Изобретение относится к области систем управления самолетом и предназначено для обеспечения работы механизма триммерного эффекта (МТЭ) при взаимодействии ручного и автоматического управления.
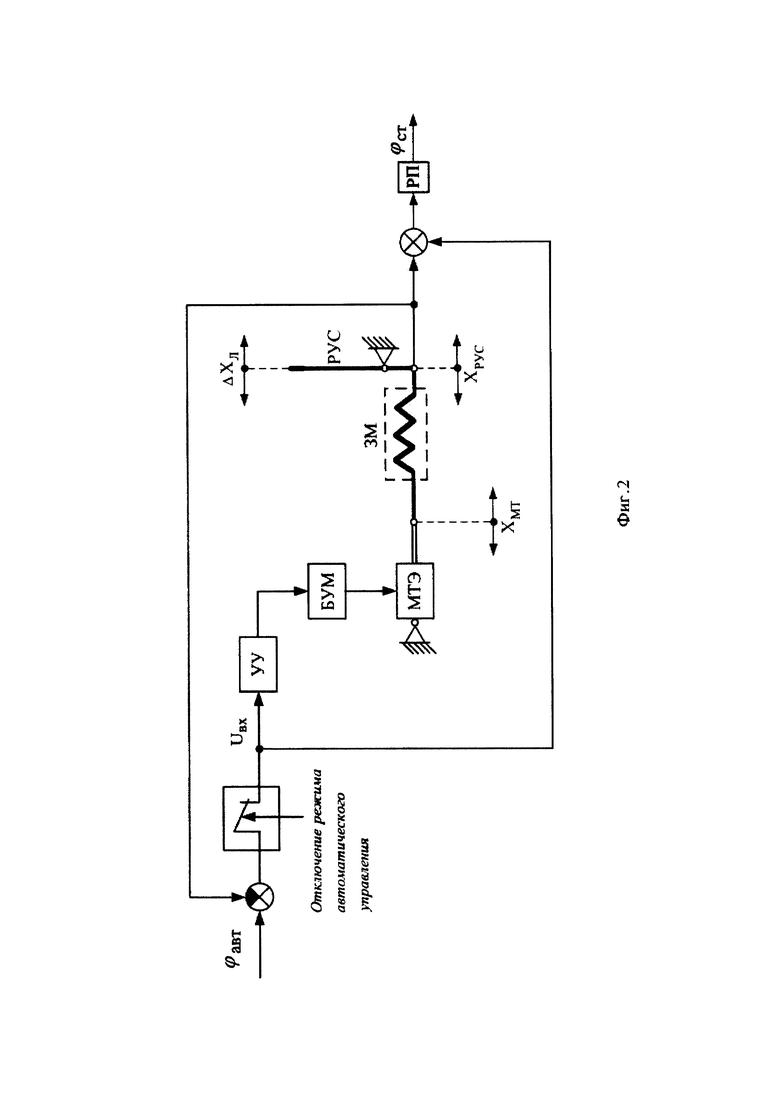
Известно, что «при работе автоматического управления необходимо согласование ручки управления с сигналом системы дистанционного управления, идущим на рулевой привод совместно с сигналом автоматического управления, т.к. в противном случае при отключении автоматики получится заброс по перегрузке» (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с.. с. 327). В этой же работе с учетом этого обстоятельства подробно рассмотрены особенности взаимодействия ручного и автоматического управления самолетом при их чередовании (с. 325÷333, рис. 6.10, 6.11, 6.12, 6.13). Во всех указанных вариантах перехода управления самолетом из режима ручного управления в автоматический режим МТЭ оказывается включенным в следящий контур регулирования так, как это показано на фиг. 2.
Работа МТЭ в следящем режиме сопряжена с рядом особенностей:
- основным узлом МТЭ является электродвигатель постоянного тока, перемещающий через редуктор и выходной шток пружину загрузочного механизма (ЗМ) и ручку управления самолетом (РУС);
- управление электродвигателем осуществляется реверсивно с постоянной (фиксированной) скоростью перемещения штока МТЭ с помощью блока усилителя мощности (БУМ);
- в редукторе МТЭ, в узлах крепления МТЭ с корпусом самолета, в местах стыковки МТЭ с ЗМ и соединения ЗМ с РУС имеются люфты, увеличивающиеся по мере эксплуатации;
- электродвигатель МТЭ должен включаться в работу как можно реже исходя из необходимости экономии рабочего ресурса;
- электродвигатель обладает определенными динамическими характеристиками, влияющими на устойчивость и динамику следящего контура управления МТЭ в целом.
С учетом этих особенностей устройство управления (УУ) механизмом триммерного эффекта должно обеспечивать как устойчивость, так и приемлемые статические и динамические характеристики следящего контура в условиях действия люфтов, наличия релейной скоростной характеристики электродвигателя и его динамических свойств.
Известные и распространенные на практике устройства управления электродвигателями постоянного тока используют схемы импульсного регулирования (Крымов Б.Г., Рабинович Л.В., Стеблецов В.Г. Исполнительные устройства систем управления летательными аппаратами, М.: Машиностроение, 1987, 264 с., с. 166÷171, рис. 4.4, рис. 4.5, рис. 4.7). Их реализация достаточно сложна, а принципиально свойственный им непрерывный импульсный режим включения/выключения электродвигателя снижает ресурс его работы.
Пониженной частотой включения/выключения отличается устройство управления исполнительным блоком интегрального типа (аналог МТЭ), представленная в патенте RU 2380279. Данное устройство управления МТЭ используется на самолетах «МиГ», но схема его излишне усложнена и обладает, как будет показано ниже, невысокой точностью слежения за входным сигналом автоматического управления.
Целью изобретения является упрощение структуры УУ при одновременном обеспечении приемлемой точности отслеживания входного сигнала в следящем контуре и экономии располагаемого ресурса работы МТЭ за счет снижения частоты коммутации напряжения на электродвигатель.
Техническим результатом заявляемого устройства управления механизмом триммерного эффекта маневренного самолета является его упрощение, повышение надежности за счет увеличения срока службы вследствие сокращения частоты коммутации исполнительного электродвигателя, обеспечение устойчивой работы при работе в следящем контуре при одновременном обеспечении приемлемых точностных характеристик.
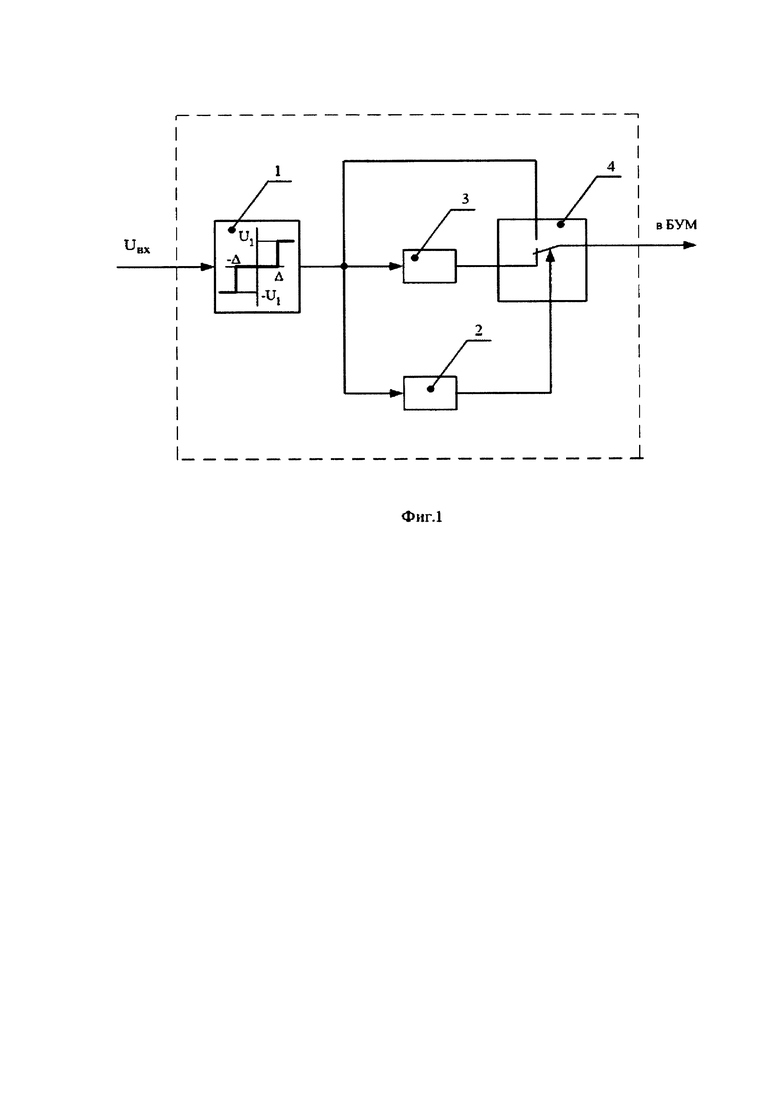
Технический эффект достигается тем, что заявляемое устройство управления механизмом триммерного эффекта содержит нелинейный блок с зоной нечувствительности и ограничением сигнала по величине, вход которого является входом устройства, блок временного запаздывания, блок логики и двухпозиционный ключ, выход которого является выходом устройства, при этом выход нелинейного блока соединен со входами блока временного запаздывания, блока логики и с нормально-разомкнутым контактом ключа, нормально-замкнутый контакт ключа подключен к выходу блока временного запаздывания, а управляющий вход ключа соединен с выходом блока логики. Блок логики при нахождении сигнала на выходе нелинейного блока в зоне нечувствительности коммутирует выход ключа с нормально-разомкнутым контактом, а при выходе сигнала на выходе нелинейного блока из зоны нечувствительности - с нормально-замкнутым контактом.
Сущность изобретения поясняется графическими изображениями:
на фиг. 1 представлена блок-схема заявляемого устройства;
на фиг. 2 изображена блок-схема образования следящего контура управления МТЭ;
на фиг. 3 показана блок-схема включения заявляемого устройства в следящий контур управления МТЭ;
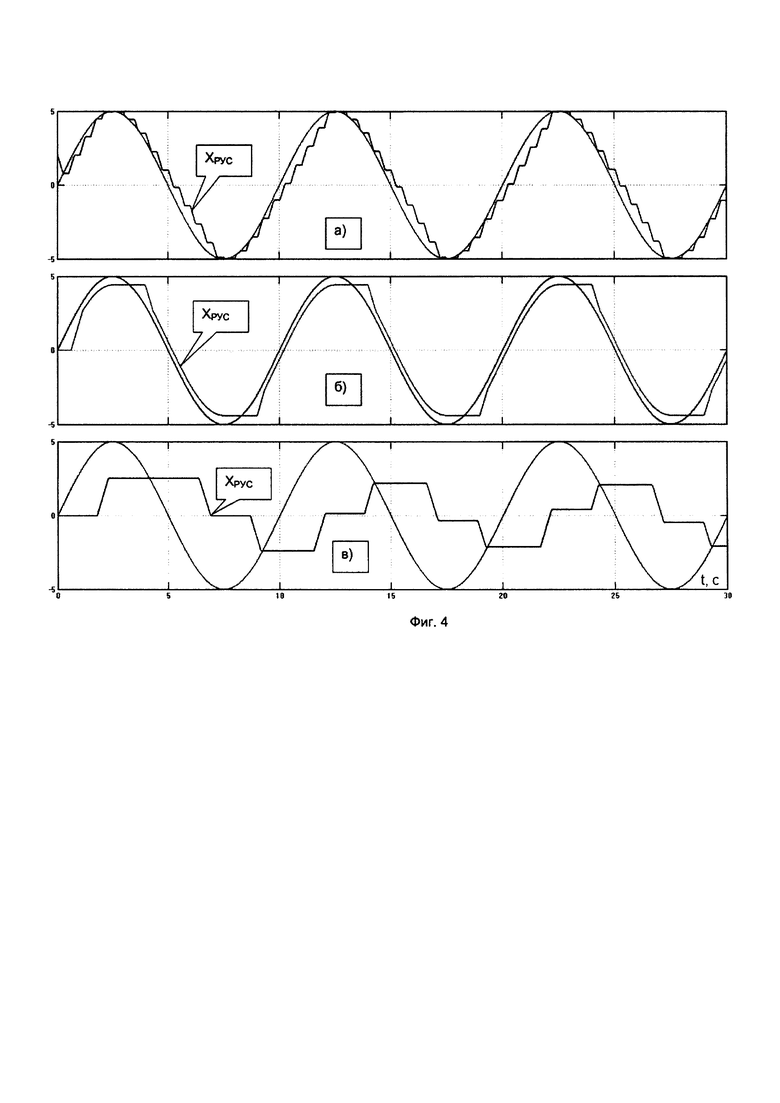
на фиг. 4 представлены графики процессов отработки синусоидального входного сигнала с устройством, использующим принцип импульсного регулирования (график а)), с заявляемым устройством (график б)) и с устройством, представленным в патенте RU 2380279 (график в)).
На фиг. 1÷4 использованы следующие обозначения:
1 - нелинейный блок с зоной нечувствительности и ограничением сигнала по величине;
2 - блок логики;
3 - блок временного запаздывания;
4 - двухпозиционный ключ,
Δ - величина зоны нечувствительности нелинейного блока 1;
U1 - уровень ограничения сигнала на выходе нелинейного блока 1;
УУ - устройство управления МТЭ;
БУМ - блок усиления мощности;
МТЭ - механизм триммерного эффекта с электродвигателем постоянного тока, редуктором и линейно перемещающимся выходным штоком;
ϕавт - сигнал автоматики, подлежащий отслеживанию перемещения РУС с помощью МТЭ;
РУС - ручка управления самолетом;
ХРУС - перемещение ручки управления самолетом;
Uвх=(ϕавт-ХРУС) - сигнал на входе в УУ механизмом триммерного эффекта;
ЗМ - загрузочный механизм ручки управления самолетом;
ХМТ - перемещение штока МТЭ;
ΔХЛ - перемещение ручки управления самолетом летчиком;
РП - рулевой привод;
ϕст - отклонение стабилизатора (руля высоты).
Работу заявляемого устройства управления механизмом триммерного эффекта маневренного самолета рассмотрим при «наиболее характерном для электропривода синусоидальном входном воздействии» (Крымов Б.Г., Рабинович Л.В., Стеблецов В.Г. Исполнительные устройства систем управления летательными аппаратами, М.: Машиностроение, 1987, 264 с, с. 166). При наличии управляющего сигнала на входе нелинейного блока 1, когда |Uвх|>Δ блок логики 2 формирует на своем выходе сигнал, переводящий ключ 4 в нижнее замкнутое положение. Благодаря этому на выход УУ поступает сигнал с выхода блока временного запаздывания 3, представляющий собой сигнал U1 с выхода нелинейного блока с определенной задержкой по времени. Сигнал U1 поступает далее в БУМ, с его помощью далее включается в работу электродвигатель и выходной шток МТЭ перемещается с постоянной скоростью. Направление перемещения штока МТЭ зависит от знака сигнала U1, т.е. от знака сигнала Uвх. В том случае, когда |Uвх|≤Δ блок логики 2 формирует на своем выходе сигнал, переводящий контакты ключа 4 в верхнее замкнутое положение. Сигнал на выходе УУ становится в этом случае равным нулю и перемещение штока МТЭ прекращается. Таким образом, шток МТЭ перемещается в случае превышения величины сигнала на входе УУ назначенной зоны нечувствительности Δ и останавливается в противном случае. Величина зоны нечувствительности Δ в нелинейном блоке 1 и время задержки прохождения сигнала в блоке 3 определяются из условия обеспечения устойчивости следящего контура управления МТЭ в целом с учетом наличия люфтов в механических узлах крепления МТЭ с загрузочным механизмом и ручкой управления самолетом, релейного управления скоростью вращения вала электродвигателя и особенностей динамических свойств конкретного типа электродвигателя.
На фиг. 4 представлен анализ процессов в следящем контуре управления МТЭ с различными вариантами реализации УУ при синусоидальном входном сигнале вида ϕавт=5 Sin (0,628t):
- на фиг. 4а) - с УУ, использующим принцип импульсного регулирования;
- фиг. 4б) - с использованием заявляемого к патентованию УУ;
- фиг. 4в) - с УУ, выполненным в соответствии с патентом RU 2380279.
Анализ процессов, представленных на фиг. 4а) свидетельствует, что сигнал ХРУС отслеживает входной сигнал ϕавт с приемлемой точностью, но с достаточно высокой частотой включений/выключений в работу электродвигателя МТЭ, что снижает срок его эксплуатации при назначенном производителем ресурсе.
Процессы в следящем контуре управления МТЭ с УУ, выполненным в соответствии с патентом RU 2380279 (фиг. 4в), наоборот, отличаются низкой частотой включений/выключений в работу электродвигателя, но ХРУС отслеживает входной сигнал ϕавт с недостаточной точностью.
Характер процессов в следящем контуре управления МТЭ с использованием заявляемого к патентованию УУ свидетельствует, что ХРУС отслеживает входной сигнал ϕавт с приемлемой точностью и с низкой частотой включений/выключений в работу электродвигателя МТЭ, т.е. УУ удовлетворяет предъявляемым требованиям к работе МТЭ в следящем контуре управления..
Следящий контур управления МТЭ с использованием заявляемого к патентованию УУ прошел проверку в летных испытаниях с положительной оценкой и принят к использованию на самолетах МиГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОГЛАСОВАНИЯ РЕЖИМОВ РУЧНОГО И АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ ДВИЖЕНИИ | 2018 |
|
RU2726372C2 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |

Изобретение относится к области систем управления самолетом и предназначено для обеспечения работы механизма триммерного эффекта (МТЭ) при взаимодействии ручного и автоматического управления. Изобретение позволяет повысить надежность механизма триммерного эффекта маневренного самолета за счет увеличения срока службы вследствие сокращения частоты коммутации исполнительного электродвигателя, обеспечить устойчивую работу при работе в следящем контуре при одновременном обеспечении приемлемых точностных характеристик. 1 з.п. ф-лы, 4 ил.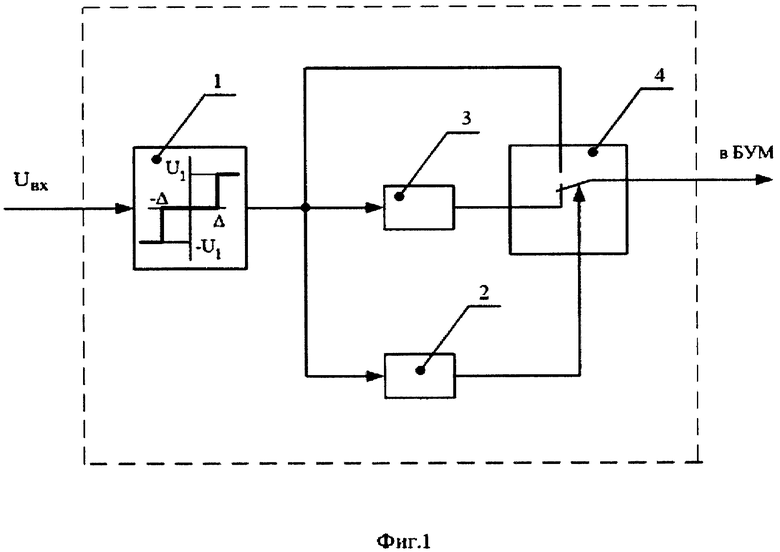
1. Устройство управления механизмом триммерного эффекта маневренного самолета, содержащее нелинейный блок с зоной нечувствительности и ограничением сигнала по величине, вход которого является входом устройства, блок временного запаздывания, блок логики и двухпозиционный ключ, выход которого является выходом устройства, при этом выход нелинейного блока соединен со входами блока временного запаздывания, блока логики и с нормально-разомкнутым контактом ключа, нормально-замкнутый контакт ключа подключен к выходу блока временного запаздывания, а управляющий вход ключа соединен с выходом блока логики.
2. Устройство управления механизмом триммерного эффекта маневренного самолета по п. 1, отличающееся тем, что блок логики при нахождении сигнала на выходе нелинейного блока в зоне нечувствительности коммутирует выход ключа с нормально-разомкнутым контактом, а при выходе сигнала на выходе нелинейного блока из зоны нечувствительности - с нормально-замкнутым контактом.
| Нелинейное корректирующее устройство | 1976 |
|
SU651305A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| WO 2003040844 A2, 15.05.2003 | |||
| WO 2010011388 A2, 28.01.2010 | |||
| US 5979835 A1, 09.11.1999 | |||
| WO 2016178738 A1, 10.11.2016. | |||

