Изобретение относится к приборам безопасности подъемно-транспортного оборудования и предназначено для защиты кранов от перегрузки.
В книге авторов: Сушинский В.А., Маш Д.М., Шишков Н.А. «Приборы безопасности грузоподъемных кранов». Часть – I. 2-е издание, - СПб.: НТЦ Строймашавтоматизация, 2001, описаны конструкции ограничителей грузоподъемности для кранов с гибкой подвеской стрелы ОГБ-2, ОНК-М, ОГП-1, в которых в качестве датчиков усилий и угла наклона стрелы используются трансформаторные или потенциометрические преобразователи.
Однако такие устройства имеют низкую надежность и точность, обусловленные наличием в датчиках усилий движущихся элементов, а так же чувствительностью потенциометрических и трансформаторных преобразователей перемещений к влиянию вибрации и изменению температуры.
Также из книги Жадобина Н. Е. , Крылова А. П. , Малышева В. А. «Элементы и функциональные устройства судовой автоматики». Учебник, 2-е изд., перераб. и доп. СПб. : Элмор, 1998. 440 с. стр. 256 известна «автоматическая система ограничения грузоподъемности судовых кранов», состоящая из магнитоанизотропного преобразователя, фильтра нижних частот, двухполупериодного выпрямителя, двух фильтров нижних частот с частотами среза 0,1 Гц и 10 Гц, шести компараторов, шести реле и защитного устройства, состоящего из компаратора и бесконтактного ключа.
Недостатком данной системы является наличие в канале выделения напряжения, пропорционального среднему значению усилия в магнитопроводе магнитоанизотропного преобразователя фильтра нижних частот с низкой частотой среза, что приводит к значительному увеличению времени измерения. Помимо этого данное устройство имеет низкую точность срабатывания, обусловленную тем, что в нем производится кусочно-линейная аппроксимация грузовой характеристики крана посредством компараторов К1 – К6.
Целью изобретения является повышение надежности и точности срабатывания ограничителей грузоподъемности.
Для достижения этой цели предлагается в качестве датчика усилия использовать магнитоанизотропный преобразователь механических усилий со сплошным магнитопроводом, выполненным из материала с известными магнитоупругими свойствами. В качестве датчика угла наклона стрелы предлагается использовать абсолютный оптический энкодер, в котором каждому положению вала соответствует уникальный цифровой код. Помимо этого для перемножения сигналов датчиков усилия и наклона стрелы и задания грузовой характеристики крана предлагается использовать микропроцессорный контроллер.
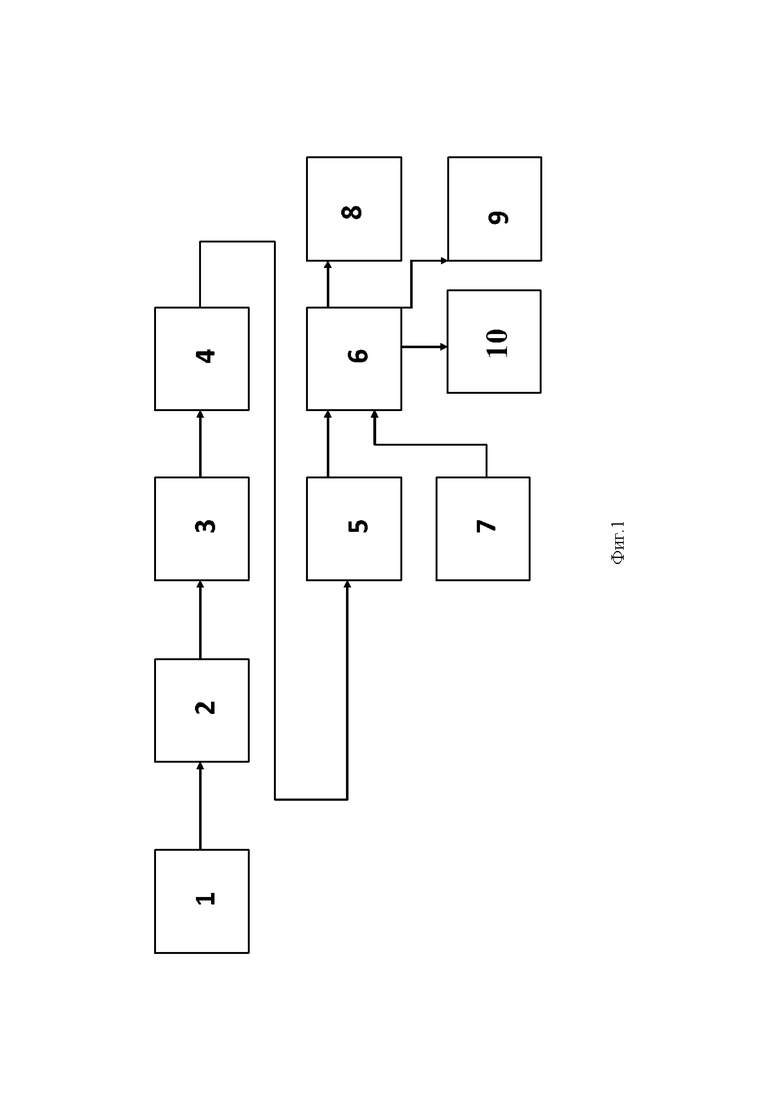
На Фиг. 1. представлена функциональная схема устройства.
Ограничитель грузоподъемности крана содержит магнитоанизотропный преобразователь 1, обмотка возбуждения которого получает питание от источника переменного тока, а измерительная обмотка подключена через усилитель 2 к блоку фильтров 3. Выход блока фильтров 3 подаётся через выпрямитель 4 на вход фильтра с конечной импульсной характеристикой 5. С выхода фильтра с конечной импульсной характеристикой 5 сигнал поступает в аналого-цифровой преобразователь 6 и далее в микропроцессорный контроллер 7, на другой вход которого поступает цифровой сигнал с датчика наклона стрелы 8. Выходы микропроцессорного контроллера 7 подключены к реле 9 и 10. Реле 9 обеспечивает блокировку работы подъемного механизма, а реле 10 обеспечивает срабатывание световой и звуковой сигнализации.
Работа устройства.
Магнитоанизотропный преобразователь 1 устанавливается между неподвижными оттяжками стрелы аналогично датчикам усилия ограничителей грузоподъемности ОГБ-2, ОНК-М, ОГП-1. Датчик угла наклона стрелы 7 установлен соосно с шарниром стрелы крана. При работе крана в магнитопроводе магнитоанизотропного преобразователя 1 будут возникать механические напряжения растяжения, которые в свою очередь приведут к появлению магнитной анизотропии и появлению напряжения в измерительной обмотке преобразователя, причем это напряжение будет пропорционально механическим усилиям, прикладываемым к магнитопроводу и соответственно массе поднимаемого груза. Напряжение с измерительной обмотки магнитоанизотропного преобразователя 1 поступает на усилитель 2 и далее на блок фильтров 3, в котором выделяется первая гармоническая составляющая. С выхода блока фильтров 3 напряжение через выпрямитель 4 подается на фильтр с конечной импульсной характеристикой 5, который производит быстрое осреднение сигнала. С выхода фильтра 5 напряжение поступает в аналого-цифровой преобразователь 6, полученный цифровой код поступает на один из входов микропроцессорного контроллера 7. На другой вход микропроцессорного контроллера 7 поступает цифровой сигнал с датчика наклона стрелы 8. В микропроцессорном контроллере заложена грузовая характеристика крана и функция перемножения сигналов магнитоанизотропного преобразователя 1 и оптического абсолютного энкодера 8. Выходы микропроцессорного контроллера 7 меняют свое состояние, в случае если полученное произведение сигналов превышает значение, определяемое грузовой характеристикой.
Заявляемое изобретение была разработано специалистами кафедры электродвижения и автоматики судов ФГБОУ ВО «Государственный университет морского и речного флота имени С.О. Макарова» при выполнении научно-исследовательской работы «Разработка требований PC к ограничителям грузоподъемности судовых кранов». Устройство было изготовлено и проверено в лабораторных условиях. Проведенные испытания дали положительный результат, подтвердивший возможность использования устройства для обеспечения безопасности судовых кранов. Изложенное позволяет сделать вывод о соответствии заявляемой полезной модели критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1999 |
|
RU2179146C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМИ МЕХАНИЗМАМИ С ФИКСАЦИЕЙ ИХ ХАРАКТЕРИСТИК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116240C1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2003 |
|
RU2262481C2 |
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2009 |
|
RU2405736C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМИ МЕХАНИЗМАМИ | 2003 |
|
RU2260560C2 |
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
Предложен ограничитель грузоподъемности кранов с гибкой подвеской стрелы. Ограничитель содержит магнитоанизотропный датчик усилия, обмотка возбуждения которого получает питание от источника переменного напряжения, а измерительная обмотка через усилитель и блок фильтров подключена к аналого-цифровому преобразователю. Также ограничитель содержит фильтр с конечной импульсной характеристикой и микропроцессорный контроллер. В качестве датчика угла наклона стрелы используют абсолютный оптический энкодер. Вход фильтра с конечной импульсной характеристикой подключен к выходу выпрямителя, а выход - к аналого-цифровому преобразователю. В микропроцессорном контроллере заложена грузовая функция крана и функция перемножения сигналов с датчиков усилия и угла наклона стрелы. На один вход микропроцессорного контроллера поступает цифровой сигнал с аналого-цифрового преобразователя, а на другой вход поступает цифровой сигнал с абсолютного энкодера. Выходы микропроцессорного контроллера меняют свое состояние в случае, если полученное произведение сигналов превышает значение, определяемое грузовой характеристикой. Достигается повышение надежности и точности срабатывания ограничителей грузоподъемности. 1 ил.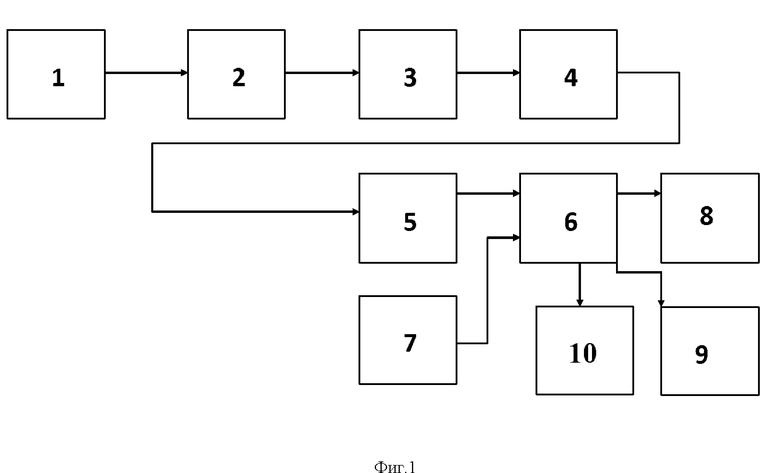
Ограничитель грузоподъемности кранов с гибкой подвеской стрелы, содержащий магнитоанизотропный датчик усилия, обмотка возбуждения которого получает питание от источника переменного напряжения, а измерительная обмотка через усилитель и блок фильтров подключена к аналого-цифровому преобразователю, отличающийся тем, что в него введен фильтр с конечной импульсной характеристикой и микропроцессорный контроллер, а в качестве датчика угла наклона стрелы используется абсолютный оптический энкодер, при этом вход фильтра с конечной импульсной характеристикой подключен к выходу выпрямителя, а выход - к аналого-цифровому преобразователю, в микропроцессорном контроллере заложена грузовая функция крана и функция перемножения сигналов с датчиков усилия и угла наклона стрелы, на один вход микропроцессорного контроллера поступает цифровой сигнал с аналого-цифрового преобразователя, а на другой - цифровой сигнал с абсолютного энкодера, выходы микропроцессорного контроллера меняют свое состояние в случае, если полученное произведение сигналов превышает значение, определяемое грузовой характеристикой.
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1999 |
|
RU2179146C2 |
| Способ укрепления связных грунтов | 1961 |
|
SU144118A1 |
| RU 99118271 A, 20.07.2001. | |||

