Система относится к вычислительной технике и может быть использована на большегрузных железнодорожных кранах для обеспечения безопасности работы, снижения вероятности аварий, поломок и опрокидывания при погрузочно-разгрузочных работах.
Известен ряд устройств, призванных обеспечивать безопасность работы с подъемным краном, например ограничитель грузового момента PAT DS 350 [1], позволяющий получить информацию от датчиков, обработать ее и в виде, удобном для восприятия, представить ее оператору (крановщику). По результатам представленной системой информации крановщик принимает решение о проведении работ, что облегчает крановщику управление краном.
Основным недостатком ограничителя грузового момента PAT DS 350 является автоматического отключения выполнения эволюций, которые вызвали опасную ситуацию. Этот недостаток обусловлен и идеологией устройства ограничителя и выбором исполнительных механизмов и элементов крана.
Прототипом изобретения является Система автоматического ограничителя грузоподъемности АС-АОГ-01 [2], в котором устранен недостаток PAT DS 350, т. к. предусмотрено автоматическое отключение исполнительных механизмов при опасных эволюциях крана.
АС-АОГ-01 содержит в своем составе:
- датчик угла наклона стрелы,
- датчик массы груза,
- датчик длины стрелы,
- блок питания,
- контроллер микропроцессорный,
- модуль индикации,
- модуль ввода-вывода информации.
- модуль ПЗУ,
- модуль АПЦ, преобразующий информацию от датчиков в коды контроллера,
- задатчик ограничений.
- датчик звуковой информации.
Контроллер по информации от датчиков рассчитывает грузовой момент, представляет информацию крановщику, сравнивает с заранее рассчитанными и внесенными в ПЗУ данными. При ситуациях с аварийными последствиями, т.е. при превышении фактическими данными данных ПЗУ, система предупреждает крановщика звуковой сигнализацией, световой и цифровой индикацией и вырабатывает сигналы, отключающие выполнение опасных эволюций.
Автоматическое отключение выполнения опасных эволюций, которые могут вызывать аварийную ситуацию, является принципиальным преимуществом такого ограничителя грузоподъемности.
Но использование указанной системы АС-АОГ-01 для класса большегрузных кранов на рельсовом ходу неэффиктивно и в ряде случае опасно. Это связано со спецификой диаграммы грузового момента этого класса кранов в зависимости от угла поворота поворотной площадки, а также с отсутствием автоматического контроля за креном крана с невозможностью прогнозирования критического крана. Кроме того, системой АС-АОГ-01 не обеспечивается контроль за параметрами гидросистемы, что при эксплуатации большегрузных кранов, например, в условиях низких температур также может привести к аварийным ситуациям.
К недостаткам прототипа можно отнести неудобство при работе крановщика со средствами индикации состояния крана и входящих в его состав агрегатов, т. к. выбор информации осуществляется кнопочным переключателем и крановщик в этом случае отрывает руки от рычагов управления, что в критической ситуации может оказаться опасным.
В системе АС-АОГ-01 отсутствует возможность снятия и восстановления ограничений по опасным эволюциям. Но в ряде случаев это необходимо, например, при регламентных работах или в чрезвычайной ситуации, связанной со спасением людей.
Технической задачей изобретения является повышение надежности, безопасности и оперативности системы управления большегрузным железнодорожными кранами, расширение функциональных возможностей, удобства при регламентных работах и в чрезвычайных ситуациях.
Техническая задача решается за счет того, что в систему, содержащую датчики угла подъема стрелы, длины стрелы и массы груза, цифровую вычислительную машину, задатчик ограничений, устройство ввода-вывода информации, аналого-цифровой преобразователь, датчик звуковой информации, блок управляющих реле, дешифратор, связанный с устройством индикации, устройство обработки информации, датчики битовой информации дополнительно введены: второе устройство обработки информации, датчик угла поворота поворотной площадки крана, датчик угла крена, табло запретов, устройство блокировки сигналов запретов, причем первое устройство обработки информации выполнено с дополнительным входом, к которому подключены датчики температуры, ко второму устройству обработки информации подключены датчики угла подъема стрелы, длины стрелы, и угла поворотной площадки крана, а датчик угла крена подключен к аналого-цифровому преобразователю.
На фиг. 1 представлена схема управления большегрузным краном СУБК, состоящая из блока датчиков оперативной информации подъемного крана БД1, соединенного с вычислительной частью ВЧ 2 системы управления. Блок датчиков БД1 оперативной информации содержит в своем составе нижеследующие датчики:
3 - датчик битовой информации ДБИ (положения выносных опор, крюка и т.п. ), реализован, например, на концевых переключателях,
4 - датчик температуры ДТ (измеряет значение температуры масла в гидросистеме крана),
5 - датчик угла поворота поворотной площадки крана ДУП,
6 - датчик угла подъема стрелы ДПС,
7 - датчик длины стрелы ДДС,
8 - датчик массы ДМ груза на крюке,
9 - датчик угла крена ДУК.
В состав вычислительной части системы управления ВЧ2 входят:
10, 11 - первое и второй устройства обработки информации УОИ соответственно,
12 - аналого-цифровой преобразователь АЦП,
13 - устройство ввода-вывода информации УВВ,
15 - дешифраторы ДШ цифровой и буквенной информации,
16 - устройство блокировки сигналов запроса УВСЗ,
17 - задатчик ограничений ЗО,
18 - устройства индикации УИ, цифровое и аналоговое,
19 - датчик звуковой информации ДЗИ,
20 - табло запретов ТЗ,
21 - блок управляющих реле БУР,
Функционально СУБК решает задачу измерения составляющих угла крена и преобразования в коды ЦВМ необходимого набора параметров крана, а также вычисления критических параметров (грузового момента, крена и т.д.) по заданному алгоритму и сравнения их с предельными, теоретически заранее рассчитанными и занесенными в ПЗУ данными. В результате при достижении опасных значений СУБК вырабатывает сигналы, запрещающие выполнение тех или иных эволюций крана. Оператору постоянно представляется вся необходимая текущая информация о режимах работы крана.
Работа предлагаемой СУБК осуществляется следующим образом. Оператором (крановщиком) подается сигнал ВКЛ (например, тумблером) на ЦВМ 14, которая осуществляет тест - контроль всех устройств ВЧ2. при положительном результате контроля ВЧ2 принимает информацию от БД1.
Аналоговая информация о массе груза на крюке от ДМ 8, о величине угла крена от ДУК 9 поступает на АЦП 12, где преобразуется в цифровой код, воспринимаемый УВВ 13. Затем в УВВ 13 полученной информации присваиваются коды адресного поля ЦВМ и информация поступает в ЦВМ 14.
Информация о положении выносных опор, положении крюка, состоянии троса, пороговых значениях температуры масла в гидросистеме и другая битовая информация от ДБИ 3, ДТ 4 поступает в УОИ 10, где нормируется, преобразуется в параллельный код. Затем в УВВ 13 этой информации присваиваются коды адресов ЦВМ и она поступает в ЦВМ 14.
Большегрузные железнодорожные краны имеют несколько положений выносных опор (например, кран СМ-515 имеет три: транспортное, промежуточное и рабочее положение). Устойчивость крана к опрокидыванию для каждого из них различная. Исходя из этого заранее рассчитываются и заносятся в ПЗУ ЦВМ 14 несколько семейств нагрузочных характеристик (у СМ-515 их-три), каждое значение грузового момента выбирается из ПЗУ для сравнения с оперативно рассчитанными в соответствии с сигналом о положении выносных опор.
Кодовая информация об угле поворота поворотной площадки крана, угле подъема стрелы и длине стрелы от соответствующих датчиков ДУП 5, ДПС 6, ДДС 7 поступает в УОИ 11, где нормируется, преобразуется в параллельный код, направляемый в УВВ 13. В последнем информации придается кодовый формат и присваивается адрес адресного поля ЦВМ.
Вся полученная от УВВ 13 информация используется ЦВМ 14 для расчетов грузового момента, сравнения его текущего значения с критическим теоретическим значением этого параметра, представления всей необходимой оператору текущей информации (цифровой, знаковой, буквенной). Наличие всей необходимой оперативной информации о состоянии агрегатов запретительных "подсказок", значений основных параметров при работе крана предъявляется крановщику без отрыва от рычагов управления, что особенно важно при опасных эволюциях крана.
Для контроля и учета фактического крена платформы крана используется информация с ДУК 9. Величину крена по опрокидыванию необходимо определять в плоскости, перпендикулярной рельсовому пути. С целью учета угла поворота поворотной площадки крана информация о крене от ДУК принимается по двум составляющим угла во взаимно перпендикулярных плоскостях. Поступившая через АЦП 12 и УВВ 13 в ЦВМ 14 информация пересчитывается с учетом данных об угле поворота поворотной площадки крана от ДУП 5 в угол крена в плоскости, перпендикулярной рельсовому пути. При этом при достижении углом крана опасного значения (например 3,5 o) включается звуковой сигнал на ДЗИ 19, начинает мигать цифровой индикатор угла крена на УИ 18, а при достижении критического значения (например, 4 o) ВЧ 2 вырабатывает сигнал остановки эволюций, приведших к увеличению угла крена до критического значения, с разрешением эволюций, уменьшающих величину крена, и через БУР 21 управляет агрегатами крана.
Наличие в составе СУБК датчика угла поворота поворотной площадки крана ДУП 5 диктуется не только необходимостью указанного выше пересчета угла крана. Поскольку расстояния между выносными опорами у железнодорожных кранов (в отличие от автодорожного крана АС-АОГ-01) в продольном и поперечном измерениях различны, то диаграммы нагрузочных характеристик из круговых трансформируются в сложные эллипсовидные кривые, что отражается на устойчивости к опрокидыванию при различных углах поворота. Для расчетов фактических грузовых моментов при работе с грузом и программных нагрузочных характеристик на различных углах поворота поворотной площадки крана также необходима информация от ДУП 5.
Рассчитанные ЦВМ 14 данные для представления оператору поступают через УВВ 13 в ДШ 15, где с учетом адресной системы рассылаются в каналы цифровой или битовой информации. Коды цифровой информации из двоично-десятичной формы преобразуются в ДШ 15 с семиразрядные коды управления УИ 18 и информация отображается на цифровых индикаторах. Коды для битовой информации (т.е. для подсветки различных табло, транспарантов, как например, состояния агрегатов, запретов) дешифруются в ДШ 15 и рассылаются на соответствующие элементы УИ 18.
Сигналы на запрет проведения эволюций в сторону ухудшения ситуации поступают от УВВ 13 в БУР 21, в котором они усиливаются по мощности от уровня логических сигналов микросхем до соответствующих напряжений (+27 B) и токов (десятков Ампер для управления агрегатами крана, в том числе и гидравлическими приводами).
Сигналы на запрет проведения опасных эволюций крана поступают также на ТЗ 20, представляющее собой набор транспарантов типа: "Запрет выдвижения стрелы", "Запрет подъема груза". Здесь же индуцируются и причины остановки крана: "Крюк поднят", "Канат смотан", "Грузовой момент превышен", т.е. оператору предлагается анализ причины критической ситуации.
Информация на включение звукового сигнала из ЦВМ 14 поступает на УВВ 13, где преобразовывается в сигналы управления ДЗИ 19. Зуммер ДЗИ 19 дополнительно привлекает внимание оператора крана.
Для проведения ежегодных испытаний на перегрузку крана (в соответствии с Руководством по технической эксплуатации крана) в схему введено УБСЗ 16. Аппаратурно оно может быть реализовано, например, в виде автомобильного замка зажигания, ключ от которого находится в службе, проводящей регламентное обслуживание. Сигнал от УБСЗ 16 поступает в УВВ 13, где нормируется с присвоением соответствующего кода адресного поля ЦВМ, и затем направляется в ЦВМ 14. Получив команду на блокировку запретов, ЦВМ вырабатывает всю информацию в полном объеме на индикацию и не вырабатывает сигналов запрета. Восстановление штатной работы СУБК осуществляется снятием оператором сигнала блокировки с УБСЗ 16.
При работе крана в нештатных ситуациях (железнодорожные катастрофы, аварии нефтепроводов и др.), там, где для спасения людей необходимо превысить кратковренно предельно-допустимые нормы, также используют блок УБСЗ 16. По окончании чрезвычайных работ блок УБСЗ 16 восстанавливают ключом в рабочее состояние.
Для обеспечения работы крана в ограниченном телесном угле в условиях помех слева, справа, сверху (требование Министерства по Чрезвычайным ситуациям) на панели З0 17, выполненного, например, в виде клавиатуры, нажатием соответствующих клавиш вводится соответствующая информация в ЦВМ 14. При этом информация от БД 1 обрабатывается ЦВМ 14 с учетом этих ограничений с индикацией сигналов запретов на эволюции на ТЗ 20.
Таким образом, подключение дополнительных источников информации о состоянии крана и его систем (ДУП 5, ДУК 9, ДТ 4, и др.), обработка ее в устройствах ВЧ 2 с индикацией результатов расчетов на УИ 18, ТЗ 20, сопровождение в случае необходимости звуковой сигнализацией на ДЗИ 19 и выработка запретительных сигналов при аварийных эволюциях крана обеспечивают автоматизированное управление работой крана с участием оператора (крановщика).
Использованная литература
1. Ограничитель грузового момента. Консоль.
IK-350/1156. Приложение. PIETZSCH. AUTOMATISTER-UNGSTECNIK GabH Hertzstrabe 32-34 D-7503 Ettlingen Tel. (072 43) 704-0
Издательство: VDMA. Специальное сообщество по подъемным механизмам и средствам добычи в Обществе немецких машиностроителей, зарегистрированное общество Дюссельдорф-Оберкасселель.
2. Система автоматического ограничителя грузоподъемности АС-АОГ-01. Техническое описание и инструкция по эксплуатации АС-0002.00.000.00 ТО
Издатель: Научно-производственный кооператив "Автоматизированные системы", Ростов на Дону, 1993 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 2001 |
|
RU2196102C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2237006C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ И ПОВРЕЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237610C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
Система содержит датчики угла подъема стрелы, длины стрелы и массы груза, цифровую вычислительную машину. Машина предназначена для вычисления критических параметров, сравнения их с предельными и представления оператору текущей информации по информации, поступающей с устройства ввода-вывода. Имеются датчик звуковой информации, блок управляющих реле, дешифратор, подключенный к устройству индикации, и устройство обработки информации. Система снабжена вторым устройством обработки информации, датчиком угла поворота поворотной площадки крана, датчиком угла крена. Табло запретов и устройство блокировки сигналов запрета соединены с устройством ввода-вывода. Первое устройство обработки информации выполнено с дополнительным входом. К этому входу подключен датчик температуры. Ко второму устройству обработки информации подключены датчики угла подъема стрелы, длины стрелы и угла поворота поворотной площадки крана. Датчик угла крена подключен к аналого-цифровому преобразователю. Технический результат - расширение функциональных возможностей, повышение надежности, безопасности и оперативности управления, удобства при обслуживании. 1 ил.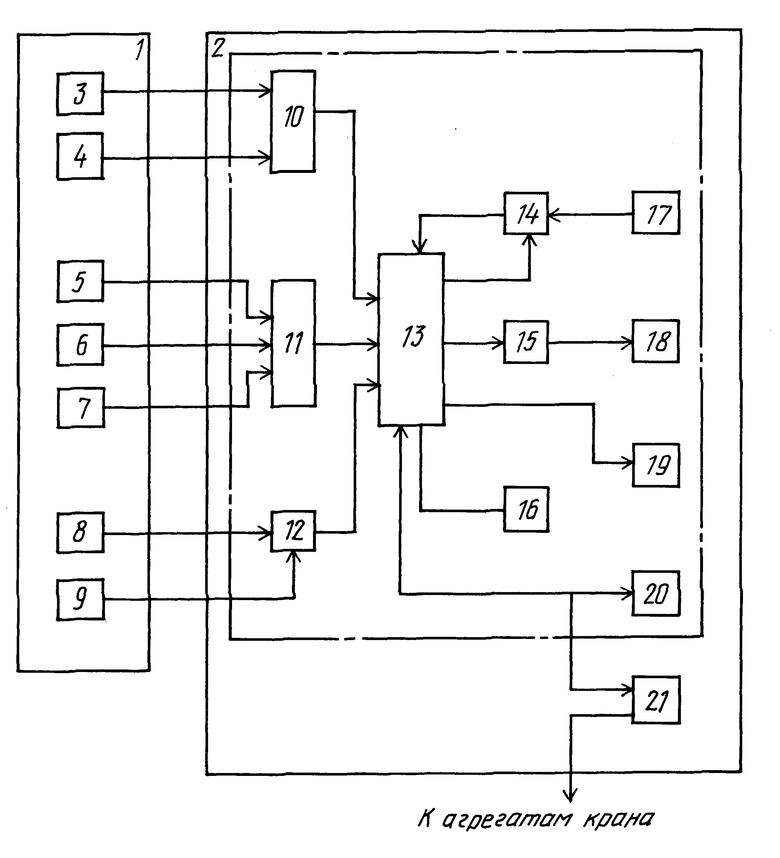
Система управления большегрузным краном, содержащая датчики угла подъема стрелы, длины стрелы и массы груза, цифровую вычислительную машину, предназначенную для вычисления с учетом информации, поступающей от задатчика ограничений, критических параметров по заданному алгоритму, сравнения их с предельными и представления оператору текущей информации по информации, поступающей с устройства ввода-вывода, связанного с аналого-цифровым преобразователем, подключенным к датчику массы груза, датчиком звуковой информации, блоком управляющих реле, дешифратором, подключенным к устройству индикации, и устройством обработки информации, вход которого соединен с датчиком битовой информации, отличающаяся тем, что она снабжена вторым устройством обработки информации, датчиком угла поворота поворотной площадки крана, датчиком угла крена и соединенными с устройством ввода-вывода табло запретов и устройством блокировки сигналов запрета, при этом первое упомянутое устройство обработки информации выполнено с дополнительным входом, к которому подключен датчик температуры, к второму устройству обработки информации подключены датчики угла подъема стрелы, длины стрелы и угла поворота поворотной площадки крана, а датчик угла крена подключен к аналого-цифровому преобразователю.
| ТО и инструкция по эксплуатации, АС-0002.00.000.000 ТО, "Автоматизированные системы", Ростов-на-Дону, 1993, SU 414381 A, 05.11.74 | |||
| Устройство управления приводами механизмов стрелового крана | 1981 |
|
SU979266A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ОТДЕЛКИ ИЗДЕЛИЙ, НАПРИМЕР ДРЕВЕСНО-СТРУЖЕЧНЫХ ПЛИТ, ЛИСТОВЫМИ | 0 |
|
SU160969A1 |
| Ограничитель грузоподъемности кранов | 1973 |
|
SU485062A1 |
