Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для оценки положения космического аппарата, в особенности для оценки положения спутника, вращающегося вокруг Земли. Изобретение также относится к способу оценки положения космического аппарата, к принимающей станции и обрабатывающей станции для участия в оценке положения космического аппарата и к компьютерной программе, которая должна исполняться на принимающей станции или на обрабатывающей станции для участия в оценке положения космического аппарата. Изобретение также относится к отслеживанию положения космического аппарата.
Уровень техники
Определение и знание орбиты спутника в любой точке в любое время является высоковажным для оператора спутника. Орбита может быть извлечена из оценок положения, определенных измерениями. Например, геостационарный спутник номинально располагается (т.е. располагается согласно плану или расчету) на назначенном положении по долготе на геостационарной дуге, вращаясь вокруг Земли.
Более того, система оценки положения спутника позволяет осуществить точное определение маневра. Определение маневра включает в себя планирование и контроль влияющих на орбиту исполняемых маневров, принимая во внимание экономичное (т.е. расчетливое) использование ограниченного количества топлива на борту спутника. Маневры особенно необходимы для сохранения геостационарного спутника на его назначенной долготе. Это позволяет осуществить надежный телекоммуникационный прием и передачу через анизотропные антенны спутника. Такие маневры являются необходимостью, поскольку геостационарная орбита является нестабильной, особенно по причине сил гравитации Луны и Солнца. Маневры также исполняются для изменения орбиты спутника управляемым образом, для того чтобы модифицировать, например, его положение по долготе, которое указывается ссылкой как снос спутника, также как его наклонение или эксцентриситет.
В случае совместного расположения множественных спутников на одной орбитальной долготе существует незначительное расхождение по долготе, наклонению и эксцентриситету между различными спутниками. Такой сценарий является сложным и требует непрерывной оценки местоположения почти в реальном времени и орбитального определения для каждого спутника.
Кроме геостационарных спутников, точная оценка положения может быть очень важной и надлежащей для любого другого типа спутников или космических аппаратов, какой бы ни был их тип назначения или орбита.
Положение спутника может быть определено измерениями двухсторонней задержки. Измерение двухсторонней задержки подразумевает передачу сигнала от передающей наземной станции к спутнику и обратно от спутника к принимающей наземной станции и измерение затраченного времени между передачей сигнала от передающей наземной станции и его приемом на принимающей наземной станции. В любом из последующих способов положение каждой наземной станции предполагается точно известным.
Известный способ, так называемый способ трилатерации, включает в себя три наземные станции, каждая из которых способна передавать и принимать опорный сигнал. Типично, каждая станция независимо измеряет задержку между ее передачей опорного сигнала к спутнику и приемом сигнала назад от спутника, после того как он был ретранслирован спутником. Набор трех станций, выполняющий это действие параллельно, предоставляет три абсолютных измерения расстояния от трех станций до спутника так, что его положение является вычисляемым.
В качестве альтернативы способ трилатерации может быть преобразован в способ псевдодальности. В этом способе двухсторонние задержки не измеряются независимо, а сообща между наземными станциями так, что только одна наземная станция передает одиночный опорный сигнал. Эта первая наземная станция принимает сигнал назад от спутника. Другие станции также принимают одиночный опорный сигнал от спутника, который был передан первой наземной станцией к спутнику. Расстояния между другими наземными станциями и спутником, следовательно, вычисляются неявно.
Способ псевдодальности требует общей привязки по времени между наземными станциями, тогда как вышеописанный способ трилатерации не требует этого в обязательном порядке.
Оценка положения спутника может быть осуществлена, решая задачу пересечения трех сфер или используя алгоритм, такой как описан в D.E. Manolakis: Efficient solution and performance analysis of 3-D position estimation by trilateration, IEEE trans. on Aerospace & Electronic Systems, Vol. 32, No. 4, Oct. 1996, pp 1239-1248.
Существует постоянная потребность в улучшении систем и способов оценки положения космического аппарата, такого как спутник.
Лексическое примечание
Перед описанием сущности изобретения будет объяснено использование фразы "и/или" в материалах настоящей заявки.
В каждом отдельном случае фраза "и/или" используется для указания того, что термины, признаки или пункты, соединенные таким образом, должны быть взяты в совокупности или индивидуально, таким образом, предоставляя три приведенных или заданных варианта осуществления. Другими словами, если А и B являются двумя терминами, признаками или пунктами, выражение "A и/или B" охватывает три альтернативных решения: "A и В", "A" и "B".
Когда сначала используется выражение "A и/или B", а затем используется второе выражение "A и/или B" (например, в пункте формулы изобретения или в пункте формулы изобретения или одном из ее зависимых пунктов изобретения), это охватывает пять альтернативных решений:
- первые "A и B", а затем вторые "A и B",
- первые "A и B", а затем второе "A",
- первые "A и B", а затем второе "B",
- первое "A", а затем второе "A", и
- первое "B", а затем второе "B".
Дополнительные использования фразы "и/или" будут понятны в соответствии с этими принципами, в которых не охватываются противоречивые сочетания. Например, когда "A и/или B" следует за "C и/или D", каждое выражение охватывает три альтернативных решения, таким образом, охватывая девять альтернативных решений. Однако, например, когда "C" является заменителем "объекта А", и когда "D" является заменителем "объекта B", будет понятно, что когда "A и/или B" следует за "C и/или D", это охватывает только пять альтернативных решений.
Сущность изобретения
Настоящее изобретение направлено на удовлетворение вышеупомянутой потребности улучшением систем и способов оценки положения космического аппарата, как например, положения спутника.
Согласно изобретению, предоставлена система для оценки положения космического аппарата. Она включает в себя множество принимающих станций, выполненных с возможностью принимать сигналы, переданные от космического аппарата, и обрабатывающую станцию, выполненную с возможностью принимать данные от множества принимающих станций. Каждая из принимающих станций выполнена с возможностью записывать во время временного окна, в материалах настоящей заявки указываемого ссылкой как окно записи, сигналы, переданные от космического аппарата, и передавать в обрабатывающую станцию данные, представляющие записанные сигналы во время окна записи. Окна записи, ассоциированные с каждой из принимающих станций, выполнены с возможностью быть сдвинутыми и/или иметь различный размер (т.е. различную длину или продолжительность) по отношению друг к другу. Обрабатывающая станция выполнена с возможностью коррелировать записанные сигналы для оценки для каждой, по меньшей мере, из одной пары среди множества принимающих станций разности расстояний между космическим аппаратом и каждой принимающей станцией из пары и на основе этого положения космического аппарата.
Таким образом, в первом альтернативном решении, окна записи, ассоциированные с каждой из принимающих станций, выполнены с возможностью быть сдвинутыми по отношению друг к другу. Во втором альтернативном решении, окна записи, ассоциированные с каждой из принимающих станций, выполнены с возможностью иметь различный размер по отношению друг к другу. В третьем альтернативном решении, окна записи, ассоциированные с каждой из принимающих станций, выполнены с возможностью быть сдвинутыми и иметь различный размер по отношению друг к другу.
Далее это будет разъяснено подробно. Множество принимающих станций выполнено с возможностью принимать радиочастотные сигналы, переданные от космического аппарата. Каждая из множества принимающих станций записывает во время окна записи радиочастотные сигналы, переданные от космического аппарата.
Давайте рассмотрим две из этих принимающих станций. Каждая из двух принимающих станций записывает во время окна записи или интервала последовательность радиочастотных сигналов, приходящих от космического аппарата по радиоинтерфейсу. Начало и конец окна записи известны на основании привязки по времени общей для двух принимающих станций. Далее, обе последовательности радиочастотных сигналов, записанных на двух принимающих станциях, передаются в обрабатывающую станцию. Информация о начале и конце окна записи, соответствующая последовательности радиочастотных сигналов, переданных от каждой из двух принимающих станций, является либо априори известной обрабатывающей станции или передается принимающими станциями в обрабатывающую станцию. Обрабатывающей станции не требуется никакой информации о том, когда последовательность радиочастотных сигналов была передана от космического аппарата. Аналогично, обрабатывающей станции не требуется никакой информации о природе последовательности радиочастотных сигналов. Обрабатывающая станция определяет на основании известного общего временного базиса разность времени между моментами прихода сигналов (TDOA) части радиочастотной последовательности, которая была принята и записана на двух принимающих станциях во время двух соответственных окон записи.
Разность времени между моментами прихода сигналов радиочастотной последовательности на первой и второй принимающих станциях соответствует разности расстояний между космическим аппаратом и первой принимающей станцией и между космическим аппаратом и второй принимающей станцией. Эта разность времени или смещение определяется корреляцией на обрабатывающей станции двух последовательностей радиочастотных сигналов. Корреляционный пик соответствует разности времени или смещению.
Посредством корреляции пары записанных радиочастотных последовательностей, принятых на первой и второй принимающих станциях, учитывая свойства среды распространения, может быть определена разность в расстоянии между космическим аппаратом и первой и второй принимающими станциями. В пределах окон записи, соответствующих паре записанных радиочастотных последовательностей, должен быть перекрывающийся интервал, во время которого одинаковая часть первоначальной радиочастотной последовательности, переданная от космического аппарата, была принята на первой и второй принимающих станциях. Космический аппарат расположен на двуполостном гиперболоиде, соответствующем набору точек в пространстве, для которого разность в расстоянии между космическим аппаратом и первой и второй принимающими станциями является константой.
Повторяя один и тот же процесс в один и тот же момент времени или, по существу, в один и тот же момент времени для второй пары принимающих станций и, если необходимо, для третьей пары принимающих станций, могут быть определены два других гиперболоида, на которых может быть расположен космический аппарат. Космический аппарат может быть оценен как находящийся на пересечении этих гиперболоидов.
Как объяснено выше, записанные сигналы коррелируются парой на обрабатывающей станции. Идентификация пересечения гиперболоидов предоставляет оценку положения космического аппарата. Этот процесс, также известный как трехмерное гиперболическое позиционирование, требует передачи фактических последовательностей записанных сигналов в обрабатывающую станцию. В дополнение, последовательности сигналов должны быть записаны в пределах достаточно длинного окна записи для получения значащего корреляционного пика. Выигрыш при корреляционной обработке извлекается из имеющейся в распоряжении ширины полосы частот сигнала умноженной на время выборки.
Способ является предпочтительным в том, что от космического аппарата не требуется отправки шаблона опорного сигнала либо на физическом уровне, либо в модулированной полезной нагрузке. Способ также не требует никакой последовательности запуска, излученной космическим аппаратом, для того чтобы дать возможность записи на принимающих станциях. Более того, космический аппарат не должен быть специально адаптирован. В этом смысле способ является пассивным. Не требуется осуществляющего взаимодействия космического аппарата. От космического аппарата требуется только отправить несколько электромагнитных сигналов, которые могут быть детектированы принимающими станциями. Уже было сказано, однако способ может справляться и использовать шаблоны опорных сигналов и последовательности запуска, излученные космическим аппаратом, чтобы дать возможность записи на принимающих станциях.
Когда проектируют такой способ и систему, возникает потребность для передачи последовательностей записанных сигналов, соответствующих окнам записи, имеющим достаточную длину, чтобы учесть разность в расстоянии между космическим аппаратом и каждой из первой и второй принимающих станций, одновременно все-таки включая в себя достаточное временное перекрытие по отношению к первоначально переданной последовательности для обеспечения значащей корреляции. В настоящий момент осознано, что реализация способа или системы, удовлетворяющей такой потребности, может значительно увеличить нагрузку на линиях связи между каждой из принимающих станций и обрабатывающей станцией.
Дополнительно осознано, что это особенно является случаем, когда осуществляется отслеживание положения космического аппарата, которое требует последовательности частых оценок положения, для того чтобы, например, надлежащим образом и своевременно управлять маневром. Местоположение принимающих станций на большом расстоянии друг от друга (например, разнося больше чем на 500 километров) является предпочтительным для увеличения угловой разрешающей способности процесса и прогноза оценки положения космического аппарата. Расстояния между каждой из принимающих станций и обрабатывающей станцией могут, следовательно, быть такими большими, что линий радиовидимости между принимающими станциями и обрабатывающей станцией не существует. Это дополнительно увеличивает сетевую нагрузку, вызванную передачей записанных последовательностей.
При осуществлении сдвига окон записи преднамеренным и управляемым образом количество данных, которые должны быть переданы в обрабатывающую станцию, уменьшается. В дополнение или в альтернативном варианте (таким образом, обеспечивая три альтернативных решения), при установке преднамеренным и управляемым образом размера каждого окна записи индивидуально, так что окна записи выполняются с возможностью иметь различный размер по отношению друг к другу, количество данных, которые должны быть переданы в обрабатывающую станцию, также может быть уменьшено. Вместо того чтобы записывать принятые последовательности сигналов во время одного и того же окна записи (одного и того же по отношению к общей привязке по времени) на каждой из принимающих станций, окна записи сдвигаются и/или их размер различным образом устанавливается по отношению друг к другу. Из подробного описания конкретных вариантов осуществления со ссылкой на чертежи (например, фиг.3b) будет очевидно, как в некоторых вариантах осуществления, что могут быть вычислены сдвиги между окнами записи и/или индивидуальный размер каждого окна.
Система измерения дальности, раскрытая в US 2004/0140930 Al (в материалах настоящей заявки указываемая ссылкой как "c.[1]"), также относится к оценке положения космического аппарата. Интересно освещать отличия между c.[1] и системой и способом изобретения, но лучше понять изобретение. В системе c.[1] расстояния между космическим аппаратом и каждой, по меньшей мере, из трех принимающих станций определяется на принимающих станциях. Значения определенных расстояний отправляются в центральную обрабатывающую станцию, и на основе этого оценивается положение космического аппарата. Оценка основана на вычислении трилатерации по значениям расстояний.
В одном варианте осуществления в c.[1], как проиллюстрировано на его фиг.6, передающая станция (цифра 605 на фиг.6) и принимающая станция (цифра 613 на фиг.6) совместно используются для предоставления двухсторонней задержки (разности между временем излучения и временем приема), предоставляющей измерение одного расстояния.
Изобретение заметно отличается от c.[1] в том, что в изобретении сигналы, фактически записанные на двух принимающих станциях, отправляются в обрабатывающую станцию, чтобы быть коррелированными там попарно. В дополнение, изобретение использует осуществление управляемого временного сдвига между окнами записи и/или установкой индивидуального размера окон записи на каждой принимающей станции для уменьшения нагрузки на сеть, вызванной передачей записанных сигналов. Осуществление сдвига и/или установка размера окон записи как не раскрыто, так даже и не требуется в c.[1]. Проблема уменьшения нагрузки на сеть, вызванная системой измерения дальности, не поднимается в c.[1], поскольку фактически принятые и записанные сигналы не отправляются по сети в центральную обрабатывающую станцию для того, чтобы вычислять разность времени копий сигналов, записанных на принимающих станциях. Отправляются только значения расстояний и временные отметки (например, одно из времени излучения и времени приема на фиг.6 c.[1]).
В вышеописанном варианте осуществления изобретения окна записи выполнены с возможностью быть сдвинутыми во времени и/или различаться в размере по отношению друг к другу. Как осознает специалист в данной области техники, это не исключает эпизодического временного сдвига, который был бы близким к значению "0" между двумя окнами записи (например, сдвиг между началом двух окон записи). Так же, это не исключает возникающего время от времени почти равного размера между двумя окнами записи. Аспект изобретения, заключающийся в том, что окна записи выполнены с возможностью быть сдвинутыми во времени и/или различаться в размере по отношению друг к другу, отображает способность с точки зрения конфигурационной перспективы системы позиционирования осуществлять сдвиг и/или индивидуально изменять размер окон записи преднамеренным и управляемым образом, для того чтобы уменьшить количество данных, которые должны быть переданы в обрабатывающую станцию. Преднамеренное и управляемое осуществление сдвига и/или установка размера основано на априорном знании разности в расстоянии между первой принимающей станцией и космическим аппаратом и второй принимающей станцией и космическим аппаратом.
Сдвиг, ассоциированный с парой принимающих станций, является сдвигом по отношению к общей привязке по времени. В одном варианте осуществления, принимающие станции снабжены часами, синхронизированными друг с другом.
В одном варианте осуществления, некоторые из принимающих станций не синхронизированы по времени по отношению друг к другу. Компоненты и структура некоторых из принимающих станций могут также отличаться, таким образом, вызывая временной сдвиг по отношению друг к другу по причине индивидуальных присущих задержек станции. Количество десинхронизации между принимающими станциями известно обрабатывающей станции, так что обрабатывающая станция способна к отправке значимых команд сдвига (значимых с точки зрения привязки по времени). Другими словами, даже если не существует временной синхронизации, и/или существует разница в компонентах и структуре между принимающими станциями, поскольку обрабатывающая станция знает протяженность временной десинхронизации или разницу компонентов или структур между принимающими станциями, обрабатывающая станция может учесть десинхронизацию и разницы компонентов и структур, для того чтобы надлежащим образом генерировать команды сдвига окна и/или размера (или команды запуска) для принимающих станций и надлежащим образом обрабатывать результаты (записанные данные) для значимой корреляции.
Проблемы, решаемые изобретением, являются существенными для определения положения космического аппарата и не применяются напрямую (или, по меньшей мере, с большим трудом применяются) для определения положения самолета, как, например, в контексте управления воздушным движением. В управлении воздушным движением принимающие станции расположены только на расстоянии нескольких километров (больше чем 50 километров), часто имея радиовидимость между принимающими станциями и центральной обрабатывающей станцией. Более того, текущее положение самолета может быть где-либо в географической зоне, покрытой радиусом приема принимающих станций. В дополнение, траектория самолета может быть чрезвычайно динамической и непредсказуемой по высоте или направлению. Осуществление сдвига и изменение размера для окон записи решает проблемы, которые присущи космическим аппаратам, а особенно геостационарным спутникам. Это связано с геометрическим расположением принимающих станций (расположенных на большом расстоянии друг от друга, предпочтительно больше чем 500 километров) и с тем обстоятельством, что спутники находятся на геостационарной или квазигеостационарной орбите на 36000 километров выше поверхности Земли (при этом положение спутника может быть достаточно четко прогнозировано). По причине существенных расстояний между принимающими станциями и спутником, времена поступления сигнала спутника отличаются намного больше во времени, чем результирующий размер окна, требуемый для получения хорошего корреляционного пика. Осуществление сдвига и/или изменение размера окон записи оптимизирует издержки по размеру окна и обращается к вопросу пересылки большого количества данных в центральную обрабатывающую станцию.
В частном варианте осуществления, космический аппарат ограничен в пределах конкретной "ячейки пространства". Эта ячейка пространства может быть квазигеостационарной дугой и тем самым ограничивает место, где может быть расположен космический аппарат, и непосредственно переводит это в разности в расстоянии между принимающими станциями и космическим аппаратом и в размер окна и временной сдвиг для различных принимающих станций.
В одном варианте осуществления, одна из принимающих станций расположена совместно с обрабатывающей станцией.
В одном варианте осуществления, данные, переданные от принимающей станции в обрабатывающую станцию, оцифровываются для передачи. Это увеличивает надежность системы.
В одном варианте осуществления, корреляция обрабатывающей станцией включает в себя корреляцию пар записанных сигналов, детектирование положения корреляционного пика, представляющего смещение во времени между двумя копиями, вычисление трехмерной гиперболы или двуполостного гиперболоида, соответствующего каждой паре, и вычисление пересечения гиперболоидов, что является местоположением космического аппарата. Чтобы справиться со случаями, в которых пересечение больше чем двух гиперболоидов не приводит к единственной точке, вычисление может включать в себя оптимизацию, включающую в себя, например, метод наименьших квадратов, для нахождения ближайшей (наиболее подходящей) точки пересечения и, таким образом, положения.
В одном варианте осуществления, корреляция обрабатывающей станцией включает в себя корреляцию пар записанных сигналов, детектирование положения корреляционного пика, представляющего смещение во времени между копиями двух сигналов, вычисление результирующих разностей во времени прохождения сигнала от спутника к соответственным принимающим станциям с известными положениями. Эти данные предоставляются в отдельную систему, вычисляющую местоположение космического аппарата.
В одном варианте осуществления, часы каждой из множества принимающих станций синхронизируются.
В одном варианте осуществления, сдвиг между окнами записи, ассоциированными с двумя принимающими станциями, и/или соответственный размер окон записи выполнены с возможностью быть вычисленными на основе информации о положении космического аппарата и положении двух принимающих станций. Временной сдвиг и/или размеры окон могут быть вычислены обрабатывающей станцией.
В одном варианте осуществления, соответственные размер окна и/или временной сдвиг между окнами записи, ассоциированными с двумя принимающими станциями, выполнены с возможностью быть априори известными соответственным принимающим станциям и не имеют потребности в том, чтобы быть предоставленными обрабатывающей станцией.
В одном варианте осуществления, система служит не только для оценки положения космического аппарата, но также для отслеживания его положения во времени. В этом варианте осуществления, сдвиг между окнами записи, ассоциированными с двумя принимающими станциями, выполнен с возможностью быть вычисленным на основе или дополнительно на основе (если сдвиг уже вычислен на основе знания, заблаговременно, положения космического аппарата) информации о положении космического аппарата, как оценивается самой обрабатывающей станцией (на одном или более предыдущих операционных этапах).
В одном варианте осуществления, отслеживание положения космического аппарата во времени администрируется каждой принимающей станцией независимо, используя априорную информацию, предоставленную прогнозами сдвига окна и/или установок размера, и не имеет надобности в том, чтобы быть предоставленной обрабатывающей станцией.
Отслеживание или контур обратной связи может быть обеспечен, как следует ниже. На основе знания положения космического аппарата, полученного заблаговременно, или разности в расстоянии между принимающими станциями и космическим аппаратом (положение космического аппарата не обязательно необходимо, разности дальности/времени для пары принимающих станций достаточно для контура обратной связи, для того чтобы обработка также действовала изолированно для одной единственной пары принимающих станций) и на основе предварительно определенного знания положения принимающих станций, обрабатывающая станция передает команды сдвига окна и/или установки размера в принимающие станции.
Термин "дальность" указывает ссылкой в материалах настоящей заявки на расстояние между космическим аппаратом (или, в одном варианте осуществления, спутником) и принимающей станцией.
Каждая принимающая станция записывает, на основе команды сдвига окна и/или установки размера, принятой от обрабатывающей станции, последовательности сигналов, принятые от космического аппарата, и последовательность отправляется в обрабатывающую станцию. Обрабатывающая станция принимает вновь записанные последовательности сигналов. Она пересчитывает, т.е. обновляет оценку положения космического аппарата, повторно вычисляет разность в расстоянии между принимающими станциями и космическим аппаратом и, наконец, вычисляет новые сдвиги окон и/или размеры окон, которые должны быть переданы. Цикл отслеживания затем исполняется снова. Система и способ дает возможность значительно уменьшить количество данных, которые должны быть переданы по линиям связи между принимающей и обрабатывающей станциями.
Размеры окна записи могут быть адаптированы и управляться обрабатывающей станцией в значительной мере на основе степени точности относительно априорного знания положения космического аппарата. В этом варианте осуществления, обрабатывающая станция не только отправляет команды сдвига в принимающие станции, но также команды размера окна. Команда сдвига определяет начало окна записи, а команда размера - его размер. В одном варианте осуществления, размеры окна записи не адаптированы, а предпочтительно определены заблаговременно, принимая во внимание все или большинство известных относящихся ко времени параметров системы, включающих в себя, например, временные разности, вызванные круговым перемещением спутника за день или после маневра или изменений задержек, привнесенных атмосферой.
Отслеживание положения спутника и эффективное использование знания о последнем положении для определения сдвигов и, необязательно, записывание размера окна близко взаимосвязаны.
В одном варианте осуществления, отслеживание осуществляется в реальном времени. "Реальное время" означает здесь операционные сроки завершения в отношении системного ответа, чтобы дать быстрое и успешное определение маневра. Отслеживание в реальном времени и управление положением могут быть крайне необходимыми для управления положением и маневрами, используя бортовой двигатель(и) спутника.
В одном варианте осуществления, на принимающих станциях используется скорость одной операции записи в секунду и одной оценки результирующего положения для отслеживания. В одном варианте осуществления, используется для отслеживания скорость, находящаяся между одной операцией записи за 0,1 секунды и одной операцией записи за 24 часа.
Когда используется отслеживание окна, местоположение корреляционного пика детектируется, и окна сдвигаются для максимизирования их соответственного перекрытия содержания для следующей итерации, с тем чтобы, следовательно, отследить разность времени между сигналами. Для такого отслеживания для спутников позволено прогнозирование положения, поскольку они типично подвержены относительно медленным и постоянным передвижениям во времени относительно принимающих станций.
В одном варианте осуществления, в котором используется отслеживание, сдвиг выполняется с возможностью быть вычисленным между первой операцией записи и второй операцией записи на основе оцененного положения космического аппарата, извлеченного из первой операции записи. Первая и вторая операции записи могут быть, например, разделены на 0,1 секунды для 12 часов. Первая и вторая операции записи могут быть двумя последовательными операциями записи.
В одном варианте осуществления, по меньшей мере, одна из принимающих станций расположена вне зоны обслуживания нисходящей линии связи главного лепестка космического аппарата. Такая конфигурация, в частности, хорошо адаптирована для оценки положения космического аппарата, который использует анизотропную или направленную антенну с узкой диаграммой направленности излучения для осуществления связи по направлению к ограниченной зоне на Земле, вместе с этим позволяя принимающим станциям быть на достаточно большом расстоянии друг от друга для предоставления хорошей угловой разрешающей способности для определения положения космического аппарата. Чем дальше принимающие станции находятся друг от друга, тем лучше разрешающая способность.
Это может быть дополнительно объяснено, как следует ниже. Система основана на корреляции записанных сигналов. Таким образом, по причине свойственного выигрыша в обработке корреляционной технологии, сигналы с низким или отрицательным отношением S/N (сигнал/шум) могут быть использованы в корреляционном процессе, так как выигрыш корреляции первостепенно определяется через результат ширины полосы частот сигнала умноженной на время выборки окон записи. Выигрыш корреляции, следовательно, используется для компенсации низкого или негативного отношения S/N оригинальных сигналов, а корреляция может тем не менее обеспечивать значительный пик.
В одном варианте осуществления, каждое окно записи имеет достаточно маленькую продолжительность так, что эффект Доплера, эффекты атмосферы (которые могут вызывать искажения) и несовершенство принимающих входных каскадов принимающих станций не имеют значительного воздействия на корреляцию, осуществляемую обрабатывающей станцией, или, другими словами так, что корреляционная обработка не значительно затрагивается смещениями частоты вызванными эффектом Доплера, вызванными атмосферой искажениями и несовершенствами входных каскадов принимающих станций.
В одном варианте осуществления, по меньшей мере, одно из окон записи имеет размер, находящийся между 4 микросекундами и 10 миллисекундами. В одном варианте осуществления, каждое из окон записи имеет размер, находящийся между 4 микросекундами и 10 миллисекундами. Эти варианты осуществления предоставляют, для применений в космических аппаратах, хороший компромисс между обладанием достаточно длинным окном записи для получения значащего корреляционного пика и обладанием достаточно коротким окном записи для уменьшения нагрузки на линиях связи между принимающими и обрабатывающими станциями.
В одном варианте осуществления, оценивается положение негеостационарного спутника.
В одном варианте осуществления, данные, отправленные от принимающей станции в обрабатывающую станцию, содержат в себе любой вид информации о согласовании во времени, касающейся окна.
Изобретение также относится к способу оценки положения космического аппарата, используя множество принимающих станций, выполненных с возможностью приема сигналов, переданных от космического аппарата, и обрабатывающую станцию, выполненную с возможностью принимать данные от множества принимающих станций. Способ включает в себя процедуру записи и передачи и процедуру корреляции. Процедура записи и передачи включает в себя запись каждой из принимающих станций во время окна записи сигналов, переданных от космического аппарата, и передачу каждой из принимающих станций в обрабатывающую станцию данных, представляющих записанные сигналы, во время окна записи. Окна записи, ассоциированные с каждой из принимающих станций, сдвинуты и/или имеют различный размер (т.е. длину или продолжительность) по отношению друг к другу. Процедура корреляции включает в себя корреляцию обрабатывающей станцией записанных сигналов для оценки для каждой, по меньшей мере, из одной пары среди принимающих станций разности расстояний между космическим аппаратом и каждой принимающей станцией из пары и на основе этого положения космического аппарата.
Изобретение относится к принимающей станции для участия в оценке положения космического аппарата. Принимающая станция содержит первый приемник, второй приемник, записывающее устройство и передатчик. Первый приемник выполнен с возможностью принимать сигналы, переданные от космического аппарата. Второй приемник выполнен с возможностью принимать указание времени запуска от обрабатывающей станции в качестве инструкции для начала окна записи и/или указания размера окна в качестве инструкции о размере окна записи. Записывающее устройство выполнено с возможностью записи во время окна записи, запускающегося согласно принятому указанию времени запуска и/или указанию размера окна, сигналов, переданных от космического аппарата. Передатчик выполнен с возможностью передачи в обрабатывающую станцию данных, представляющих сигналы, записанные во время окна записи.
Изобретение также относится к обрабатывающей станции для участия в оценке положения космического аппарата. Обрабатывающая станция содержит передатчик, приемник и коррелятор. Передатчик выполнен с возможностью передачи в каждую из множества принимающих станций, выполненных с возможностью принимать сигналы, переданные от космического аппарата, указания времени запуска, ссылающегося на начало окна записи, и/или указания размера окна в качестве инструкции к размеру окна записи. Приемник выполнен с возможностью приема от каждой из множества принимающих станций данных, представляющих записанные сигналы, переданные от космического аппарата во время окна записи. Окна записи, ассоциированные с каждой из принимающих станций, выполнены с возможностью быть сдвинутыми или иметь различный размер по отношению друг к другу. Коррелятор выполнен с возможностью корреляции записанных сигналов для оценки для каждой, по меньшей мере, из одной пары среди множества принимающих станций разности расстояния между космическим аппаратом и каждой принимающей станцией из пары и на основе этого положения космического аппарата.
Изобретение также относится к компьютерной программе, сконфигурированной, когда исполняется на принимающей станции или на обрабатывающей станции, для осуществления соответственно конкретных процедур принимающей станции или конкретных процедур обрабатывающей станции вышеописанного способа изобретения.
Краткое описание чертежей
Далее будут описаны варианты осуществления настоящего изобретения в сочетании с прилагаемыми чертежами, на которых:
Фиг.1 схематически иллюстрирует систему согласно одному варианту осуществления изобретения, где внизу чертежа проиллюстрировано осуществление сдвига окна и установка индивидуального размера окна;
Фиг.2, 3a и 3b схематически иллюстрируют способы согласно вариантам осуществления изобретения;
Фиг.4 схематически иллюстрирует принимающую станцию согласно одному варианту осуществления изобретения;
Фиг.5 схематически иллюстрирует обрабатывающую станцию согласно одному варианту осуществления изобретения;
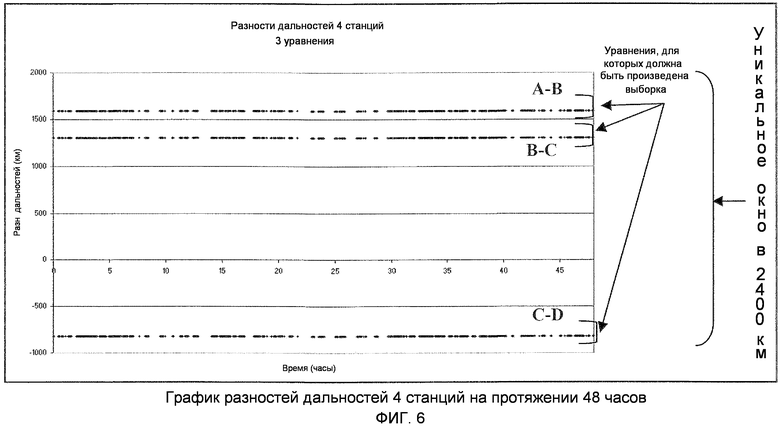
Фиг.6 показывает пример разностей дальностей, ассоциированных с тремя парами принимающих станций A-B, B-C и C-D в течение периода 48 часов для содействия пониманию проблем, ассоциированных с размером окна записи;
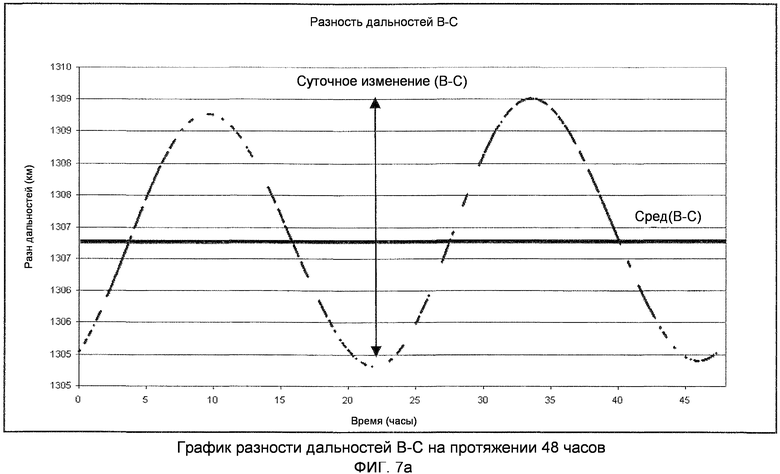
Фиг.7а показывает пример разности дальностей между принимающими станциями B и С в течение 48 часов;
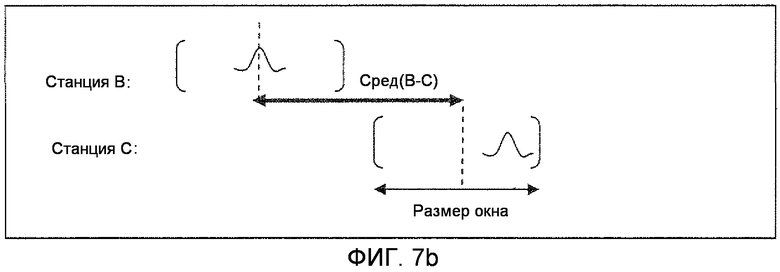
Фиг.7b показывает примеры окон записи для двух принимающих станций B и C; и
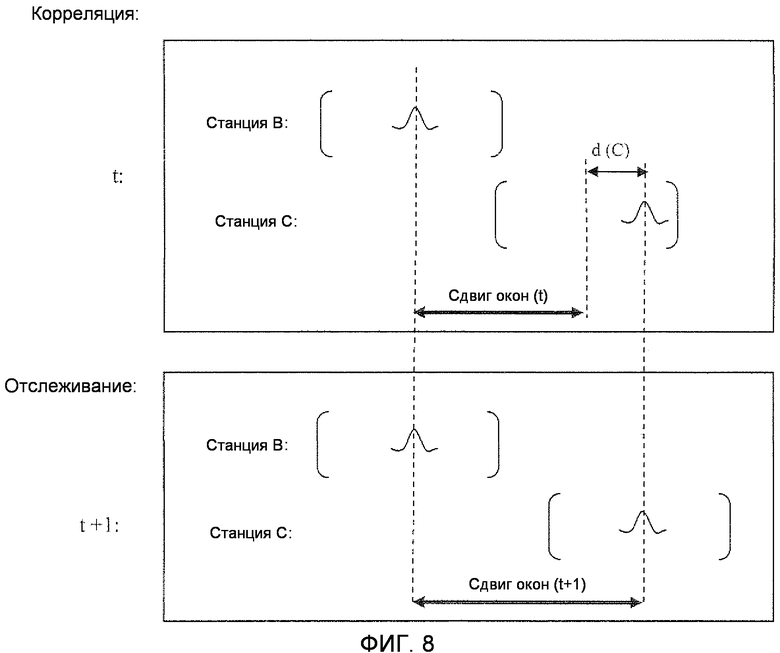
Фиг.8 показывает примеры окон записи для двух принимающих станций B и С во время t и t+1 в контексте системы отслеживания положения космического аппарата.
Подробное описание
Настоящее изобретение теперь будет описано в сочетании с конкретными вариантами осуществления. Может быть замечено, что конкретные варианты осуществления служат для того, чтобы дать специалисту в данной области техники лучшее понимание, а не предназначены любым способом ограничить объем изобретения, который задан прилагаемой формулой изобретения. В частности, вариант осуществления, описываемый независимо на всем продолжении описания, может быть объединен для образования дополнительных вариантов осуществления, в случае если они не являются взаимоисключающими.
Фиг.1 схематически иллюстрирует космический аппарат 6, принимающие станции 4a, 4b, 4c, 4d, расположенные на поверхности Земли на отличающихся положениях, и обрабатывающую станцию 2 согласно одному варианту осуществления изобретения. Космический аппарат 6 излучает радиочастотный сигнал по направлению к принимающим станциям, как проиллюстрировано пунктирными линиями, берущими начало от космического аппарата 6. Радиочастотные сигналы, переданные от космического аппарата 6, принимаются на принимающих станциях 4a, 4b, 4c, 4d.
Принимающие станции 4a, 4b, 4c, 4d записывают каждая во время конкретного окна 84a, 84b, 84c, 84d записи принятые последовательности радиочастотных сигналов. Природа или содержание последовательностей сигналов заранее не известны принимающим станциям 4a, 4b, 4c, 4d и, следовательно, не существует корреляции, осуществляемой на принимающих станциях между последовательностями принятых сигналов и предварительно определенной последовательностью или известным шаблоном. Космическому аппарату 6 не требуется отправлять ни выделенного сигнала для измерения дальности, цифровой битовой последовательности, ни последовательности для запуска записывания. Любой сигнал полезной нагрузки или канала связи, излучаемый космическим аппаратом 6, может быть использован для процесса оценки, включающего в себя относящиеся цифровые или аналоговые сигналы полезной нагрузки, телеметрические маяки или шумы ламп транспондера.
Принятые последовательности сигналов передаются от принимающих станций 4a, 4b, 4c, 4d в обрабатывающую станцию 2. Последовательности сигналов могут быть оцифрованы для передачи.
Как схематически проиллюстрировано внизу фиг.1, каждая из принимающих станций 4a, 4b, 4c, 4d выполнена с возможностью записывать принятые сигналы во время окна 84a, 84b, 84c, 84d записи соответственно. В отношении общего момента времени (как проиллюстрировано вертикальной пунктирной линией снизу слева фиг.1) окна 84a, 84b, 84c, 84d записи соответственно сдвинуты на сдвиг Δt4a, Δt4b, Δt4c, Δt4d (где Δ является греческой буквой дельта и обозначает здесь сдвиг). Следовательно, сдвиг между окнами 84a, 84b пары принимающих станций 4a, 4b равен
Δt4b-Δt4a
и является отрицательным значением в примерной иллюстрации фиг.1. Сдвиг между началом окон 84b, 84c записи второй пары принимающих станций 4b, 4c равен
Δt4c-Δt4b
и является отрицательным значением в примерной иллюстрации фиг.1. В заключение сдвиг между окнами 84c, 84d записи третьей пары принимающих станций 4с, 4d равен
Δt4d-Δt4c
и является положительным значением в примерной иллюстрации фиг.1.
Размеры окон 84a, 84b, 84c, 84d записи являются соответственно size4a, size4b, size4c, size4d. Размеры могут быть установлены индивидуально для каждого окна 8 записи и могут, следовательно, отличаться друг от друга, как проиллюстрировано. Использование различных размеров окон, ассоциированных с принимающими станциями 4, уменьшает максимальное перекрытие содержаний окон 8 записи для корреляционного процесса.
Фиг.1 иллюстрирует использование как сдвига окон, так и установки индивидуальных размеров. Использование только одной из этих двух технологий также возможно.
Число принимающих станций не ограничено четырьмя. Если априорная информация является доступной в отношении положения космического аппарата, система позиционирования космического аппарата может включать в себя только одну пару принимающих станций или только две пары принимающих станций. Подобным образом больше чем три пары принимающих станций, образующих больше чем четыре принимающие станции, могут быть использованы для увеличения точности оценки.
Последовательности сигналов, записанные на принимающих станциях 4a, 4b, 4c, 4d, отправляются в обрабатывающую станцию 2, на которой осуществляется попарная корреляция. Также может быть определен следующий сдвиг, который должен быть использован для окон записи на каждой из принимающих станций 4.
Определение положения космического аппарата 6 основано на вычислении разности времени между моментами прихода сигналов (TDOA; на соответственных принимающих станциях, расположенных на известных положениях на Земле). Это может быть визуализировано и математически решено как определение пересечения двуполостных гиперболоидов. Каждый гиперболоид получают идентификацией корреляционного пика, ассоциированного с парой принимающих станций 4, как описано выше. Определение пересечения двуполостных гиперболоидов для оценки положения космического аппарата может быть выполнено решением системы нелинейных уравнений. В том случае, когда не может быть найдено решения системы нелинейных уравнений, оптимальное или наиболее близкое решение в терминах метода наименьших квадратов или подобного может быть выбрано в качестве положения космического аппарата.
Информация о положении спутника может быть предоставлена на экране компьютера (не проиллюстрировано) для содействия пользователю в определении, должен ли быть выполнен маневр или маневр был исполнен, как предполагалось, или в вычислении орбиты космического аппарата. Информация о положении спутника может быть в любом виде, включающим в себя визуализацию или математическое выражение. Более того, информация о положении спутника и/или о разностях в расстояниях между космическим аппаратом и множеством принимающих станций может быть предоставлена в любом виде любой другой системе, используя информацию в качестве входных данных для обработки объединенной или разделенной с системой изобретения.
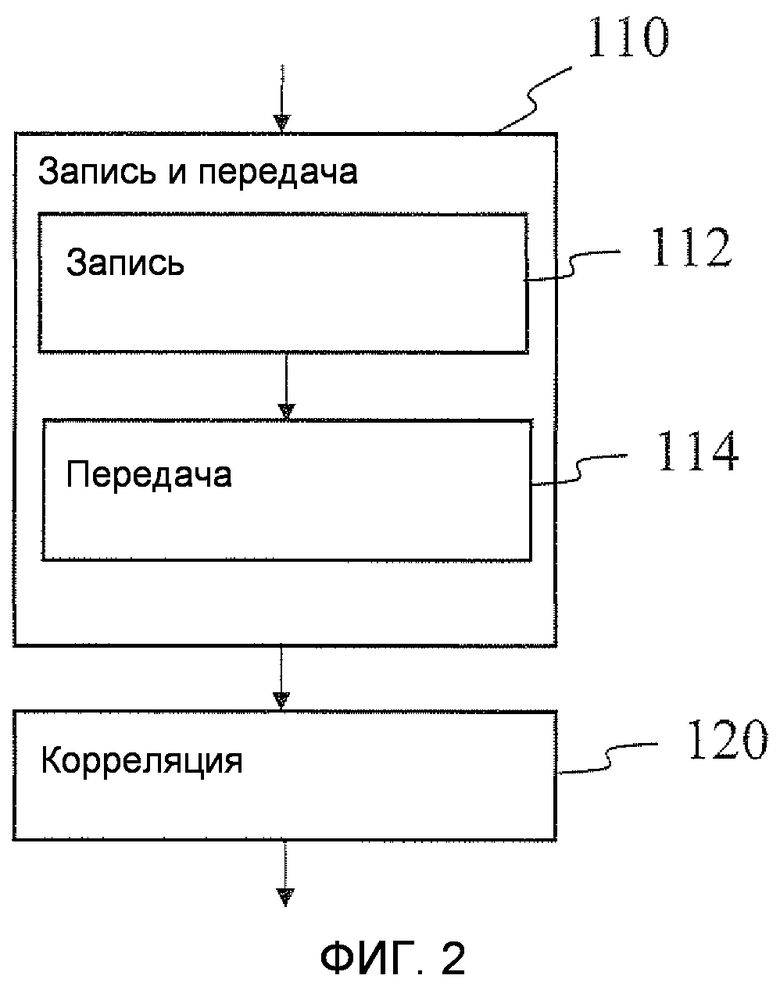
Фиг.2 иллюстрирует способ согласно одному варианту осуществления изобретения. Способ включает в себя процедуру 110 записи и передачи, включающую в себя запись 112 каждой из принимающих станций 4 во время окна 8 записи сигналов, переданных от космического аппарата 6, и передачу 114 каждой из принимающих станций 4 в обрабатывающую станцию 2 данных, предоставляющих записанные сигналы, которые были записаны во время окна 8 записи. Как объяснено выше, окна 8 записи, ассоциированные с каждой из принимающих станций 4, сдвинуты и/или имеют различный размер по отношению друг к другу.
Способ также включает в себя процедуру 120 корреляции, включающую в себя корреляцию обрабатывающей станцией 2 записанных сигналов для оценки разности расстояния между космическим аппаратом 6 и каждой одной из принимающих станций 4 пары принимающих станций 4 (и т.д., подобным образом для других пар принимающих станций, если необходимо) и, на основе этого, положения космического аппарата. Корреляция выполняется попарно для идентификации корреляционного пика. Положение во времени корреляционного пика, учитывая преднамеренно заданный сдвиг, соответствует разности времени между моментами прихода сигналов между космическим аппаратом 6 и каждой одной из пары принимающих станций 4 и, таким образом, также для разности расстояний между космическим аппаратом 6 и каждой одной из пары принимающих станций 4.
Способ не требует знаний фактического расстояния между принимающей станцией 4 и космическим аппаратом 6 в качестве входных данных для процесса оценки положения. Способ не требует знаний ни какой-либо информации, касающейся времени передачи сигналов от космического аппарата 6, ни какой-либо информации, касающейся природы сигналов, переданных от космического аппарата 6, в качестве входных данных для процесса оценки положения.
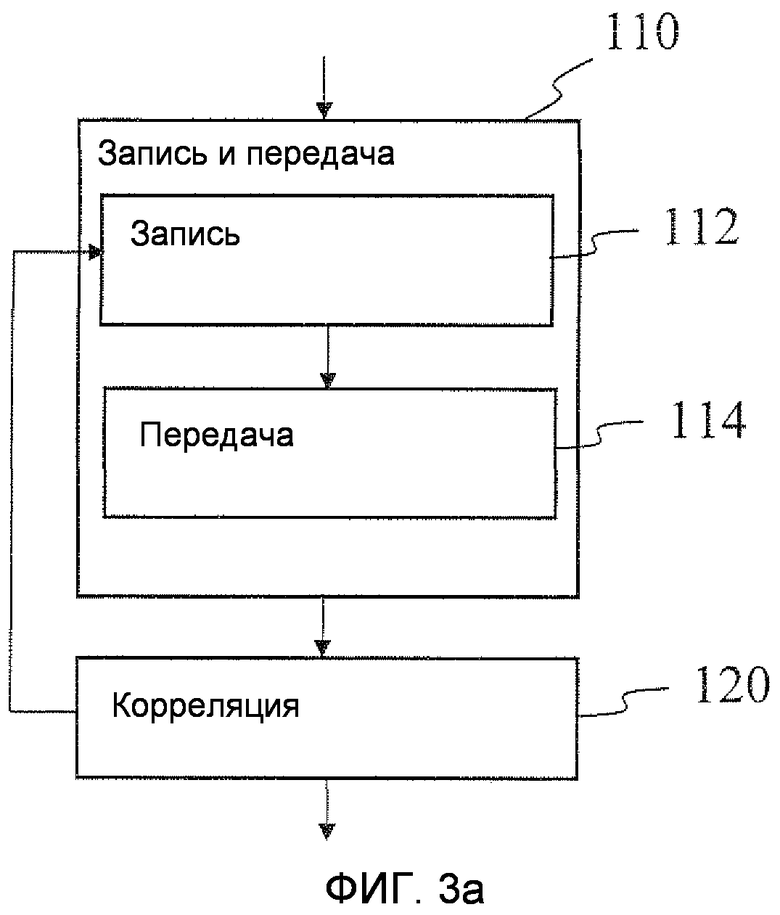
Фиг.3а иллюстрирует способ согласно одному варианту осуществления изобретения. Он отличается от способа фиг.2 тем, что в качестве результата процедуры 120 корреляции получают не только информацию о положении космического аппарата и/или о разностях в расстоянии между космическим аппаратом и множеством принимающих станций, а также команды нового сдвига и/или размера окна вычисляются и отправляются от обрабатывающей станции 2 в принимающие станции 4. Следовательно, сдвиг между окнами записи, ассоциированными с двумя принимающими станциями 4, и/или размер окон записи вычисляется на основе информации о положении космического аппарата 6 (и известном положении двух принимающих станций 4).
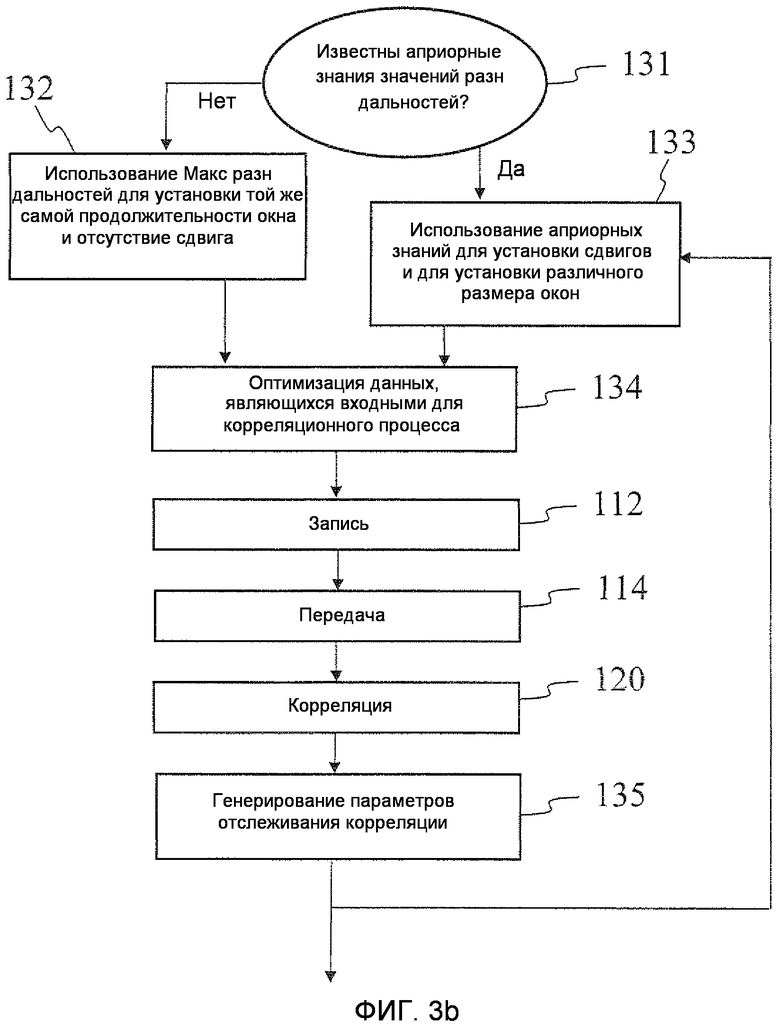
Временной сдвиг окон 8 записи и установка их размера далее будут объяснены со ссылкой на фиг.3b в контексте способа согласно другому варианту осуществления, включающему в себя отслеживание положения. Сдвиг и параметры размеров итерационно адаптируются. Фиг.3b показывает контур обратной связи и иллюстрирует новейшие этапы осуществления сдвига, установки размера (т.е. установки размера индивидуальных окон) и отслеживания.
Далее давайте рассмотрим две принимающие станции 4a, 4b и их соответствующие окна 84a, 84b записи. Размеры окон 84a, 84b записи могут быть оба установлены так, чтобы быть достаточно большими, чтобы покрывать максимальную разность дальностей, ассоциированную с каждой одной из принимающих станций 4a, 4b (упомянутую дальность, указываемую ссылкой в материалах настоящей заявки как "Макс разн A-B дальностей") плюс издержка. Разность Макс разн A-B дальностей равна наземному расстоянию по базовой линии между принимающими станциями 4a и 4b. Если используется больше принимающих станций 4a, 4b, 4c, 4d, размер окна должен учесть наибольшую разность дальностей, например Макс разн C-D дальностей. Если априорные сведения о значениях разности дальностей не известны 131 ("Нет"), может быть использована установка 132 в качестве размера окон 84a, 84b, 84c, 84d записи той же самой Макс разн C-D дальностей как у начальных значений (но не на всем протяжении процесса отслеживания).
Априорное знание значений разности дальностей может быть извлечено из любого одного из или любого сочетания:
- прогнозов орбиты спутника (элементов Кеплера),
- информации долготы спутника, расположенного на геостационарной дуге,
- информации приблизительного положения (в ячейке пространства) спутника на геостационарной орбите,
- информации, извлеченной из любых (прошлых) измерений (например, наведения антенны),
- информации, извлеченной из прошлых корреляций (которые становятся априорным знанием в контексте текущей итерации).
Если априорные сведения о значениях разности дальностей известны 131 ("Да"), это может быть использовано для установки 133 размера окон 8 записи и временных сдвигов между окнами 8 записи. Если в распоряжении не имеется априорных сведений, сдвиг не устанавливается.
Затем может произойти оптимизация 134 входных данных для корреляционного процесса. Она может включать в себя:
а) масштабирование размера окна, ассоциированного с принимающей станцией 4а к минимуму, требуемому для получения достаточного корреляционного пика (имеющейся в распоряжении ширины полосы частот сигнала умноженной на время выборки или "BW*t product");
b) выбор размера окна, ассоциированного с принимающей станцией 4b, для соответствия точности прогноза разности дальностей, полученной на этапе 133.
Затем происходит запись 112, передача 114 и корреляция 120 последовательностей сигналов, записанных во время окна 84a и 84b записи. Корреляция 120 включает в себя детектирование положения корреляционного пика. Разность дальностей является суммой положения корреляционного пика и сдвига окна (если таковой имеется), как установлено на этапе 133.
Тогда может произойти генерация 135 параметров отслеживания корреляции. Как только положение пика найдено, размер окна 84b записи может быть уменьшен для удаления издержек, несущих не имеющее отношения к делу содержание для корреляции с окном 84a записи. Размер окна 84b записи может быть уменьшен до размера окна 84a. Однако предпочтительно сохранять некоторую границу для размера окна 84b записи, чтобы ввести поправку на перемещение космического аппарата или спутника с течением времени до последующей итерации записи. Разность дальностей, вычисленная на этапе 120, предоставляет значение обновленного параметра "сдвиг окна". Размер, вычисленный на этапе 135, предоставляет значение обновленного параметра "размер окна". Эти новые значения могут затем быть использованы в следующей итерации(ях) либо на том же самом наборе данных или на втором наборе данных, записанных позже во времени ("отслеживание"). Использование значений сгенерированных параметров на следующей итерации(ях) проиллюстрировано стрелкой, берущей начало внизу фиг.3b, за блоком 135, и ведущей к блоку 133.
Отслеживание может использовать одно предыдущее измерение или несколько предыдущих измерений, соответствующих нескольким итерациям.
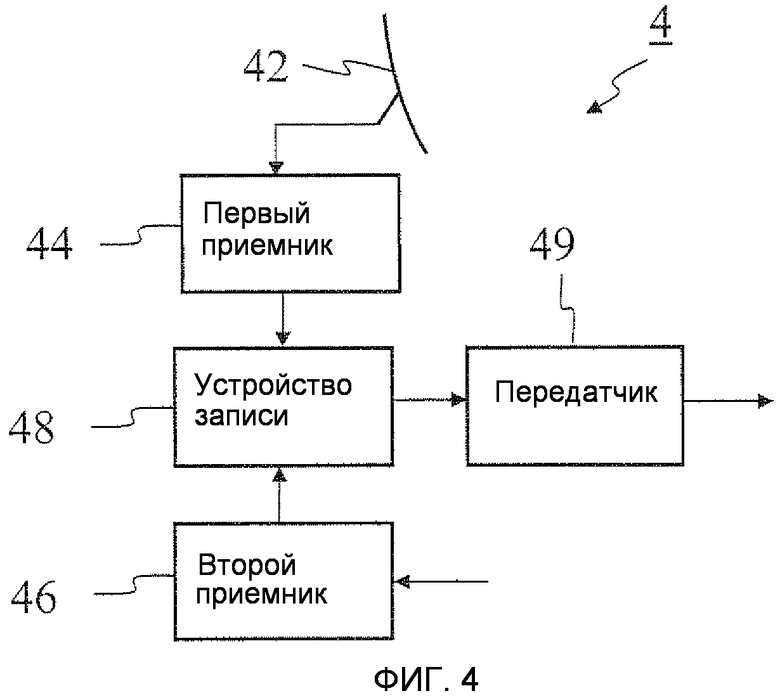
Фиг.4 иллюстрирует принимающую станцию 4 согласно одному варианту осуществления изобретения. Принимающая станция 4 участвует в оценке положения космического аппарата 6. Чтобы поступить таким образом, она взаимодействует с обрабатывающей станцией 2. Принимающая станция 4 включает в себя антенну 42 или блок 42 антенны, первый приемник 44 или блок 44 первого приемника, записывающее устройство 48 или блок 48 записывающего устройства и передатчик 49 или блок 49 передатчика и второй приемник 46 или блок 46 второго приемника.
Антенна 42 сконфигурирована для приема сигналов от космического аппарата 6, положение которого должно быть оценено. Антенна 42 соединена с первым приемником 44, выполненным с возможностью приема сигналов, переданных от космического аппарата 6 через антенну 42. Второй приемник 46 выполнен с возможностью приема от обрабатывающей станции 2 указания времени запуска (соответствующего временному сдвигу) в качестве инструкции для начала окна 8 записи и/или указания размера окна (соответствующего продолжительности) в качестве инструкции к размеру окна 8 записи. Записывающее устройство 48 выполнено с возможностью записи во время окна 8 записи, которое стартует в соответствии с указанием времени запуска и/или указанием размера окна, принятым от обрабатывающей станции 2, сигналов, переданных от космического аппарата 6. Записывающее устройство 48 может быть адаптировано для активации аналого-цифрового преобразователя в соответствии с указанием времени запуска, принятым от обрабатывающей станции 2 во время, указанное указанием времени запуска, с тем чтобы записывать сигнал во время окна 8 записи. Запуск аналого-цифрового преобразователя может быть выполнен на основе синхронизированного временного базиса (синхронизированного среди принимающих станций 4).
Передатчик 49 выполнен с возможностью передачи в обрабатывающую станцию 2 данных, представляющих записанные сигналы во время окна 8 записи.
Фиг.5 иллюстрирует обрабатывающую станцию 2 согласно одному варианту осуществления изобретения. Обрабатывающая станция 2 участвует в оценке положения космического аппарата 6. Чтобы поступить таким образом, она взаимодействует с принимающими станциями 4. Обрабатывающая станция 2 содержит передатчик 22 или блок 22 передатчика, приемник 24 или блок 24 приемника и коррелятор 26 или блок 26 коррелятора. Передатчик 22 выполнен с возможностью передачи в каждую из множества принимающих станций 4, выполненных с возможностью принимать сигналы, переданные от космического аппарата 6, указания времени запуска, относящегося к началу окна 8 записи, и/или указания размера окна в качестве инструкции к размеру окна 8 записи. Другими словами, указание времени запуска является инструкцией в принимающую станцию 4 для начала записи сигналов, принятых от космического аппарата 6. Указание размера окна является инструкцией в принимающую станцию 4 для записи сигналов, принятых от космического аппарата 6 во время размера окна. Размер окна 8 записи может быть значением по умолчанию, установленным в пределах принимающих станций 4 (например, в пределах блока памяти) или может быть отправлен обрабатывающей станцией 2 в качестве инструкции в принимающие станции 4. Размер окна записи может быть также адаптирован, чтобы учитывать априорное знание положения космического аппарата 6.
Приемник 24 выполнен с возможностью приема от каждой из множества принимающих станций 4 данных, представляющих записанные сигналы, переданные от космического аппарата 6 во время окна 8 записи. Окно 8 записи, ассоциированное с каждой из принимающих станций 4, выполнено с возможностью быть сдвинутым и/или иметь другой размер по отношению друг к другу. Коррелятор 26 выполнен с возможностью корреляции записанных сигналов для оценки положения космического аппарата 6. Оценка положения космического аппарата выполняется коррелятором 26 в соответствии с вышеописанным способом трехмерного гиперболического позиционирования.
Вычислитель 28 сдвига и/или размера или блок 28 вычислителя сдвига и/или размера предоставлен для вычисления сдвигов и/или размеров окон, ассоциированных с окнами 8 записи, каждой из принимающих станций 4 на основе положения космического аппарата и/или на разностях расстояния между космическим аппаратом и множеством принимающих станций, вычисленных используя информацию, полученную от коррелятора 26.
Дополнительные преимущества, предоставленные вариантами осуществления изобретения включают в себя:
- отсутствие потребности измерений двухсторонней задержки и отсутствие потребности для любых структур нисходящей линии связи с выделенными сигналами измерения дальности;
- отсутствие знаний, требуемых для состояний нисходящей линии связи (линии от принимающих станций к космическому аппарату 6) по отношению к согласованию во времени, нагрузке, организации очереди, доступу и т.д.;
- отсутствие временной отметки переданных сигналов, требуемой блоком передачи спутника;
- отсутствие декодирования и демодулирования, требуемого на принимающих станциях, таким образом, уменьшая задержки, привнесенные принимающими станциями 4, перед ассоциированием записанной последовательности с информацией о согласовании во времени и отправкой записанных сигналов в обрабатывающую станцию 2 (преобразование с понижением частоты и аналого-цифровое (A/D) преобразование может быть однако осуществлено).
Далее, обращаясь к фиг.6, будут дополнительно объяснены проблемы, ассоциированные с размером окна 8 записи. Фиг.6 показывает значения разностей дальностей и дрейф в реальной системе (выборки проиллюстрированы; это объясняет прерывающийся характер данных). Система включает в себя четыре принимающих станции 4 (обозначенных здесь A, B, C и D), которые записывают и осуществляют отметку по времени общего сигнала, переданного в широковещательном режиме геостационарным спутником.
Корреляционный процесс использует окна записи, во время которых принимающие станции 4 отбирают входящие сигналы. Возможно использование единственного, общего окна записи для всех принимающих станций и, следовательно, задание общего начального времени записи и общего размера записи (продолжительности). Однако использование единственного общего окна записи для спутниковой системы генерирует ограничения реализации по причине времен распространения сигнала между спутником и наземной станцией (расстояние для прохождения сигнала в две стороны приблизительно 77000 км, двухсторонняя задержка приблизительно 258 миллисекунд). Ограничения реализации включают в себя различные дрейфы частоты во время времени записи, вызванном эффектом Доплера (вызывающего искажение, которое должно быть облегчено, перед корреляцией), и высокое количество отобранных данных, которые должны быть переданы в центральную обрабатывающую станцию. Использование единственного, общего окна записи является, следовательно, неудовлетворительным.
Для иллюстрации проблемы и решения, предлагаемого изобретением, здесь представлен числовой пример, основанный на реальных собранных данных:
- спутник расположен на 19.2E на геостационарной дуге;
- четыре принимающие станции рассредоточены в Европе на 3000 километровой базовой линии (Люксембург, Стокгольм, Рим и Мадрид) под паневропейским лучом спутника;
- 48-часовое время наблюдения.
В примере единственное общее окно записи для всех принимающих станций привело бы приблизительно к 2400 километрам плюс 10=процентной границе надежности, требуя окно записи длиной 9 миллисекунд. Использование сдвинутых окон для каждой принимающей станции дает возможность уменьшить это требуемое время записи для каждой станции и, таким образом, внешние воздействия.
Со ссылкой на фиг.7a и 7b будут дополнительно объяснены сдвинутые окна и местоположение и размер окон записи. Фиг.7а показывает график разности дальностей между принимающими станциями B и С (в примере в случае высоких суточных изменений) на протяжении 48 часов. Оценка средней "Ср(В-С)" разности дальностей определяет сдвиг между окнами записи принимающих станций B и С. Поскольку суточный шаблон может быть идентифицирован из перемещения спутника (и из B-C уравнения разности дальностей), размер окон записи должен быть определен для того, чтобы покрывать суточное изменение уравнения в окружности среднего положения.
Фиг.7b показывает окна записи для принимающих станций B и С, сдвиг, соответствующий Ср(B-C) и размер окна. Размер окна извлекается из:
Размер окна = max(суточное изменение, граница оценки положения) + граница записи.
Суточное изменение для этого примера равно 3,9 километрам. Граница оценки положения должна покрывать возможность того, что спутник выходит за пределы прогноза суточного изменения (например, маневр, другие орбиты, чем геостационарная). В этом примере для двух конкретных принимающих станций (B и C) может быть показано геометрически, что передвижение спутника в 200-километровой кубической ячейке пространства на геостационарной арке вызывает максимальную разность дальностей в 20 километров между принимающими станциями B и С. Должна быть установлена дополнительная граница надежной записи для гарантии достаточного перекрытия сигналов между общей частью переданного спутником сигнала для обоих окон. Минимальное число выборок для устранения ложных корреляционных пиков оценивается в 200 выборок (4 миллисекунды на частоте выборки 50 МГц) для сигнала полосы пропускания 25 МГц. Размер окна равен тогда

Со ссылкой на фиг.8 дополнительно будет пояснено отслеживание. Способ согласно одному варианту осуществления изобретения включает в себя процесс отслеживания изменений в положении спутника и в разности дальностей для пары принимающих станций, например принимающих станций B и С. Для каждой итерации корреляции окон B и С записи корреляционный процесс выводит пик на конкретном "смещении во времени", которое первым образом используется для вычисления местоположения спутника. Второстепенно эти "смещения во времени" являются входами для отслеживающей системы, которая определяет прогноз следующего положения и, следовательно, следующего сдвига между окнами записи, ассоциированными с принимающими станциями В и С.
Обновление сдвига окна при каждой итерации максимизирует количество перекрывающегося сигнала между окнами записи. Таким образом, может быть уменьшен размер окон записи. Диаграммы фиг.8 показывают для иллюстративной цели простейший прогноз экстраполяцией первого порядка.
В заключение, без прямой ссылки к любым чертежам преимущества отслеживания, включающие в себя в особенности уменьшение размера окна записи для систем реального времени, могут быть дополнительно объяснены, как следует ниже. Наличие точного краткосрочного прогноза разности задержки, основанное на последних измерениях, имеет преимущество в том, что размер окон записи более не должен покрывать суточный шаблон и может, следовательно, быть уменьшен. Такое уменьшение оптимизирует количество данных, которые должны быть переданы по сети в центральную обрабатывающую станцию для удовлетворения потребностей системы реального времени.
Уменьшенное окно записи должно позволять отслеживать изменения уравнения разности дальностей в секунду согласно ежесекундному базису. Следовательно, в дополнение к минимальному числу (представленному символом "#" в уравнении ниже) выборок, требуемых, чтобы избежать неоднозначности сигнала и ложных корреляций (т.е. 200 выборок или 4 миллисекунды на частоте выборки 50 МГц для сигнала полосы пропускания 25 МГц), размер окна записи должен включать в себя границу ошибки в оценке нового положения.
Размер окна записи = # выборок чтобы избежать неоднозначности (200) + граница ошибки оценки.
Равносильность между ошибкой в оценке нового положения и числом дополнительных выборок, требуемых для ее покрытия, вычисляется, предполагая частоту (fs) записи 50 МГц и в наихудшем случае ошибки в оценке 1 метра:

=> размер окна = 202 выборки = 1,21 км.
Как показано ниже в Таблице 1, отслеживающая система согласно изобретению может уменьшать влияние внешних факторов и скоростей данных с показателем 2000 в сравнении с системой, основанной на уникальном окне.
Производительности технологий
окно
*Одно и то же окно записи на каждую принимающую станцию (например, B) может быть применено во всех уравнениях (например, A-B, B-C).
Там, где в материалах настоящей заявки используется термин "блок" (например, в случае блока 42 антенны, блока 44 первого приемника, блока 48 записывающего устройства, блока 49 передачи, блока 46 второго приемника, блока 22 передачи, блока 24 приема, блока 26 корреляции, блока 28 вычислителя сдвига и/или размера), не делается ограничений в отношении того, как могут быть распределены составляющие элементы блока. Т.е. составляющие элементы блока могут быть распределены по различному программному обеспечению, или компонентам аппаратных средств, или устройствам для осуществления предназначенной функции. Более того, некоторые из блоков могут быть собраны вместе для выполнения их функций посредством объединенного единственного блока.
Вышеупомянутые блоки могут быть реализованы, используя аппаратные средства, программное обеспечение, комбинацию аппаратных средств и программного обеспечения, предварительно запрограммированные ASICS (специализированные интегральные схемы) и т.д. Блок может включать в себя блок компьютерной обработки (CPU), блок запоминающего устройства, блоки ввода/вывода (I/O), блоки сетевого соединения и т.д.
Хотя настоящее изобретение было описано на основе подробных примеров, подробные примеры только служат для предоставления специалистам в данной области техники лучшего понимания, а не предназначены для ограничения объема изобретения. Объем изобретения значительно лучше задан прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ УМЕНЬШЕНИЯ НЕОДНОЗНАЧНОСТЕЙ В ПРИНИМАЕМЫХ СИГНАЛАХ СПУТНИКОВОЙ СИСТЕМЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ (SPS) | 2007 |
|
RU2438146C2 |
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ УМЕНЬШЕНИЯ НЕОДНОЗНАЧНОСТЕЙ В ПРИНИМАЕМЫХ SPS-СИГНАЛАХ | 2011 |
|
RU2490666C2 |
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2007 |
|
RU2431866C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2615634C2 |
| Способ и устройство для обработки радионавигационных сигналов для атмосферного мониторинга | 2015 |
|
RU2680711C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ ОКНА ПОМОЩИ В УСТАНОВЛЕНИИ СИНХРОНИЗАЦИИ С СИГНАЛОМ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ | 2005 |
|
RU2382377C2 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ПОМОЩЬЮ ОДНОГО СПУТНИКА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2241239C2 |

Изобретение относится к области радиотехники, а именно к оценке положения космического аппарата (6), и может быть использовано, в частности, для оценки положения спутника, вращающегося вокруг Земли. Технический результат заключается в обеспечении отсутствия необходимости отправки шаблона опорного сигнала, излучения космическим аппаратом какой-либо последовательности запуска и необходимости адаптации космического аппарата и, таким образом, в улучшении оценки положения космического аппарата. Для этого система включает в себя принимающие станции (4) для приема сигналов, переданных от космического аппарата (6), и обрабатывающую станцию (2) для приема данных от принимающих станций (4), где каждая принимающая станция (4) записывает во время окна (8) записи сигналы, переданные от космического аппарата (6), и передает в обрабатывающую станцию (2) данные, представляющие упомянутые записанные, причем окна (8) записи, ассоциированные с каждой из принимающих станций (4), сдвинуты и/или имеют различный размер по отношению друг к другу. Обрабатывающая станция (2) коррелирует записанные сигналы для оценки разности расстояний между космическим аппаратом (6) и каждой из множества принимающих станций и для оценки положения космического аппарата (6). 5 н. и 17 з. п. ф-лы, 10 ил., 1 табл.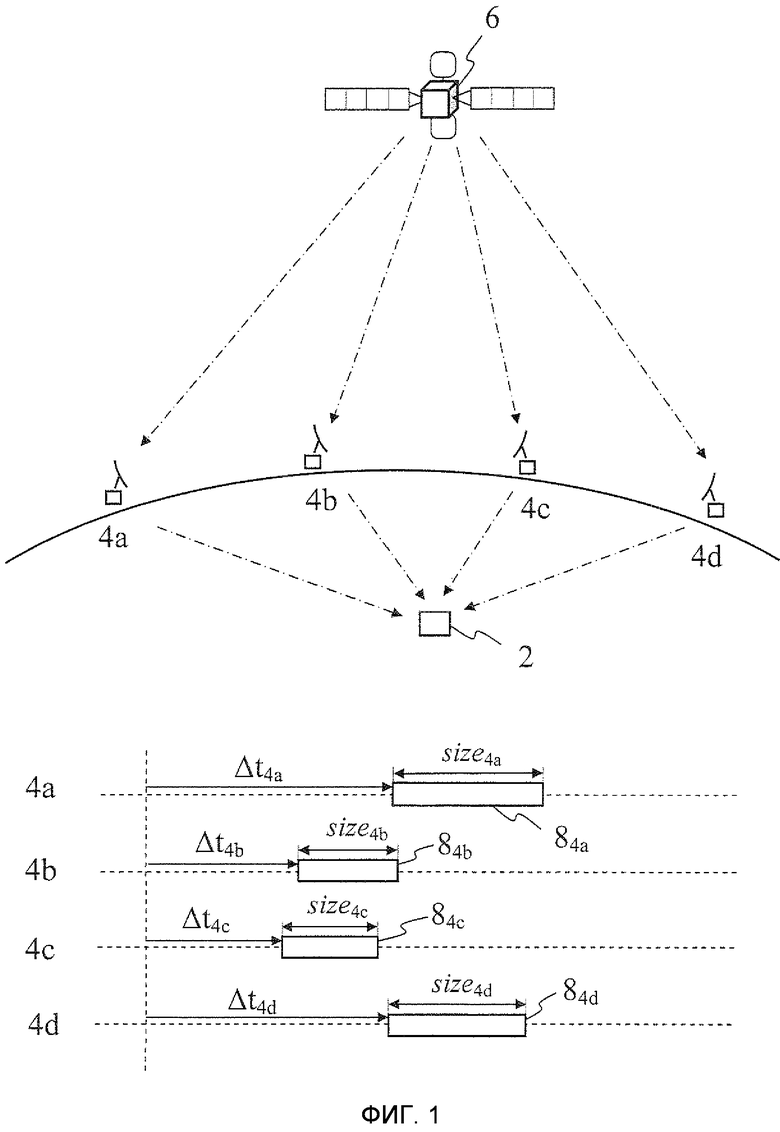
1. Система для оценки положения космического аппарата (6), включающая в себя:
множество принимающих станций (4), выполненных с возможностью принимать сигналы, переданные от космического аппарата (6); и
обрабатывающую станцию (2), выполненную с возможностью принимать данные от множества принимающих станций (4);
в которой
каждая из принимающих станций (4) выполнена с возможностью записывать во время временного окна (8), указываемого далее как окно (8) записи, сигналы, переданные от космического аппарата (6), и передавать в обрабатывающую станцию (2) данные, представляющие записанные сигналы во время окна (8) записи;
окна (8) записи, ассоциированные с каждой из принимающих станций (4), выполнены с возможностью быть сдвинутыми и/или иметь различный размер по отношению друг к другу; и
обрабатывающая станция (2) выполнена с возможностью коррелировать записанные сигналы для оценки для каждой, по меньшей мере, из одной пары среди множества принимающих станций (4) разности расстояний между космическим аппаратом (6) и каждой принимающей станцией (4) из пары и на основе этого положения космического аппарата (6).
2. Система по п.1, в которой сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи выполнен с возможностью быть вычисленным на основе
информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, и
положении двух принимающих станций (4).
3. Система по п.2, в которой сдвиг и/или размер выполнен с возможностью быть вычисленным обрабатывающей станцией (2).
4. Система по п.1 для оценки и отслеживания положения (6) космического аппарата, в которой сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи выполнен с возможностью быть вычисленным на основе или дополнительно на основе информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, как оценено обрабатывающей станцией (2).
5. Система по п.4, в которой сдвиг и/или размер выполнен с возможностью быть вычисленным между первой операцией записи и второй операцией записи на основе оцененного положения космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, извлеченной из первой операции записи.
6. Система по п.1, в которой, по меньшей мере, одна из принимающих станций (4) расположена вне зоны обслуживания нисходящей линии связи главного лепестка космического аппарата (6).
7. Система по любому одному из предшествующих пунктов, в которой каждое окно (8) записи имеет размер, находящийся между 4 микросекундами и 2 миллисекундами.
8. Способ оценки положения космического аппарата (6), использующий множество принимающих станций (4), выполненных с возможностью принимать сигналы, переданные от космического аппарата (6), и обрабатывающую станцию (2), выполненную с возможностью принимать данные от множества принимающих станций (4), причем способ включает в себя
процедуру (110) записи и передачи, включающую в себя запись (112) каждой из принимающих станций (4) во время временного окна (8), указываемого далее как окно (8) записи, сигналов, переданных от космического аппарата (6), и передачу (114) каждой из принимающих станций (4) в обрабатывающую станцию (2) данных, представляющих записанные сигналы во время окна (8) записи;
в котором окна (8) записи, ассоциированные с каждой из принимающих станций (4), сдвинуты и/или имеют различный размер по отношению друг к другу; и
процедуру (120) корреляции, включающую в себя корреляцию обрабатывающей станцией (2) записанных сигналов для оценки для каждой, по меньшей мере, из одной пары среди множества принимающих станций (4) разности расстояний между космическим аппаратом (6) и каждой принимающей станцией (4) из пары и на основе этого положения космического аппарата (6).
9. Способ по п.8, в котором сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи вычисляют на основе
информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, и
положении двух принимающих станций (4).
10. Способ по п.9, в котором сдвиг и/или размер вычисляют обрабатывающей станцией (2).
11. Способ по п.8 для оценки и отслеживания положения космического аппарата (6), в котором сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи вычисляют на основе или дополнительно на основе информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, как оценено обрабатывающей станцией (2).
12. Способ по п.11, в котором сдвиг и/или размер вычисляют между первой операцией записи и второй операцией записи на основе оцененного положения космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, извлеченной из первой операции записи.
13. Способ по п.8, в котором, по меньшей мере, одна из принимающих станций (4) расположена вне зоны обслуживания нисходящей линии связи главного лепестка космического аппарата (6).
14. Способ по любому одному из п.п.8-13, в котором каждое окно (8) записи имеет размер, находящийся между 4 микросекундами и 2 миллисекундами.
15. Принимающая станция (4) для участия в оценке положения космического аппарата (6), содержащая
первый приемник (44), выполненный с возможностью приема сигналов, переданных от космического аппарата (6);
второй приемник (46), выполненный с возможностью приема от обрабатывающей станции (2) указания времени запуска в качестве инструкции для начала временного окна (8) и/или указания размера окна в качестве инструкции для размера временного окна (8);
записывающее устройство (48), выполненное с возможностью записи во время временного окна (8), начатого согласно принятому указанию времени запуска и/или указанию размера окна, сигналов, переданных от космического аппарата (6), временного окна (8), указываемого далее как окно (8) записи; и
передатчик (49), выполненный с возможностью передачи в обрабатывающую станцию (2) данных, представляющих записанные сигналы во время окна (8) записи.
16. Принимающая станция (4) по п.15, расположенная вне зоны обслуживания нисходящей линии связи главного лепестка космического аппарата (6).
17. Обрабатывающая станция (2) для участия в оценке положения космического аппарата (6), содержащая
передатчик (22), выполненный с возможностью передачи в каждую из множества принимающих станций (4), выполненных с возможностью принимать сигналы, переданные от космического аппарата (6), указания времени запуска, ссылающегося на начало временного окна (8), указываемого выше как окно (8) записи, и/или указания размера окна в качестве инструкции к размеру окна (8) записи;
приемник (24), выполненный с возможностью приема от каждой из множества принимающих станций (4) данных, представляющих записанные сигналы, переданные от космического аппарата (6), во время окна (8) записи;
в котором окна (8) записи, ассоциированные с каждой из принимающих станций (4), выполнены с возможностью быть сдвинутыми и/или иметь различный размер по отношению друг к другу; и
коррелятор (26), выполненный с возможностью корреляции записанных сигналов для оценки для каждой из, по меньшей мере, одной пары среди множества принимающих станций (4) разности расстояний между космическим аппаратом (6) и каждой принимающей станцией (4) из пары и на основе этого положения космического аппарата (6).
18. Обрабатывающая станция (2) по п.17, в которой сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи выполнен с возможностью быть вычисленным обрабатывающей станцией (2) на основе
информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, и
положении двух принимающих станций (4).
19. Обрабатывающая станция (2) по п.17 или п.18 для оценки и отслеживания положения космического аппарата (6), в которой сдвиг между окнами (8) записи, ассоциированными с двумя принимающими станциями (4), и/или размер каждого из окон (8) записи выполнен с возможностью быть вычисленным обрабатывающей станцией (2) на основе или дополнительно на основе информации о положении космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, как оценено обрабатывающей станцией (2).
20. Обрабатывающая станция (2) по п.19, в которой сдвиг и/или размер выполнен с возможностью быть вычисленным между первой операцией записи и второй операцией записи на основе оцененного положения космического аппарата (6) и/или, по меньшей мере, одной разности расстояний, извлеченной из первой операции записи.
21. Обрабатывающая станция (2) по п.17, в которой каждое окно (8) записи имеет размер, находящийся между 4 микросекундами и 2 миллисекундами.
22. Машиночитаемый носитель, содержащий компьютерную программу, сконфигурированную, когда исполняется на принимающей станции (4) или на обрабатывающей станции (2), для осуществления соответственно конкретных процедур принимающей станции или конкретных процедур обрабатывающей станции способа согласно любому одному из п.п.8-14.
| US 2006227043 A1, 12.10.2006 | |||
| US 2008062043 A1, 13.03.2008 | |||
| US 2001051527 A1, 13.12.2001 | |||
| ВСПОМОГАТЕЛЬНАЯ ИДЕНТИФИКАЦИЯ ЛУЧА В СПУТНИКОВОЙ СИСТЕМЕ | 2002 |
|
RU2317643C2 |
| US 6047192 A, 04.04.2000 | |||
| US 5935196 A, 10.08.1999 | |||
| US 2004140930 A1, 22.07.2004 | |||
| US 2003086512 A1, 08.05.2003 | |||
| US 6104978 A, 15.08.2000. | |||

