Область техники, к которой относится изобретение
Настоящее изобретение относится к способу контроля состояния изнашиваемого элемента рельсового транспортного средства. Настоящее изобретение также относится к системе контроля состояния изнашиваемого элемента рельсового транспортного средства.
Уровень техники
Современные поезда, работающие в современных железнодорожных системах, сталкиваются с такими сложными задачами, как движение с высокой скоростью, в течение длительного времени и на большие расстояния, а также с необходимостью иметь длительный срок службы. Следовательно, поезд и его компоненты должны выдерживать все виды рабочих условий, таких как частые изменения скорости, напр., из-за остановок или прохождения железнодорожной станции, остановок поезда у знаков остановки, ограничений скорости, напр. на мостах или в туннелях, погодные условия и, следовательно, изменения температуры. Таким образом, наблюдение за поездом и особенно за подверженными нагрузкам компонентами поезда имеет важное значение для обеспечения надежной работы железнодорожной системы.
Из-за нагрузки, такой как физическое трение о рельсы, повреждаются рабочие компоненты, такие как, например, изнашиваемый элемент, такой как колесо или компоненты тормозного узла (напр., тормозной накладки или тормозной колодки), могут возникнуть повреждения или износ рельсовой тележки, например, деформация, истирание или трещины. Следовательно, такие параметры, как профиль колеса, диаметр колеса, ширина фланца колеса, высота фланца колеса или толщина накладки, могут изменяться со временем. Эти изменения влияют на динамическую характеристику рельсового транспортного средства и даже могут влиять на безопасность рельсового транспортного средства. Поэтому параметры компонентов регулярно измеряют. Если контролируемый параметр достигает некоторого критического значения, то необходимо восстановить профиль изнашиваемого элемента. Кроме того, из-за большой рабочей нагрузки и/или из-за возможного процесса восстановления профиля параметр изнашиваемого элемента может быть изменен до такой степени, что необходимо заменить изнашиваемый элемент.
Регулярные проверки необходимы для мониторинга возможного повреждения или износа профиля изнашиваемых элементов. Эти проверки включают в себя как визуальные осмотры, так и измерения параметров, таких как диаметр или профиль колеса. Каждая проверка требует больших усилий с точки зрения времени простоя транспортного средства и затрат на выполнение технического обслуживания. Однако они необходимы для нахождения оптимального момента времени для восстановления профиля или замены изнашиваемого элемента.
Первая цель настоящего изобретения заключается в том, чтобы предложить способ контроля состояния изнашиваемого элемента рельсового транспортного средства, с помощью которого можно устранить вышеупомянутые недостатки, и, в частности, предложить способ, который оптимизирует процесс обслуживания, который является более гибким, экономит время и затраты и не зависит от рабочей силы, как это известно из систем предшествующего уровня техники.
Кроме того, вторая цель изобретения заключается в том, чтобы предложить систему контроля, с помощью которой можно упростить определение состояния.
Сущность изобретения
Соответственно, в настоящем изобретении предложен способ контроля состояния изнашиваемого элемента рельсового транспортного средства.
Предлагается способ, который содержит по меньшей мере следующие этапы:
- определяют второе состояние изнашиваемого элемента, которое является следующим после первого состояния в хронологическом порядке состоянием, начиная с первого состояния изнашиваемого элемента, с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента,
- определяют первое выполнимое действие, выполняемое на изнашиваемом элементе, с использованием определенного второго состояния изнашиваемого элемента и по меньшей мере одного предварительно заданного условного критерия для изнашиваемого элемента,
- определяют результирующее третье состояние изнашиваемого элемента с использованием изменения состояния изнашиваемого элемента, где изменение состояния является результатом (является следствием) первого выполнимого действия, и
- еще раз определяют второе выполнимое действие, выполняемое на изнашиваемом элементе, с использованием результирующего третьего состояния изнашиваемого элемента и по меньшей мере одного предварительно заданного условного критерия для изнашиваемого элемента.
Благодаря предложенному в изобретении способу можно прогнозировать эволюцию профиля изнашиваемого элемента до проверки. Преимущественно, прогнозирование работает быстро. Поскольку обслуживающий персонал знает, насколько вероятно должен быть восстановлен профиль или даже заменен изнашиваемый элемент, можно более эффективно планировать работы по техобслуживанию. Кроме того, можно оптимизировать запас запасных частей, поскольку спрос на запасные части известен заранее. Это приводит к сокращению сроков поставки, снижению капитальных затрат благодаря более точной информации о том, сколько компонентов должно быть на складе. Более того, можно сократить рабочую силу во время техобслуживания. Кроме того, модель прогнозирования износа может использоваться для экономии времени и денег на, возможно, ненужных проверках, то есть частые проверки в депо сводятся к минимуму. Кроме того, снижается потребность в дополнительных дорогостоящих измерениях. Кроме того, может быть оказано положительное влияние на устойчивость рельсового транспортного средства или его части, такой как вагон или тележка. Это обеспечивает высокую безопасность работы и комфорт пассажиров. Кроме того, предложенный в изобретении способ позволяет прогнозировать износ компонентов в сложной ситуации. Например, когда имеется сеть железнодорожных путей и множество поездов (намного больше по сравнению с ситуацией, когда один поезд движется по одной и той же дороге).
Даже если выбранный термин используется в единственном числе или в конкретной числовой форме в формуле изобретения и в описании, объем патента (заявки) не должен ограничиваться формой единственного числа или конкретной числовой формой. В объем изобретения также должно входить наличие более одной или множества конкретных структур.
В этом контексте предполагается, что "первое, второе и третье состояние" (или статус) обозначает конкретное состояние изнашиваемого элемента в выбранный момент времени. Момент времени второго состояния расположен после момента времени первого состояния, а момент времени третьего состояния - после моментов времени первого и второго состояний. Состояние изнашиваемого элемента может быть одинаковым для всех трех состояний, или в первом и втором состоянии, или во втором и третьем состоянии. Скорее всего, состояние изнашиваемого элемента отличается между первым и вторым состояниями. Таким образом, наиболее вероятно будет изменение состояния или различие в состоянии изнашиваемого элемента между первым состоянием и вторым состоянием.
Однако в зависимости от выполняемого действия (подробности см. ниже) состояние изнашиваемого элемента может отличаться или быть одинаковым между вторым и третьим состояниями. Следовательно, предполагается, что выражение "изменение состояния" означает разницу между состоянием изнашиваемого элемента во втором состоянии и состоянием изнашиваемого элемента в третьем состоянии. Как указано выше, в зависимости от выполняемого действия также может отсутствовать различие состояний. Кроме того, фразу "является следствием" следует также понимать как "в результате" или "получается из". Фразу "… критерий для…" также следует понимать как "…критерий в отношении…" или как "… критерий, относящийся к…".
Кроме того, обратите внимание, что третий этап (и, в свою очередь, четвертый этап) является теоретическим соображением, полученным независимо от возможности выполнения первого выполнимого действия. На этом этапе оценивают возможные результаты первого выполнимого действия.
Изнашиваемый элемент может представлять собой любой элемент, который подвержен повреждению или, в частности, износу, допустимый специалистом в данной области техники. Изнашиваемый элемент может представлять собой, например, элемент, выбранный из группы, состоящей из: колеса, тормозной колодки, тормозного башмака, винта, пружины, замка или центрального механизма. Наиболее предпочтительно это может быть колесо.
Выражение "рельсовое транспортное средство" обозначает любое транспортное средство, допустимое для специалиста в данной области техники, которое вследствие физического взаимодействия с трассой, особенно предварительно заданной трассой, ограничено этой трассой или траекторией. Под физическим взаимодействием/соединением следует понимать соединение с геометрическим замыканием, электрическое соединение или магнитное соединение. Физическое соединение может быть разъединяемым. В этом контексте выражение "предварительно заданная трасса" обозначает заранее существующую, построенную человеком трассу или путь, содержащую выбранное средство для построения или формирования трассы, например, рельса или кабеля. Предварительно заданная трасса также может упоминаться как трасса в последующем тексте. Предпочтительно, предварительно заданная трасса представляет собой железнодорожный путь, такой как магистраль в Великобритании, Германии или России.
Транспортное средство может представлять собой поезд, метрополитен, трамвай или троллейбус. Предпочтительно, рельсовое транспортное средство может быть поездом. Следовательно, способ может быть применен, когда несколько транспортных средств движутся по одной и той же трассе. Преимущественно, рельсовое транспортное средство или поезд может представлять собой высокоскоростной поезд. Таким образом, способ может быть использован для сети, в которой высокий уровень безопасности является существенным и необходимым. Рельсовое транспортное средство в последующем тексте также может упоминаться как транспортное средство или поезд. В случае если транспортное средство представляет собой поезд, изнашиваемым элементом предпочтительно является колесо поезда.
Выполнимое действие может быть любым действием или активностью, выполняемым на изнашиваемом элементе, допустимом для специалиста в данной области техники. Однако предпочтительно первое и/или второе и/или третье и/или дополнительное первое выполнимое действие представляет собой восстановление профиля, замену изнашиваемого элемента или бездействие. Следовательно, изнашиваемый элемент может быть соответствующим образом обработан. Бездействие также следует понимать как отсутствие действия. Действие может быть выбрано из списка, включающего выбор заранее определенных действий. Со ссылкой на перекрестные ссылки выше. В случае если определение первого выполнимого действия дает бездействие, то состояние изнашиваемого элемента остается неизменным между вторым и третьим состояниями.
Алгоритм машинного обучения может представлять собой любой алгоритм, осуществимый специалистом в данной области техники, и может быть выбран из группы, состоящей из следующего: обучение с учителем, частичное обучение, обучение без учителя, обучение с подкреплением и активное обучение. Предпочтительно алгоритм представляет собой алгоритм обучения с учителем. Алгоритмы обучения с учителем пытаются определить функцию отображения между входными данными и определенными целевыми переменными. Алгоритмы обучения с учителем можно разделить на две основные категории: Алгоритмы классификации имеют целевые переменные, которые являются категориальными и имеют метки классов (напр., "требуется восстановление профиля колеса" или "восстановление профиля колеса не требуется"). Алгоритмы регрессии имеют целевые переменные, которые являются переменными с непрерывными значениями (напр., диаметр колеса).
В предпочтительном варианте осуществления предложенного в изобретении способа алгоритм машинного обучения представляет собой алгоритм обучения с учителем и, в частности, алгоритм автоматической регрессии, и, в частности, обучаемый обычным методом наименьших квадратов (OLS). Следовательно, модель является простой и может быть легко обучена.
Благодаря алгоритму машинного обучения, настраивают модель прогнозирования, и определяют состояние изнашиваемого элемента посредством определения зависящего от состояния параметра изнашиваемого элемента. Таким образом, способ содержит дополнительный этап, на котором: Определяют по меньшей мере один зависящий от состояния параметр изнашиваемого элемента с помощью алгоритма автоматической регрессии с использованием обычной модели наименьших квадратов (OLS).
Предварительно заданный зависящий от состояния критерий может быть любым критерием, допустимым для специалиста в данной области. Преимущественно, по меньшей мере, один предварительно заданный зависящий от состояния критерий представляет собой эксплуатационный предел зависящего от состояния параметра. Следовательно, модель работает с четко определенными критериями безопасности. Этот предел может относиться к максимальному или минимальному значению зависящего от состояния параметра или к максимальной или минимальной разнице между параметрами изнашиваемого элемента и связанных с ним или зависимых от него структур, таких как дополнительные изнашиваемые элементы или элементы, отличные от изнашиваемого элемента, являющиеся частями узла более высокого уровня, содержащего изнашиваемый элемент. Предварительно заданный зависящий от состояния критерий, упомянутый на втором и четвертом этапах способа, может представлять собой один и тот же предварительно заданный зависящий от состояния критерий или разные предварительно заданные зависящие от состояния критерии изнашиваемого элемента.
Более того, предусмотрено, что способ содержит дополнительный этап, на котором: проверяют, соответствует ли определенное изменение состояния изнашиваемого элемента по меньшей мере одному критерию правдоподобия, причем изменение состояния основано по меньшей мере на одном измеренном или определенном зависящем от состояния параметре, относящемся к изнашиваемому элементу. Следовательно, по меньшей мере один измеренный или определенный зависящий от состояния параметр может быть проверен с точки зрения его согласованности и надежности.
Зависящий от состояния параметр может представлять собой исторический параметр из предыдущей проверки или измерения изнашиваемого элемента. Поскольку измерения на изнашиваемом элементе, таком как колесо, в депо могут содержать много несоответствий, то перед обработкой данных необходимо убедиться, что данные согласованы и очищены от ошибок и неправильных измерений.
Такой этап проверки также может быть использован для проверки самой модели. Следовательно, изменение состояния будет относиться к изменению состояния изнашиваемого элемента между первым и вторым состояниями или между вторым и третьим состояниями. В этом случае основой будут (две) рассчитанные модели.
Критерии зависят от исторических данных или последнего состояния или выполненного действия над исследуемым изнашиваемым элементом или его конкретным параметром. Например, если изнашиваемым элементом является колесо, а исторические данные являются результатом измерения неизмененного колеса с не восстановленным профилем, то могут быть выполнены следующие критерии:
- Диаметр колеса не может увеличиться.
- Высота гребня/фланца не может уменьшаться.
- Можно быть обнаружено одновременное уменьшение диаметра и профиля раскатанного слоя.
- Постоянное уменьшение диаметра.
- Постоянное увеличение раскатанного слоя.
Например, если изнашиваемым элементом является колесо, а исторические данные являются результатом измерения колеса с восстановленным профилем после последнего измерения, то могут быть выполнены следующие критерии:
- Быстрое уменьшение диаметра колеса.
- Быстрое уменьшение раскатанного слоя.
Например, если изнашиваемым элементом является колесо, а исторические данные являются результатом измерения колеса, замененного после последнего измерения, то могут быть выполнены следующие критерии:
- Быстрое увеличение диаметра колеса.
- Быстрое уменьшение раскатанного слоя.
Кроме того, предпочтительно, чтобы способ содержал дополнительный этап, на котором: Выбирают обучающие данные для алгоритма машинного обучения с использованием хотя бы одного критерия правдоподобия. Таким образом, используются только достоверные данные или измерения.
В еще одном варианте осуществления изобретения упомянутый способ включает в себя дополнительный этап, на котором: Выполняют способ для определения первого и/или второго и/или третьего и/или дополнительного первого выполнимого действия в качестве решения ДА/НЕТ с использованием модели принятия решения. Следовательно, можно легко получить результат. Реальные измерения могут быть очень зашумленными. Таким образом, при использовании этой модели принятия решения результат будет менее зашумленным или не зашумленным по сравнению с реальными измерениями. Модель принятия решения относится как минимум к одному зависящему от состояния параметру.
Кроме того, предпочтительно, чтобы способ содержал дополнительный этап, на котором: Отображают изменение состояния в модели принятия решений как решение ДА/НЕТ. Следовательно, изменение может быть представлено простым способом. Предпочтительно, модель принятия решения представляет собой слой алгоритма обучения или искусственной нейронной сети. Входные данные слоя - это прогнозируемое значение(я) из модели, а выходные данные - решение ДА/НЕТ о действии, заключающемся в восстановлении профиля/замене.
В соответствии с предпочтительным вариантом способ содержит дополнительный этап, на котором: Описывают первое и/или второе и/или третье состояние по меньшей мере одним зависящим от состояния параметром. Следовательно, условие задано четко.
Зависящий от состояния параметр может быть любым параметром, допустимым для специалиста в данной области техники, который может определять или характеризовать часть/секцию/область изнашиваемого элемента. Преимущественно, зависящий от состояния параметр является параметром, выбранным из группы, состоящей из следующего: Диаметр, высота фланца, ширина фланца, ширина буртика фланца, уклон буртика фланца, канавка, раскатанный слой, ширина протектора, площадь протектора, рабочая нагрузка на изнашиваемый элемент, пройденный пробег изнашиваемого элемента, толщина тормозной колодки или башмака, возраст изнашиваемого элемента, профиль изнашиваемого элемента, неровность изнашиваемого элемента. Раскатанный слой также может называться "раскатанным железом" или упрочняющей поверхностью, деформируемой поверхностью, рабочей поверхностью или поверхностью, подверженной усталостному упрочнению.
Модель может быть основана только на одном зависящем от состояния параметре и, следовательно, на одномерной системе. Для каждого зависящего от состояния параметра будет запущена отдельная модель. Преимущественно, модель представляет собой многомерную систему, отображающую несколько зависящих от состояния параметров одновременно.
В соответствии с еще одним аспектом изобретения способ содержит дополнительные этапы, на которых: Определяют дополнительное второе состояние дополнительного изнашиваемого элемента, которое является хронологически следующим состоянием после дополнительного первого состояния, начиная с дополнительного первого состояния дополнительного изнашиваемого элемента, используя алгоритм машинного обучения, и еще раз определяют последующее выполняемое действие, выполняемое на дополнительном изнашиваемом элементе с использованием результирующего дополнительного второго состояния дополнительного изнашиваемого элемента, третьего состояния изнашиваемого элемента и, по меньшей мере, одного предварительно заданного зависящего от состояния критерия для дополнительного изнашиваемого элемента. Таким образом, можно избежать ненадежности из-за несоответствия между изнашиваемыми элементами.
"Последующее выполняемое действие" также может называться "зависимым выполняемым действием". Здесь изнашиваемый элемент может быть назван первым изнашиваемым элементом, а дополнительный изнашиваемый элемент - вторым изнашиваемым элементом.
Действие, которое может быть выполнено на (первом) изнашиваемом элементе, может повлиять на дальнейшую процедуру, рассчитанную или выполненную для соответствующих конструкций или для дополнительного (второго) изнашиваемого элемента. Предпочтительно, чтобы (первый) изнашиваемый элемент и дополнительный (второй) изнашиваемый элемент являлись частями общей структуры или узла более высокого уровня. Таким образом, (первый) и дополнительный (второй) изнашиваемый элемент могут зависеть друг от друга. Такой общей конструкцией или узлом более высокого уровня может быть, например, колесная пара, тележка, тормозной узел или вагон.
В случае если первое выполнимое действие является бездействием, способ может содержать, в соответствии с дополнительной реализацией изобретения, дополнительные этапы, на которых: Определяют результирующее четвертое состояние изнашиваемого элемента, которое является хронологически последующим состоянием после второго состояния, начиная со второго состояния изнашиваемого элемента, используя алгоритм машинного обучения, который представляет хронологическое поведение изнашиваемого элемента, и еще раз определяют третье выполнимое действие, выполняемое на изнашиваемом элементе с использованием результирующего четвертого состояния изнашиваемого элемента и, по меньшей мере, одного предварительно заданного зависящего от состояния критерия для изнашиваемого элемента. Следовательно, можно оценить необходимость восстановления профиля или замены в следующий раз. Зная износ из нескольких проверок, можно более эффективно запланировать работы, которые необходимо будет выполнить во время проверки. Кроме того, получение необходимых запасных частей также может быть запланировано заранее.
Предпочтительно, определение выполняют только тогда, когда результирующее второе состояние имеет предварительно заданное расстояние до предварительно заданного зависящего от состояния критерия. Другими словами, определяют, насколько далеко определенное значение находится от значения, которое будет превышать зависящий от состояния критерий или критическое значение.
Таким образом, критические значения могут быть заданы для каждого изнашиваемого элемента или, например, его профиля. Достижение критического значения может подразумевать восстановление профиля или замену элемента. Если параметры элемента близки к достижению критического(их) значения(й), то важно понять, будут ли параметры элемента уже выходить за эти критические значения при следующей проверке. Возможно, лучше выполнить восстановление профиля во время текущей проверки или дождаться следующей проверки. Это может сэкономить материал на элементе, и элемент будет все еще безопасным до следующей проверки. Только во время следующей проверки будет выполнено восстановление профиля (во втором случае можно сэкономить, так как колесо будет использоваться дольше).
Изобретение также относится к системе контроля состояния изнашиваемого элемента рельсового транспортного средства.
Предполагается, что система контроля содержит по меньшей мере одно определяющее устройство для: определения второго состояния изнашиваемого элемента, которое является хронологически последующим состоянием после первого состояния, начиная с первого состояния изнашиваемого элемента, с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента, определения первого выполнимого действия, выполняемого на изнашиваемом элементе, с использованием определенного второго состояния изнашиваемого элемента и по меньшей мере одного предварительно заданного условного критерия для изнашиваемого элемента, определения результирующего третьего состояния изнашиваемого элемента, используя изменение состояния изнашиваемого элемента, причем изменение состояния является следствием первого выполнимого действия, и еще раз определяют второе выполнимое действие, выполняемое на изнашиваемом элементе с использованием результирующего третьего состояния изнашиваемого элемента и, по меньшей мере, одного предварительно заданного зависящего от состояния критерия для изнашиваемого элемента.
Благодаря предложенной в изобретении сущности можно прогнозировать эволюцию профиля изнашиваемого элемента до проверки. Преимущественно, прогнозирование работает быстро. Поскольку обслуживающий персонал знает, насколько вероятно, что должен быть восстановлен профиль или даже заменен изнашиваемый элемент, можно более эффективно планировать работы по техобслуживанию. Кроме того, можно оптимизировать запас запасных частей, поскольку спрос на запасные части известен заранее. Это приводит к сокращению сроков поставки, снижению капитальных затрат благодаря более точной информации о том, сколько компонентов должно быть на складе. Более того, можно сократить рабочую силу во время техобслуживания. Кроме того, модель прогнозирования износа может использоваться для экономии времени и денег на, возможно, ненужных проверках, то есть частые проверки в депо сводятся к минимуму. Кроме того, снижается потребность в дополнительных дорогостоящих измерениях. Кроме того, может быть оказано положительное влияние на устойчивость рельсового транспортного средства или его части, такой как вагон или тележка. Это обеспечивает высокую безопасность работы и комфорт пассажиров. Кроме того, предложенный в изобретении способ позволяет прогнозировать износ компонентов в сложной ситуации. Например, когда имеется сеть железнодорожных путей и множество поездов (намного больше по сравнению с ситуацией, когда один поезд движется по одной и той же дороге).
Система контроля может содержать компьютер и может быть расположена в центре управления железнодорожной системой и/или управляться им. Кроме того, список возможных действий, зависящие от состояния параметры (исторические параметры) и/или зависящий от состояния критерий могут быть сохранены в базе данных системы контроля или ее компьютера.
Изобретение и/или описанные варианты его осуществления могут быть реализованы - по меньшей мере, частично или полностью - в виде программного обеспечения и/или аппаратного обеспечения, т.е. в последнем случае с помощью специальной электрической схемы.
Кроме того, изобретение и/или описанные варианты его осуществления могут быть реализованы - по меньшей мере, частично или полностью - посредством машиночитаемого носителя, содержащего компьютерную программу, причем при выполнении этой компьютерной программы на компьютере, реализуют способ в соответствии с изобретением и/или в соответствии с вариантами его осуществления.
Поэтому, техническая задача, решаемая изобретением, заключается в автоматическом прогнозировании нескольких состояний или использования или профиля изнашиваемого элемента рельсового транспортного средства, такого как поезд, в короткие и средние сроки. В итоге, предложенный способ решает техническую задачу прогнозирования необходимости восстановления профиля или замены изнашиваемого элемента в случае нормального износа в короткие и средние сроки.
Приведенное выше описание предпочтительных вариантов осуществления изобретения содержит множество признаков, которые частично комбинируют друг с другом в зависимых пунктах формулы изобретения. Целесообразно, чтобы эти признаки также можно было рассматривать по отдельности и объединять друг с другом в дополнительные подходящие комбинации. Кроме того, признаки способа, сформулированные как признаки устройства, можно рассматривать как признаки узла, и, соответственно, признаки узла, сформулированные как признаки процесса, можно рассматривать как признаки способа.
Вышеописанные характеристики, признаки и преимущества изобретения и способ их достижения можно лучше понять из последующего описания примеров осуществления, которые будут объяснены со ссылкой на чертежи. Примеры осуществления предназначены для иллюстрации изобретения, но не должны ограничивать объем изобретения приведенными в них комбинациями признаков, а также функциональными признаками. Кроме того, подходящие признаки каждого из примеров осуществления также могут быть рассмотрены отдельно явным образом, удалены из одного из примеров осуществления, введены в другой пример осуществления и/или объединены с любым из пунктов прилагаемой формулы изобретения.
Краткое описание чертежей
Настоящее изобретение будет описано со ссылкой на чертежи, на которых:
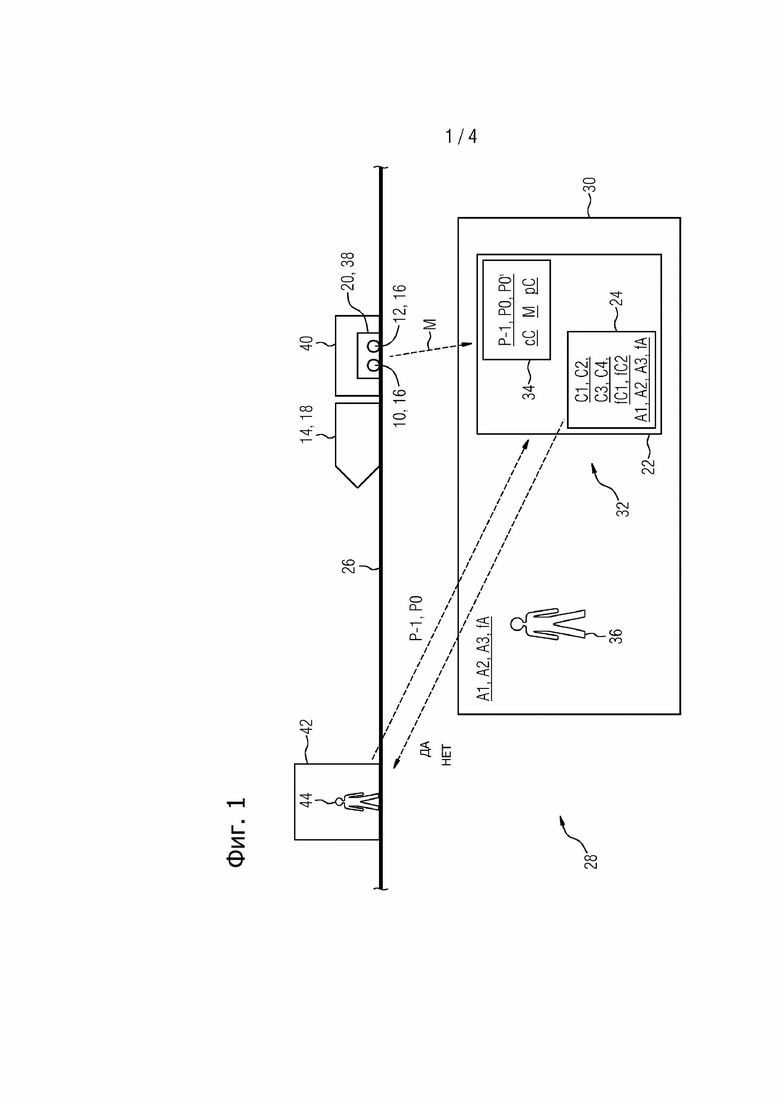
на фиг. 1 схематично показана трасса с рельсовым транспортным средством, имеющим изнашиваемый элемент, а также система контроля для контроля состояния изнашиваемого элемента;
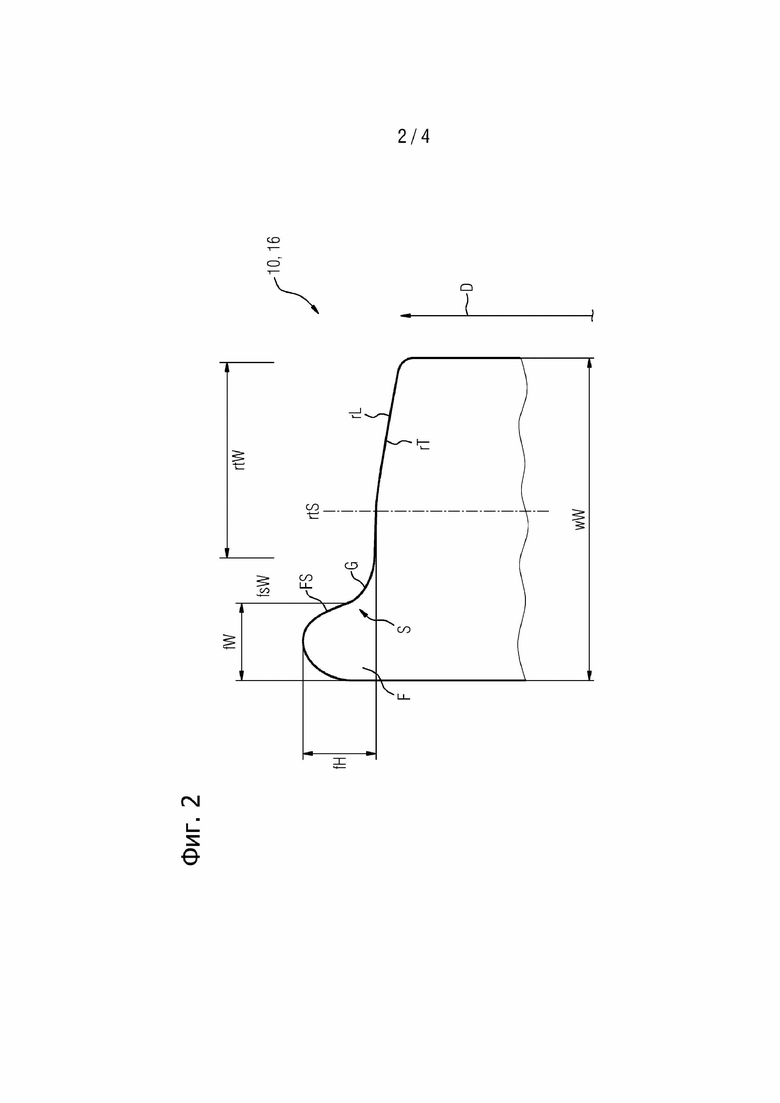
на фиг. 2 схематично показан вид сбоку колеса рельсового транспортного средства, показанного на фиг. 1;
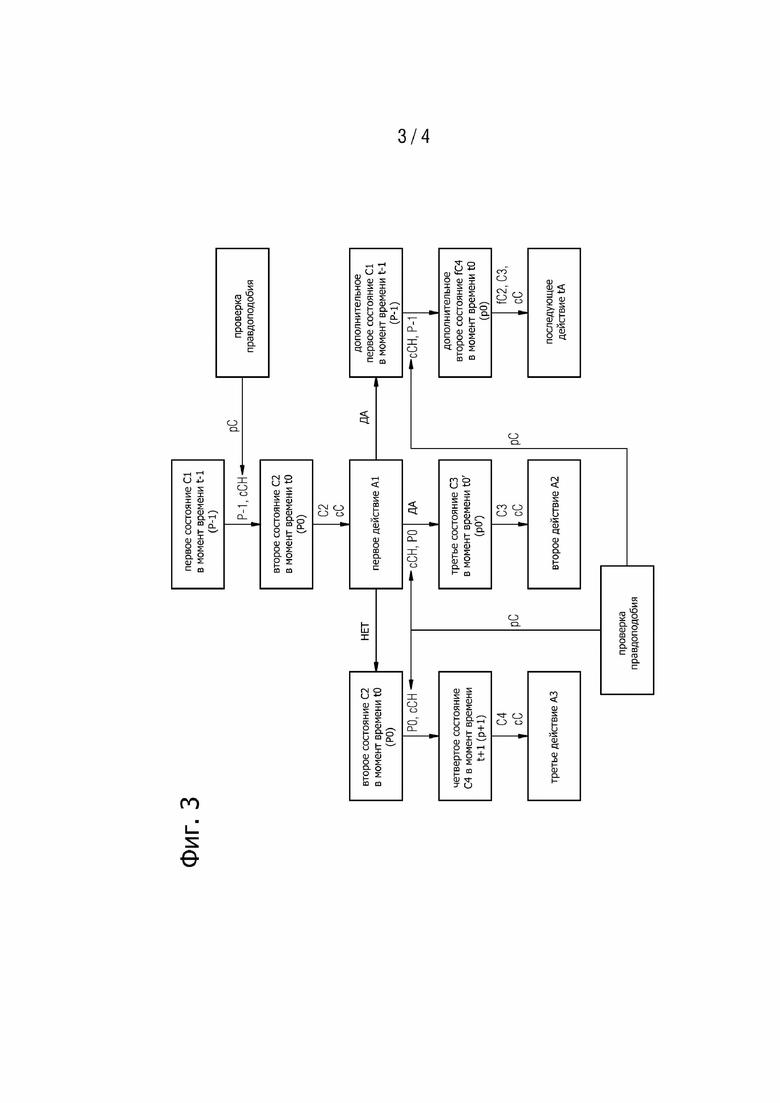
на фиг. 3 показана блок-схема стратегии работы в соответствии с предложенным в изобретении способом контроля, а
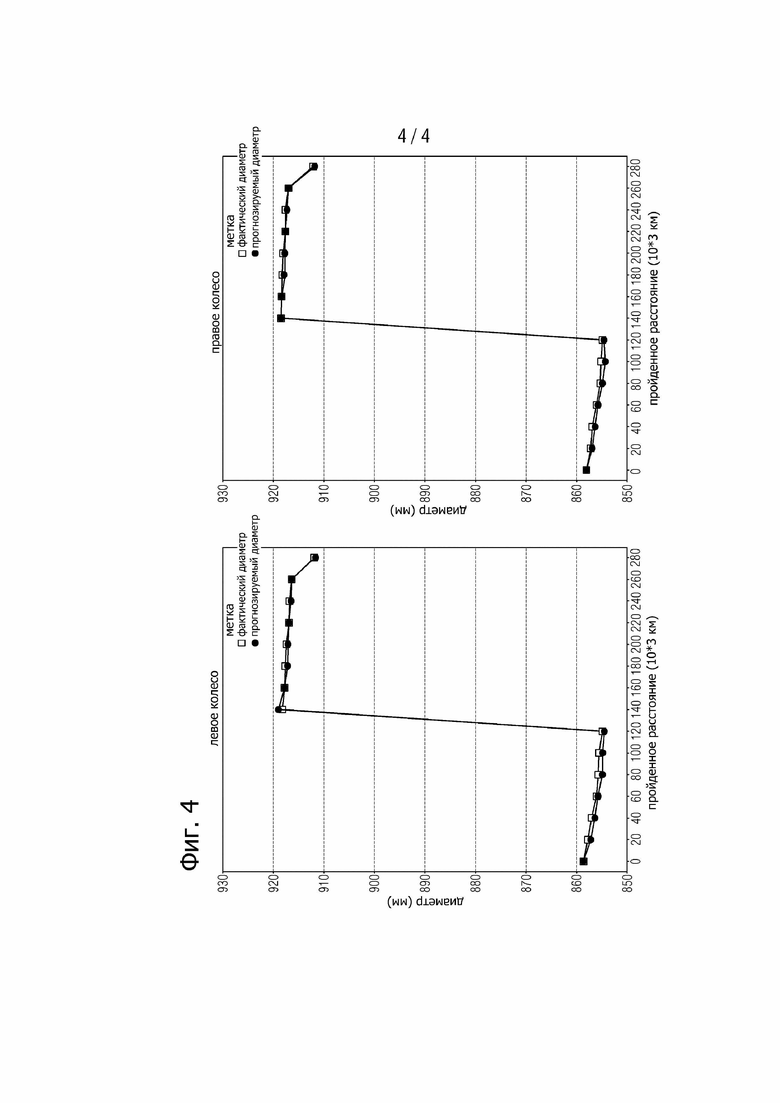
на фиг. 4 показано две схемы, отображающие изменение диаметра правого и левого колеса колесной пары в зависимости от пройденного расстояния.
Подробное описание предпочтительных вариантов осуществления
На фиг. 1 на схематичном виде показана предварительно заданная трасса 26 железнодорожной системы 28, такой как, например, немецкая или российская железнодорожная магистраль. Более того, на фиг. 1 показано рельсовое транспортное средство 14, такое как поезд 18, в виде высокоскоростного поезда 18, который может перемещаться по предварительно заданной трассе 26.
Железнодорожная система 28 также имеет центр 30 управления, который содержит компьютер 32, оснащенный компьютерной программой, содержащей команды, при выполнении которых компьютером 32 компьютер 32 выполняет этапы способа контроля. Предложенный способ обеспечивает возможность прогнозирования (первого, второго, третьего или следующего) действия или, в частности, необходимости восстановления профиля (действия) или замены (действия) изнашиваемого элемента 10, 12 в случае нормального износа в короткие или средние сроки. Кроме того, он обеспечивает возможность бездействия и, таким образом, отсутствие необходимости восстановления профиля или замены.
Более того, центр 30 управления содержит, как часть компьютера 32, систему 22 контроля для выполнения способа контроля состояния С1, С2, С3, С4, fC1, fC2 изнашиваемого элемента 10, 12 рельсового транспортного средства 14. Поэтому, система 22 контроля содержит по меньшей мере одно устройство 24 определения для выполнения этапов способа контроля. Устройство 24 определения представляет собой устройство обработки. Более того, оно содержит устройство 34 хранения для хранения измеренных, определенных или вычисленных зависящих от состояния параметров P-1, P0, P0' (исторические значения), зависящего от состояния критерия cC или критерия pC правдоподобия. Управление центром управления может осуществлять оператор 36.
Изнашиваемый элемент 10, 12 может представлять собой колесо 16, тормозную колодку, тормозной башмак, винт, пружину, замок или центральный механизм. Однако изобретение будет описано на примере колеса 16. Изнашиваемый элемент 10, 12 может представлять собой часть узла более высокого уровня или общей структуры 20, как в случае колеса 16 - колесная пара, тележка 38 или вагон 40. Например, вагон 40 может иметь две тележки 38. Тележка 38, в свою очередь, может иметь две оси с двумя колесами 16 на каждой оси, следовательно, тележка 38 имеет четыре колеса 16, а вагон 40 - восемь колес 16.
На фиг. 1 два изнашиваемых элемента 10, 12 принадлежат одной и той же тележке 38, но на показанном примере разным колесным парам. Предложенный в изобретении способ будет описан путем определения изнашиваемого элемента 10 в качестве основного исследуемого или первого изнашиваемого элемента, а другого изнашиваемого элемента 12 в качестве дополнительного, второго или подчиненного изнашиваемого элемента. Однако в практике оба изнашиваемых элемента 10, 12 могут быть обработаны предложенным в изобретении способом по-отдельности, и "ранжирование" изнашиваемых элементов 10, 12 будет противоположным.
В предложенном в изобретении способе контроля состояние C1, C2, C3, C4, fC1, fC2 изнашиваемого элемента 10, 12 рельсового транспортного средства 14 в этом примере осуществления использует исторические данные или исторический зависящий от состояния параметр P-1 измерений колеса для прогнозирования износа колеса. Таким образом, каждое состояние C1, C2, C3, C4, fC1, fC2 описывают по меньшей мере одним зависящим от состояния параметром P-1, P0, P0’, P+1. Этот параметр P-1, P0, P0', P+1 может представлять собой, например, диаметр D, высоту fH фланца, ширину fW фланца, ширину fsW буртика фланца, уклон S буртика фланца, канавку G, раскатанный слой rL, ширину rtW протектора, площадь rtS протектора, рабочую нагрузку на изнашиваемого элемента 10, 12, пройденный пробег M изнашиваемого элемента 10, 12, толщину тормозной колодки или башмака, возраст изнашиваемого элемента 10, 12, профиль изнашиваемого элемента 10, 12, неровность изнашиваемого элемента 10, 12. В последующем описании способ будет объяснен на примере только одного типа параметра P-1, P0, P0', P+1, такого как диаметр D колеса 16. В общем, способ может быть выполнен для каждого параметра как одномерной модели, или для нескольких параметров как многомерной модели.
Исторический зависящий от состояния параметр P-1 (и зависящие от состояния параметры P0, P0', P+1 для прогнозирования в будущем) могут быть получены во время процесса технического обслуживания, выполняемого в депо 42 обслуживающим персоналом 44, например, путем выполнения измерений на изнашиваемом элементе 10, 12 или считывания бортовых журналов поезда 18. Измерения формы колеса и его зависящих от состояния параметров P-1 (P0, P0’, P+1) выполняют как стандартную процедуру с регулярной частотой в ремонтном депо 42, и, таким образом, могут быть получены исторические данные измерений колеса. Частоту измерения определяют фиксированным числом дней или пробегом М, который поезд 18 должен проходить между проверками. Например, многократно измеряют или собирают следующие параметры P-1 (P0, P0', P+1): высота fH гребня или фланца, раскатанный слой rL, толщина или ширина fW гребня/фланца, диаметр D колеса 16, пробег колеса М.
Также для каждого типа поезда 18 известны критические значения зависящих от состояния параметров P0, P0’, P+1, когда следует восстановить профиль колеса 16 или заменить его. Кроме того, обычно проверяют, нет ли повреждений на колесе 16. Также известна статистика того, насколько обычно уменьшается диаметр D колеса 16 после восстановления профиля, и информацию об этом сохраняют в запоминающем устройстве 34.
На фиг. 2 показан вид сбоку колеса 16 с гребнем или фланцем F, и колесо или протектор rT показаны для отображения различных структур колеса 16, которые могут быть измерены, таких как диаметр D, высота fH фланца, ширина fW фланца, ширина fsW буртика фланца, уклон S буртика FS фланца, канавка G, раскатанный слой rL, ширина rtW протектора, площадь rtS протектора или ширина wW.
На фиг. 3 показана блок-схема стратегии предложенного в изобретении способа. Способ содержит следующие этапы: Определяют второе состояние С2 первого или основного изнашиваемого элемента 10, которое является хронологически последующим состоянием после первого состояния С1, начиная с первого состояния С1 изнашиваемого элемента 10, с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента 10.
Например, для момента t0 времени, такого как момент t0 времени следующей проверки или технического обслуживания, прогнозируют состояние C2 колеса 16, например, величину диаметра D колеса 16. Следовательно, исторические данные или параметр P-1 (диаметр D), известный для момента t-1 времени, когда колесо 16 имело состояние C1, проверяют с использованием алгоритма машинного обучения. Как было сказано выше, состояние C1 описывают параметром P-1 (диаметром D колеса 16 в момент t-1 времени). Алгоритм машинного обучения представляет собой алгоритм обучения с учителем и, в частности, алгоритм автоматической регрессии, и, в частности, обучаемый обычным методом наименьших квадратов (OLS) (подробности приведены ниже).
На последующем этапе определяют первое выполнимое действие, выполняемое на изнашиваемом элементе 10, с использованием определенного второго состояния С2 изнашиваемого элемента 10 и по меньшей мере одного предварительно заданного зависящего от состояния критерия cC для изнашиваемого элемента 10. Следовательно, оценивают, соответствует ли результат регрессионной модели или конкретная величина диаметра (состояние C2 или прогнозируемый параметр P0 в момент t0 времени) предварительно определенному зависящему от состояния критерию cC или нескольким зависящим от состояния критериям cC. Предварительно заданный зависящий от состояния критерий cC представляет собой эксплуатационный предел зависящего от состояния параметра P0. Возможные предварительно заданные критерии будут описаны ниже.
Результат этой оценки, в свою очередь, является классификационным решением. Следовательно, способ определения первого выполнимого действия A1 дает решение ДА/НЕТ с использованием модели принятия решения. Ответ ДА/НЕТ, конечно, зависит от заданного вопроса. В этом примере осуществления вопросы могут быть следующими: "Необходимо ли восстановление профиля?", "Необходима ли замена?" или "Следует ли ничего не делать?". Следовательно, первое выполнимое действие А1 может представлять собой восстановление профиля изнашиваемого элемента 10, замену изнашиваемого элемента 10 или бездействие.
Стратегия, показанная на фиг. 3, рассматривает любой из следующих вопросов: "Необходимо ли восстановление профиля?" или "Необходима ли замена?" Если ответ ДА, то первое выполнимое действие А1 приведет к изменению cCH состояния изнашиваемого элемента 10 или параметра P0, а именно, из состояния С2 в состояние С3 с параметром P0'. Другими словами, произойдет изменение диаметра D между моментом времени t0 и моментом времени t0', моментом времени после восстановления профиля или после замены колеса 16. Следовательно, способ содержит дополнительный этап, на котором: Отображают изменение cCH состояния в модели принятия решений как решение ДА/НЕТ.
Более того, чтобы гарантировать, что изнашиваемый элемент 10 все еще удовлетворяет критерию безопасности железнодорожной системы, особенно после выполненного восстановления профиля, определяют результирующее состояние С3 изнашиваемого элемента 10 с использованием изменения cCH состояния изнашиваемого элемента 10, причем изменение cCH состояния является следствием первого выполнимого действия А1. Более того, еще раз определяют второе выполнимое действие А2, выполняемое на изнашиваемом элементе 10, с использованием результирующего третьего состояния С3 изнашиваемого элемента 10 и по меньшей мере одного предварительно заданного зависящего от состояния критерия сС для изнашиваемого элемента 10. Здесь, предварительно заданный зависящий от состояния критерий cC представляет собой эксплуатационный предел зависящего от состояния параметра P0. Более того, второе выполнимое действие А2 также может представлять собой восстановление профиля, замену или бездействие. Также, предварительно заданный зависящий от состояния критерий сС может быть тем же, что критерий, применявшийся для определения первого выполнимого действия А1 на изнашиваемом элементе 10, или другим. Предварительно заданный зависящий от состояния критерий cC представляет собой эксплуатационный предел зависящего от состояния параметра P0'.
Более того, можно проверить правдоподобие либо используемых исторических данных, либо зависящего от состояния параметра P-1, либо прогнозируемых параметров P0, P0’, P+1. Следовательно, на опциональном этапе способа проверяют, соответствует ли определенное изменение cCH состояния изнашиваемого элемента 10 по меньшей мере одному критерию pC правдоподобия, причем изменение cCH состояния основано по меньшей мере на одном измеренном или определенном зависящем от состояния параметре P-1, P0, P0’, P+1, относящемся к изнашиваемому элементу 10 (подробности см. ниже). Однако, чтобы гарантировать валидность используемых исторических данных, этот этап должен быть выполнен по меньшей мере для исторического зависящего от состояния параметра P-1. Поскольку эти исторические данные или зависящий от состояния параметр P-1 используют для алгоритма машинного обучения, то обучающие данные для алгоритма машинного обучения могут быть выбраны с использованием по меньшей мере одного критерия pC правдоподобия.
Кроме того, первое выполнимое действие А1 также может влиять на состояние или судьбу других конструкций или дополнительного, второго, изнашиваемого элемента 12. В общем, это может быть один дополнительный изнашиваемый элемент 12 или несколько. Все изнашиваемые элементы 10, 12 могут относиться к одному типу, например, все изнашиваемые элементы 10, 12 являются колесами 16, или принадлежать к разным категориям, например, один - колесо 16, а другой - тормозная колодка. Кроме того, первый или основной изнашиваемый элемент 10 и дополнительный, второй изнашиваемый элемент 12 оба могут представлять собой части общей структуры 20 или узла более высокого уровня, например колесной пары, тележки 38 или вагона 40. Следовательно, дополнительный изнашиваемый элемент 12 можно рассматривать как зависимую от первого изнашиваемого элемента 10 структуру.
Следовательно, дополнительное второе состояние fC2 (диаметр D (P0) дополнительного изнашиваемого элемента 12 в момент времени t0) дополнительного изнашиваемого элемента 12, которое является хронологически последующим состоянием после дополнительного первого состояния fC1 (диаметр D (P-1) дополнительного изнашиваемого элемента 12 в момент t-1 времени) определяют, начиная с дополнительного первого состояния fC1 дополнительного изнашиваемого элемента 12, с использованием алгоритма машинного обучения.
Следовательно, еще раз определяют следующее выполнимое действие fА (такое как восстановление профиля, замена или бездействие), выполняемое на изнашиваемом элементе 12, с использованием результирующего дополнительного второго состояния fС2 изнашиваемого элемента 10, третьего состояния С3 первого изнашиваемого элемента 10 и по меньшей мере одного предварительно заданного зависящего от состояния критерия сС для дополнительного изнашиваемого элемента 12. Этот предварительно заданный зависящий от состояния критерий сС может быть тем же, что критерий, применявшийся для определения первого выполнимого действия А1 на первом изнашиваемом элементе 10, или другим. Предварительно заданный зависящий от состояния критерий cC представляет собой эксплуатационный предел зависящего от состояния параметра P0. Возможные предварительно заданные критерии будут описаны ниже.
Аналогичные этапы для определения третьего состояния C3 первого изнашиваемого элемента 10 и второго выполнимого действия A2, выполняемого на первом изнашиваемом элементе 10, могут быть выполнены для дополнительного изнашиваемого элемента 12.
В случае если первое выполнимое действие А1 является бездействием (в этом примере осуществления ответ на вопрос "Требуется ли восстановление профиля/замена?" будет "НЕТ"), также можно проверить, следует ли выполнить превентивное восстановление профиля или замену изнашиваемого элемента 10. Следовательно, определяют результирующее четвертое состояние С4 (параметр P+1 в момент t+1времени) изнашиваемого элемента 10, которое является хронологически последующим состоянием после второго состояния С2 (параметра P0 в момент t0 времени), начиная со второго состояния С2 изнашиваемого элемента 10, используя алгоритм машинного обучения, который представляет хронологическое поведение изнашиваемого элемента 10, и еще раз определяют третье выполняемое действие А3, выполняемое на изнашиваемом элементе 10 с использованием результирующего четвертого состояния С4 изнашиваемого элемента 10 и, по меньшей мере, одного предварительно заданного зависящего от состояния критерия cC для изнашиваемого элемента 10.
Опять, выполнимое действие может представлять собой восстановление профиля, замену или бездействие. Этот предварительно заданный зависящий от состояния критерий сС может быть тем же, что критерий, применявшийся для определения первого (и второго) выполнимого действия А1 (А2) на изнашиваемом элементе 10, или другим. Предварительно заданный зависящий от состояния критерий cC представляет собой эксплуатационный предел зависящего от состояния параметра P+1. Возможные предварительно заданные критерии будут описаны ниже.
Аналогичные этапы для определения третьего состояния C3 изнашиваемого элемента 10 и второго выполнимого действия A2, выполняемого на изнашиваемом элементе 10, могут быть выполнены после третьего выполнимого действия А3. Кроме того, последствия третьего выполнимого действия A3 для дополнительного изнашиваемого элемента 12 также можно рассматривать и выполнять, как указано выше.
Кроме того, критические значения могут быть заданы для каждого изнашиваемого элемента 10 или, например, его профиля. Достижение критического значения параметра P0 может подразумевать восстановление профиля или замену изнашиваемого элемента 10. Если параметр P0 изнашиваемого элемента 10 близок к достижению критического(их) значения(й), то важно понять, будет ли параметр P0 изнашиваемого элемента 10 уже выходить за эти критические значения при следующей проверке в момент t+1 времени. Возможно, лучше выполнить восстановление профиля во время текущей проверки (t0) или дождаться следующей проверки (t+1).
Таким образом, предпочтительно, этапы определения четвертого состояния C4 и третьего выполнимого действия A3 выполняют только тогда, когда результирующее второе состояние C2 имеет предварительно заданное расстояние до предварительно определенного зависящего от состояния критерия cC. Другими словами, определяют, насколько далеко определенное значение (параметр P0) находится от значения, которое будет превышать зависящий от состояния критерий cC или критическое значение.
Ниже способ будет подробно описан на примере колеса 16, выступающего в качестве изнашиваемого элемента 10, параметра P-1, P0, P0', P+1, выступающего в качестве диаметра D колеса 16.
На первом этапе предварительной обработки проверяют достоверность исторических данных. Измерения колес 16 в депо 42 могут содержать много несоответствий. Перед обработкой исторических данных (параметр P-1 из последней проверки или параметры из предыдущих проверок, например, два, три или четыре интервала проверки назад) необходимо убедиться, что данные согласованы и очищены от ошибок и неправильных измерений. Следовательно, необходимо проверить следующие критерии pC правдоподобия:
- Диаметр D колеса 16 не может увеличиться. Диаметр D колеса увеличивается только в том случае, если колесо 16 было заменено после последней проверки.
- Высота fH гребня или фланца F колеса не может уменьшиться, если после последней проверки колесо 16 не было заменено. Высота fH фланца F может уменьшиться только вследствие восстановления профиля. В этом случае это должно произойти одновременно с восстановлением профиля. Восстановление профиля можно определить по быстрому уменьшению диаметра колеса D в течение очень короткого периода времени.
- Уменьшение диаметра колеса D должно происходить одновременно с уменьшением профиля раскатанного слоя rL.
- Диаметр колеса D должен постоянно уменьшаться, если колесо 16 не было заменено.
- Раскатанный слой rL должен постоянно увеличиваться, когда поезд 18 движется (диаметр D уменьшается), но быстро уменьшаться, когда восстанавливают профиль или меняют колесо 16.
Все эти критерии pC правдоподобия также следует применять при проверке правдоподобия определенных параметров P0, P0’, P+1.
На следующем этапе строят модель прогнозирования. Чтобы определить обучение с учителем более формально, пусть x(i) обозначает входные переменные, также называемые "признаками", а y(i) обозначает "целевую" или "выходную" переменную. Пару (x(i), y(i)) называют "обучающей выборкой", а список из N обучающих выборок {(x(i), y(i))}, где i = 1,2,3,…, N, называют "обучающим множеством". Цель состоит в том, чтобы получить функцию h:X → Y, где X, Y обозначают пространство входных значений и пространство выходных значений соответственно. Эту функцию h обычно называют "гипотезой".
Модель прогнозирования профиля колеса относится к задаче регрессии с учителем. Это задача обучения с учителем, потому что мы получаем функцию отображения входных переменных/сигналов на целевые переменные с помощью нашей модели прогнозирования.
Это регрессия, потому что целевые переменные (то есть диаметр D колеса 16) являются переменными с непрерывными значениями. Точки данных в наших обучающих данных измеряют с течением времени, значение целевой переменной (т.е. диаметр D) y(t0), измеренное в момент времени t0, зависит от работы, выполненной колесом 16, и предыдущего значения целевой переменной y(t − 1), измеренного в момент времени t-1 (значения параметра P-1). Задачи такого рода подпадают под категорию анализа временных рядов.
В предложенном в изобретении способе используют модифицированную версию модели авторегрессии, поскольку она является простой и ее можно легко обучать с использованием стандартного метода наименьших квадратов (OLS).
Модель сформулирована следующим образом:
Y(t0) = α+βy(t− 1) + yz,
где y(t0) обозначает значение целевой переменной (например, диаметра D колеса 16) в момент времени t0, y(t – 1) обозначает значение целевой переменной в момент времени (t − 1), z обозначает работу, выполненную (вычисленную в терминах пробега M) колесом 16 до момента времени t0, α константа регрессии, β и γ - коэффициенты регрессии.
Основное предположение здесь заключается в том, что значение целевой переменной (параметр P0) зависит от предыдущих значений целевой переменной (параметра P-1). Переменную пробега добавляют к модели, чтобы использовать тренд (уменьшение диаметра D), обнаруженный в измеренных данных.
В общем, построение модели прогнозирования состоит в обучении, проверке и тестировании модели. Весь набор данных разделяют на обучающий, проверочный и тестовый наборы данных.
Модель обучают на обучающих данных, при этом оптимизируют внутренние параметры P-1, P0, P0', P+1 модели. После оптимизации модели вычисляют производительность моделей на тестовых данных.
В этом случае подготавливают набор входных данных так, чтобы он соответствовал сформулированной модели, как описано выше. Затем, с помощью метода OLS регрессии определяют регрессионную константу α и коэффициенты β, γ регрессии.
Также, в процедуру обучения вводят технологию сгруппированной авторегрессии. Сгруппированную авторегрессию определяют следующим образом: группируют значения диаметра на "n" классов и обучают отдельную модель для каждого класса. Таким образом, модели могут захватить изменение в поведении износа колеса для различных диаметров D колес 16. Эти полученные параметры P0, P+1 модели применяют для прогнозирования значения целевых переменных в будущем для 1, 2, … шагов.
Теперь обсудим преобразование предсказания модели в решение. Предсказанные целевые переменные из модели пропускают через слой, который состоит из правил, основанных на правилах безопасности или зависящий от состояния критерий cC (см. ниже). Входные данные слоя - это прогнозируемые значения или параметры P0, P0’, P+1 из модели, а выходные данные - это решение ДА/НЕТ, напр., о действиях A1, A2, A3, fA восстановления профиля/замене колеса.
Требования безопасности определяют, при каких условиях изнашиваемый элемент 10, 12 или колеса 16 должен быть подвергнут восстановлению профиля или замене. Критерий для выполнения восстановления профиля или замены изнашиваемого элемента 10, 12 или, в данном примере осуществления колеса 16, может учитывать следующие параметры P-1, P0, P0’, P-1 колеса 16 (правила безопасности):
- Высота fH фланца колеса должна лежать в определенных границах. Минимальная и максимальная высота fH фланца F задана. Высота fH фланца должна быть на меньше 5% от диаметра D колеса 16 и больше 3% диаметра D колеса 16. Например, поезда "Velaro Russia" имеют минимальную ширину fW фланца, равную 28 миллиметров (мм) и максимальную ширину fW фланца, равную 35 мм.
- Ширина fW фланца колеса должна лежать в определенных границах. Минимальная и максимальная ширина fW фланца F задана. Ширина fW фланца должна быть меньше 4% диаметра D колеса 16 (меньше, чем 25% ширины wW колеса 16) и больше 3% диаметра D колеса 16 (больше, чем 20% ширины wW колеса 16). Например, поезда "Velaro Russia" имеют минимальную ширину fW фланца, равную 28 мм и максимальную ширину fW фланца, равную 34 мм.
- Максимальный/критический износ колеса 16 ограничен, напр., максимальное уменьшение диаметра колеса 16 до этапа восстановления профиля составляет 5 мм.
- Грохот обода должен быть меньше, чем фиксированное пороговое значение. Например, для поездов "Velaro Russia" грохот обода должен быть меньше 3 мм.
- Критически диаметра D представляет собой минимальный диаметр D, который определяет, когда колесо 16 необходимо заменить. Например, для поездов "Velaro Russia" минимальный диаметр D колеса 16 составляет 853 мм (исходный диаметр D равен 920 мм), и, таким образом, отклонение диаметров D составляет около 7,5%.
- Разница между диаметрами D колес 16 в одной колесной паре должна быть ниже некоторого порогового значения, например, 0,15%. Например, для поездов "Velaro Russia" она равна 1,2 мм.
- Разница между диаметрами D колес 16 в одной тележке 38 должна быть ниже некоторого порогового значения, и обычно этот порог отличается для вагонов с силовым приводом и вагонов без силового привода. Она должна быть меньше 0,6% для вагонов 40 с силовым приводом и меньшей 1,75% для вагонов 40 без силового привода. Например, для поездов "Velaro Russia" разница должна быть меньше 5 мм для вагонов 40 с силовым приводом и меньше 15 мм для вагонов 40 без силового привода.
- Разница между диаметрами D колес 16 в одном вагоне также должна быть ниже некоторого порогового значения. Обычно пороговое значение отличается для вагонов 40 с силовым приводом и вагонов 40 без силового привода. Она должна быть меньше 0,6% для вагонов 40 с силовым приводом и меньшей 3,5 % для вагонов 40 без силового привода. Например, для поездов "Velaro Russia" разница должна быть меньше 5 мм для вагонов 40 с силовым приводом и меньше 30 мм для вагонов 40 без силового привода.
Критические значения или зависящий от состояния критерий cC включают в модель прогнозирования, чтобы принять решение, когда будет необходимо провести восстановление профиля или замену колеса 16.
Модель прогнозирования можно подытожить следующим образом:
- Для того чтобы предсказать, требуется ли выполнимое действие А1, например, восстановление профиля, при следующей проверке (t0), вычисляют значения целевых переменных на шаг вперед, и если какие-либо целевые переменные достигают своего порогового значения или не соответствуют зависящему от состояния критерию cC, то следует выполнить восстановление профиля. Следовательно, для этого колеса 16, для которого достигнуто пороговое значение, модель рекомендует выполнить восстановление профиля.
- Имея статистику из предыдущих процедур восстановления профиля, т.е. зная среднюю разницу до и после восстановления профиля, можно вычислить новый диаметр D колеса 16 и использовать для прогнозирования результат восстановления профиля. Учитывая этот новый диаметр D, снова проверяют зависящий от состояния критерий cC и определяют, выходит ли новый диаметр D за какое-либо из пороговых значений зависящего от состояния критерия cC.
Более того, опциональные и/или последующие этапы можно подытожить следующим образом:
- Выполнимое действие А1 или восстановление профиля одного изнашиваемого элемента 10 или колеса 16 может привести к восстановлению профиля некоторого зависящего от него дополнительного изнашиваемого элемента 12 или колеса 16.
- Также иногда необходимо предсказать, следует ли выполнить так называемое превентивное восстановление профиля. Превентивное восстановление профиля обычно выполняют, когда колеса еще не достигли критических значений параметра, но близки к этим значениям, и следует предотвратить достижение параметрами колес 16 критических значений до следующей проверки. В этом случае модель должна предсказать целевые значения не на один шаг вперед, а на два шага вперед (значения после следующей проверки).
На фиг. 4 показаны результаты тестирования в виде двух графиков, отображающих изменение диаметра D левого (левый график) и правого (правый график) колеса колесной пары вагона 40 без силового привода в зависимости от пройденного расстояния. По оси y показан диаметр (в мм), а по оси x - пройденное расстояние (в 103 км). График, выполненный жирными точками, показывает предсказанные значения диаметра D, а график, выполненный пустыми квадратами, показывает измеренные значения диаметра D. Как видно на графиках, действительные и предсказанные значения диаметров D колес очень точно совпадают. Таким образом, модель работает очень хорошо. Быстрый рост графиков указывает на замену колеса 16.
Таким образом, имея предсказанное правильное значение диаметров, для каждого колеса 16 можно корректно предсказать, необходимо ли восстановление профиля, а учитывая статистику уменьшения диаметра D после восстановления профиля, прогнозировать, будет ли также необходимо выполнить восстановление профиля других колес.
Следует отметить, что термин "содержащий" не исключает других элементов или этапов, а неопределенный артикль не исключает множественного числа. Также элементы, описанные в связи с различными вариантами осуществления, можно комбинировать. Также следует отметить, что ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие объем формулы изобретения.
Хотя изобретение проиллюстрировано и подробно описано для предпочтительных вариантов осуществления, изобретение не ограничено приведенными примерами, и специалист в этой области техники может получить из них другие варианты, не отклоняясь от объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Способ оценки напряженно-деформированного состояния пути | 2017 |
|
RU2659365C1 |
| СПОСОБ ПЛАНИРОВАНИЯ ПЕРЕДВИЖЕНИЯ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ЧЕРЕЗ ЖЕЛЕЗНОДОРОЖНЫЙ СТАНЦИОННЫЙ ПАРК (ВАРИАНТЫ) | 2006 |
|
RU2430845C2 |
| ОПРЕДЕЛЕНИЕ ПРОДОЛЖИТЕЛЬНОСТИ ПОСАДКИ/ВЫСАДКИ ОБЪЕКТА | 2018 |
|
RU2706875C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| СПОСОБ ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И ПУТИ | 2024 |
|
RU2839336C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМБИНИРОВАННЫМ ПРИВОДОМ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2518140C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
Изобретение относится к средствам контроля состояния износа узлов рельсового транспортного средства. Способ содержит этапы, на которых: определяют второе состояние (С2) изнашиваемого элемента (10, 12), которое является хронологически последующим состоянием после первого состояния (С1), начиная с первого состояния (С1) изнашиваемого элемента (10, 12), с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента (10, 12), определяют первое выполнимое действие (А1), выполняемое на изнашиваемом элементе (10, 12), с использованием определенного второго состояния (С2) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного условного критерия (cC) для изнашиваемого элемента (10, 12), определяют результирующее третье состояние (C3) изнашиваемого элемента (10, 12), используя изменение (cCH) состояния изнашиваемого элемента (10, 12), причем изменение состояния (cCH) является следствием первого выполнимого действия (A1), и еще раз определяют второе выполнимое действие (A2), выполняемое на изнашиваемом элементе (10, 12) с использованием результирующего третьего состояния (C3) изнашиваемого элемента (10, 12) и, по меньшей мере, одного предварительно заданного зависящего от состояния критерия (cC) для изнашиваемого элемента (10, 12). Достигается повышение надежности контроля состояния износа узлов рельсового транспортного средства. 2 н. и 13 з.п. ф-лы, 4 ил.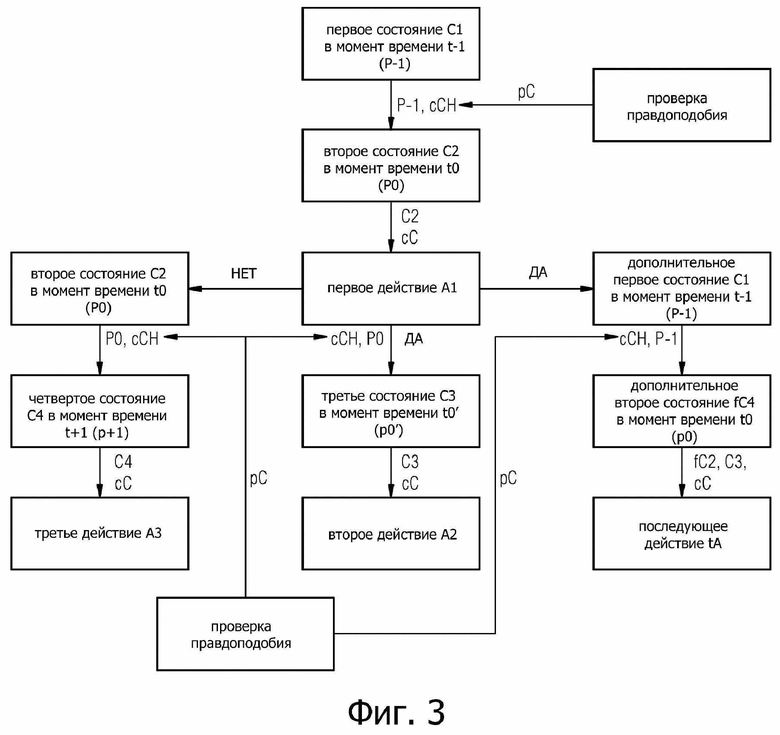
1. Способ контроля состояния (C1, C2, C3, C4, fC1, fC2) изнашиваемого элемента (10, 12) рельсового транспортного средства (14), отличающийся по меньшей мере следующими этапами:
- определяют второе состояние (С2) изнашиваемого элемента (10, 12), которое является хронологически последующим состоянием после первого состояния (С1), начиная с первого состояния (С1) изнашиваемого элемента (10, 12), с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента (10, 12),
- определяют первое выполнимое действие (А1), выполняемое на изнашиваемом элементе (10, 12), с использованием определенного второго состояния (С2) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного условного критерия (cC) для изнашиваемого элемента (10, 12),
- определяют результирующее третье состояние (С3) изнашиваемого элемента (10, 12) с использованием изменения (cCH) состояния изнашиваемого элемента (10, 12), где изменение состояния (cCH) является результатом (является следствием) первого выполнимого действия (A1), и
- еще раз определяют второе выполнимое действие (А2), выполняемое на изнашиваемом элементе (10, 12), с использованием результирующего третьего состояния (С3) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного зависящего от состояния критерия (сС) для изнашиваемого элемента (10, 12).
2. Способ по п. 1, в котором алгоритм машинного обучения представляет собой алгоритм обучения с учителем, и в частности алгоритм автоматической регрессии, и в частности обучаемый обычным методом наименьших квадратов (OLS).
3. Способ по п. 1 или 2, причем способ также содержит следующие этапы:
- проверяют, соответствует ли определенное изменение (cCH) состояния изнашиваемого элемента (10, 12) по меньшей мере одному критерию (pC) правдоподобия, причем изменение (cCH) состояния основано по меньшей мере на одном измеренном или определенном зависящем от состояния параметре (P-1, P0, P0’, P+1), относящемся к изнашиваемому элементу (10, 12).
4. Способ по п. 3, причем способ также содержит следующие этапы:
- выбирают обучающие данные для алгоритма машинного обучения с использованием хотя бы одного критерия (pC) правдоподобия.
5. Способ по любому из предыдущих пунктов, в котором первое, и/или второе, и/или третье, и/или дополнительное выполнимое действие (A1, A2, A3, fA) представляет собой восстановление профиля, замену изнашиваемого элемента или бездействие.
6. Способ по любому из предыдущих пунктов, причем способ содержит дополнительный этап, на котором:
- выполняют способ для определения первого, и/или второго, и/или третьего, и/или дополнительного выполнимого действия (A1, A2, A3, fA) в качестве решения ДА/НЕТ с использованием модели принятия решения.
7. Способ по п. 6, причем способ также содержит следующие этапы:
- отображают изменение (cCH) состояния в модели принятия решений как решение ДА/НЕТ.
8. Способ по любому из предыдущих пунктов, причем способ содержит дополнительный этап, на котором:
- описывают первое, и/или второе, и/или третье состояние (C1, C2, C3, C4, fC1, fC2) по меньшей мере одним зависящим от состояния параметром (P-1, P0, P0’, P+1), и/или в котором зависящий от состояния параметр (P-1, P0, P0’, P+1) представляет собой параметр, выбираемый из группы, состоящей из следующего: диаметр (D), высота (fH) фланца, ширина (fW) фланца, ширина (fsW) буртика фланца, уклон (S) буртика (FS) фланца, канавка (G), раскатанный слой (rL), ширина (rtW) протектора, площадь (rtS) протектора, рабочая нагрузка на изнашиваемый элемент (10, 12), пройденный пробег (M) изнашиваемого элемента (10, 12), толщина тормозной колодки или башмака, возраст изнашиваемого элемента (10, 12), профиль изнашиваемого элемента (10, 12), неровность изнашиваемого элемента (10, 12).
9. Способ по любому из предыдущих пунктов, в котором изнашиваемый элемент (10, 12) может представлять собой, например, элемент, выбранный из группы, состоящей из: колеса (16), тормозной колодки, тормозного башмака, винта, пружины, замка или центрального механизма.
10. Способ по любому из предыдущих пунктов, в котором рельсовое транспортное средство (14) представляет собой поезд (18), а изнашиваемый элемент (10, 12) представляет собой колесо (16) поезда (18).
11. Способ по любому из предыдущих пунктов, в котором по меньшей мере один предварительно заданный критерий (cC) представляет собой эксплуатационный предел зависящего от состояния параметра (P0, P0’, P+1).
12. Способ по любому из предыдущих пунктов, причем способ содержит дополнительные этапы, на которых:
- определяют дополнительное второе состояние (fС2) изнашиваемого элемента (10, 12), которое является хронологически последующим состоянием после дополнительного первого состояния (fС1), начиная с дополнительного первого состояния (fС1) изнашиваемого элемента (10, 12), с использованием алгоритма машинного обучения, и
- еще раз определяют следующее выполнимое действие (fА), выполняемое на изнашиваемом элементе (10, 12), с использованием результирующего дополнительного второго состояния (fС2) изнашиваемого элемента (10, 12), третьего состояния (С3) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного зависящего от состояния критерия (сС) для дополнительного изнашиваемого элемента (10, 12).
13. Способ по п. 12, в котором изнашиваемый элемент (10, 12) и дополнительный изнашиваемый элемент (10, 12) являются частями общей структуры (20).
14. Способ по любому из предыдущих пунктов, причем, если первое выполнимое действие (А1) является бездействием, способ содержит дополнительные этапы, на которых:
- определяют результирующее четвертое состояние (С4) изнашиваемого элемента (10, 12), которое является хронологически последующим состоянием после второго состояния (С2), начиная со второго состояния (С2) изнашиваемого элемента (10, 12), с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента (10, 12), и
- еще раз определяют третье выполнимое действие (А3), выполняемое на изнашиваемом элементе (10, 12), с использованием результирующего четвертого состояния (С4) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного зависящего от состояния критерия (сС) для изнашиваемого элемента (10, 12).
15. Система (22) контроля состояния (C1, C2, C3, C4, fC1, fC2) изнашиваемого элемента (10, 12) рельсового транспортного средства (14), отличающаяся по меньшей мере одним устройством (24) определения, предназначенным для следующего:
- определения второго состояния (С2) изнашиваемого элемента (10, 12), которое является хронологически последующим состоянием после первого состояния (С1), начиная с первого состояния (С1) изнашиваемого элемента (10, 12), с использованием алгоритма машинного обучения, который представляет хронологическое поведение изнашиваемого элемента (10, 12),
- определения первого выполнимого действия (А1), выполняемого на изнашиваемом элементе (10, 12), с использованием определенного второго состояния (С2) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного условного критерия (cC) для изнашиваемого элемента (10, 12),
- определения результирующего третьего состояния (С3) изнашиваемого элемента (10, 12) с использованием изменения (cCH) состояния изнашиваемого элемента (10, 12), где изменение состояния (cCH) является результатом (является следствием) первого выполнимого действия (A1), и
- определения еще раз второго выполнимого действия (А2), выполняемого на изнашиваемом элементе (10, 12), с использованием результирующего третьего состояния (С3) изнашиваемого элемента (10, 12) и по меньшей мере одного предварительно заданного зависящего от состояния критерия (сС) для изнашиваемого элемента (10, 12).
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 102014113371 A1, 17.03.2016 | |||
| DE 102007051126 A1, 30.04.2009. | |||

