Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования в звуковом диапазоне частот для обнаружения объектов.
Гидроакустическое обнаружение сводится к принятию решения о наличии или отсутствии полезного сигнала (объекта). Поскольку прием полезного сигнала происходит в присутствии помех, задача обнаружения является статистической, а решение принимается с той или иной вероятностью, определяющей качество обнаружения.
Известен одноканальный гидроакустический обнаружитель [1], формирующий характеристику направленности в одном направлении, и осуществляющий, при необходимости, сканирование пространства путем поворота характеристики направленности. Известны многоканальные обнаружители [2-4], реализующие одновременный обзор пространства веером характеристик направленности. Основой для всех этих способов является типовой приемный тракт [5], в котором последовательно соединены приемная антенна, полосовой фильтр, детектор, интегратор и пороговое устройство. Недостаток этих способов начинает проявляться при работе на подвижном носителе, когда особенности конструкции обтекателя или его крепления вызывают формирование локальных в секторе наблюдения гидродинамических помех, которые в силу своей интенсивности могут быть ложно обнаружены как сигналы объектов. Известен способ распознавания ложных целей, вызванных собственными помехами подвижного носителя [6]. В основу способа заложено свойство таких помех сохранять постоянное значение пространственной координаты относительно носителя. Однако, для реализации способа носитель должен совершить маневр, что не всегда возможно из тактических соображений или недостатка времени.
Наиболее близким аналогом по используемым принципам работы и составу операций к предлагаемому изобретению является способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта [7], в котором совместная обработка спектров двух полуантенн (половин одной многоэлементной гидроакустической антенны) позволяет устранить влияние спектра помехи и обеспечить правильное определение спектральных классификационных признаков.
Способ [7] содержит следующие процедуры:
принимают шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой, двумя полуантеннами гидроакустической антенны,
переводят шумовой процесс каждой полуантенны в частотную область, суммируют спектры мощности с выходов двух полуантенн, получая частотные отсчеты спектра суммы 
находят разность спектров мощности с выходов двух полуантенн, получая частотные отсчеты спектра разности 
определяют разностный спектр мощности 
анализируют частотную зависимость разностного спектра, осуществляя обнаружение дискретных составляющих,
классифицируют наблюдаемый процесс по частоте дискретной составляющей разностного спектра.
Этот способ корректно работает, если в принимаемом шумовом процессе действительно присутствует сигнал морского объекта. Однако, если в принимаемом шумовом процессе присутствует только помеха, например, локальная гидродинамическая помеха, которая может иметь большую интенсивность и содержать, в том числе, отдельные дискретные составляющие, то классификация будет произведена неверно. Это связано с тем, что в указанном способе не предусмотрены процедуры для исключения обнаружения ложных целей, вызванных собственными помехами подвижного носителя, что является его недостатком.
Задачей заявляемого способа является снижение вероятности ложной тревоги при обнаружении и классификации источников сигналов (объектов) гидроакустическими станциями, установленными на движущихся носителях без необходимости их маневра путем исключения обнаружения ложных целей.
Для решения поставленной задачи в способ обнаружения шумящих в море объектов, в котором принимают шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой, двумя полуантеннами гидроакустической антенны, переводят шумовой процесс каждой полуантенны в частотную область, суммируют спектры мощности с выходов двух полуантенн, получая частотные отсчеты спектра суммы  находят разность спектров мощности с выходов двух полуантенн, получая частотные отсчеты спектра разности
находят разность спектров мощности с выходов двух полуантенн, получая частотные отсчеты спектра разности  определяют порог обнаружения,
определяют порог обнаружения,
введены новые признаки, а именно
получают интегральную мощность в канале суммы, суммируя отсчеты спектра суммы 
получают интегральную мощность в канале разности, суммируя отсчеты спектра разности 
формируют характеристику обнаружения как разность между интегральной мощностью в канале суммы и мощностью в канале разности q=РΣ-РΔ,
сравнивают характеристику обнаружения с порогом обнаружения,
при превышении порога считают, что шумящий в море объект обнаружен.
Техническим результатом изобретения является устранение обнаружения ложных целей, вызванных сигналами локальных в секторе наблюдения гидродинамических помех при движении носителя, то есть снижение вероятности ложной тревоги при обнаружении и классификации морских объектов. При этом маневр носителя не требуется.
Покажем возможность достижения указанного технического результата предложенным способом.
Основными новыми процедурами предлагаемого способа являются процедуры получения интегральных мощностей в канале суммы и канале разности, то есть:
С учетом процедур ограничительной части формулы, имеем:
где а(ω) и b(ω) - шумовые процессы на выходах двух полуантенн, переведенные в частотную область.
Согласно теореме Парсеваля [8], интегральная мощность, полученная в частотной области, сохраняется при переходе во временную область, то есть для рассматриваемых интегральных мощностей можно записать:
где a(t) и b(t) - исходные шумовые процессы на выходах двух полуантенн во временной области.
Анализируя запись во временной области, и возводя в квадрат выражение под знаком суммы, получим:
Можно заметить, что слагаемое 2Σta(t)b(t), которое присутствует в обоих выражениях, является удвоенным значением корреляционной функции между процессами a(t) и b(t).
В случае, если процессы a(t) и b(t) не коррелированы, что характерно для сигналов локальных в секторе наблюдения гидродинамических помех, то значение корреляционной функции между ними при достаточном времени накопления будет стремиться к нулю  Тогда мощности суммарного и разностного процессов будут стремиться к одному значению, а именно к сумме мощностей обоих процессов
Тогда мощности суммарного и разностного процессов будут стремиться к одному значению, а именно к сумме мощностей обоих процессов 
 В этом случае, характеристика обнаружения, формируемая как разность между мощностями суммарного и разностного процессов, будет стремиться к нулю РΣ-РΔ→0, что меньше установленного порога для обнаружения истинного сигнала и приведет к невозможности обнаружения ложных сигналов гидродинамических помех.
В этом случае, характеристика обнаружения, формируемая как разность между мощностями суммарного и разностного процессов, будет стремиться к нулю РΣ-РΔ→0, что меньше установленного порога для обнаружения истинного сигнала и приведет к невозможности обнаружения ложных сигналов гидродинамических помех.
Если на двух полуантеннах присутствует сигнал от истинной цели, то при нулевой задержке по времени имеем a(t)=b(t). Тогда получим РΣ=Σt(а(t)+b(t))2→PS, где PS - мощность сигнала истинной цели, и РΔ=Σt(a(t)-b(t))2→0. Таким образом, после процедуры вычитания РΣ-РΔ на пороговую схему подается мощность сигнала PS и принимается правильное решение об обнаружении истиной цели.
Таким образом, дополнительные процедуры способа, реализующие получение интегральной мощности в канале суммы и канале разности, позволили распознать и исключить из входного процесса некоррелированную составляющую гидродинамической помехи, что в результате применения пороговой схемы приводит к устранению обнаружения ложных целей, вызванных гидродинамическими сигналами от движущегося носителя.
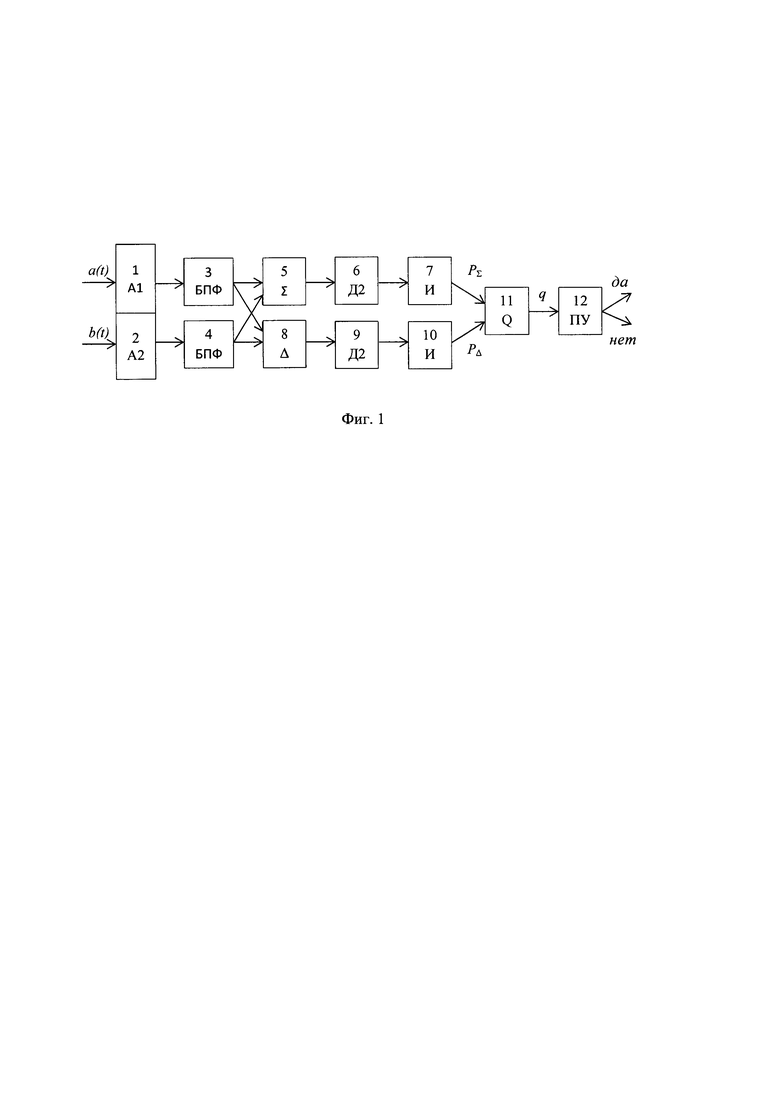
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ обнаружения шумящих в море объектов.
На фиг. 1 гидроакустическая многоэлементная антенна разделена на две полуантенны А1 (первая полуантенна) и А2 (вторая полуантенна), которые обозначены блоками 1 и 2, соответственно. Выход блока 1 соединен с входом блока 3 БПФ (блок быстрого преобразования Фурье), а выход блока 2 соединен с входом блока 4 БПФ. Два идентичных выхода блока 3 соединены с первым входом блока 5 Σ (блок суммы) и первым входом блока 8 Δ (блок разности). Два идентичных выхода блока 4 соединены со вторым входом блока 5 Σ и вторым входом блока 8 Δ. Выход блока 5 соединен с входом последовательно соединенных блоков 6 Д2 (квадратичный детектор) и 7 И (интегратор). Выход блока 8 соединен с входом последовательно соединенных блоков 9 Д2 и 10 И. Выходы блоков 7 и 10 соединены с первым и вторым входами блока 11 Q (блок формирования характеристики обнаружения). Выход блока 11 соединен с входом блока 12 ПУ (пороговое устройство). Последовательно соединенные блоки 5,6,7 будем называть каналом суммы, а последовательно соединенные блоки 8,9,10 - каналом разности.
В динамике работы системы шумопеленгования предлагаемый способ реализуется следующим образом. Первая полуантенна А1 (блок 1) принимает шумовой процесс a(t). Одновременно вторая полуантенна А2 (блок 2) принимает шумовой процесс b(t). Оба процесса независимо в идентичных блоках БПФ (блоки 3 и 4) переводятся в частотную область. Для этого может использоваться процедура быстрого преобразования Фурье [8]. Далее оба процесса в частотной области поступают на вход канала суммы (блок 5) и на вход канала разности (блок 8). В блоке 5 осуществляется процедура суммирования коэффициентов Фурье входных процессов а(ω)+b(ω), а в блоке 8 - процедура вычитания коэффициентов Фурье одного входного процесса из другого а(ω)-b(ω). Далее в обоих каналах осуществляются идентичные процедуры, характерные для типового тракта обнаружения сигнала [5]: квадратичное детектирование (блоки 6 и 9) и интегрирование, под которым в данном случае понимается суммирование по частоте в частотной полосе сигнала (блоки 7 и 10). В результате выполнения этих процедур на выходе блока 7 имеем интегральную мощность суммарного процесса PΣ=Σω|a(ω)+b(ω)|2, а на выходе блока 10 интегральную мощность разностного процесса РΔ=Σω|а(ω)-b(ω)|2. В блоке 11 осуществляется формирование характеристики обнаружения q как разности между мощностью суммарного и разностного процессов РΣ-РΔ. Характеристика обнаружения подается, на пороговое устройство (блок 12), в котором принимается решение об обнаружении или отсутствии обнаружения сигнала объекта. Порог обнаружения выбирается, например, на основании заданной вероятности ложных тревог [9].
Все изложенное позволяет считать задачу изобретения решенной. Предложен гидроакустический способ обнаружения шумящих в море объектов, адаптированный для применения на подвижных носителях. Способ позволяет обнаруживать шумящие в море объекты и исключает обнаружение ложных целей, вызванных собственными гидродинамическими помехами подвижного носителя.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение. 1981. 265 с.
2. Антипов В.А., Величкин С.М., Обчинец О.Г, Подгайский Ю.П., Янпольская А.А. Патент РФ №2300118 от 29.08.2005. Способ обнаружения шумящих в море объектов, МПК G01S3/80.
3. Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S3/80.
4. Антипов В.А., Величкин С.М., Подгайский Ю.П. Патент РФ №2339050 от 20.11.2008. Способ обнаружения шумящих в море объектов. МПК G01S3/80, G01S15/04.
5. Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. Л.: Судостроение. 1988. 552 с.
6. Брага Ю.А., Смирнов А.С, Тимофеев В.Н. Патент РФ №2514154 от 27.04.2014. Способ распознавания ложных целей, вызванных собственными помехами подвижного носителя. МПК G01S13/02.
7. Афанасьев А.Н., Знаменская Т.К. Патент РФ №2546851 от 10.04.2015. Способ классификации гидроакустических сигналов шумоизлучения морского объекта. МПК G01S3/80
8. Сергиенко А.Б. Цифровая обработка сигналов. СПб.: Питер. 2003. 604 с.
9. Тюрин A.M. Введение в теорию статистических методов в гидроакустике. Л.: 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ обнаружения морского движущегося объекта | 2020 |
|
RU2759416C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| Устройство классификации шумящих объектов | 2017 |
|
RU2694271C2 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОИЗМЕЩЕНИЯ НАДВОДНОГО КОРАБЛЯ ПРИ ЕГО ШУМОПЕЛЕНГОВАНИИ | 2016 |
|
RU2645013C1 |
Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования для обнаружения объектов. Способ основан на приеме шумовой процесса, состоящего из аддитивной смеси сигнала шумоизлучения морского объекта с помехой, двумя полуантеннами гидроакустической антенны переводе принятого процесса в частотную область, и организации двух каналов обработки: канала суммы и канала разности. Процесс на входе канала суммы получают суммированием спектров мощности двух полуантенн, а процесс на входе канала разности получают в результате разности спектров мощности двух полуантенн. При реализации способа осуществляют интегрирование в частотной полосе сигнала для процессов суммы и разности отдельно, получая интегральную мощность суммарного PΣ и интегральную мощность разностного РΔ процессов, затем формируют характеристику обнаружения как разность между мощностью суммарного и разностного процессов PΣ-РΔ и сравнивают характеристику обнаружения с порогом, при превышении которого считают, что объект обнаружен. Техническим результатом изобретения является устранение обнаружения ложных целей, вызванных сигналами локальных в секторе наблюдения гидродинамических помех при движении носителя, то есть снижение вероятности ложной тревоги при обнаружении морских объектов. При этом маневр носителя не требуется. 1 ил.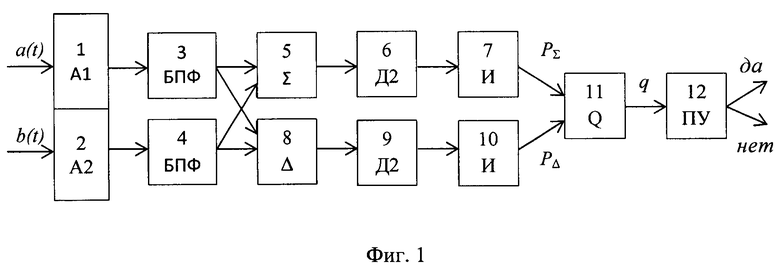
Способ обнаружения шумящих в море объектов, в котором принимают шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой, двумя полуантеннами гидроакустической антенны, переводят шумовой процесс каждой полуантенны в частотную область, суммируют спектры мощности с выходов двух полуантенн, получая частотные отсчеты спектра суммы  находят разность спектров мощности с выходов двух полуантенн, получая частотные отсчеты спектра разности
находят разность спектров мощности с выходов двух полуантенн, получая частотные отсчеты спектра разности  определяют порог обнаружения, отличающийся тем, что получают интегральную мощность в канале суммы, суммируя отсчеты спектра суммы
определяют порог обнаружения, отличающийся тем, что получают интегральную мощность в канале суммы, суммируя отсчеты спектра суммы  получают интегральную мощность в канале разности, суммируя отсчеты спектра разности
получают интегральную мощность в канале разности, суммируя отсчеты спектра разности  формируют характеристику обнаружения как разность между интегральной мощностью в канале суммы и мощностью в канале разности q=PΣ-РΔ, сравнивают характеристику обнаружения с порогом обнаружения, при превышении порога считают, что шумящий в море объект обнаружен.
формируют характеристику обнаружения как разность между интегральной мощностью в канале суммы и мощностью в канале разности q=PΣ-РΔ, сравнивают характеристику обнаружения с порогом обнаружения, при превышении порога считают, что шумящий в море объект обнаружен.
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ИНТЕГРАЦИИ СИСТЕМ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2014 |
|
RU2572792C1 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ В МЕЛКОМ И ГЛУБОКОМ МОРЕ | 2017 |
|
RU2653189C1 |

