Изобретение относится к области испытательной и измерительной техники, конкретно к способам внешнебаллистических измерений, заключающихся в визуальном отслеживании и регистрации поведения боеприпаса на траектории, позволяющем при проведении испытаний получать достоверные результаты.
Видеорегистрация и анализ параметров функционирования различных боеприпасов во время движения по траектории от дульного среза орудия до цели, позволяет получать данные об их баллистических характеристиках, поведении в полете, в том числе и непрогнозируемом, условиях возможного аварийного срабатывания отдельных частей изделия, эффективности работы боеприпаса у цели. Эта информация существенно повышает информативность испытаний, и позволяет снизить необходимые сроки на отработку конструкции боеприпаса.
Известен метод определения характеристик траектории движения пиротехнических изделий /1/, позволяющий определять координаты точек срабатывания (разрыва), подъема, догорания, угол отклонения от направления стрельбы, скорость движения пиротехнического изделия, снабженного трассером или работающим двигателем, и радиус разлета горящих (светящихся) элементов.
Сущность метода заключается в визуализации траектории полета пиротехнического изделия видеорегистрацией с двух взаимно перпендикулярных направлений, с записью результатов наблюдений и обработке изображения по заданному алгоритму.
Данный способ требует наличия на испытательной площадке вертикальных реперных знаков - вех, стрельба пиротехническими изделиями ведется преимущественно в вертикальном направлении, а их срабатывание происходит на относительно небольших высотах (не более 500 м), т.е. линейный диапазон траекторного отслеживания невелик. Кроме того способ предусматривает ручное управление процессом видеорегистрации операторами, что в определенных условиях повышает опасность его применения. В силу вышеизложенного, данный метод для траекторного отслеживания артиллерийских снарядов, перемещающихся по длинным (несколько километров) траекториям, практически не применим.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является способ обнаружения и сопровождения низколетящих целей /2/, по сути - их траекторного отслеживания, включающий размещение нескольких оптико-электронных станций (ОЭС) слежения с возможностью отслеживания движения объекта по предполагаемой траектории, расчет направления перемещения объекта для каждой ОЭС, ориентацию каждой ОЭС на расчетные направления съемки, обработку видеосигнала и передачу результатов съемки для дальнейшего анализа.
Недостатки у данного способа следующие:
- размещение ОЭС не предусматривает перекрытия зон их зрения, что исключает наблюдаемость объекта во всем диапазоне дальностей, высот и скоростей;
- включение ОЭС предполагается сразу всех, что ограничивает возможности способа по энергопотреблению;
- ориентацию каждой ОЭС на расчетные направления съемки осуществляют прогнозно по результатам предварительного радиолокационного измерения, причем без учета диапазона погрешностей измеряемых величин (азимутальные углы, расстояния до летящего объекта, углы места и т.п.).
Технической задачей предлагаемого изобретения в первую очередь является повышение информативности испытаний и точности их результатов за счет обеспечения наблюдаемости отслеживаемых объектов по всей траектории полета - во всем диапазоне дальностей, высот и скоростей, а также снижение энергозатрат на работу используемого оборудования.
Решение задачи достигается тем, что в известном способе траекторного отслеживания боеприпасов, включающем размещение нескольких оптико-электронных станций (ОЭС) слежения с возможностью отслеживания движения объекта по предполагаемой траектории, расчет направления перемещения объекта для каждой ОЭС, ориентацию каждой ОЭС на расчетные направления съемки, обработку видеосигнала и передачу результатов съемки для дальнейшего анализа, в соответствии с изобретением ОЭС размещают со взаимным перекрытием их поля зрения в горизонтальном направлении вдоль возможной траектории полета боеприпаса, ориентацию отдельных ОЭС на направления съемки осуществляют с учетом захвата в поле зрения в вертикальной плоскости «пучка» траекторий, рассчитанных с учетом погрешностей измерений в момент выстрела скорости бросания, угла бросания и азимута, а видеофиксацию ведут поочередным последовательным включением ОЭС.
Таким образом, совокупностью основных отличительных признаков предлагаемого технического решения являются:
- размещение ОЭС со взаимным перекрытием их поля зрения в горизонтальном направлении вдоль возможной траектории полета боеприпаса;
- ориентация отдельных ОЭС на направления съемки с учетом захвата в поле зрения в вертикальной плоскости «пучка» расчетных траекторий, с учетом погрешностей измерений в момент выстрела скорости бросания, угла бросания и азимута;
- поочередное последовательное включение ОЭС для видеофиксации и передачи результатов съемки.
Необходимость и достаточность вышеуказанных отличительных признаков предложенного технического решения может быть пояснена следующим образом.
Размещение ОЭС со взаимным перекрытием их поля зрения в горизонтальном направлении вдоль возможной траектории полета боеприпаса (вдоль баллистической трассы) позволяет регистрировать поведение снаряда в полете от дульного среза орудия до цели без пропусков отдельных участков траектории. Так визуализация траектории снаряда вплоть до цели позволяет также оценить его эффективность при встрече с преградой, что существенно повышает информативность испытаний.
Измерения в момент выстрела характеристик, необходимых для расчета его траектории - скорости бросания Vo, угла бросания θo и азимута β осуществляются каждое со своей некоторой погрешностью, т.е. результат получают в виде «номинальных» значений  находящихся в границах полей допусков точности измерений. Очевидно, что в случае всего трех измеряемых вышеуказанных величин «крайнее» значение любой точки расчетной траектории в пространстве может принять одно из 27-ми (3×3×3) значений в границах некоторого «пучка» возможных траекторий, - имеется неопределенность, результат которой может сказаться на точности траекторного отслеживания.
находящихся в границах полей допусков точности измерений. Очевидно, что в случае всего трех измеряемых вышеуказанных величин «крайнее» значение любой точки расчетной траектории в пространстве может принять одно из 27-ми (3×3×3) значений в границах некоторого «пучка» возможных траекторий, - имеется неопределенность, результат которой может сказаться на точности траекторного отслеживания.
Поэтому учет погрешностей измерений в момент выстрела (скорости бросания, угла бросания и азимута) для расчета «пучка» траекторий позволяет задать более точную исходную ориентацию отдельных ОЭС на направления съемки с захватом «пучка» траекторий в поле зрения в вертикальной плоскости, и тем самым, наряду со взаимным перекрытием поля зрения отдельных ОЭС в горизонтальном направлении, также повысить информативность и точность выполняемых наблюдений.
Наконец, поочередное последовательное включение ОЭС для видеофиксации и съемки позволит снизить общие энергозатраты на проведение испытаний с осуществлением способа.
Для проведения траекторных измерений могут использоваться отечественные мобильные оптико-электронные станции «Вереск» («Вереск-М», «Вереск МР»), а для измерения скорости бросания, угла бросания и азимута - устройства фотоэлектронной блокировки типа ФЭБ-5 и высокоскоростные видеокамеры со специальным программным обеспечением обработки изображений.
Изобретение поясняется следующей графической информацией:
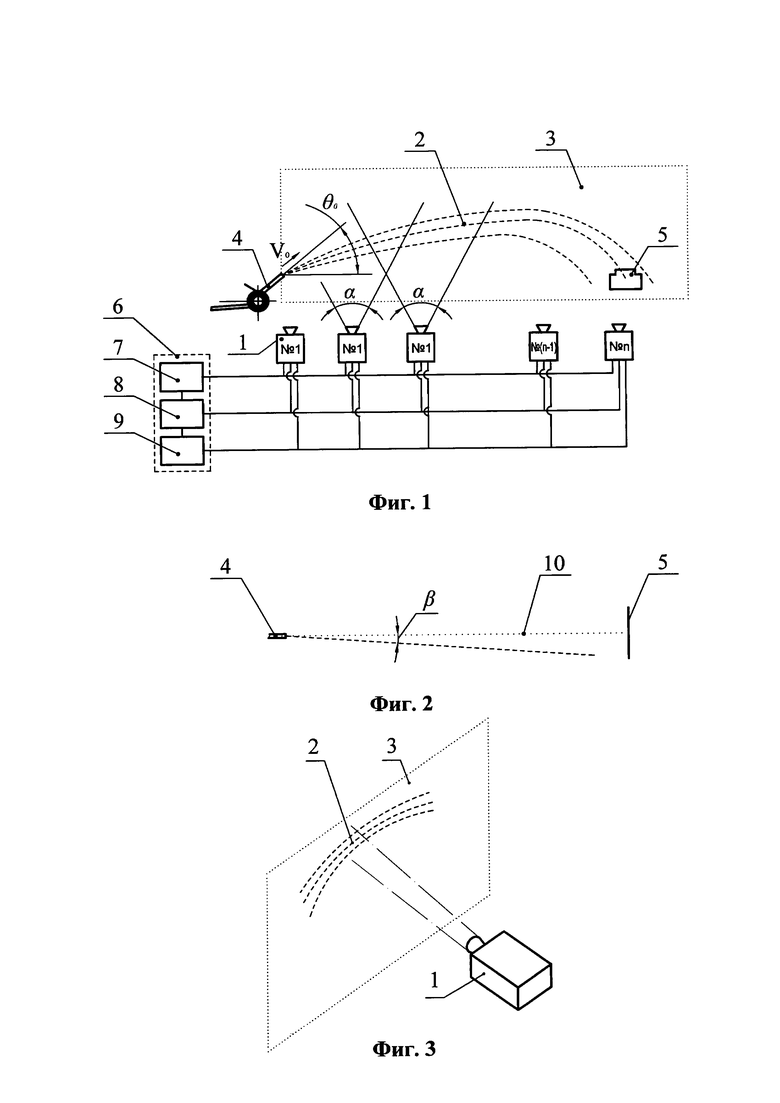
На фиг. 1 схематично представлен пример исполнения программно-аппаратного комплекса (ПАК) для проведения траекторных измерений с размещением ОЭС относительно плоскости бросания по всей длине баллистической трассы со взаимным перекрытием их поля зрения в горизонтальном направлении. Для упрощения изображения средства измерений скорости бросания, угла бросания и азимута условно не показаны.
На фиг. 2 - проекция плоскости стрельбы и азимутальный угол относительно цели в момент выстрела.
На фиг. 3 схематично представлен пример ориентации отдельной ОЭС в направлении съемки с захватом в поле зрения в вертикальной плоскости «пучка» расчетных траекторий.
Необходимое количество ОЭС 1 (№1, №2, …, №n - фиг. 1) размещено вдоль баллистической трассы таким образом, что углы их зрения а в горизонтальном направлении вдоль возможной траектории полета боеприпаса взаимно перекрываются. Ориентация отдельных ОЭС 1 на направления съемки осуществлена с учетом «пучка» траекторий 2 в проекции на плоскость бросания 3. Выстрел боеприпаса осуществляется из орудия 4 в направлении цели 5. В состав ПАК входит центральный вычислительный комплекс 6, содержащий систему единого координатно-временного обеспечения 7, предназначенную для привязки элементов измерительного комплекса к местности и обеспечения временного единства измерений, банк расчетных данных с банком программ 8, блок команд и вычислительный блок 9.
Азимутальный угол β относительно цели в момент выстрела определяется относительно проекции плоскости стрельбы 10 (фиг. 2).
Каждая ОЭС 1 ориентирована в направлении съемки с захватом в поле зрения в вертикальной плоскости «пучка» расчетных траекторий 2 в проекции на плоскость бросания 3 (фиг. 3).
Способ осуществляется по следующему алгоритму.
ОЭС 1 размещают вдоль возможной траектории полета боеприпаса со взаимным перекрытием их поля зрения в горизонтальном направлении, ориентацию отдельных ОЭС на направления съемки осуществляют с учетом захвата в поле зрения в вертикальной плоскости «пучка» траекторий 2, предварительно рассчитанного исходя из условий планируемого выстрела.
По команде, поступающей с ЦБК 6, в направлении цели 5 производится выстрел из орудия 4, расположенного на нулевой отметке трассы. Одновременно осуществляются измерения скорости бросания, угла бросания и азимута (например, локационным способом), и запускается система единого координатно-временного обеспечения 7, которая синхронизирует работу всех измерительных, вычислительных и управляющих систем.
По результатам конкретных измерений скорости бросания, угла бросания и азимута из банка данных 8 «извлекаются» заранее рассчитанные характеристики «пучка» возможных траекторий, в соответствии с которым по команде блока 9 осуществляется уточненная ориентация ОЭС 1 с захватом в поле зрения в вертикальной плоскости «пучка» траекторий 2 в проекции на плоскость бросания 3.
ОЭС №1, в поле зрения которой находится срез ствола орудия 4, захватывает выходящий из ствола снаряд и начинает сопровождать его, одновременно регистрируя его изображение и транслируя его в ЦБК 6.
При подлете снаряда к краю поля зрения ОЭС №1 ЦБК 6 выдает команду ОЭС №2 для захвата и сопровождения летящего снаряда, после чего ОЭС №1 отключается.
ОЭС №2 захватывает снаряд и начинает сопровождать его, одновременно регистрируя его изображение и транслируя его в ЦБК 6.
При подлете снаряда к краю поля зрения ОЭС №2 ЦБК 6 выдает команду для захвата и сопровождения летящего снаряда ОЭС №3, после чего ОЭС №2 отключается.
Далее эти действия повторяются пока снаряд не достигнет цели 5 (ОЭС №n), после чего вся результирующая информация передается на ЦБК 6 и система регистрации вновь приводится в исходное положение для работы с последующими выстрелами.
Таким образом обеспечение наблюдаемости отслеживаемых объектов по всей траектории полета - во всем диапазоне дальностей, высот и скоростей с использованием предложенного способа позволяет повысить информативность испытаний и точность их результатов, снизить энергозатраты на работу используемого энергоемкого оборудования - ОЭС за счет их последовательного включения, а также получать данные об баллистических характеристиках, поведении в полете, в том числе и непрогнозируемом, условиях возможного аварийного срабатывания отдельных частей испытываемого изделия, эффективности работы боеприпаса у цели, что в итоге позволит снизить необходимые сроки на отработку его конструкции.
Источники информации, принятые во внимание при оформлении заявки
1) ГОСТ Р 51271-99. Изделия пиротехнические. Методы испытаний - М.: Стандартинформ, 2011, 67 с.
2) Патент РФ №2361235 от 10.07.2009 «Способ обнаружения и сопровождения низколетящих целей», G01S 13/66 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300726C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ОРУЖИЕМ ОГНЕВОЙ ЗАЩИТЫ НОСИТЕЛЯ С РАДИОЛОКАЦИОННЫМ ПРИЦЕЛОМ | 2003 |
|
RU2230277C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И РЕАЛИЗУЮЩАЯ ЕГО СИСТЕМА ВЫСОКОТОЧНОГО ОРУЖИЯ | 2017 |
|
RU2663764C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ АРТИЛЛЕРИЙСКИМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2009 |
|
RU2408832C1 |
| СПОСОБ РАСЧЕТА ИНДИВИДУАЛЬНОЙ ФУНКЦИИ СОПРОТИВЛЕНИЯ ВОЗДУХА НЕУПРАВЛЯЕМОГО АРТИЛЛЕРИЙСКОГО СНАРЯДА ПО РЕЗУЛЬТАТАМ ТАБЛИЧНЫХ СТРЕЛЬБ ПО МЕСТНОСТИ | 2020 |
|
RU2744208C1 |
| Способ коррекции эллипса рассеивания артиллерийских вращающихся снарядов | 2019 |
|
RU2702035C1 |
| СПОСОБ ПРОВЕДЕНИЯ БАЛЛИСТИЧЕСКИХ ИСПЫТАНИЙ С СОСТАВЛЕНИЕМ ТАБЛИЦ СТРЕЛЬБЫ | 2023 |
|
RU2809361C1 |
| СПОСОБ СКАНИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ ПО КУРСУ | 2020 |
|
RU2755650C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ | 2016 |
|
RU2677705C2 |
Изобретение относится к области испытательной и измерительной техники, конкретно к способам внешнебаллистических измерений, заключающихся в визуальном отслеживании и регистрации поведения боеприпаса на траектории. Техническим результатом изобретения является повышение информативности испытаний и точности их результатов за счет обеспечения наблюдаемости отслеживаемых объектов по всей траектории полета при снижении энергозатрат на работу используемого оборудования. Способ траекторного отслеживания боеприпасов включает размещение нескольких оптико-электронных станций (ОЭС) слежения для отслеживания движения объекта по предполагаемой траектории, расчет направления перемещения объекта для каждой ОЭС, ориентацию каждой ОЭС на расчетные направления съемки, обработку видеосигнала и передачу результатов съемки для дальнейшего анализа. Для осуществления способа ОЭС размещают со взаимным перекрытием их поля зрения в горизонтальном направлении вдоль возможной траектории полета боеприпаса, ориентацию отдельных ОЭС на направления съемки осуществляют с учетом захвата в поле зрения в вертикальной плоскости «пучка» траекторий, рассчитанных с учетом погрешностей измерений в момент выстрела скорости бросания, угла бросания и азимута. Видеофиксацию ведут поочередным последовательным включением ОЭС. 3 ил.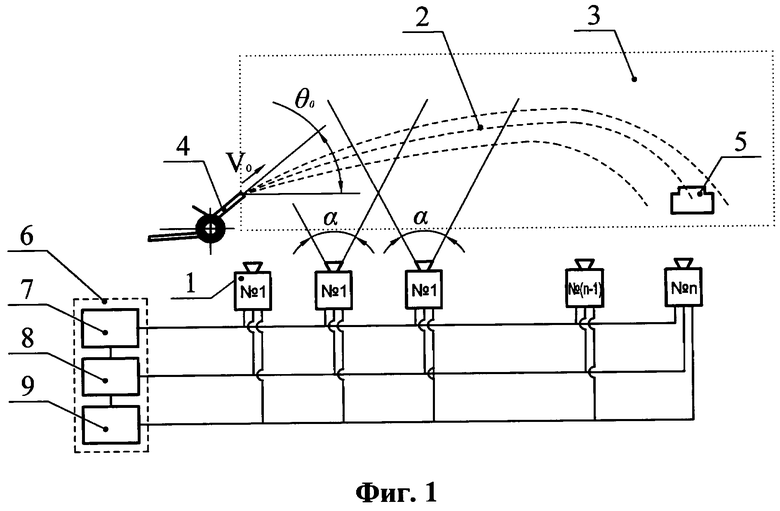
Способ траекторного отслеживания боеприпасов, включающий размещение нескольких оптико-электронных станций (ОЭС) слежения с возможностью отслеживания движения объекта по предполагаемой траектории, расчет направления перемещения объекта для каждой ОЭС, ориентацию каждой ОЭС на расчетные направления съемки, обработку видеосигнала и передачу результатов съемки для дальнейшего анализа, отличающийся тем, что ОЭС размещают со взаимным перекрытием их поля зрения в горизонтальном направлении вдоль возможной траектории полета боеприпаса, ориентацию отдельных ОЭС на направления съемки осуществляют с учетом захвата в поле зрения в вертикальной плоскости «пучка» траекторий, рассчитанных с учетом погрешностей измерений в момент выстрела скорости бросания, угла бросания и азимута, а видеофиксацию ведут поочередным последовательным включением ОЭС.
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2007 |
|
RU2361235C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА (ОЭС) ПОИСКА И СОПРОВОЖДЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2442997C2 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| Установка для вибрационно-вращательного бурения скважин | 1955 |
|
SU106760A1 |
| CN 107561930 A, 09.01.2018 | |||
| US 8046951 B2, 01.11.2011 | |||
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2444464C2 |

