Область применения.
Стыковочно-монтажный модуль относится к области космических кораблей и их оборудования, системам стыковки и расстыковки космических кораблей и их частей.
Уровень техники.
Стыковка космических кораблей и их частей в космическом пространстве является наиболее сложным и опасным процессом на этапе рабочей фазы полета. Сближение, контакт, захват, стягивание. В каждом из этих этапов заключено множество сложностей. Сближение выполняется по законам баллистики с постоянной коррекцией двигателями ориентации с интенсивным расходованием рабочего тела.
Особенно сложным является заключительный этап, когда необходимо попасть в стыковочное устройство, имеющее небольшие габариты, обусловленные тем, что узел со стыковочным устройством после стыковки входит внутрь корабля, открывая проем входного люка.
Контакт – очень опасная фаза так, как масса стыкующихся объектов достигает значительных величин и погасить инерцию больших масс особенно на современных многозвенных объектах крайне сложно. Захват и стягивание операции ввиду конструктивных особенностей, применяемых устройств стыковки выполняются с помощью центрального (штыревого) элемента несущего на себе всю нагрузку и не имеющего дублирующих деталей.
В качестве аналогов известны:
Стыковочное устройство патент US 4722753 B 64G1/64 1987г.
Комплекс, содержащий узел стыковки, конус которого расположен на одном корабле, а штырь на другом, включает захват с тросом и метательную установку, закрепленную на одном аппарате.
Надувное устройство захвата патент РФ 2503593 B64G 1/64 10.01.2014г.
Состоит из надувного корпуса конической формы надуваемого вокруг входного-выходного шлюза, с целью направлять движение космического объекта к шлюзу или от него.
Способ стыковки космических аппаратов патент РФ 2521082 B64 G1/64 27.06.2014г.
Включающий использование самонаводящегося буксира для доставки троса, оснащенного стыковочным узлом для последующего сближения методом стягивания.
Наиболее близким аналогом по мнению заявителя является способ стыковки космических аппаратов патент РФ 2521082 B64G1/64 27.06.2014г.
Цель изобретения.
Целью изобретения стыковочно-монтажный модуль является поиск конструктивных решений, позволяющих приблизится к решению проблем, возникающих в ходе процесса стыковки и объединении процесса стыковки и монтажа пристыкованного элемента в конструкцию космического аппарата-носителя.
Основные задачи: совместить в конструкции стыковочно-монтажного модуля функции стыковочных операций – захват, амортизацию реактивных реакций, стягивание, фиксацию космического объекта, перемещение к монтажному узлу и монтаж данного объекта.
Стыковочно-монтажный модуль состоящий из стыковочного устройства и исполнительно-монтажного механизма отличается тем, что стыковочное устройство состоит из двух пневматических рабочих блоков 1 фиг.1 по четыре пневмоэлемента 2 фиг.1 каждый. Пневмоэлементы, состоящие из гофрированных рукавов 3 фиг.1 с кабель-тросом 4 фиг.1, размещенные в корпусах внутри пневматических блоков 1 фиг.1 соединены со стыковочной платформой, состоящей из крышки основания стыковочной платформы 5 фиг.1, направляющих подвижно-поворотных элементов 6 фиг.1 с закрепленными на направляющих стыковочными, регулирующимися по положению захватами 7 фиг.1 и защитной конструкцией 8 фиг.1. Пневматические рабочие блоки закреплены на поворотном основании 9 фиг.1, оснащенном двумя симметрично расположенными манипуляторами 10 фиг.1 поворотное основание закреплено на каретке 11 фиг.1, перемещающейся по базовым трекам 12 фиг.1 космического аппарата-носителя 13 фиг.1 с расположенными на нем монтажными узлами 14 фиг.1.
В зависимости от конкретных задач стыковочная платформа может быть оборудована различными стыковочными узлами. На фиг.1 изображен эскиз стыковочного узла для «бортового направления» стыковки с космическим аппаратом.
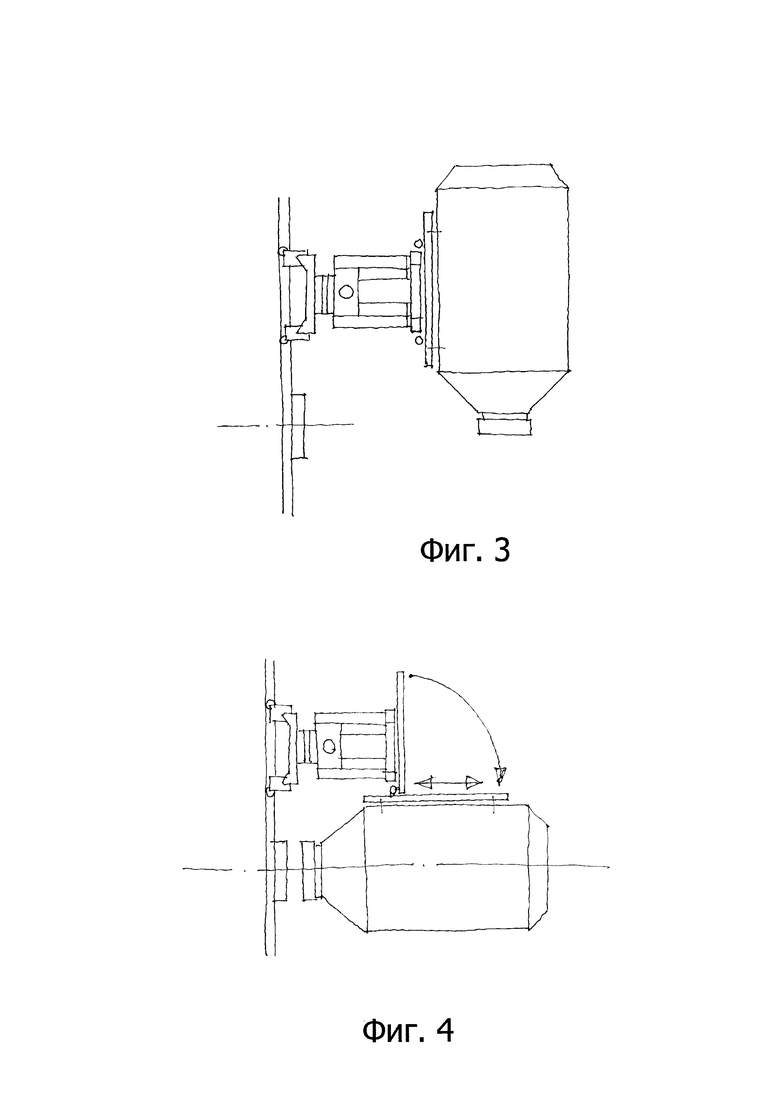
Подавая рабочее тело в пневмоэлементы с одновременным разматыванием кабель-тросов, стыковочная платформа выдвигается на заданное расстояние от стыковочно-монтажного модуля. Изменяя давление в пневмоэлементах и регулируя длину кабель-тросов можно управлять положением стыковочной платформы. После захвата и фиксации космического аппарата стыковочными захватами и нейтрализации инерционных моментов происходит процесс стягивания космического аппарата и стыковочно-монтажного модуля фиг.2.
После стягивания и фиксации стыковочной платформы фиг.3 стыковочно-монтажный модуль поротом направляющих подвижно-поворотных элементов 6 фиг.1 и движением каретки 11 фиг.1 по базовым трекам совмещает оси монтажных узлов фиг.4 перемещением подвижных элементов 6 фиг.1 монтаж завершается. Манипуляторы расположенные на стыковочно-монтажном модуле могут использоваться в операциях стыковки и монтажа как резервные механизмы и перемещать стыковочно-монтажный модуль (в сложенном состоянии) в разные точки аппарата-носителя.
Процессы демонтажа и расстыковки происходят в обратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стыковки космических аппаратов | 2019 |
|
RU2726340C1 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| ДОЛГОВРЕМЕНЫЙ ПИЛОТИРУЕМЫЙ ОРБИТАЛЬНЫЙ ТРОСОВЫЙ КОМПЛЕКС | 1993 |
|
RU2088491C1 |
| Механизм для запуска наноспутников | 2023 |
|
RU2829378C1 |
| Зависимая подвеска транспортных средств с наклоном рамы, грузовой платформы, кузова в сторону поворота | 2020 |
|
RU2733014C1 |
| СТАНЦИЯ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ КОСМИЧЕСКИХ КОРАБЛЕЙ (ВАРИАНТЫ) | 2021 |
|
RU2770609C1 |
| Стыковочный агрегат летательного аппарата | 1990 |
|
SU1744003A1 |
| Подвеска транспортного средства с динамическим управлением наклоном колес и кузова в сторону поворота | 2019 |
|
RU2721373C1 |
| Подвеска спортивного автомобиля с наклоном колес и кузова в сторону поворота с динамикой подвижных элементов | 2020 |
|
RU2838183C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2072951C1 |
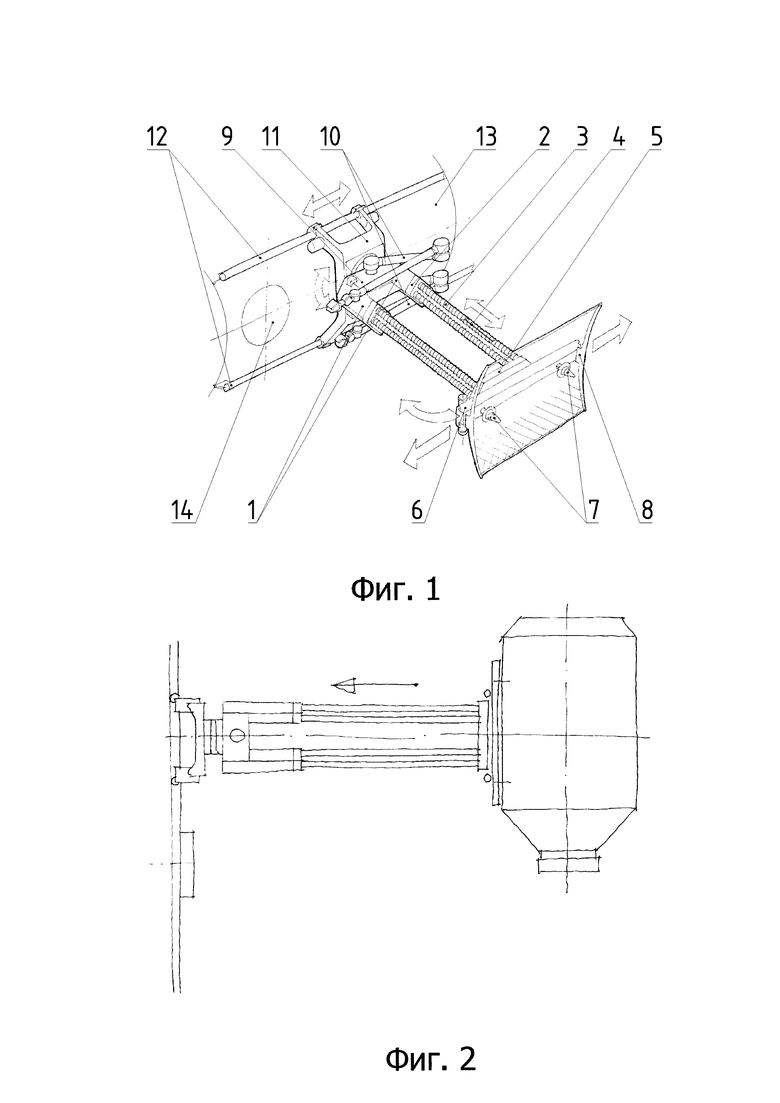
Изобретение относится к области космической техники, а более конкретно к системам стыковки и расстыковки космических кораблей и их частей. Стыковочно-монтажный модуль состоит из стыковочного устройства и исполнительно-монтажного механизма. Стыковочное устройство состоит из рабочих блоков по четыре пневмоэлемента. Пневмоэлементы, состоящие из гофрированных рукавов с кабель-тросом, размещённые в корпусах внутри пневматических блоков, соединены со стыковочной платформой. Платформа состоит из основания стыковочной платформы, направляющих подвижно-поворотных элементов с закрепленными на направляющих стыковочными регулирующимися по положению захватами и защитной конструкцией. Пневматические блоки закреплены на поворотном основании, оснащенном манипуляторами. Поворотное основание закреплено на каретке, перемещающейся по базовым трекам аппарата-носителя с расположенными на нем монтажными узлами. Достигается упрощение в использовании. 4 з.п. ф-лы, 4 ил.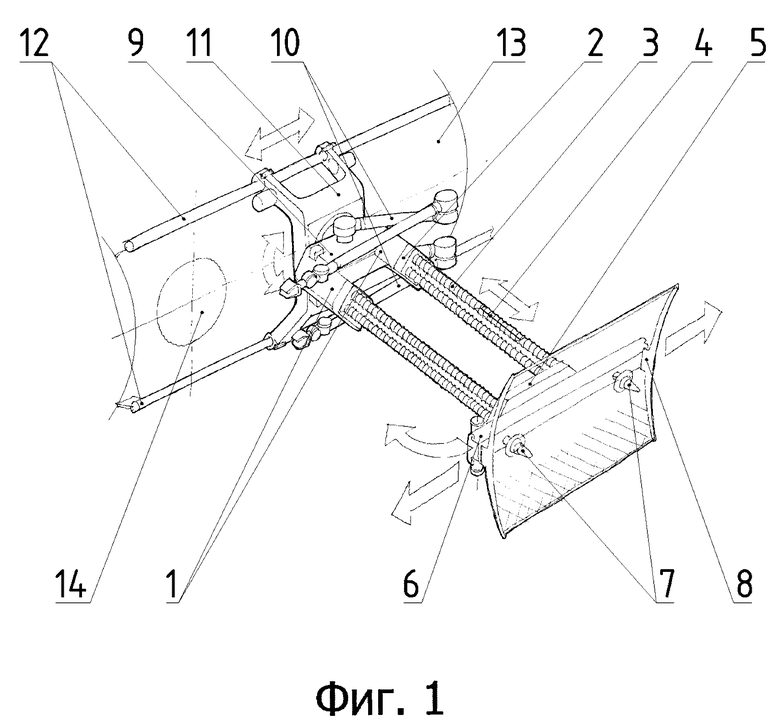
1. Стыковочно-монтажный модуль, состоящий из стыковочного устройства и исполнительно-монтажного механизма, отличается тем, что стыковочное устройство состоит из рабочих блоков по четыре пневмоэлемента, пневмоэлементы, состоящие из гофрированных рукавов с кабель-тросом, размещённые в корпусах внутри пневматических блоков, соединены со стыковочной платформой, состоящей из основания стыковочной платформы, направляющих подвижно-поворотных элементов с закрепленными на направляющих стыковочными регулирующимися по положению захватами и защитной конструкцией, пневматические блоки закреплены на поворотном основании, оснащенном манипуляторами, поворотное основание закреплено на каретке, перемещающейся по базовым трекам аппарата-носителя с расположенными на нем монтажными узлами.
2. Модуль по п.1 отличается тем, что стыковочная платформа может быть оборудована различными стыковочными узлами.
3. Модуль по п.1 отличается тем, что, изменяя давление в пневмоэлементах и регулируя длину кабель-тросов, можно управлять положением стыковочной платформы.
4. Модуль по п.1 отличается тем, что поворотом направляющих подвижно-поворотных элементов и движением каретки по базовым трекам можно совмещать оси монтажных узлов.
5. Модуль по п.1 отличается тем, что манипуляторы могут использоваться в операциях стыковки и монтажа как резервные механизмы и перемещать стыковочно-монтажный модуль в разные точки аппарата-носителя.
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| ПЛАТФОРМА ПОВОРОТНАЯ ДЛЯ КРЕПЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2003 |
|
RU2238888C1 |
| УСТРОЙСТВО СТЫКОВКИ ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2002 |
|
RU2226483C1 |
| СПОСОБ КАТАЛИТИЧЕСКОГО ГИДРИРОВАНИЯ ТЯЖЕЛЫХ ОСТАТКОВ ОКСОСИНТЕЗА | 0 |
|
SU164263A1 |
| US 2009294595 A1, 03.12.2009 | |||
| US 9463884 B2, 11.10.2016 | |||
| US 9809327 B2, 07.11.2017. | |||

