Изобретение относится к области точного приборостроения и может быть использовано при создании датчиков угловой скорости на основе волнового твердотельного гироскопа (ВТГ).
Известны способы повышения точности определения угловой скорости с использованием ВТГ на основе определения и последующей алгоритмической компенсации дрейфа ВТГ, заданного детерминированной математической моделью [Патент РФ №2480713 от 27.04.2013; Патент РФ №2619815 от 18.05.2017], или нелинейных искажений выходного сигнала ВТГ, описываемых сложной нелинейной детерминированной математической моделью [Патент РФ №2544308 от 20.05.2015]. Недостатком данных способов является сложность их аппаратной реализации и невозможность учета случайного характера дрейфа ВТГ.
Известны способы определения угловой скорости с использованием ВТГ на основе предварительного определения синфазных и квадратурных составляющих выходного сигнала ВТГ [Патент РФ №2526585 от 27.01.2014; Распопов В.Я. и др. Волновой твердотельный гироскоп с металлическим резонатором. Тула: Изд-во Тульского госуниверситета, 2018. - 189 с. - стр. 137] с использованием при вычислении их амплитуд сложных вычислительных алгоритмов в предположении статического характера ошибки измерения. Недостатком данных способов является сложность их вычислительной и аппаратной реализации и невозможность учета динамического широкополосного характера дрейфа ВТГ.
Наиболее близким по вычислительной и аппаратной реализации к предложенному способу является способ определения угловой скорости с использованием ВТГ, позволяющий определять угловую скорость вращения основания ВТГ как амплитуду гармонического сигнала, снимаемого с выходов чувствительных элементов ВТГ, пропорциональную искомой угловой скорости [Распопов В.Я. и др. Волновой твердотельный гироскоп с металлическим резонатором. Тула: Изд-во Тульского госуниверситета, 2018. - 189 с. - стр. 177]. Недостатком данного способа является невозможность учета динамического широкополосного характера дрейфа ВТГ.
Заявленное изобретение направлено на решение задачи повышения точности определения угловой скорости объекта с использованием ВТГ. Поставленная задача возникает при разработке датчиков угловой скорости на основе ВТГ для навигационных систем.
Для обеспечения высокой точности определения угловой скорости объекта с использованием ВТГ предлагается способ, заключающийся в том, что после измерения чувствительными элементами ВТГ деформации кромки резонатора путем сдвига полученного сигнала измерения на  формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется интегрируемая далее система дифференциальных уравнений оценки параметров движения кромки резонатора ВТГ в виде линейного фильтра Калмана, в котором в качестве наблюдателя вектора состояния используется сигнал измерения деформации кромки резонатора ВТГ, а выходом линейного фильтра Калмана является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений оценки амплитуды деформации кромки резонатора ВТГ.
формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется интегрируемая далее система дифференциальных уравнений оценки параметров движения кромки резонатора ВТГ в виде линейного фильтра Калмана, в котором в качестве наблюдателя вектора состояния используется сигнал измерения деформации кромки резонатора ВТГ, а выходом линейного фильтра Калмана является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений оценки амплитуды деформации кромки резонатора ВТГ.
Сущность способа состоит в следующем. При выполнении типичных для практики условий работы ВТГ:
- угловая скорость основания Ω намного меньше собственной частоты ω резонатора 
- угловая скорость основания постоянна 
- ускорение кромки резонатора, обусловленное действием элементов возбуждения, намного больше ускорения Кориолиса.
Уравнение движения кромки резонатора ВТГ в режиме чувствительности может быть записано следующим образом [Распопов В.Я. и др. Волновой твердотельный гироскоп с металлическим резонатором. Тула: Изд-во Тульского госуниверситета, 2018. - 189 с. - стр. 177]

где х - деформация кромки резонатора, ω - собственная частота резонатора, соответствующая второй форме колебаний, Q - добротность резонатора, Ω - угловая скорость основания, К - коэффициент Брайана (для второй формы колебаний равный 0,4),  ƒ, ν - амплитуда и частота ускорения, обусловленного действием элементов возбуждения.
ƒ, ν - амплитуда и частота ускорения, обусловленного действием элементов возбуждения.
Решением данного уравнения в установившемся режиме является временной сигнал, измеряемый чувствительными элементами (ЧЭ) ВТГ (например, пьезоэлементами):

Соответственно, с выхода ЧЭ ВТГ снимается измерительный сигнал, который с учетом неизбежных помех измерения ЧЭ и динамического широкополосного характера дрейфа ВТГ W может быть записан следующим образом:

Дрейф ВТГ W обусловлен, как правило, значительным числом равномощных случайных факторов (вариациями температуры, случайными перегрузками, флюктуациями питания, конструктивными погрешностями ЧЭ и др.), поэтому далее полагаем помеху W белым гауссовским шумом с нулевым средним и известной интенсивностью DW.
В силу того, что измеряемый сигнал х является высокодинамичным и традиционные методы статической обработки сигналов [Патенты РФ №2480713, 2619815, 2544308, 2526585 и др.] для его оценки по стохастическим измерениям (3) оказываются малоэффективными, используем далее методы стохастической оценки динамических сигналов, в частности, наиболее эффективный с точки зрения точности для линейного оцениваемого сигнала х линейный фильтр Калмана (ФК), обеспечивающий минимум среднеквадратической ошибки оценки. Но построение данного фильтра непосредственно с использованием уравнения (1), содержащего неизвестный параметр Ω в правой части, оказывается невозможным. В связи с этим для построения уравнений стохастической оценки сигнала х сформируем дополнительный сигнал x1, образованный сдвигом гармонического сигнала х на (например, за счет использования типовой фазосдвигающей цепи):
который далее подвергается зашумленному измерению:

где помеху измерения W1 в силу упомянутых ранее соображений полагаем белым гауссовским шумом с нулевым средним и известной интенсивностью DW1.
Из выражения сигнала измерения (4) может быть получено с точностью до постоянного множителя ν следующее представление правой части уравнения (1):
Подстановка полученного выражения в уравнение движения кромки резонатора в режиме чувствительности приводит к стохастическому дифференциальному уравнению, не содержащему параметрической неопределенности:
Для возможности дальнейшего использования методов стохастической фильтрации представим данное уравнение в векторной форме Ланжевена:

где х=х0,
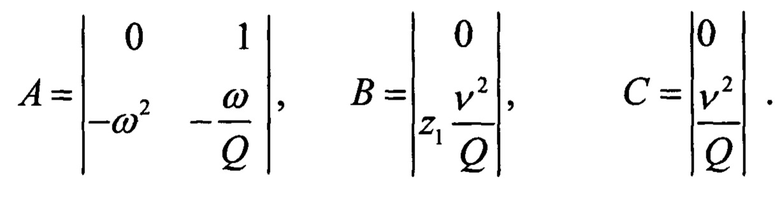
Выбирая в качестве сигнала наблюдения за координатой х=х0 сигнал измерения z, уравнение наблюдателя получаем в форме (3):
где H=|10|,
а соответствующий линейный ФК для оценки сигнала х=х0 - в виде:
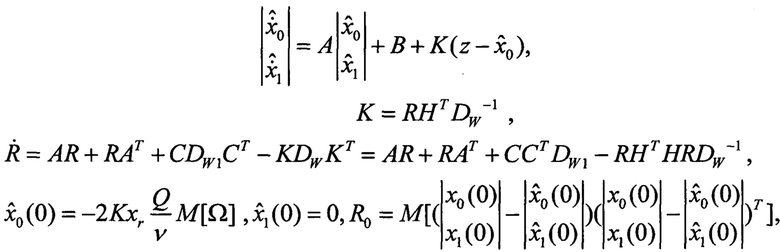
где  - оценки сигнала х и скорости его изменения, R - апостериорная ковариационная матрица.
- оценки сигнала х и скорости его изменения, R - апостериорная ковариационная матрица.
Выбор значения M[Ω] осуществляется, исходя из априорной информации о начальной скорости вращения основания ВТГ. После формирования оценки  сигнала x вычисление значения угловой скорости вращения основания ВТГ Ω=const осуществляется в соответствии с (2) делением значений
сигнала x вычисление значения угловой скорости вращения основания ВТГ Ω=const осуществляется в соответствии с (2) делением значений  на коэффициент
на коэффициент  в дискретные моменты времени
в дискретные моменты времени  i=1, 2, …, где k выбирается из соображений исключения ситуации деления на "0" - некратности значений vti 90° и 270° (например, k=0,349 рад (20°)). Т.к. в силу стохастичности оценки
i=1, 2, …, где k выбирается из соображений исключения ситуации деления на "0" - некратности значений vti 90° и 270° (например, k=0,349 рад (20°)). Т.к. в силу стохастичности оценки  все полученные значения Ωi будут иметь разброс, то далее для повышения точности определения угловой скорости производится текущее усреднение полученных значений Ωi:
все полученные значения Ωi будут иметь разброс, то далее для повышения точности определения угловой скорости производится текущее усреднение полученных значений Ωi:  Усредненное текущее значение
Усредненное текущее значение  является искомым значением угловой скорости вращения основания ВТГ.
является искомым значением угловой скорости вращения основания ВТГ.
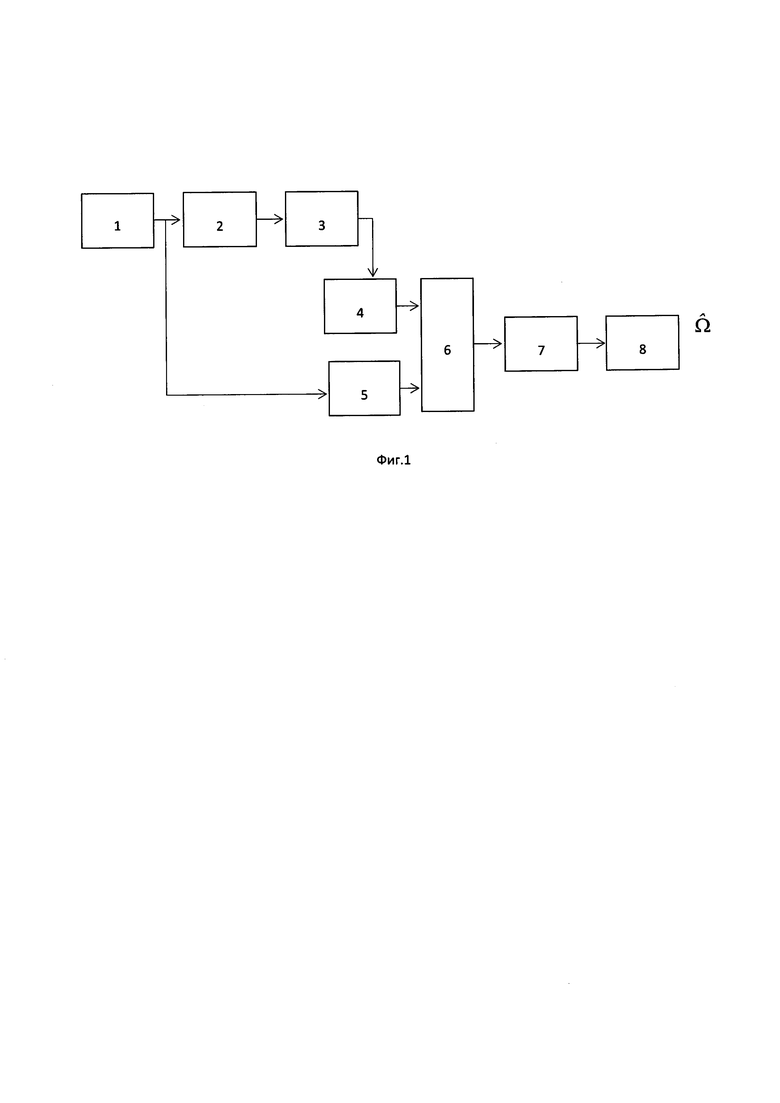
Таким образом, заявленный способ включает (фиг. 1):
- измерение чувствительными элементами ВТГ деформации кромки резонатора (сигнала х) - этап 1,
- формирование дополнительного сигнала x1путем сдвига сигнала х на  этап 2,
этап 2,
- измерение дополнительного сигнала x1 - этап 3,
- формирование уравнения движения кромки резонатора ВТГ в режиме чувствительности в векторной форме Ланжевена с использованием измерения дополнительного сигнала x1 - этап 4,
- формирование сигнала наблюдения за движением кромки резонатора ВТГ на основе сигнала измерения координаты х - этап 5,
- оценка амплитуды деформации кромки резонатора ВТГ (сигнал  ) на основе линейного ФК - этап 6,
) на основе линейного ФК - этап 6,
- вычисление в дискретные моменты времени текущих значении Ωi на основе полученной оценки сигнала  пропорциональной Ωi - этап 7,
пропорциональной Ωi - этап 7,
- усреднение текущих дискретных значений Ωi и формирование искомого значения угловой скорости вращения основания ВТГ как результата данного усреднения - этап 8.
Таким образом, повышается точность определения угловой скорости основания ВТГ за счет использования при вычислении ее значения оценки амплитуды кромки резонатора ВТГ, оптимальной в среднеквадратическом, что, в свою очередь, обеспечивает минимум среднеквадратической ошибки определения самой угловой скорости основания ВТГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ С ИСПОЛЬЗОВАНИЕМ ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2020 |
|
RU2750428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2013 |
|
RU2544308C9 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| Способ измерения угловой скорости с помощью волнового твердотельного гироскопа | 2020 |
|
RU2738824C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАКТИЧЕСКОЙ ЧАСТОТЫ КОЛЕБАНИЙ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2022 |
|
RU2785080C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
Изобретение относится к области точного приборостроения и может быть использовано при создании датчиков угловой скорости на основе волнового твердотельного гироскопа (ВТГ). Сущностью заявленного решения является то, что при определении угловой скорости после измерения чувствительными элементами ВТГ деформации кромки резонатора путем сдвига полученного сигнала измерения на  формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется фильтр Калмана, выходом которого является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений. Техническим результатом при реализации заявленного решения выступает повышение точности определения угловой скорости объекта с использованием ВТГ. Поставленная задача возникает при разработке датчиков угловой скорости на основе ВТГ для навигационных систем. 1 ил.
формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется фильтр Калмана, выходом которого является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений. Техническим результатом при реализации заявленного решения выступает повышение точности определения угловой скорости объекта с использованием ВТГ. Поставленная задача возникает при разработке датчиков угловой скорости на основе ВТГ для навигационных систем. 1 ил.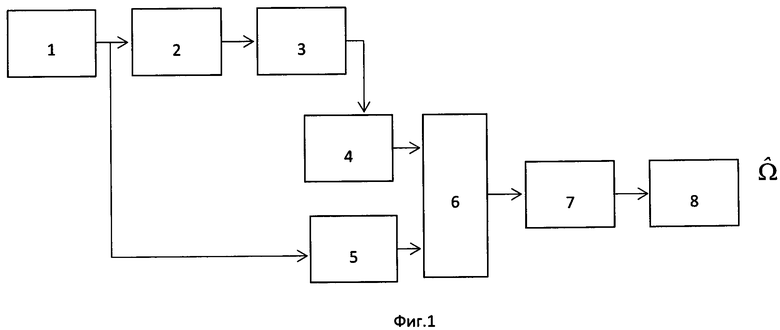
Способ определения угловой скорости с использованием волноводного твердотельного гироскопа (ВТГ), заключающийся в том, что после измерения чувствительными элементами ВТГ деформации кромки резонатора путем сдвига полученного сигнала измерения на  формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется интегрируемая далее система дифференциальных уравнений оценки параметров движения кромки резонатора ВТГ в виде линейного фильтра Калмана, в котором в качестве наблюдателя вектора состояния используется сигнал измерения деформации кромки резонатора ВТГ, а выходом линейного фильтра Калмана является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений оценки амплитуды деформации кромки резонатора ВТГ.
формируется дополнительный сигнал, на основе измерения которого и уравнения движения кромки резонатора ВТГ в режиме чувствительности реализуется интегрируемая далее система дифференциальных уравнений оценки параметров движения кромки резонатора ВТГ в виде линейного фильтра Калмана, в котором в качестве наблюдателя вектора состояния используется сигнал измерения деформации кромки резонатора ВТГ, а выходом линейного фильтра Калмана является оптимальная в среднеквадратическом оценка амплитуды деформации кромки резонатора ВТГ, пропорциональная угловой скорости основания ВТГ и масштабируемая для ее определения в дискретные моменты времени с последующим формированием искомого значения угловой скорости как результата усреднения промасштабированных значений оценки амплитуды деформации кромки резонатора ВТГ.
| ТРЕЛЕВОЧНАЯ МАШИНА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИДЕРЕВЬЕВ | 0 |
|
SU163835A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2013 |
|
RU2544308C9 |
| Диссертация: "ВЛИЯНИЕ НЕЛИНЕЙНЫХ СВОЙСТВ ЭЛЕКТРОСТАТИЧЕСКИХ И ЭЛЕКТРОМАГНИТНЫХ ДАТЧИКОВ УПРАВЛЕНИЯ НА ДИНАМИКУ ЦИЛИНДРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА", 2019 | |||
| Статья: "ВЛИЯНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА НА ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТВЕРДОТЕЛЬНОГО | |||

