Изобретение относится к области систем управления самолетом в продольном канале и предназначено для обеспечения взаимодействия режимов ручного и автоматического управления.
Существующие способы ручного и автоматического управления маневренными самолетами основаны на использовании в своей работе двух типов приводов рулевых поверхностей (руля высоты): линейный (пропорциональный) привод (так называемая рулевая машина) и привод интегрального типа - механизм триммерного эффекта (МТЭ) (Якубович М.М. Автоматизация управления самолетом на основе разделения управляющих движений во времени // Проблемы машиностроения и надежности машин. 1997, №3, с. 97). Шток рулевой машины изменяет свое положение пропорционально входному сигналу, перемещение штока МТЭ является результатом интегрирования входного сигнала.
Известен способ управления самолетом с последовательной схемой_совместной работы МТЭ и рулевой машины, когда в режиме автоматического управления руль высоты отклоняется гидравлическим бустером пропорционально входному управляющему сигналу с помощью последовательно включенной в механическую проводку управления рулевой машины (типа раздвижной тяги) с ограниченным ходом штока (Якубович М.М. Автоматизация управления самолетом на основе разделения управляющих движений во времени // Проблемы машиностроения и надежности машин. 1997, №3, с. 98, пятый абзац). При выходе штока рулевой машины на предельное значение в работу включается МТЭ, перемещающий далее ручку управления самолетом (РУС), а затем через проводку управления и бустер руль высоты с постоянной тоже ограниченной по величине скоростью. Предельные значения перемещения штока рулевой машины и скорости перемещения штока МТЭ выбираются из условия отказобезопасности системы автоматического управления так, чтобы при отказах приводов летчик был в состоянии осознать и парировать возникшую нештатную ситуацию. Способ автоматического управления отличается высокой надежностью с точки зрения парирования отказов приводов, но в силу наложенных ограничений на максимальные значения перемещения штока рулевой машины и скорости перемещения штока МТЭ динамические характеристики процессов управления самолетом также ограничиваются. В режиме ручного управления руль высоты отклоняется летчиком через РУС. Перемещение РУС может корректироваться с помощью МТЭ (через загрузочный механизм) при выставке руля высоты в балансировочное положение.
Известен способ автоматического управления самолетом с параллельной работой МТЭ и рулевой машины, когда на входы приводов одновременно подается один и тот же сигнал управления, а перемещение руля высоты складывается из перемещения штока рулевой машины и перемещения штока МТЭ (Якубович М.М. Автоматизация управления самолетом на основе разделения управляющих движений во времени // Проблемы машиностроения и надежности машин. 1997, №3, с. 100, пункт 7). Ход штока рулевой машины также ограничен по величине, скоростная характеристика МТЭ линейна и тоже ограничена по величине, что по-прежнему накладывает ограничения на динамические характеристики процессов управления самолетом. В ручном управлении самолетом руль высоты перемещается по-прежнему с помощью РУС с коррекцией балансировочного положения от МТЭ.
В рассмотренных способах управления самолетом переход из ручного режима управления в автоматический и обратно осуществляется практически «безударно» - без существенных изменений положения руля высоты и, соответственно - перегрузки. Обеспечивается это за счет ограниченного перемещения штока рулевой машины в небольших пределах.
С появлением современных электро-гидравлических рулевых приводов, заменивших собой гидравлические бустеры и коротко-ходовые рулевые машины, стало возможным использовать в режимах автоматического управления самолетом полное (неограниченное) отклонение руля высоты. В этой связи безударный переход из режима ручного управления самолетом в автоматический режим и обратно требует специальной организации их взаимодействия.
Целью изобретения является обеспечение «безударного» (без скачкообразных изменений перегрузки) перехода из режима ручного управления самолетом в режим автоматического управления и обратно и улучшение динамических характеристик системы автоматического управления (САУ).
Поставленная цель достигается за счет того, что предлагаемый способ согласования режимов ручного и автоматического управления самолетом в продольном движении, предусматривает использование механизма триммерного эффекта (МТЭ), ручки управления самолетом (РУС), связанных друг с другом через загрузочный механизм, привод, обеспечивающий отклонение руля высоты самолета в полном рабочем диапазоне, на вход привода выборочно поступают предварительно сформированные либо сигнал ручного управления от РУС, либо сигнал автоматического управления от САУ. В момент перехода из ручного в автоматический режим управления на входе привода формируется сигнал автоматического управления с выхода САУ с предварительно внесенным в него начальным значением, равным значению сигнала ручного управления, зафиксированного на момент смены режима управления, МТЭ переводится в режим слежения сигнала ручного управления за сигналом автоматического управления за счет подключения на его вход разности этих сигналов. При обратном переходе из режима автоматического управления в режим ручного управления на входе привода формируется сумма сигнала ручного управления и сигнала, сформированного в виде разности сигналов автоматического и ручного управления, зафиксированных в момент смены режима управления, с последующим списыванием этой разности сигналов до нуля за определенное время, при этом сигнал на входе МТЭ обнуляется и летчику оставляется возможность управления им вручную для корректировки балансировочного положения РУС.
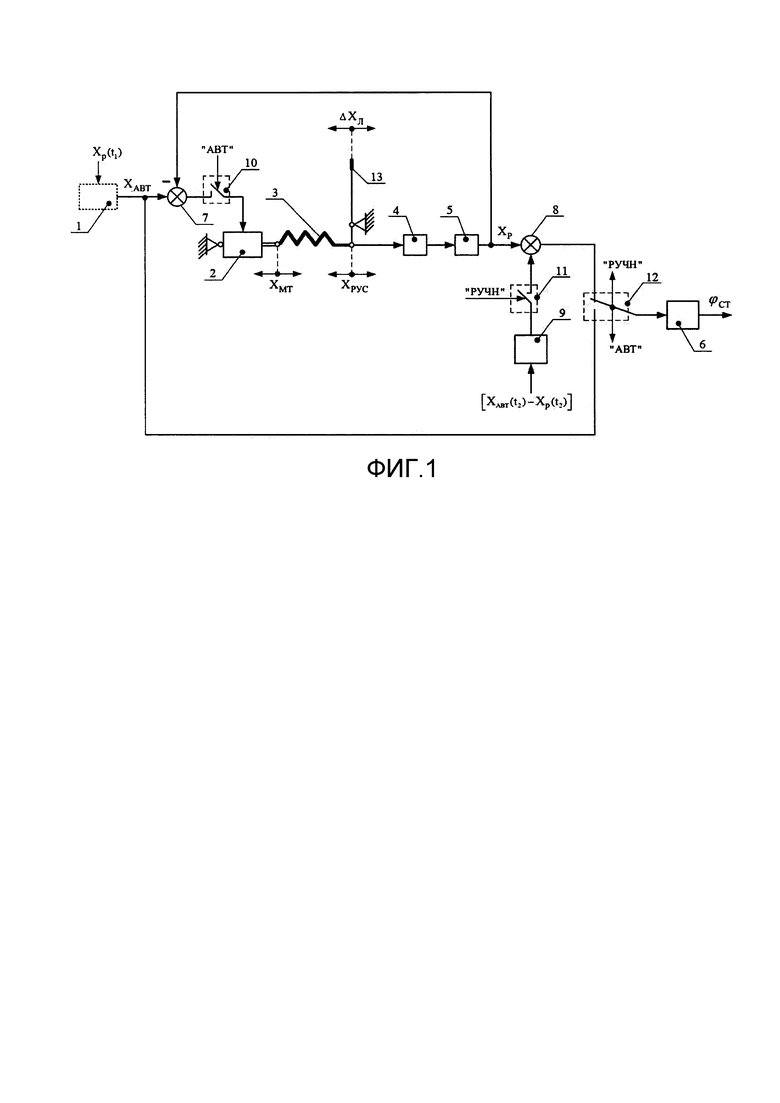
Сущность изобретения поясняется рисунком, на котором представлен пример реализации заявляемого способа согласования режимов ручного и автоматического управления самолетом в продольном движении.
На фиг. 1 использованы следующие обозначения:
1 - система автоматического управления, формирующая сигнал автоматического управления;
2 - механизм триммерного эффекта (МТЭ);
3 - загрузочный механизм (загрузочная пружина);
4 - блок преобразования сигнала по величине;
5 - предварительный фильтр;
6 - рулевой привод;
7, 8 - сумматоры;
9 - блок списывания сигналов до нулевого уровня;
10, 11, 12 - управляемые ключи;
13 - ручка управления самолетом (РУС);
ХАВТ - сигнал автоматического управления;
ХР - сигнал ручного управления;
ХМТ - перемещение штока МТЭ;
ΔХЛ - перемещение РУС, осуществляемое летчиком;
ХРУС - полное перемещение РУС от штока МТЭ и от летчика;
ϕСТ - угол отклонения стабилизатора (руля высоты) самолета;
«АВТ» - признак включения режима автоматического управления самолетом;
«РУЧН» - признак включения режима ручного управления самолетом;
ХР (t1) - значение сигнала ХР в момент времени t1;
t1 - момент времени, когда происходит переход из ручного управления самолетом в автоматический режим управления.
ХР (t2), ХАВТ (t2) - значения сигналов ХР, ХАВТ в момент времени t2;
t2 - момент времени, когда происходит переход из автоматического режима управления самолета в ручной режим управления;
Сигнал ХР ручного управления самолетом формируется из сигнала ХРУС путем предварительного его преобразования по величине (усиления или ослабления) в блоке 4 и фильтрации в блоке 5. Сигнал ХАВТ является выходным сигналом системы САУ.
В режиме ручного управления самолетом, перед переходом в режим автоматического управления:
- контакты ключа 10 разомкнуты, сигнал на входе МТЭ равен нулю, следящий контур МТЭ разомкнут;
- контакты ключа 11 замкнуты, но сигнал на выходе блока 9 списан до нулевого уровня;
- сигнал ХРУС=ХМТ+ΔХЛ является результатом перемещения РУС летчиком;
- на вход привода 6 через замкнутые (в верхнем положении) контакты ключа 12 поступает сигнал с выхода сумматора 8, равный сигналу ХР ручного управления самолетом;
- таким образом, перед выходом из режима ручного управления сигнал на входе привода равен ХР (t1).
В момент времени t1 при переходе из ручного в автоматический режим управления на вход привода 6 через замкнутые (в нижнем положении) контакты ключа 12 поступает сигнал с выхода САУ, имеющий в качестве начальных условий значение ХР (t1).
Таким образом, в момент перехода из ручного управления самолетом в режим автоматического управления сигнал на входе в привод остается прежним - ХР (t1), неизменным по величине, за счет чего исключаются скачкообразные изменения руля высоты и «ударные» изменения перегрузки. В режиме автоматического управления замыкаются контакты ключа 10 и МТЭ переводится в следящий режим за счет охвата отрицательной обратной связью по сигналу ручного управления ХР. При этом сигнал ХР (t) отслеживает сигнал ХАВТ (t), т.е. ХР (t) ≈ ХАВТ (t).
В момент времени t2 при переходе из режима автоматического управления в ручное управление самолетом через замыкаемые контакты ключа 12 (верхнее положение) на вход МТЭ с выхода сумматора 8 поступает сумма двух сигналов: сигнала XР(t2) и сигнала с блока 9, представляющего собой разность сигналов ХАВТ (t2) - XР(t2), постепенно списываемого затем за определенное время (≈ 3 секунды) до нуля. За счет этого сигнал на входе в привод 6 в состоянии ручного управления вначале будет равен сигналу ХАВТ (t2) - своему предшествующему значению в режиме автоматического управления, а через 3 секунды примет текущее значение сигнала ручного управления ХР (t). Таким образом, цель изобретения - исключение скачкообразного изменения сигнала на входе привода и «ударного» изменения перегрузки достигается и при этой смене режимов управления самолетом. В режиме ручного управления самолетом контакты ключа 10 размыкаются, сигнал на входе МТЭ обнуляется и он выходит из следящего режима работы. У летчика остается возможность ручного управления МТЭ для корректировки балансировочных положений РУС.
Вторая цель изобретения - улучшение динамических характеристик системы автоматического управления достигается за счет того, что по сравнению с аналога-ми из контура управления САУ исключаются два устройства: рулевая машина с ограниченным ходом штока и МТЭ с ограниченной скоростью перемещения штока, статические и динамические характеристики которых существенным образом сказываются на динамике процессов управления самолетом.
Работоспособность и эффективность заявляемого способа согласования режимов ручного и автоматического управления самолетом в продольном движении подтверждена летными испытаниями и внедрением на самолеты МиГ-29К и его модификаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ТРИММЕРНОГО ЭФФЕКТА МАНЕВРЕННОГО САМОЛЕТА | 2018 |
|
RU2719610C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
Изобретение относится к способу согласования режимов ручного и автоматического управления самолетом в продольном движении. Для реализации способа формируют сигналы ручного или автоматического управления, которые выборочно подаются на вход привода, обеспечивающего отклонения руля высоты самолета, при этом смена управления с одного режима на другой и обратно происходит определенным образом. Обеспечивается плавный переход с одного режима на другой и обратно и улучшение динамических характеристик системы автоматического управления. 3 з.п. ф-лы, 1 ил.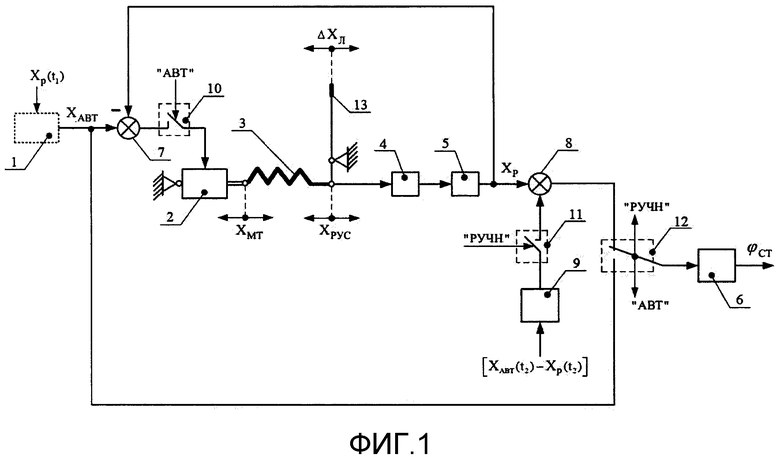
1. Способ согласования режимов ручного и автоматического управления самолетом в продольном движении, предусматривающий использование механизма триммерного эффекта (МТЭ), ручки управления самолетом (РУС), связанных друг с другом через загрузочный механизм, привод, обеспечивающий отклонение руля высоты самолета в полном рабочем диапазоне, отличающийся тем, что на вход привода выборочно поступают предварительно сформированные либо сигнал ручного управления, либо сигнал автоматического управления от системы автоматического управления (САУ), при этом в автоматическом режиме управления на входе привода формируется сигнал автоматического управления с выхода САУ с предварительно внесенным в него начальным значением, равным значению сигнала ручного управления, зафиксированного на момент смены режима управления, МТЭ переводится в режим слежения сигнала ручного управления за сигналом автоматического управления за счет подключения на его вход разности этих сигналов, а в режиме ручного управления самолетом на входе привода формируется сумма сигнала ручного управления и сигнала, сформированного в виде разности сигналов автоматического и ручного управления, зафиксированных в момент смены режима управления, с последующим списыванием этой разности сигналов до нуля, при этом сигнал на входе МТЭ обнуляется и летчику оставляется возможность управления им вручную для корректировки балансировочного положения РУС.
2. Способ согласования режимов ручного и автоматического управления самолетом в продольном движении по п. 1, отличающийся тем, что сигнал ручного управления представляет собой либо сигнал от РУС, либо сигнал от РУС, предварительно преобразованный по величине и пропущенный через фильтр.
3. Способ согласования режимов ручного и автоматического управления самолетом в продольном движении по п. 1, отличающийся тем, что для работы МТЭ в следящем режиме предусматривается блок управления, на входе которого формируется сигнал разности сигналов автоматического и ручного управления, а на выходе - сигнал, управляющий электродвигателем МТЭ.
4. Способ согласования режимов ручного и автоматического управления самолетом в продольном движении по п. 1, отличающийся тем, что при обратном переходе из режима автоматического управления в режим ручного управления самолетом списывание до нуля разности сигналов автоматического и ручного управления осуществляется по линейному, экспоненциальному или по другому закону, обеспечивающему непрерывное уменьшение разностного сигнала до нуля.
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| DE 102015118030 B4, 16.11.2017 | |||
| US 0008376283 B2, 19.02.2013 | |||
| US 0006292720 B1, 18.09.2001. | |||

