Изобретение относится к приборостроению, в частности к оптико-электронным приборам, предназначенным для поиска и сопровождения целей в сочетании с дальномером, и может быть использовано в системах точного наведения или целеуказания.
Широко известны способы определения дальности до целей без использования отражения или вторичного излучения и устройства автоматического сопровождения целей [1, 2].
Известна [3] система поиска и сопровождения цели с приемником инфракрасного излучения и лазерным дальномером, которая выбрана в качестве прототипа заявляемого устройства. Указанная система состоит из пеленгационного канала, решающего устройства и лазерного дальномера. Пеленгационный канал содержит подвижное зеркало с датчиками углов и приводами по взаимно перпендикулярным осям β1 и ε1, оптическую систему, анализатор изображения с инфракрасным приемником излучения и блок управления. Угловое положение подвижного зеркала измеряется датчиками углов по каждой из осей. Принятое излучение через оптическую систему направляется в анализатор изображения, а отраженное лазерное излучение - в лазерный дальномер. В режиме поиска просмотр пространства осуществляется подвижным зеркалом по сигналам рассогласования, задаваемым решающим устройством по данным целеуказания (ЦУ). Как только пеленгационный канал обнаружит цель, система переключается в режим сопровождения, при котором положение подвижного зеркала управляется сигналами рассогласования, вырабатываемыми пеленгационным каналом. Сигналы рассогласования между оптической осью системы и направлением на цель с блока управления подаются на приводы подвижного зеркала, приводя изображение цели в центр поля зрения анализатора изображения, совмещенный с оптической осью и опорным направлением системы. При выработке нулевого сигнала рассогласования система переходит в режим точного слежения. В этом режиме поле зрения анализатора изображения уменьшается для обеспечения заданной точности сопровождения. В этот момент решающее устройство вырабатывает сигнал на работу лазерного дальномера.
Недостатком прототипа является наличие активного прибора - лазерного дальномера, что демаскирует ОЭС и снижает скрытность ее применения.
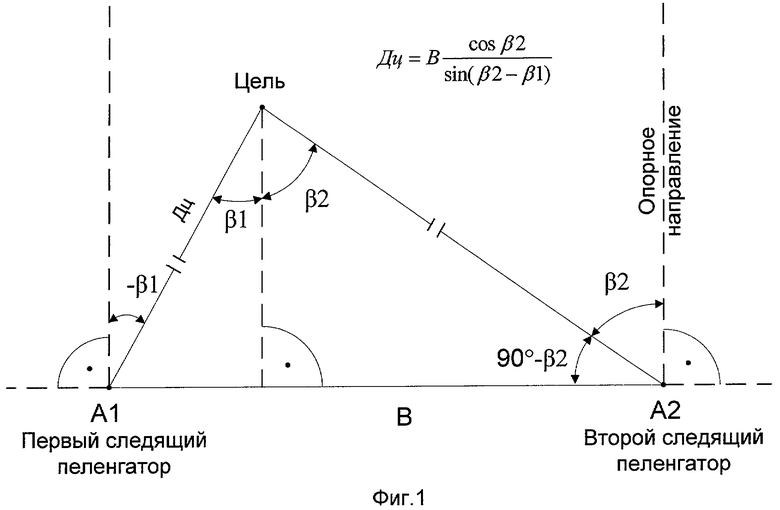
Известен угломерно-базовый способ измерения дальности [4], который выбран в качестве прототипа заявляемого способа, включающий прием излучения цели с помощью двух расположенных на базовом расстоянии друг от друга приемников с остронаправленными антеннами А1 и А2, измерение углов между направлениями приема излучения цели антеннами А1, А2 и опорным направлением соответственно, в качестве которого принимается перпендикуляр к линии А1А2, вычисление дальности до цели по формуле
 ,
,
где Д - расстояние от антенны А1 до цели;
В - базовое расстояние между оптическими осями антенн;
β1, β2 - углы между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными.
Измерение углов производится путем сканирования диаграммами направленности антенн А1 и А2 [2].
Недостатком данного угломерно-базового способа измерения дальности является, во-первых, низкая точность измерения угловых отклонений, а следовательно, и дальности из-за дискретности измерений, обусловленной сканированием диаграммами направленности антенн. Во-вторых, способ обладает низкими поисковыми возможностями.
Задачей предлагаемого изобретения является повышение скрытности ОЭС путем применения угломерно-базового способа определения дальности без использования отражения или вторичного излучения.
Второй задачей также является повышение точности определения дальности до цели угломерно-базовым способом.
Поставленные задачи решаются следующим образом. В известном угломерно-базовом способе определения дальности [4], включающем прием излучения от цели с помощью двух расположенных на базовом расстоянии друг от друга приемников, оснащенных остронаправленными антеннами, измерение углов между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, в качестве которого принимается перпендикуляр к линии А1А2, вычисление дальности до цели по формуле
 ,
,
где Д - расстояние от антенны А1 до цели;
В - базовое расстояние между антеннами;
β1, β2 - углы между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными.
В заявляемом изобретении измерение углов β1, β2 производится датчиками углов путем непрерывного и автоматического совмещения оптических осей антенн А1 и А2 с направлениями приема излучения цели с помощью двух угловых следящих пеленгаторов, расположенных на базовом расстоянии друг от друга.
Поставленные задачи достигаются также и тем, что для измерения углов β1 и β2 в качестве первого углового следящего пеленгатора используется основной пеленгационный канал ОЭС сопровождения по положению, а в качестве второго - вводят в ОЭС дополнительный пеленгационный канал, аналогичный основному и состоящий также из подвижного зеркала с датчиками углов и приводами, оптической системы, анализатора изображения с инфракрасным приемником и блока управления.
Именно заявленные сочетания основного и дополнительного угловых следящих пеленгаторов в ОЭС поиска и сопровождения обеспечивают согласно заявляемому способу и устройству одновременное сопровождение цели и по положению и по дальности в пассивном режиме и тем самым приводят к достижению цели изобретений. Это позволяет сделать вывод, что заявляемые изобретения содержат способ и систему, которые связаны между собой единым изобретательским замыслом.
Заявляемые технические решения отличаются от прототипов тем, что в угломерно-базовом способе измерения дальности до цели без использования отражения или вторичного излучения измерение углов β1 и β2 осуществляется с помощью угловых следящих пеленгаторов, а в ОЭС поиска одновременно с автоматическим сопровождением цели по направлению осуществляется и сопровождение по дальности пассивным способом.
Сравнение заявляемых технических решений с прототипом позволило установить соответствие их критерию «новизна». При изучении других известных технических решений в данной области техники признаки, отличающие заявляемые изобретения от прототипов, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию «существенные отличия».
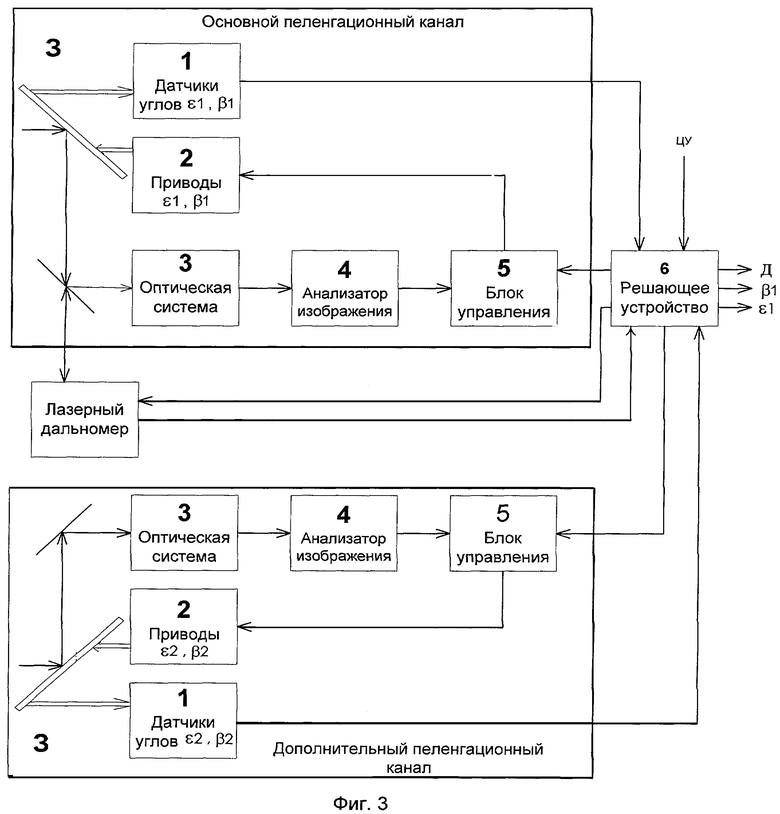
Сущность изобретения поясняется чертежами, где на фиг.1 приведена схема, поясняющая сущность угломерно-базового способа измерения дальности пассивным способом; на фиг.3 представлена структурная схема ОЭС, осуществляющей сопровождение целей одновременно по дальности и по направлению в пассивном режиме, т.е. без использования вторичного излучения или отражения.
ОЭС по первому варианту заявляемого устройства состоит из основного и дополнительного пеленгационных каналов и решающего устройства. В ОЭС может входить также и лазерный дальномер. Основной пеленгационный канал, решающее устройство и лазерный дальномер являются общими и для прототипа.
Основной и дополнительный пеленгационные каналы являются идентичными и каждый в свою очередь состоит из подвижного зеркала 3 с датчиками углов 1 и приводами 2 по двум взаимно перпендикулярным осям β и ε, оптической системы 3, анализатора изображения с приемником инфракрасного излучения 4 и блока управления 5.
Работа заявляемого устройства по первому варианту происходит следующим образом. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом 3 основного пеленгационного канала по сигналам целеуказания, поступающим через решающее устройство 6 и блок управления 5 основного канала на приводы 2 β1, ε1. Как только цель будет обнаружена, система переключается на автосопровождение по положению, при котором подвижное зеркало 3 основного канала управляется сигналами рассогласования, вырабатываемыми основным пеленгационным каналом. Одновременно с этим сигналы с датчиков углов β1, ε1 основного канала поступают через решающее устройство 6 и блок управления 5 дополнительного канала на приводы 2 β2, ε2. дополнительного канала. Происходит наведение подвижного зеркала 3 дополнительного канала на сопровождаемую основным каналом цель. Как только на выходе дополнительного пеленгационного канала появится сигнал, дополнительный канал переходит на сопровождение, при котором положение его подвижного зеркала З управляется сигналом рассогласования, вырабатываемым анализатором изображения 4 дополнительного канала.
При выработке нулевых сигналов рассогласования обоими пеленгационными каналами система переходит в режим точного сопровождения. При этом на выходах датчиков углов 1 основного и дополнительного каналов сигналы β1, ε1, β2, ε2 определяют угловое положение линии визирования цели соответственно основного и дополнительного каналов относительно опорного направления. За опорное направление принимается перпендикуляр к базовому отрезку, расположенный в одной плоскости с линиями визирования и базовым отрезком.
В решающем устройстве 6 определяется дальность до сопровождаемой цели по формуле
 ,
,
где Д - расстояние от центра подвижного зеркала З основного канала до цели;
В - базовое расстояние между центрами подвижных зеркал основного и дополнительного каналов;
β1, β2 - углы между линиями визирования цели основного и дополнительного каналов и опорным направлением соответственно, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными.
В ОЭС по второму варианту основной и дополнительный каналы расположены на платформе, управляемой по взаимно перпендикулярным осям приводами β1 и ε1. Работа заявляемого устройства по второму варианту поясняется на фиг.2 и фиг.3 и состоит в следующем. Как только цель по данным ЦУ будет обнаружена основным пеленгационным каналом, система переключается на автосопровождение по положению, при котором подвижное зеркало 3 основного канала управляется сигналами рассогласования, вырабатываемыми основным пеленгационным каналом. Одновременно с этим сигналы с датчиков углов 1 β1, ε1 основного канала поступают через решающее устройство 6 на электрические приводы, управляющие положением подвижной платформы. Данные приводы отрабатывают сигналы β1, ε1 к нулю, совмещая тем самым опорное направление с направлением на цель. Алгоритм работы дополнительного канала при этом не отличается от алгоритма работы по первому варианту.
При выработке нулевых сигналов рассогласования обоими пеленгационными каналами и отработки углов β1=0, ε1=0, в решающем устройстве определяется дальность до сопровождаемой цели по формуле
 .
.
На практике угол β2 имеет малое значение, тогда выражение для определения дальности можно упростить:
 ,
,
где β2 - угол, выраженный в радианах.
Все элементы заявляемого устройства широко известны и могут быть выполнены, например, так же, как в источниках [2, 3].
Использование заявляемых изобретений позволяет повысить скрытность применения ОЭС поиска и сопровождения целей, а также повысить точность измерения дальности до цели угломерно-базовым способом.
Источники информации
1. Грейм И.А. Оптические дальномеры и высотомеры. - М.: Недра, 1983, с.101-104.
2. Криксунов Л.З. Системы информации с оптическими квантовыми генераторами. - Киев: Техника, 1970, с.203-204.
3. Патент РФ RU 2155323 С1 от 24.02.2000 г. (прототип).
4. Патент РФ RU 2184981 С1 от 18.10.2002 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2007 |
|
RU2335728C1 |
| СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2019 |
|
RU2724240C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |

Изобретение относится к приборостроению, в частности к оптико-электронным приборам, предназначенным для поиска и сопровождения целей в сочетании с дальномером, и может быть использовано в системах точного наведения или целеуказания. Заявленное изобретение основывается на триангуляционном методе измерения расстояния. В качестве измерителей углов в данном изобретении используются оптические пеленгационные устройства, установленные на базовом расстоянии друг от друга. При этом указанные устройства обеспечивают непрерывное и автоматическое совмещение своих оптических осей с направлением на цель. Заявленное изобретение обеспечивает повышение точности измерения дальности и повышение скрытности применения ОЭС. 2 н. и 1 з.п. ф-лы, 3 ил.
1. Способ измерения дальности в оптико-электронной системе (ОЭС) поиска и сопровождения целей, включающий
прием излучения цели с помощью двух расположенных на базовом расстоянии друг от друга приемников, оснащенных остронаправленными антеннами А1 и А2;
измерение углов между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, в качестве которого принимается перпендикуляр к линии А1 А2;
вычисление дальности до цели по формуле
 ,
,
где Д - дальность от антенны А1 до цели;
В - длина базового отрезка между оптическими осями антенн А1 и А2;
β1, β2 - углы между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными,
измерение углов β1, β2 производится путем сканирования антенн А1 и А2, отличающийся тем, что измерение углов производят двумя следящими пеленгационными устройствами, элементами которых являются приемники излучения цели с остронаправленными антеннами А1 и А2 и датчики углов β1 и β2, при этом оптические оси антенн А1 и А2 непрерывно и автоматически совмещаются с направлением на цель, а нулевые положения датчиков β1, β2 совмещены с опорным направлением.
2. Оптико-электронная система (ОЭС) поиска и сопровождения цели, состоящая из лазерного дальномера, решающего устройства, пеленгационного канала, формирующего для автоматического сопровождения цели по направлению сигнал рассогласования между оптической осью канала и направлением на цель и содержащего антенну А1 в составе с подвижным зеркалом З, с датчиками углов β1, ε1 и приводами β1, ε1 по двум взаимно перпендикулярным осям и с оптической системой, анализатор изображения с приемником излучения и блок управления, отличающаяся тем, что в ОЭС введен дополнительный пеленгационный канал, аналогичный основному и расположенный от него на базовом расстоянии В, использующийся в режиме точного сопровождения цели по направлению, антенна А2 которого для перехода на автоматическое сопровождение предварительно наводится на цель сигналами управления β1, ε1 основного пеленгационного канала, а с выходов датчиков углов пеленгационных каналов, нулевые положения которых совмещены с опорным направлением, сигналы, пропорциональные углам β1, β2, поступают на входы решающего устройства для вычисления дальности до цели по формуле
 ,
,
где Д - дальность от антенны А1 до цели;
В - длина базового отрезка между оптическими осями антенн А1 и А2;
β1, β2 - углы между направлениями приема излучения цели антеннами А1 и А2 и опорным направлением соответственно, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными.
3. Оптико-электронная система поиска и сопровождения по п.2, отличающаяся тем, что основной и расположенный от него на базовом расстоянии В дополнительный пеленгационные каналы размещены на подвижной платформе с приводами, управляемой по двум взаимноперпендикулярным осям сигналами основного канала β1 и ε1 с выхода решающего устройства таким образом, что опорное направление и оптическая ось антенны А1 совпадают по направлению, и углы β1=0, ε1=0, а сигнал, пропорциональный углу β2, имеющему на практике малое значение, поступает на вход решающего устройства для вычисления дальности до цели по формуле
 ,
,
где Д - дальность от антенны А1 до цели;
В - длина базового отрезка между оптическими осями антенн А1 и А2;
β2 - угол, выраженный в радианах, между направлением приема излучения цели антенной А2 и опорным направлением, причем угловые отклонения влево от опорного направления считаются положительными, а вправо - отрицательными.
| УГЛОМЕРНО-БАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2001 |
|
RU2184981C1 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| Устройство для фиксации позвоночника | 1982 |
|
SU1066581A1 |
| US 4806936 A, 21.02.1989 | |||
| WO 9930182 А1, 17.06.1999. | |||

