрата. Авторы изобретения предполагают использование пленки длиной 50 мм в связи с особенностями конструкции микроскопа. При максимальном расстоянии между губками обоих креплений в 78 мм, максимально возможная деформация составляет 150%. Однако, используя пленку длиной 39 мм можно добиться 200% деформации субстрата.
Главными преимуществами этой методики являются ее доступность (1 пленка размером 5.0"×5.0" обеспечивает субстрат для 8 экспериментов), а также высокая равномерность деформации вследствие того, что края пленки в подобных тисках фиксируются на протяжении всей своей длины. Кроме того, в случае подобной инкубационной камеры деформации в ходе растяжения противодействует только пленка, поэтому растяжение требует крайне незначительного усилия. Так как в этом случае шток актуатора практически не испытывает сопротивления со стороны субстрата, появляется возможность снять питание с обмоток шаговых актуаторов в режиме удержания и полностью исключить вероятность нагрева двигателя. Ключевым недостатком этой методики является потенциальный риск протекания камеры при высоких деформациях из-за рассеивания смазки. Чтобы предотвратить утечку раствора при протекании камеры, дизайн тисков выполнен таким образом, чтобы они фиксировали боковой участок шириной 3 мм вдоль каждого из двух ребер пленки, параллельных направлению растяжения, ортогонально к остальной поверхности, создавая бортики на протяжении всей длины пленки. Сами тиски могут быть изготовлены из нержавеющей стали, что предотвратит коррозию из-за контакта с физиологическим раствором, а также допускает возможность стерилизации а автоклаве.
Для того, чтобы полностью устранить вероятность протекания инкубационной камеры, изобретение содержит второй тип крепления. Этот вариант крепления позволяет использовать коммерчески доступные инкубационные камеры, не содержащие соединений на силиконовой смазке, и потому исключающие риск протечки. Крепление для инкубационной камеры состоит из неподвижной части, которая фиксируется на крепежном модуле линейной направляющей и содержит резьбовые отверстия для прикрепления съемной части, которая несет два вертикальных штифта, фиксирующие инкубационную камеру через соответствующие каналы в стенке камеры; штифты съемной части совмещаются с двумя соответствующими отверстиями в неподвижной части, и таким образом обеспечивается фиксация инкубационной камеры. Подобный метод крепления подходит для большинства коммерческих камер, однако, для достижения наиболее равномерной деформации рабочей области камеры может потребоваться внесение изменения в дизайн камеры (Cruz et al., 2019). Возможность замены креплений позволяет использовать усовершенствованные методы удержания субстрата, как только информация о них станет доступной, без внесения значительных изменений в конструкцию установки в целом. Возможность конфигурировать дизайн креплений, например, позволяет использовать крепление в виде единичного горизонтального штифта, которое предотвращает концентрацию нагрузки и потому приводит к более равномерной деформации (Morita et al., 2019). При использовании камеры с длиной рабочей области (в направлении растяжения) 20 мм можно добиться 200% деформации субстрата.
Печатная плата используется для интеграции проводов от электронных компонентов в единый кабель. Кроме интеграции вывода от актуаторов и вспомогательных компонентов (датчиков конца рабочего хода, выключателей исходного положения или энкодеров), печатная плата также выступает платформой для размещения внешних электронных устройств, в случае данного изобретения - ограничителей хода. В данном изобретении ограничители хода представлены парой оптических переключателей Kingbright KRB031 (в исполнении под печатную плату) на каждый актуатор для ограничения хода штока в обоих направлениях. Это предотвращает как соскальзывание кареток с рельс, так и столкновение с кронштейном актуатора (что может привести к заклиниванию актуатора).
Таким образом, изобретение обладает компактным симметричным дизайном и поддерживает применение нескольких типов деформируемых субстратов и соответствующих способов их крепления на установку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КУЛЬТИВИРОВАНИЯ КЛЕТОК | 2012 |
|
RU2612915C2 |
| СПОСОБЫ, ИНСТРУМЕНТЫ И МАТЕРИАЛЫ ДЛЯ ТРАНСПЛАНТАЦИИ ЗРЕЛЫХ КЛЕТОК ХРЯЩЕВОЙ ТКАНИ | 1999 |
|
RU2244521C2 |
| СРЕДСТВО ДЛЯ ИЗМЕНЕНИЯ СКОРОСТИ РОСТА ИЛИ РЕПРОДУКЦИИ КЛЕТОК, СПОСОБ ЕГО ПОЛУЧЕНИЯ, СПОСОБ СТИМУЛЯЦИИ ЗАЖИВЛЕНИЯ РАН ИЛИ ЛЕЧЕНИЯ ОЖОГОВ, СПОСОБ КОРРЕКЦИИ КОСМЕТИЧЕСКОГО ДЕФЕКТА, СПОСОБ ИНГИБИРОВАНИЯ СТАРЕНИЯ КОЖИ И СПОСОБ СТИМУЛЯЦИИ РОСТА ВОЛОС | 2000 |
|
RU2280459C2 |
| Машинные тиски | 1977 |
|
SU818848A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| УСТРОЙСТВО И СПОСОБ МАГНИТНОЙ ФАБРИКАЦИИ | 2019 |
|
RU2746171C2 |
| Хирургический зажим для лазерного рассечения ткани | 1990 |
|
SU1725856A1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПРОГРЕССИРУЮЩЕЙ И ОСЛОЖНЕННОЙ МИОПИИ | 2012 |
|
RU2494711C1 |
| СПОСОБ ЛЕЧЕНИЯ АТРОФИИ ЗРИТЕЛЬНОГО НЕРВА РАЗЛИЧНОЙ ЭТИОЛОГИИ | 2012 |
|
RU2494712C1 |
Изобретение относится к области биотехнологии, в частности к оборудованию для проведения механобиологических экспериментов, в ходе которых обеспечивается возможность осуществить контролируемую деформацию клеток или эмбриональных тканей. Установка выполнена с возможностью установки на микроскоп, содержит адаптер-основание и две соосные системы микропозиционирования. Адаптер-основание выполнен с геометрическими размерами, обеспечивающими совместимость с различными микроскопами с универсальным гнездом 160-110 мм. Каждая система микропозиционирования состоит из независимо управляемого линейного шагового актуатора и системы линейного перемещения. Последняя присоединена к штоку актуатора и имеет два параллельно расположенных рельса. На каждом рельсе смонтирована одна каретка. Каретки выполнены с возможностью размещения на обеих каретках крепежного модуля. На модуль устанавлены сменные крепления для субстрата для культивирования клеток и эмбриональных тканей. Установка снабжена печатной платой с разъемами для подключения двух линейных шаговых актуаторов и кабелем для подключения к управляющему блоку. Изобретение обеспечивает достижение технического результата, заключающегося в повышении качества и надежности с обеспечением широкого диапазона амплитуды деформации субстрата, универсальности использования и технологичности за счет компактного и симметричного дизайна, возможности использования на микроскопах различных производителей, а также возможности конфигурировать узлы установки, в том числе форм-фактор используемого субстрата и размещаемые электронные устройства, под нужды конкретного эксперимента, 7 з.п. ф-лы, 3 ил.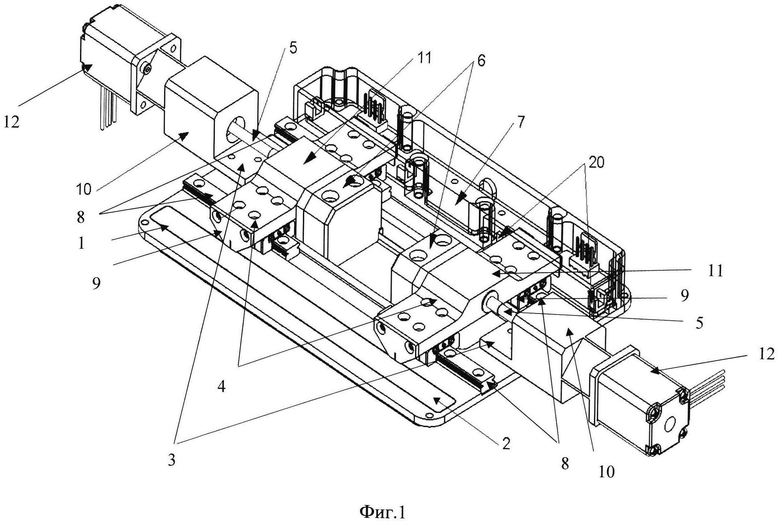
1. Установка для высокоточного одноосевого растяжения эластичных субстратов для культивирования клеток и эмбриональных тканей, выполненная с возможностью установки на микроскоп, содержащая адаптер-основание, две соосные системы микропозиционирования, отличающаяся тем, что адаптер-основание выполнен с геометрическими размерами, обеспечивающими совместимость с различными микроскопами с универсальным гнездом 160×110 мм, каждая система микропозиционирования состоит из независимо управляемого линейного шагового актуатора и системы линейного перемещения, присоединенной к штоку актуатора и состоящей из двух параллельных рельс, на каждый из которых смонтирована одна каретка таким образом, что на обеих каретках размещается крепежный модуль, на который устанавливаются сменные крепления для субстрата для культивирования клеток и эмбриональных тканей, установка снабжена печатной платой с разъемами для подключения двух линейных шаговых актуаторов и кабелем для подключения к управляющему блоку.
2. Установка по п. 1, отличающаяся тем, что крепление для субстрата для культивирования клеток и эмбриональных тканей состоит из неподвижной части, которая фиксируется на крепежном модуле и съемной части, которая фиксируется на неподвижной части крепления.
3. Установка по п. 2, отличающаяся тем, что крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде миниатюрных тисков для ультратонкой эластичной пленки, в которых в качестве неподвижной части используется неподвижная губка с резьбовыми отверстиями, а в качестве съемной части - съемная губка, в которую вмонтированы несъемные винты для фиксации съемной губки на неподвижной губке через резьбовые отверстия.
4. Установка по п. 3, отличающаяся тем, что миниатюрные тиски фиксируют боковой участок вдоль каждого из двух ребер пленки, параллельных направлению растяжения, ортогонально к остальной поверхности и таким образом создают бортики на протяжении всей длины пленки.
5. Установка по п. 2, отличающаяся тем, что крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде держателя для инкубационной камеры с двумя вертикальными штифтами, в котором в качестве неподвижной части крепления для субстрата используется неподвижная губка с резьбовыми отверстиями и отверстиями под штифты, а в качестве съемной части - съемная губка, в которую вмонтированы несъемные винты для фиксации съемной губки на неподвижной губке через резьбовые отверстия и два штифта для фиксации инкубационной камеры.
6. Установка по п. 2, отличающаяся тем, что крепление для субстрата для культивирования клеток и эмбриональных тканей выполнено в виде держателя для инкубационной камеры с одним горизонтальным штифтом, в котором в качестве неподвижной части крепления для субстрата используется неподвижная губка, оборудованная направляющими для одного горизонтального штифта для фиксации инкубационной камеры, а съемная часть фиксирует штифт в неподвижной губке и предотвращает его смещение.
7. Установка по любому из пп. 1-6, отличающаяся тем, что она снабжена четырьмя оптическими переключателями.
8. Установка по любому из пп. 1-6, отличающаяся тем, что она снабжена двумя инкрементальными энкодерами, подключенными к разъемам на печатной плате.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 20120219981 A1, 30.08.2012 | |||
| CN 10165773, 20.06.2017 | |||
| УСТАНОВКА ДЛЯ КУЛЬТИВИРОВАНИЯ КЛЕТОК И ТКАНЕЙ | 0 |
|
SU271727A1 |

