ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение относится к системе загрузки изделия для военно-морского надводного боевого судна/корабля.
УРОВЕНЬ ТЕХНИКИ
[0002] Как правило, процесс запуска торпед с военно-морского судна/корабля можно классифицировать на подводные торпедные аппараты подводной лодки и палубные торпедные аппараты, установленные на палубной поверхности судов/кораблей. Торпедный аппарат представляет собой устройство цилиндрической формы, в которое торпеда загружается перед началом процесса пуска. Процедура загрузки торпеды для запуска торпед на подводной лодке предопределена из-за ее замкнутой среды и подводных ограничений. Процедура загрузки торпед в установленные на палубе надводные торпедные аппараты, открытые для атмосферы, является сложным процессом, зависящим от многих факторов, включая окружающие объекты и скорости крена/тангажа/рыскания судна/корабля.
[0003] В настоящее время в надводные палубные торпедные аппараты торпеды загружает гидравлический подъемный механизм с ручным управлением и минимум 8-10 человек личного состава. Ограничение пространства на надводном судне/корабле представляет собой ограничение такого процесса загрузки. Также, когда плавание происходит при среднем волнении существует ограничение по остойчивости из-за обстановки по крену и тангажу корабля/судна, и трудно загрузить торпеду в пусковую установку, не повредив ее внешнюю поверхность. Темп опытных пусков торпед в такой оперативной обстановке весьма низкий.
[0004] Вследствие этого, существует необходимость создания системы, которая бы устранила и преодолела одну или несколько из вышеназванных проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Это краткое изложение сущности изобретения представлено для ознакомления с концепциями, связанными с системой загрузки изделия. Это краткое изложение сущности не предназначено ни для определения существенных признаков настоящего изобретения, ни для использования при определении или ограничении объема настоящего изобретения.
[0006] Соответственно, аспект настоящего изобретения раскрывает систему загрузки изделия, содержащую нижнюю раму и верхнюю раму, соединенные множеством ножничных подъемных рычажных механизмов на ближнем конце и дальнем конце упомянутых нижней и верхней рам, причем каждый упомянутый ножничный подъемный рычажный механизм имеет поворотный первый рычаг и поворотный второй рычаг, каждый поворотный рычаг имеет первый конец и второй конец; первую опорную раму, которая имеет множество поворотных соединительных рычагов для соединения с упомянутым множеством ножничных подъемных рычажных механизмов, упомянутая первая опорная рама расположена между упомянутыми нижней и верхней рамами; ложемент для изделия, установленный на второй опорной раме, соединенной с упомянутой верхней рамой, упомянутый ложемент для изделия имеет множество разнонаправленных роликов, расположенных на противоположных сторонах упомянутого ложемента для изделия, каждый упомянутый оазнонаправленный ролик выполнен с возможностью линейного и вращательного перемещения упомянутого изделия; первый приводной узел, установленный на упомянутой первой опорной раме, выполненный с возможностью перемещения упомянутого ложемента для изделия, соединенного с упомянутым множеством ножничных подъемных рычажных механизмов и упомянутой верхней рамой, по продольной оси со степенью свободы перемещения вверх и вниз; второй приводной узел, соединенный с упомянутым ложементом для изделия, выполненный с возможностью аксиального перемещения по направлению оси подачи, перпендикулярной упомянутой продольной оси упомянутого первого приводного узла, со степенью свободы перемещения вперед и назад; и третий приводной узел, соединенный с упомянутым ложементом для изделия, выполненный с возможностью перемещения упомянутого ложемента для изделия вокруг оси углового наклона со степенью свободы перемещения с наклоном, каждый из упомянутых приводных злов выполнен с возможностью переключения упомянутой системы загрузки изделия, установленной на базовой/корабельной платформе, из убранного положения в выдвинутое рабочее положение, посредством этого стабилизируя перемещение упомянутого изделия и обеспечивая защиту внешней поверхности упомянутого изделия.
КРАТКОЕ ОПИСАНИЕ СОПРОВОДИТЕЛЬНЫХ ЧЕРТЕЖЕЙ
[0007] Вышеупомянутые и другие аспекты, отличительные признаки и преимущества определенных примеров вариантов осуществления настоящего изобретения будут более очевидны из нижеприведенного описания вместе с прилагаемыми чертежами, на которых:
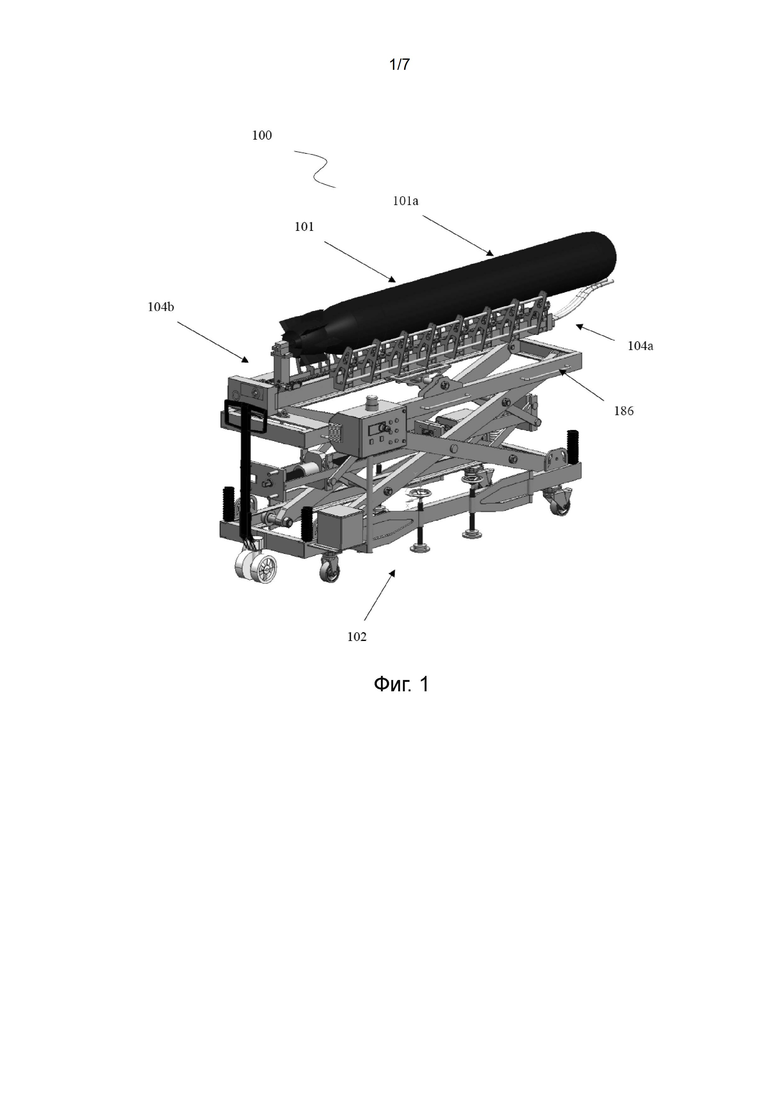
[0008] фиг. 1 показывает вид в изометрии на систему загрузки изделия в соответствии с аспектом настоящего изобретения,
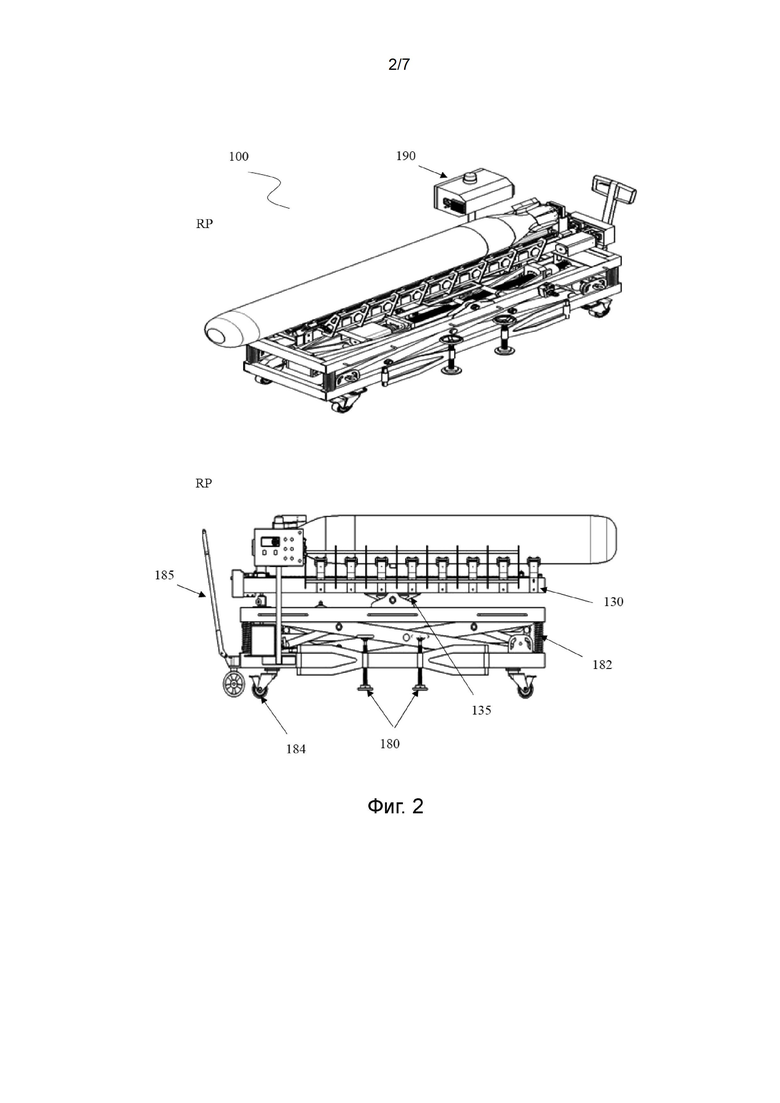
[0009] фиг. 2 показывает вид в изометрии и спереди системы загрузки изделия в убранном положении, согласно варианту осуществления настоящего изобретения,
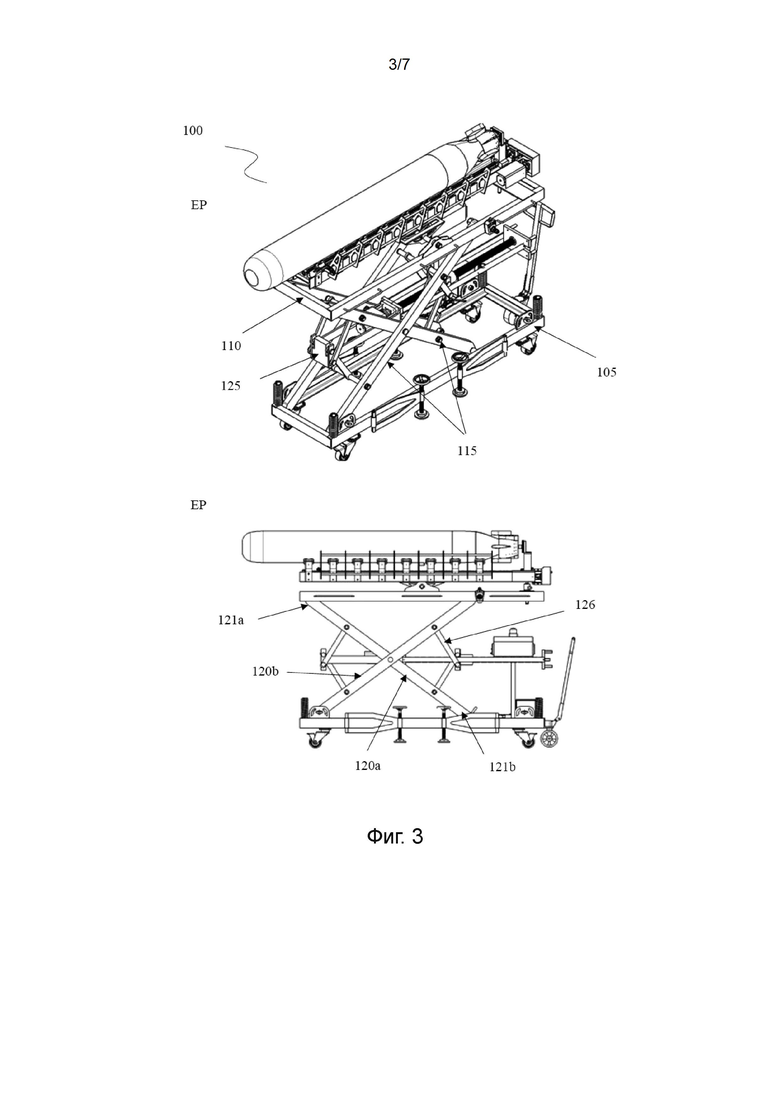
[0010] фиг. 3 показывает вид в изометрии и спереди системы загрузки изделия в выдвинутом рабочем положении, согласно варианту осуществления настоящего изобретения,
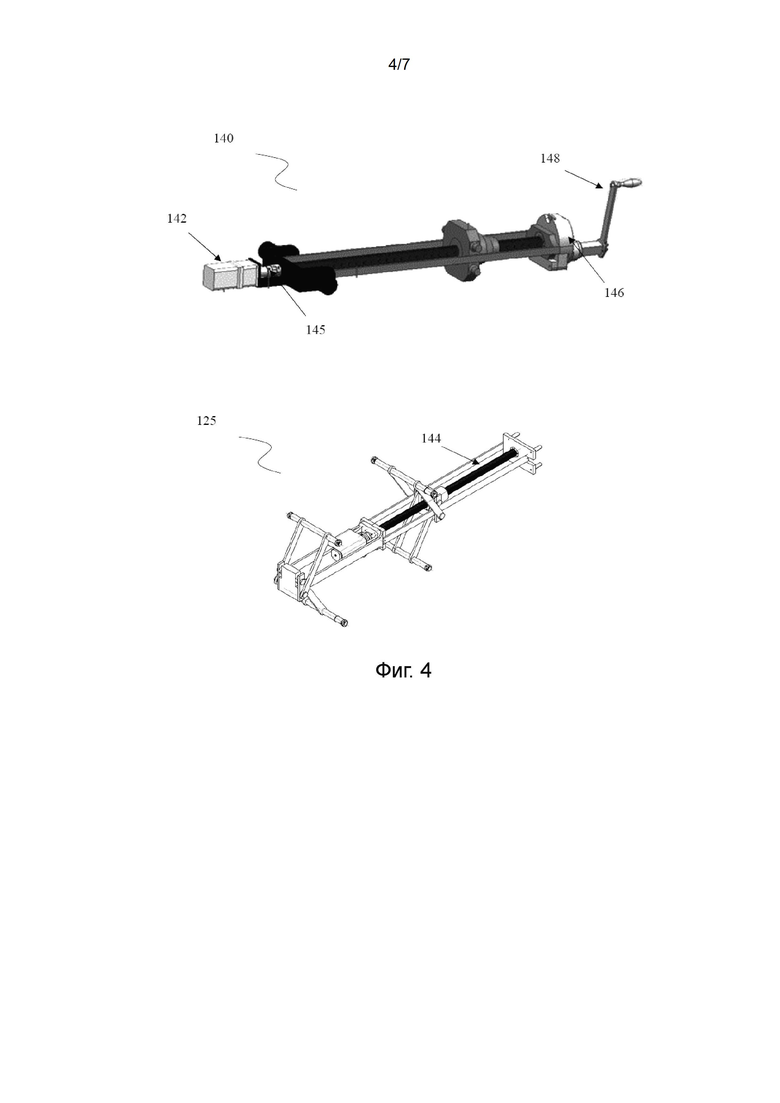
[0011] фиг. 4 показывает подробный вид первого приводного узла и первой опорной рамы, согласно варианту осуществления настоящего изобретения,
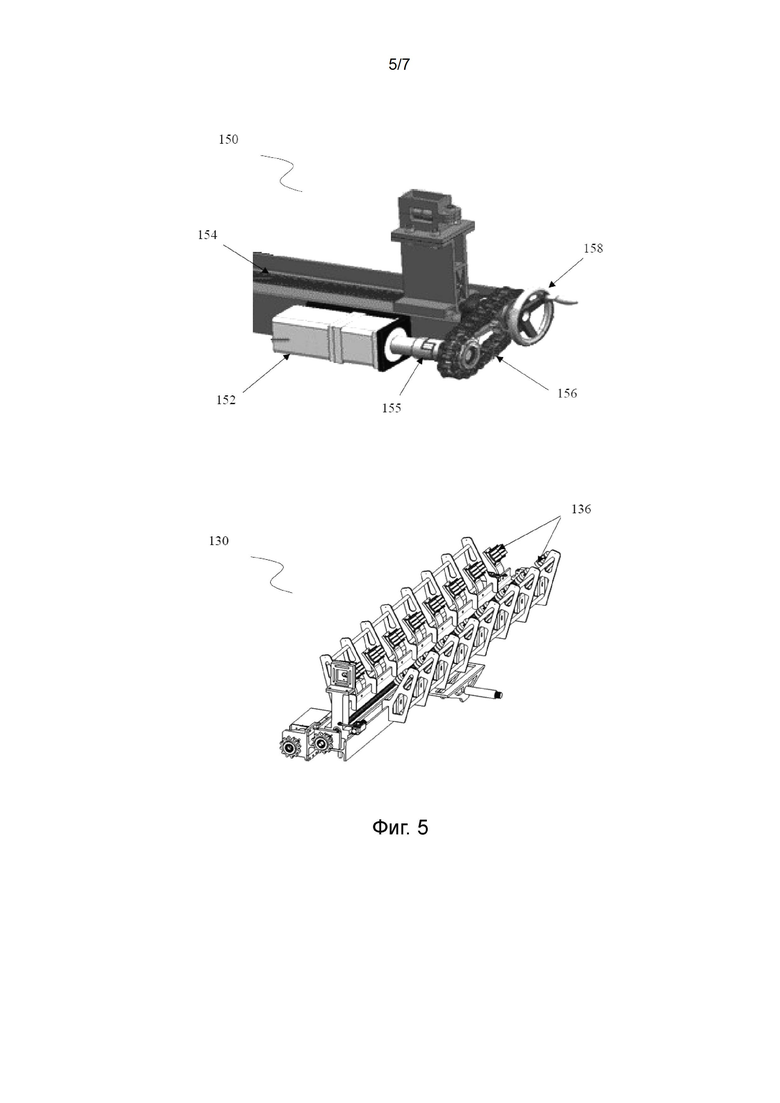
[0012] фиг. 5 показывает подробный вид второго приводного узла и ложемента для изделия, согласно варианту осуществления настоящего изобретения,
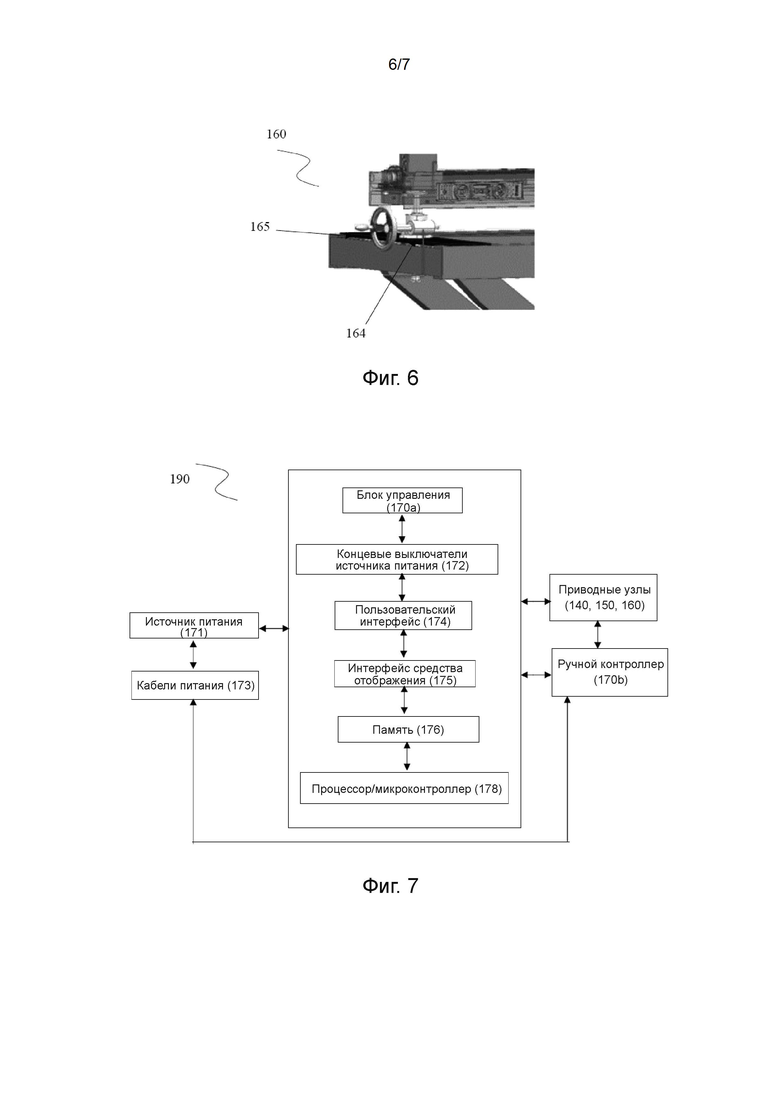
[0013] фиг. 6 показывает подробный вид третьего приводного узла, согласно варианту осуществления настоящего изобретения,
[0014] фиг. 7 показывает блок-схему блока управления, согласно варианту осуществления настоящего изобретения.
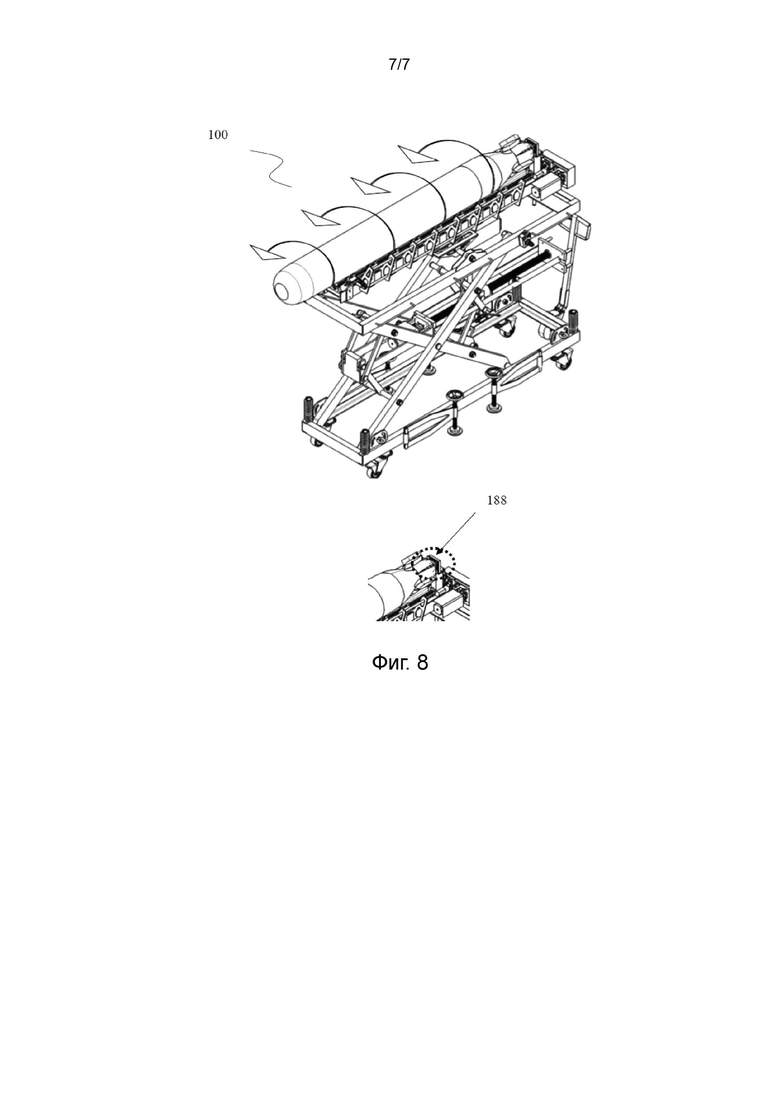
[0015] фиг. 8 показывает вид в изометрии на систему загрузки изделия, показывающий вращение или перекатывание изделия и множество возвратных пластин в соответствии с вариантом осуществления настоящего изобретения.
[0016] Специалисты в данной области техники поймут, что элементы на чертежах показаны для простоты и ясности понимания и могут быть изображены не в точном масштабе. Например, размеры некоторых элементов на чертеже могут быть увеличены относительно других элементов, чтобы улучшить понимание различных примеров вариантов осуществления изобретения по настоящему описанию.
[0017] Необходимо отметить, что на всех чертежах одинаковые цифровые обозначения используются для изображения одних и тех же или схожих элементов, признаков и конструкций.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0018] В следующем описании, с целью пояснения, изложены конкретные подробности, чтобы обеспечить понимание настоящего изобретения. Однако специалисту в данной области должно быть очевидно, что настоящее изобретение может быть реализовано без этих подробностей. Специалист сможет признать, что варианты осуществления настоящего изобретения, некоторые из которых описаны ниже, могут быть включены в некоторое количество систем.
[0019] В общем, в настоящем изобретении заявлена система загрузки изделия для военно-морского надводного боевого судна/корабля. Система загрузки изделия содержит нижнюю раму и верхнюю раму, соединенные множеством ножничных подъемных рычажных механизмов, первую опорную раму, расположенную между упомянутыми нижней и верхней рамами и соединенную с упомянутым множеством ножничных подъемных рычажных механизмов; ложемент для изделия, установленный на второй опорной раме, соединенной с упомянутой верхней рамой; множество приводных узлов, выполненных с возможностью перемещения упомянутого изделия, установленного на ложементе для изделия, с подвижностями перемещений вверх и вниз, вперед и назад и перемещения с наклоном, причем каждый из упомянутый приводной узел выполнен с возможностью переключения упомянутой системы загрузки изделия, установленной на базовой/корабельной платформе, из убранного положения в выдвинутое рабочее положение, и посредством этого стабилизация перемещение упомянутого изделия и обеспечивая защиту внешней поверхности упомянутого изделия. Система загрузки изделия управляется вручную или с помощью блока управления или портативного контроллера.
[0020] Другие аспекты, преимущества и отличительные признаки изобретения станут очевидными для специалистов в данной области из следующего подробного описания, которое, в сочетании с прилагаемыми чертежами, раскрывает примеры вариантов осуществления изобретения.
[0021] Термины и слова, используемые в нижеследующем описании и формуле изобретения, не ограничены библиографическими сведениями, а просто используются изобретателем для обеспечения ясного и полного понимания изобретения. Соответственно, специалистам в данной области должно быть очевидно, что нижеследующее описание примеров осуществления настоящего изобретения представлено только с целью иллюстрации, а не с целью ограничения изобретения, как определяется в приложенной формуле и ее эквивалентах. Специалист сможет разработать различные устройства, которые, хотя и не описаны здесь явно, воплощают принципы настоящего изобретения. Все термины и выражения в описании приведены только для целей понимания и никоим образом не ограничивают изобретение. Соответственно, специалисты в данной области признают, что различные изменения и модификации описанных здесь вариантов осуществления изобретения могут быть сделаны без отступления от объема и сущности изобретения. Кроме того, описания хорошо известных функций и конструкций опущены для ясности и лаконичности. Термины первый, второй, верхний, нижний, выше, ниже и т.п. используются для проведения различия между объектами, имеющими одинаковую терминологию, и никоим образом не предназначены для представления хронологического порядка, если явно не указывается иное. Кроме того, все приведенные здесь утверждения, излагающие принципы, аспекты и варианты осуществления изобретения, а также их конкретные примеры, предназначены для охвата их эквивалентов.
[0022] Соответствующие чертежи 1-8 показывают систему (100) загрузки изделия (101), внешнюю поверхность (101a) изделия, базовую/корабельную платформу (102), ближний конец (104a), дальний конец (104b), нижнюю раму (105), верхнюю раму (110), множество ножничных подъемных рычажных механизмов (115), поворотный первый рычаг (120a) и поворотный второй рычаг (120b), первый конец (121a), второй конец (121b), первую опорную раму (125), множество соединительных рычагов (126), ложемент (130) для изделия, вторую опорную раму (135), множество разнонаправленных роликов (136), первый приводной узел (140), биполярный шаговый двигатель с (142) с планетарной зубчатой передачей, линейный привод (144) c шариковой винтовой передачей, кулачковую муфту (145), лебедку (146), поворотную ручку (148), второй приводной узел (150), биполярный шаговый двигатель (152) с планетарной зубчатой передачей линейный привод (154) c шариковой винтовой передачей, кулачковую муфту (155), цепную передачу (156), первый маховик (158) ручной подачи, третий приводной узел (160), кубический винтовой домкрат (164) с червячной передачей, механический винтоверт (не показан), второй маховик (165) ручной подачи, динамометрический ключ (не показан), убранное положение (УП), выдвинутое рабочее положение (РП), блок управления (170a), ручной контроллер (170b), источник питания (171), множество концевых выключателей (172) источника питания, множество кабелей питания (173), пользовательский интерфейс (174), интерфейс средства отображения (175), память (176), процессор или микроконтроллер (178), панель управления (190), множество опор (180), множество элементов подвески (182), множество колес (184), буксировочная ручка (185), множество скоб для удержания пользователем (186), множество возвратных пластин (188).
[0023] На чертежах 1-3 показаны различные виды системы (100) для загрузки изделия в убранном положении (УП) и выдвинутом рабочем положении (РП). Изделие (101), далее называемое торпедой в качестве примера варианта осуществления изобретения, должно быть загружено в торпедный аппарат перед пуском с военно-морского надводного боевого судна/корабля. Система (100) для загрузки изделия может использоваться в качестве вспомогательного устройства для торпедного аппарата таким образом, что увеличивается темп опытных пусков, сокращается потребность в рабочей силе для выполнения процесса загрузки в торпедный аппарат, и обеспечивается защита внешней поверхности торпеды во время процесса загрузки.
[0024] Согласно варианту осуществления настоящего изобретения неограничивающие характеристики системы (100) для занрузки изделия включают в себя высоту подъема 1200 мм, максимальную грузоподъемность 450 кг, общую длину и ширину 2600×720 мм, минимальную высоту 620 мм и максимальную высоту 1620 мм от нижней рамы, имеющей C-образные каналы. В системе (100) содержится множество автоматических приводов, каждый из которых выполнен с шаговым двигателем, соединенным с соответствующими приводными узлами, которые помогают переводить упомянутую. систему из упомянутого убранного положения (УП) в упомянутое выдвинутое рабочее положение (РП). Первый шаговый двигатель выполнен для работы ножничного подъемника. Первый шаговый двигатель поднимает и опускает ножничный подъемник примерно с 0 мм до 1200 мм и обратно. Второй шаговый двигатель выполнен для линейного перемещения торпеды таким образом, что торпеда вводится в трубу торпедного аппарата. Шаговый двигатель обладает наибольшим крутящим моментом и минимальным угловым моментом 1,8 градусов. Применение шаговых двигателей также выгодно для того, чтобы избежать сложностей с феноменом частотно-регулируемого привода (ЧРП-привода), что значительно снижает общую стоимость системы. Третья степень свободы системы заключается в угловом перемещении/наклоне ложемента торпеды, которые настраиваются с помощью механического винтоверта. Не ограничиваясь сказанным, возможен максимальный наклон ложемента торпеды от 0 до ±2 градусов.
[0025] Согласно аспекту, настоящее изобретение раскрывает систему (100) для загрузки изделия, содержащую нижнюю раму (105) и верхнюю раму (110), соединенные множеством ножничных подъемных рычажных механизмов (115) на ближнем конце (104a) и дальнем конце (104b) упомянутых нижней (105) и верхней (110) рам. Каждое упомянутый ножничный подъемный рычажный механизм (115) имеет поворотный первый рычаг (120a) и поворотный второй рычаг (120b). Каждый поворотный рычаг (120a, 120b) имеет первый конец (121a) и второй конец (121b).
[0026] Согласно варианту осуществления изобретения, множество приводных узлов (140, 150, 160) выполнены для переключения упомянутой системы (100) загрузки изделия, установленной на базовой/корабельной платформе (102), из убранного положения (УП) в выдвинутое рабочее положение (РП), и посредством этого стабилизируя перемещение упомянутого изделия (101) и обеспечения защиты внешней поверхности (101а) упомянутого изделия (101).
[0027] Согласно варианту осуществления упомянутый первый конец (121a) или второй конец (121b) упомянутых поворотных первого (120a) и второго (120b) рычагов может скользить вдоль осевой плоскости внутри упомянутых нижней (105) и верхней (110) рам, когда упомянутая система (100) для перемещения изделия переходит из упомянутого убранного положения (УП) в упомянутое выдвинутое рабочее положение (РП).
[0028] Согласно варианту осуществления упомянутая нижняя рама (105) включает в себя множество опор (180), выполненных с возможностью раздвигаться примерно на 130 градусов для стабилизации перемещения упомянутого изделия (101) более чем на 25 градусов при условии наклона упомянутой базовой/корабельной платформы (102). Множество элементов подвески (182) расположены на упомянутой нижней раме (105) для восприятия поглощающей нагрузки изделия (101) в упомянутом убранном положении (УП). Множество роликов (184), буксировочная ручка (185) соединены с упомянутой нижней рамой (105), и множество рукояток (186) для удержания пользователем соединены с упомянутыми нижней рамой (105) и верхней рамой (110) для маневрирования и транспортировки системы (100) загрузки изделия.
[0029] Согласно настоящему изобретению система является прочной, и устойчивость системы (100) соответствует необходимым критериям по крену судна. Не ограничиваясь сказанным, для повышения устойчивости предусмотрены по меньшей мере 4 кронштейна/консоли (180). Согласно примеру осуществления изобретения, анализ устойчивости выполняется для системы (100) по оси тангажа, когда ножничный подъемник (115) находится в полностью поднятом состоянии с торпедой (101), размещенной на ложементе (130) для загрузки внутрь торпедного аппарата. Соответственно, основание/судовая платформа (102) системы наклоняется до 30 градусов, и расстояние по горизонтали измеряется от центра тяжести системы до конца кронштейна до тех пор, пока расстояние не уменьшится до нуля. Результаты показывают систему (100) с хорошей устойчивостью в критериях крена судна.
[0030] На фиг. 4, наряду с фигурами 1-3, показан подробный вид первого приводного узла (140) и первой опорной рамы (125) в соответствии с вариантом осуществления настоящего изобретения. Согласно варианту осуществления, первый приводной узел (140) установлен на упомянутой первой опорной раме (125), выполненной с возможностью перемещения упомянутого ложемента (130) для изделия, соединенного с упомянутым множеством ножничных подъемных рычажных механизмов (115) и упомянутой верхней рамой (110), вокруг продольной оси с возможностью перемещения в направлении вверх и вниз. Согласно варианту осуществления изобретения, упомянутая первая опорная рама (125) имеет множество поворотных соединительных рычагов (126) для соединения с упомянутым множеством ножничных подъемных рычажных механизмов (115), упомянутая первая опорная рама (125) расположена между упомянутыми нижней (105) и верхней (110) рамами.
[0031] Согласно варианту осуществления изобретения, в автоматическом режиме упомянутый первый приводной узел (140) включает в себя биполярный шаговый двигатель (142), с планетарной зубчатой передачей соединенный с линейным приводом (144) c шариковой винтовой передачей через взаимосвязанную кулачковую муфту (145) для передачи мощности и перемещения упомянутого ложемента изделия (130) с упомянутой возможностью перемещения вверх и вниз. В режиме ручного управления упомянутый первый приводной узел (140) включает в себя лебедку (146), имеющую поворотную рукоятку (148), соединенную с упомянутым линейным приводом (144) c шариковой винтовой передачей для ручного перемещения упомянутого ложемента для изделия (130) с упомянутой степенью свободы перемещения вверх и вниз, когда упомянутая кулачковая муфта (145) отсоединена от упомянутого линейного привода (144) с шариковой винтовой передачей.
[0032] Согласно варианту осуществления изобретения, шариковые винтовые пары бывают двух основных исполнений - вращающийся винт (S) и вращающаяся гайка (N). Вращение элементов шариковой винтовой передачи приводятся в действие за счет того, что двигатель вращает ходовой винт и передает нагрузку, которая приложена к гайке винтовой передачи. Движение достигается за счет работы двигателя и перемещения груза, прикрепленного к ходовому винту, или за счет вращения ходового винта и перемещения груза, прикрепленного к двигателю. Возможность движения вверх и вниз достигается с помощью штока ходового винта с шаговым двигателем мощностью 2 л.с. в сборе. Ножничный подъемник с упомянутым первым приводным узлом (140) в автоматическом режиме имеет прямой привод от вала двигателя (142) к штоку ведущего винта через кулачковую муфту (145). Всякий раз, когда двигатель работает на электрическом токе, рукоятка (148) ручной лебедки (146) демонтируется и хранится в наборе инструментов.
[0033] Согласно варианту осуществления изобретения, во время отключения питания, поскольку источник питания для системы (100) становится недоступен, система переводится в режим ручного управления. Специально изготовленная на заказ лебедка (146) крепится к концу шариковой винтовой передачи (144) с помощью крепежных элементов. При ослаблении крепежных элементов кулачковой муфты (145) передача мощности от двигателя (142) к штоку шарикового винта отключается. Поворотная ручка (148) крепится к лебедке (146) запрессовкой. Вращение ручки ручной лебедки (148) создает передачу мощности на стержень шариковой винтовой пары (144), это ручное вращательное движение стержня шариковой винтовой передачи реализует степень свободы перемещения ложемента для изделия (130) вверх и вниз. Таким образом, система управляется вручную, что обеспечивает простоту обращения с оборудованием и эффективную передачу мощности от двигателя к шариковой винтовой передаче. После завершения работы процесс монтажа и отсоединения выполняется в обратном порядке для регулярного использования системы (100) с источником питания.
[0034] На фиг. 5, наряду с фигурами 1-3, показан подробный вид второго приводного узла (150) согласно варианту осуществления настоящего изобретения. Согласно варианту осуществления изобретения, второй приводной узел (150) соединен с упомянутым ложементом (130) для изделия, выполненный с возможностью перемещения упомянутого изделия (101) вокруг оси осевой подачи, перпендикулярной упомянутой продольной оси упомянутого первого приводного узла (140), реализуя степень свободы перемещения вперед и назад. Согласно варианту осуществления изобретения ложемент (130) для изделия установлен на второй опорной раме (135), соединенной с упомянутой верхней рамой (110), причем упомянутый ложемент (130) для изделия имеет множество разнонаправленных роликов (136), расположенных на противоположных сторонах упомянутого ложемента (130) для изделия, каждый упомянутый разнонаправленный ролик (136) выполнен с возможностью линейного и вращательного перемещения упомянутого изделия (101). Соответственно, не ограничиваясь этим, для каждой стороны использовано 8 пар разнонаправленных роликов, и, следовательно, в общей сложности 16 роликов перемещают упомянутое изделие в ходе линейного движения.
[0035] Согласно варианту осуществления изобретения, в автоматическом режиме упомянутый второй приводной узел (150) включает в себя биполярный шаговый двигатель с планетарной зубчатой передачей (152), соединенный с линейным приводом с шариковой винтовой передачей (154) через взаимосвязанную кулачковую муфту (155), и цепную передачу (156) для передачи мощности и перемещения упомянутого изделия (101) с упомянутой степенью свободы перемещения вперед и назад. В режиме ручного управления упомянутый второй приводной узел (150) включает в себя первый маховик (158) ручной подачи, соединенный с упомянутым линейным приводом (154), с шариковой винтовой передачей для ручного перемещения упомянутого изделия (101) с упомянутой степенью свободы перемещения вперед и назад, когда упомянутая кулачковая муфта (155) отсоединена от упомянутого линейного привода (154) с шариковой винтовой передачей. Согласно настоящему изобретению, второй приводной узел в автоматическом режиме подачи питания имеет передачу мощности от двигателя (152) к штоку шариковой винтовой передачи через цепную передачу (156) путем сцепления кулачковой муфты с ведущей цепной звездочкой посредством затягивания и ослабления крепежных элементов кулачковой муфты. Выходной вал двигателя (152) соединен со звездочкой цепной передачи (156), а ходовой винт соединен со звездочкой ведомого зубчатого колеса. Когда двигатель работает на электрическом токе, первый маховик (158) ручной подачи, используемый для ведомого зубчатого колеса, демонтируется и хранится в наборе инструментов. Во время отключения питания ослабляются крепежные элементы кулачковой муфты (155), благодаря чему разъединяется соединение между двигателем (152) и штоком шариковой винтовой пары (154). При вращении бита с торцевой головкой, установленного на хвостовике шариковой винтовой передачи (154), с помощью гаечного ключа или первого маховика (158) ручной подачи, достигается вручную реализация степень свободы перемещения вперед и назад. После завершения работы процесс монтажа и отсоединения выполняется в обратном порядке для регулярного использования системы (100) с источником питания.
[0036] На фиг. 6 наряду с фигурами 1-3 показан подробный вид третьего приводного узла, согласно варианту осуществления настоящего изобретения. Согласно варианту осуществления изобретения, третий приводной узел (160) соединен с упомянутым ложементом (130) для изделия и выполнен со степенью свободы перемещения с наклоном упомянутого ложемента (130) для изделия вокруг оси с угловым наклоном. Согласно варианту осуществления, в автоматическом режиме третий приводной узел (160) включает в себя кубический винтовой домкрат (164) с червячной передачей, соединенный с механическим винтовертом и с упомянутым ложементом (130) для изделия для управления положением по углу наклона упомянутого ложемента (130) для изделия в пределах степени своды перемещения с наклоном примерно от 0 до ±2 градусов. В режиме ручного управления третий приводной узел (160) включает в себя второй маховик (165) ручной подачи или динамометрический ключ для соединения с упомянутым кубическим винтовым домкратом (164) с червячной передачей для ручного управления положением углового наклона упомянутого ложемента (130) для изделия c упомянутой степенью свободы. перемещения с наклонном, когда упомянутый механический винтоверт отсоединен от упомянутого кубического винтового домкрата (164) с червячной передачей.
[0037] Согласно варианту осуществления изобретения, кубический винтовой домкрат (164) с червячной передачей приводится в действие автоматическим переносным винтовертом (не показан), в любом случае, когда мощность винтового домкрата снижается, используется динамометрический ключ (не показан) или второй маховик (165) ручной подачи вместо автоматического переносного винтоверта. При отключении питания переносной винтоверт демонтируется c винтового домкрата, а два удлиненных бита устанавливаются в винтовой домкрат (164) с червячной передачей. Вращение бит с торцевыми головками с помощью динамометрического ключа или второго маховика (165) ручной подачи позволяет перемещать торпеду под углом или наклонно. Вращение второго маховика (165) ручной подачи по часовой стрелке и против часовой стрелки заставляет головку домкрата (164) перемещаться вверх и вниз, это заставляет ложемент для торпеды наклоняться на соответствующие градусы, что помогает выровнять ложемент (130) для торпеды для ее загрузки. После завершения операции, процесс монтажа и отсоединения выполняется в обратном порядке для регулярного использования системы (100) с автоматической переносным винтовертом.
[0038] На фиг. 7 приведена блок-схема панели управления (190) в соответствии с вариантом осуществления настоящего изобретения. Согласно варианту осуществления изобретения упомянутые первый (140), второй (150) и третий (160) приводные узлы имеют электрическую связь с блоком управления (170a), установленным обособленно (отдельно) от упомянутой системы (100) загрузки изделия, или с ручным контроллером (170b). Блок управления (170a) находится внутри панели управления (190). Работа обоих контроллеров (170a, 170b) является взаимоисключающей. Блок управления действует как главный узел для коммутации источника питания и электроники управления двигателем, ручной контроллер (170b) может управляться с расстояния 3 метров от системы (100), что предоставляет оператору возможность свободно перемещаться. Переключение между двумя контроллерами может осуществляться с помощью переключателя, предусмотренного на блоке управления (170 a). В любой момент активен только один контроллер.
[0039] Согласно варианту осуществления изобретения, упомянутый блок управления (170a) или ручной контроллер (170b) включает в себя пользовательский интерфейс (174), интерфейс средства отображения (175), память (176), процессор или микроконтроллер (178) и в режиме реального времени конфигурирован для: регулирования подачи питания от источника питания (171) к упомянутой системе (100) загрузки изделия; вызова сигнала, указывающего на начало работы; приведение в действие упомянутых приводных узлов (140, 150, 160) на основе входных сигналов командного управления, полученных от движения пальца пользователя или джойстика; инициирует сигнал включения/выключения, указывающий на выполнение переданных упомянутых командных управляющих сигналов на помянутые приводные узлы (140, 150, 160); инициирует сигнал включения/выключения, указывающий на сигналы обратной связи от упомянутых концевых выключателей (172) источника питания; и позволяет пользователю переключаться между упомянутым блоком управления (170a) или ручным контроллером (170b).
[0040] Согласно варианту осуществления изобретения, система (100) включает в себя в целом четыре концевых выключателя для ограничения перемещения вдоль горизонтальной и вертикальной осей, концевые выключатели (172) в нормальном состоянии работают в разомкнутом (NO) состоянии. Множество концевых выключателей (172) источника питания с возможностью определения и фиксации положения упомянутого изделия (101) упомянутыми первым (140), вторым (150) и третьим приводными узлами (160) в пределах предельного положения с упомянутыми степенями свободы перемещений вверх/вниз, вперед/назад и перемещению c угловым наклоном.
[0041] Согласно варианту осуществления, два биполярных шаговых двигателя используются для достижения вертикального и горизонтального перемещения полезной нагрузки. Биполярный шаговый двигатель имеет по одну обмотку на фазу статора. Двухфазный биполярный шаговый двигатель имеет 4 вывода. В биполярном шаговом двигателе общий вывод недоступен, как в однополярном шаговом двигателе. Следовательно, естественного изменения направления тока через обмотку не происходит. Биполярный шаговый двигатель имеет простую разводку проводов, но его эксплуатация не представляет особой сложности. Для приведения в действие биполярного шагового двигателя предусмотрена схема H-моста, следовательно, необходим отдельный приводной блок двигателя, чтобы им можно было управлять с помощью микроконтроллера или процессора.
[0042] Согласно примеру осуществления изобретения рабочим напряжением для шагового двигателя и каждого блока управления является постоянный ток напряжением 72 В, но источником питания, доступного на судне/корабле, является переменный ток напряжением 230 В, следовательно, предусмотрен трансформатор для преобразования 230 В переменного тока в 72 В постоянного тока, адаптированный к системе (100). В системе предусмотрены два выходных независимых порта, способных подавать 6 A, к каждому порту подключено по одному шаговому двигателю. Во время работы вращающаяся проблесковая лампа показывает, что блок управления (170a) “включен”, т.е. считывается, что блок управления готов к работе. Световые индикаторы, расположенные на панели блока управления (190), указывают, достигла ли система (100) крайнего положения и сработали ли верхние/нижние концевые выключатели. Аналогичным образом, на панели управления предусмотрены световые индикаторы для обозначения крайних значений и срабатывания концевых выключателей по горизонтальной оси. Панель блока управления (190) также включает в себя индикаторы и средства пользовательского ввода для переключения и информирования пользователя о том, осуществляется ли управление блоком управления (170a) или ручным контроллером (170b), и какой контроллер управляет двигателями. На блоке управления предусмотрен 2-осевой джойстик для управления перемещением вдоль горизонтальной и вертикальной осей. Джойстик включается только при нажатии клавиши переключения в самой верхней части джойстика. Панель блока управления (190) также включает в себя входной/пользовательский интерфейс (174) и выходной интерфейс средства отображения (175), в которых размещены различные кабели питания (173), соединяющие двигатели, концевые выключатели источника питания и т.д.
[0043] На фиг. 8 показан изометрический вид системы (100) для загрузки изделия, показывающий вращение или перекатывание изделия (101) и множество возвратных шайб (188) в соответствии с вариантом осуществления настоящего изобретения. В примере осуществления изделие (называемое торпедой) загружается в торпедный аппарат. Когда система (100) для загрузки изделия находится в полностью выдвинутом рабочем положении (РП), изделие (101) продвигается в торпедный аппарат с помощью второго (150) и третьего узлов (160) приводов. Перед загрузкой изделия в торпедный аппарат изделие помещается на ложемент для торпеды, разнонаправленные все колеса/ролики прокатываются поодиночке вручную, чтобы совместить ее зубец с пазом торпедного аппарата для безопасной установки изделия в торпедный аппарат. Это исходная точка, используемая для выравнивания изделия с торпедным аппаратом без нанесения царапин. На практике, если запуск торпеды отменяется по каким-либо причинам, изделие должно быть убрано, или несработавшее изделие должно быть извлечено из торпедного аппарата. Множество возвратных пластин (188) соединяются со вторым приводным узлом (150) для сборки с задней стороной (101) изделия, а затем система (100) поворачивается назад для безопасной посадки на разнонаправленные универсальные колеса/ролики ложемента торпеды. Значительно сокращаются время и усилия, затрачиваемые на ручную загрузку/выгрузку. Согласно варианту осуществления изобретения система (100) для загрузки изделия снабжена выравнивающими тележками (нижними колесами) (184), которые предназначены для перемещения системы (100) для загрузки изделия с изделием (101) из одного места в другое и для блокировки всей системы (100) во избежание дальнейшего движения.
[0044] Здесь описано и показано несколько вариантов осуществления системы загрузки изделия. Хотя были описаны конкретные варианты осуществления изобретения, не предполагается, что изобретение ограничивается ими, поскольку предполагается, что изобретение должно быть настолько широким по объему, насколько это позволяет уровень техники, и, следовательно, описание нужно воспринимать аналогичным образом. Тип материалов для компонентов и сами компоненты не ограничиваются теми, которые описаны выше. Кроме того, структура, способы соединения и выполнения системы и компонентов приведены только для справки и для понимания цели изобретения. Например, длина, ширина, высота, угловое перемещение, тип приводных узлов и механизмов не ограничены описанными выше и приведены только для справки и понимания цели изобретения. Необходимо понимать, что в вариантах осуществления изобретения могут быть использованы для изготовления материалы других типов, и, кроме того, структура и конструкция узла также могут соответственно варьироваться. Например, система имеет три различные степени свободы перемещений, все движения контролируются с помощью различных приводных механизмов, эти механизмы могут быть заменены, или для аналогичного вида движения и для достижения тех же степеней свободы перемещений могут быть использованы альтернативные механизмы, которые включают, но не ограничиваются гидравлическими системами, пневматическими системами, системами c ременным приводом, системами с цепным приводом, двигателями переменного/постоянного тока с соответствующей системой управления.
[0045] Необходимо понимать, что приведенное выше описание является иллюстративным, а не ограничивающим. Оно предназначено для охвата всех альтернатив, модификаций и эквивалентов, которые могут быть включены в суть и объем изобретения, как определено в приложенной формуле изобретения. Многие другие варианты осуществления должны быть очевидны для специалистов в данной области после ознакомления с приведенным выше описанием. Следовательно, объем изобретения следует определять со ссылкой на приложенную формулу изобретения, наряду с полным объемом эквивалентов, на которые предусматривается право этой формулой изобретения. В приложенной формуле изобретения термин “содержит” используется как английский эквивалент соответствующего термина “включает”, соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система камер для обработки имплантатов | 2025 |
|
RU2839087C1 |
| БЛОКИРОВКА ПУСТОЙ КАССЕТЫ С КЛИПСАМИ | 2013 |
|
RU2636861C2 |
| ВЗАИМОЗАМЕНЯЕМЫЙ КЛИПСОНАКЛАДЫВАТЕЛЬ | 2013 |
|
RU2636175C2 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВЛЕНИЯ КРУГЛОЙ ТРУБЫ | 2004 |
|
RU2316402C2 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ | 2006 |
|
RU2318174C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2017 |
|
RU2752456C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
Изобретение относится к системе загрузки изделия для военно-морского надводного боевого судна/корабля. Система (100) для загрузки изделия содержит нижнюю раму (105) и верхнюю раму (110), соединенные между собой множеством ножничных подъемных рычажных механизмов (115). Множество приводных узлов (140, 150, 160) выполнено для перемещения упомянутого изделия (101), установленного на упомянутом ложементе (130) изделия, с степенями свободы по перемещениям вверх и вниз, вперед и назад и с угловым наклоном. Каждый из упомянутых приводных узлов (140, 150, 160) выполнен для переключения упомянутой системы (100) загрузки изделия из убранного положения (УП) в выдвинутое рабочее положение (РП). Система загрузки изделия (100) управляется вручную или с помощью блока управления (170a) или ручного контроллера (170b). Достигается упрощение процесса погрузки изделий. 13 з.п. ф-лы, 8 ил.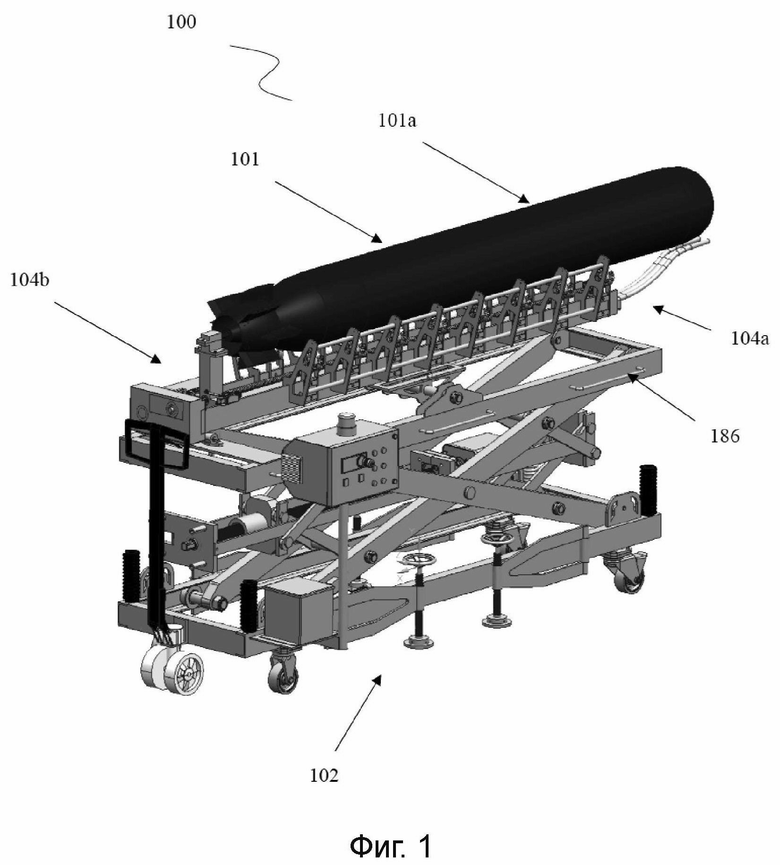
1. Система (100) загрузки изделия, содержащая
нижнюю раму (105) и верхнюю раму (110), соединенные множеством ножничных подъемных рычажных механизмов (115) на ближнем конце (104a) и дальнем конце (104b) упомянутых нижней (105) и верхней (110) рам, каждый упомянутый ножничный подъемный рычажный механизм (115) имеет поворотный первый рычаг (120a) и поворотный второй рычаг (120b), при этом каждый поворотный рычаг (120a, 120b) имеет первый конец (121a) и второй конец (121b),
первую опорную раму (125), имеющую множество поворотных соединительных рычагов (126) для соединения с упомянутым множеством ножничных подъемных рычажных механизмов (115), при этом упомянутая первая опорная рама (125) расположена между упомянутыми нижней (105) и верхней (110) рамами,
ложемент (130) для изделия, установленный на второй опорной раме (135), соединенной с упомянутой верхней рамой (110), причем упомянутый ложемент (130) для изделия имеет множество разнонаправленных роликов (136), расположенных на противоположных сторонах упомянутого ложемента (130) для изделия, причем каждый упомянутый разнонаправленный ролик (136) выполнен с возможностью линейного и вращательного перемещения упомянутого изделия (101),
первый приводной узел (140), установленный на упомянутой первой опорной раме (125), выполненный с возможностью перемещения упомянутой станины (130) для изделия, соединенной с упомянутым множеством ножничных подъемных рычажных механизмов (115) и упомянутой верхней рамой (110), по продольной оси со степенью свободы перемещения вверх и вниз;
второй приводной узел (150), соединенный с упомянутым ложементом (130) для изделия, выполненный с возможностью аксиального перемещения упомянутого изделия (101) по направлению оси подачи, перпендикулярной упомянутой продольной оси упомянутого первого приводного узла (140), со степенью свободы перемещения вперед и назад; и
третий приводной узел (160), соединенный с упомянутым ложементом (130) для изделия, выполненный с возможностью перемещения упомянутого ложемента (130) для изделия вокруг оси углового наклона со степенью свободы перемещения с наклоном,
каждый упомянутый приводной узел (140, 150, 160) выполнен с возможностью переключения упомянутой системы (100) загрузки изделия, установленной на платформе (102), из убранного положения (УП) в выдвинутое рабочее положение (РП), и посредством этого стабилизируя перемещение упомянутого изделия (101) и обеспечивая защиту внешней поверхности (101а) упомянутого изделия (101).
2. Система (100) для загрузки изделия по п. 1, в которой упомянутый первый приводной узел (140) включает в себя биполярный шаговый двигатель с планетарной зубчатой передачей (142), соединенный с линейным приводом (144) с шариковой винтовой передачей через взаимосвязанную кулачковую муфту (145) для передачи мощности и перемещения упомянутого ложемента (130) для изделия и с упомянутой степенью свободы перемещения вверх и вниз.
3. Система (100) для загрузки изделия по пп. 1, 2, в которой упомянутый второй приводной узел (150) включает в себя биполярный шаговый двигатель с планетарной зубчатой передачей (152), соединенный с линейным приводом (154) с шариковой винтовой передачей через взаимосвязанную кулачковую муфту (155), и цепную передачу (156) для передачи мощности и перемещения упомянутого изделия (101) с упомянутой степенью свободы перемещения вперед и назад.
4. Система (100) загрузки изделия по любому из пп. 1-3, в которой упомянутый третий приводной узел (160) включает в себя кубический винтовой домкрат (164) с червячной передачей, соединенный с механическим винтовертом и соединенный с упомянутым ложементом (130) для изделия для управления положением углового наклона упомянутого ложемента (130) для изделия со степенью свободы перемещения с наклоном примерно от 0 до ±2°.
5. Система (100) для загрузки изделия по любому из пп. 1-4, в которой упомянутые первый (140), второй (150) и третий (160) приводные узлы имеют электрическую связь с блоком управления (170a), установленным отдельно от упомянутой системы (100) для загрузки изделия, или с ручным контроллером (170b).
6. Система (100) для загрузки изделия по любому из пп. 1-5, в которой упомянутый первый конец (121a) или второй конец (121b) упомянутых первого (120a) и второго (120b) поворотных рычагов выполнен скользящим вдоль осевой плоскости внутри упомянутых нижней (105) и верхней (110) рам, когда упомянутая система (100) для загрузки изделия переключается из упомянутого убранного положения (УП) в упомянутое выдвинутое рабочее положение (РП).
7. Система (100) для загрузки изделия по любому из пп. 1-6, в которой упомянутый первый приводной узел (140) включает в себя лебедку (146), имеющую поворотную ручку (148), соединенную с упомянутым линейным приводом (144) с шариковой винтовой передачей для ручного перемещения упомянутого ложемента (130) для изделия в упомянутом направлении со степенью свободы перемещения вверх и вниз, когда упомянутая кулачковая муфта (145) отсоединена от упомянутого линейного привода (144) с шариковой винтовой передачей.
8. Система (100) для загрузки изделия по любому из пп. 1-7, в которой упомянутый второй приводной узел (150) включает первый маховик (158) ручной подачи, соединенный с упомянутым линейным приводом (154) с шариковой винтовой передачей для ручного перемещения упомянутого изделия (101) с упомянутой степенью свободы перемещения вперед и назад, когда упомянутая кулачковая муфта (155) отсоединена от упомянутого линейного привода (154) с шариковой винтовой передачей.
9. Система (100) для загрузки изделия по любому из пп. 1-8, в которой упомянутый третий приводной узел (160) включает в себя второй маховик (165) ручной подачи или динамометрический ключ для соединения с упомянутым кубическим винтовым домкратом (164) с червячной передачей для ручного управления положением угла наклона упомянутого ложемента (130) для изделия с упомянутой степенью свободы перемещения с наклоном, когда упомянутый механический винтоверт отсоединен от упомянутого кубического винтового домкрата (164) с червячной передачей.
10. Система (100) для загрузки изделия по любому из пп. 1-9, в которой множество концевых выключателей (172) источника питания выполнено для упомянутых первого (140), второго (150) и третьего (160) приводных узлов для определения и фиксации положения упомянутого изделия (101) в пределах порогового значения положения с упомянутыми степенями свободы перемещений вверх/вниз, вперед/назад и с угловым наклоном.
11. Система (100) для загрузки изделия по любому из пп. 1-10, в которой упомянутая нижняя рама (105) включает в себя множество опор (180), выполненных с возможностью разворота примерно на 130 градусов для стабилизации перемещения упомянутого изделия (101) при состоянии крена/тангажа упомянутой платформы (102) более чем на 25 градусов.
12. Система (100) для загрузки изделия по любому из пп. 1-11, в которой множество элементов подвески (182) расположено на упомянутой нижней раме (105) для приема и поглощения нагрузки от изделия (101) в упомянутом убранном положении (УП).
13. Система (100) для загрузки изделия по любому из пп. 1-12, в которой множество возвратных пластин (188) соединено с упомянутым вторым приводным узлом (150) для соединения с изделием (101) и перемещения назад упомянутого изделия на упомянутый ложемент (130) с помощью упомянутых роликов (136).
14. Система (100) для загрузки изделия по любому из пп. 1-13, в которой упомянутый блок управления (170a) или ручной контроллер (170b) включает в себя пользовательский интерфейс (174), интерфейс средства отображения (175), память (176), процессор или микроконтроллер (178) и в режиме реального времени настроен на
регулирование подачи питания от источника питания (171) к упомянутой системе (100) для загрузки изделия,
сигнал вызова, указывающий на начало работы,
приведение в действие упомянутых приводных узлов (140, 150, 160) на основе входных сигналов командного управления, полученных от движения пальца пользователя или джойстика,
инициирование сигнала включения/выключения, указывающего на выполнение переданных упомянутых командных управляющих сигналов упомянутыми приводными блоками (140, 150, 160);
инициирование сигнала включения/выключения, указывающего на сигналы обратной связи от упомянутых концевых выключателей источника питания (172); и
возможность пользователя переключаться между упомянутым блоком управления (170a) или ручным контроллером (170b).
| CN 109244903 A, 18.01.2019 | |||
| DE 102006006467 A1, 16.08.2007 | |||
| DE 0029616921 U1, 19.12.1996 | |||
| Подъемник | 1978 |
|
SU695960A1 |

