Техническое решение относится к весоизмерительной технике и может быть использовано для взвешивания транспортного средства (груженого, порожнего, дорожного, карьерного автотранспорта и др.) целиком и/или поосного взвешивания, а также для взвешивания крупногабаритных грузов.
Известны автомобильные весы (RU 133292, МПК G01G 19/02, опубл. 10.10.2013), содержащие два параллельных ряда попарно расположенных весовоспринимающих платформ, расположенные между каждой парой весовоспринимающих платформ и по их внешним торцам соединительные платформы, весоизмерительные датчики, размещенные между фундаментом и соединительными платформами, в них введены стягивающие узлы, соединительные платформы выполнены в виде двутавровых балок, продольные оси которых перпендикулярны продольным осям весовоспринимающих платформ, а торцы весовоспринимающих платформ прижаты к стенкам двутавровых балок стягивающими узлами.
Недостатком известного технического решения является отсутствие возможности определения нагрузок на оси.
Известен способ автоматического взвешивания автомобилей в статике и движении, включающий их перемещение по платформенным весам, измерение быстродействующим АЦП и запоминание кодов нагрузок, определение съездов и наездов осей, отличающийся тем, что идентифицируют прохождение осей и мостов, измерение веса автомобиля начинают при фиксации одной из осевых формул автомобиля: 1+1, 1+2 или 2+2, прекращают в статике по команде компьютера «конец измерения», формируемой по достижению заданного числа упомянутых кодов, при этом сигналы о начале и конце взвешивания в статике передают водителю с помощью светофора, а в движении - по первому съезду после начала измерения с платформенных тензовесов оси автомобиля или наезду первой оси прицепа или полуприцепа.
К недостаткам известного способа относится использование в конструкции блоков идентификации автомобилей, соответствующих длине мостов взвешиваемых автомобилей, для определения осевой формулы автомобиля или установка платформ со сдвигом левой и правой колеи, при чем длина сдвига соответствует длине мостов взвешиваемых автомобилей, что усложняет процесс изготовления и сборки.
Известно устройство для статического взвешивания автотранспортного средства (АТС) (RU 2584715, МПК G01G 19/02, опубл. 20.05.2016), содержащее платформенные весы, предназначенные для установки на них упомянутого АТС колесами всех его осей; комплект из подкладных весов, каждые из которых предназначены для размещения на упомянутых платформенных весах под всеми колесами каждой оси из выбранной совокупности из одной или более осей упомянутого АТС; вычислительное средство, выполненное с возможностью принимать показания упомянутых платформенных весов и упомянутых подкладных весов и определять нагрузку от упомянутой выбранной совокупности осей суммированием показаний всех упомянутых подкладных весов и определять суммарную нагрузку от остальных осей упомянутого АТС как разность между показаниями упомянутых платформенных весов и суммой показаний упомянутых подкладных весов.
Недостатком известного технического решения является использование для определения (измерения) нагрузок на оси дополнительных конструктивных элементов в виде комплекта из подкладных весов, так как платформенные весы определяют только полную массу транспортного средства, что усложняет процесс взвешивания.
Техническим результатом является повышение технологичности, точности измерений, расширение функциональных возможностей весов, размер грузоприемной платформы которых позволяет разместить одновременно все оси транспортного средства, для определения нагрузок на оси транспортного средства.
Технический результат достигается тем, что весы для определения нагрузок на оси транспортного средства, включающие грузоприемную платформу, размер которой позволяет разместить одновременно все оси транспортного средства, весоизмерительные датчики, закрепленные в узлах встройки, соединенные как минимум с одним аналого-цифровым преобразователем, позволяющим передавать на устройство с микропроцессором данные по каждому весоизмерительному датчику, преобразованные из аналогового сигнала в цифровые значения с частотой дискретизации, позволяющей устройству с микропроцессором производить расчет нагрузок на оси, устройство с микропроцессором выполнено с возможностью:
- приема и обработки данных с каждого нагруженного датчика при заезде осей транспортного средства на грузоприемную платформу и/или проезде, и/или при остановке, и/или при съезде с нее осей транспортного средства;
- расчета нагрузки на каждую ось с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса
и/или
- расчета нагрузки на каждую ось с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных при последовательном съезде осей транспортного средства с грузоприемной платформы.
Устройство с микропроцессором в том числе может быть выполнено с возможностью расчета массы транспортного средства с учетом данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса или с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных при последовательном съезде осей транспортного средства с грузоприемной платформы; хранения и/или передачи, и/или отображения полученных данных и/или результатов взвешивания.
Частота дискретизации (выборки цифровых значений) аналого-цифрового преобразователя составляет не менее 1000 Гц.
Грузоприемная платформа может быть выполнена в виде одной или нескольких секций. Грузоприемная платформа в виде одной секции имеет узлы для опоры на весоизмерительные датчики, в виде нескольких секций имеет узлы для опоры на весоизмерительные датчики, в месте стыковки секций выполненные общими и/или раздельными.
Сущность заявленного технического решения поясняется чертежами.
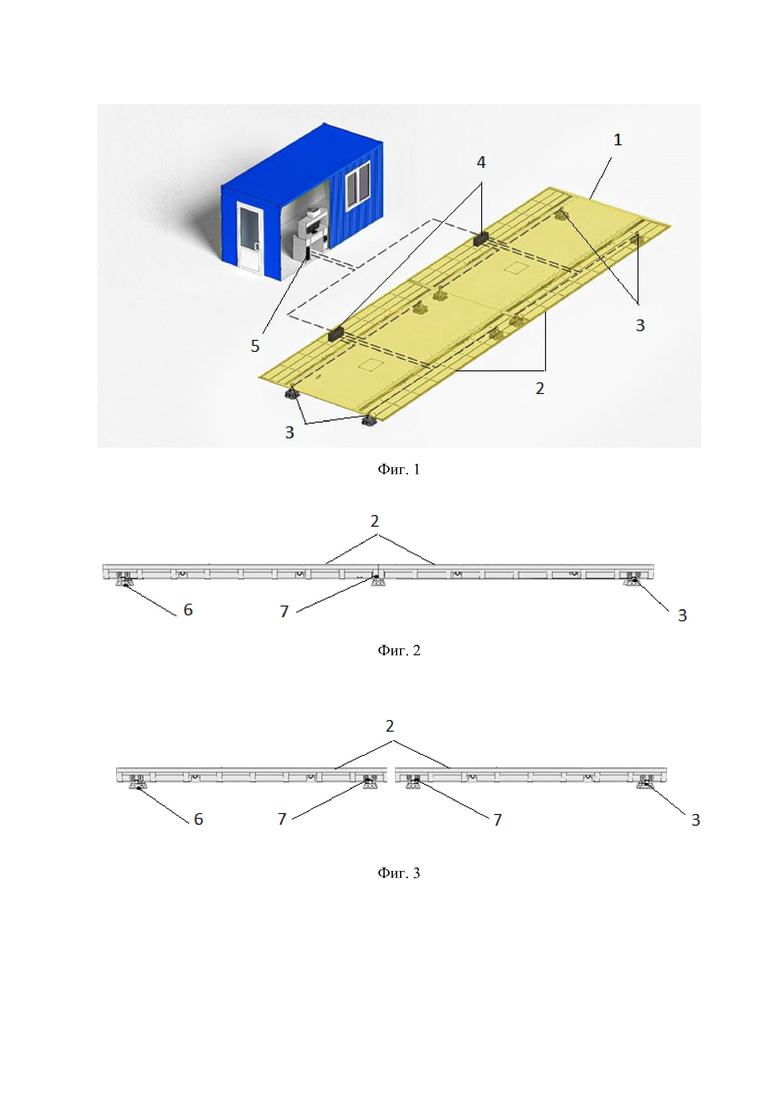
На фиг. 1 представлена схема весов для определения нагрузок на оси транспортного средства.
На фиг. 2 представлена платформа, состоящая из двух секций, имеющих в месте соединения общие узлы для опоры на весоизмерительные датчики.
На фиг. 3 представлена платформа, состоящая из двух секций, имеющих в месте стыковки раздельные узлы для опоры на весоизмерительные датчики.
Весы для определения нагрузок на оси транспортного средства (фиг. 1) содержат грузоприемную платформу 1, имеющую одну или несколько секций 2 в зависимости от размера транспортного средства, которые могут быть соединены между собой в месте стыковки секций 2, выполненных, например, в виде опорной металлической рамы с настилом из листовой стали. Каждая секция 2 опирается на весоизмерительные датчики 3. В зависимости от вида и количества секций 2 при количестве двух, трех секций 2 и более соседние секции 2 могут иметь как общие (фиг. 2), так и раздельные узлы 7 (фиг. 3) для опоры на весоизмерительные датчики 3. Секции 2 устанавливают на единый железобетонный фундамент или на опорную металлическую раму на одном уровне с поверхностью дорожного полотна или над ним. В случае установки секции 2 на фундамент или раму, расположенную над уровнем дорожного полотна, для плавного заезда на платформу 1 (секцию) и съезда с нее транспортного средства устанавливают подъездные пути. Установка нескольких секций 2 позволяет взвешивать различные типы транспортных средств, в том числе грузовые транспортные средства совместно с прицепами. Образуется зона взвешивания для проведения измерений (испытаний) с размером грузоприемной платформы 1, позволяющей размещать одновременно все оси транспортного средства на ней (остановку одновременно всеми осями на грузоприемной платформе, проезд одновременно всеми осями транспортного средства по грузоприемной платформе).
Весоизмерительные датчики 3 закреплены в узлах встройки 6 и соединены с помощью проводной (кабельной) линии связи как минимум с одним аналого-цифровым преобразователем 4 (АЦП), который может быть встроен (установлен) в грузоприемную платформу 1 или расположен в непосредственной близости с ним, позволяющим преобразовывать аналоговые сигналы, поступающие с весоизмерительных датчиков 3, в цифровые значения и передавать преобразованные данные (информацию) по каждому датчику с частотой (дискретизации) выборки данных (цифровых значений), позволяющей получать устройством с микропроцессором 5 необходимое количество данных для расчета нагрузок на оси (необходимая частота дискретизации не менее 1000 Гц), а также позволяющее увеличить расстояние передачи преобразованной информации (данных) от грузоприемной платформы 1 (зоны взвешивания) с АЦП 4 до устройства с микропроцессором 5, обрабатывающее полученные данные. Передача данных от АЦП до устройства с микропроцессором может быть выполнена как с помощью беспроводной среды передачи данных, так и с помощью проводной (кабельной) передачи данных. Например, для передачи весоизмерительной информации по последовательному интерфейсу RS-485 длина кабельной линии связи между ними может составлять до 1000м.
Устройство с микропроцессором 5 может быть расположено в зависимости от условий эксплуатации либо в непосредственной близости с грузоприемной платформой - в зоне взвешивания, либо удаленно - в зоне, предназначенной для работы в отдельных помещениях (весовая, товарная зоны, серверная и т.д.) и может входить в состав программно-технических комплексов, терминалов, ПК, вычислительных устройств и других устройств для обработки информации. Устройство с микропроцессором 5 с определенными программными средствами и установленным программным обеспечением позволяет осуществлять:
- настройку параметров для заданных условий взвешивания под метрологические характеристики весов, в частности максимальные и минимальные нагрузки, пределы допускаемой погрешности;
- прием и обработка данных (величин) с каждого нагруженного весоизмерительного датчика, поступающих с определенной частотой, при последовательном заезде осей транспортного средства на грузоприемную платформу и/или проезде, и/или при остановке на ней, и/или при последовательном съезде с нее;
- привязку данных к текущему времени, дате (день, месяц, год);
- определение нагрузки на каждую ось с учетом данных, полученных при последовательном заезде каждой оси транспортного средства на грузоприемную платформу, и данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса при статическом режиме взвешивания;
и/или
- определение нагрузки на каждую ось с учетом данных, полученных при последовательном заезде каждой оси транспортного средства на грузоприемную платформу, и данных, измеренных при последовательном съезде каждой оси транспортного средства с грузоприемной платформы (взвешивание в движении);
и/или
- определения полной массы транспортного средства с учетом данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса (взвешивание в статике)
и/или
- определения полной массы транспортного средства с учетом данных, полученных при последовательном заезде каждой оси транспортного средства на грузоприемную платформу, и данных, полученных при последовательном съезде каждой оси транспортного средства с грузоприемной платформы (взвешивание в движении);
и/или
- устройство с микропроцессором может быть выполнено с возможностью хранения и/или передачи, и/или отображения полученных данных и/или результатов взвешивания.
Таким образом использование платформы, способной разместить транспортное средство целиком, датчиков и АЦП определенного вида позволяют производить измерения для определения нагрузок на оси с помощью устройства с микропроцессором, а устройство с микропроцессором на основе полученных данных производить расчет нагрузок на оси, в том числе расчет массы транспортного средства, создавая весы (рабочую взвешивающую систему/устройство) для определения нагрузок на оси транспортного средства и его массы.
Использование таких весов позволяет повысить технологичность как при сборке, так и при ремонтных работах, при эксплуатации, повысить точность и надежность работы.
Использование АЦП заявленного вида позволяет подсоединять к нему либо все датчики, либо часть датчиков в зависимости от исполнения платформы (одна секция или несколько секций, предпочтительно когда все датчики секции подключены к одному АЦП), что в свою очередь увеличивает точность измерений, так как отсутствует разброс погрешности преобразованных данных, передаваемых на устройство с микропроцессором с определенной частотой дискретизации по каждому датчику, и соответственно облегчает процесс выявления выхода из строя датчика или датчиков и АЦП, а также повышает надежность работы и технологичность.
Технологичность сборки, ремонтных работ и эксплуатации, надежность работы, точность измерений и расчета нагрузок на оси повышается также за счет отсутствия дополнительных устройств необходимых для измерения и расчета нагрузок на оси, например, таких как в приведенных аналогах (дополнительные подкладные весы, петли, особое расположение платформ и др.).
На точность измерений также влияет возможность устройства с микропроцессором рассчитывать нагрузку на каждую ось учитывая, кроме данных, полученных при последовательном заезде каждой оси транспортного средства на грузоприемную платформу, дополнительных данных, а именно данные, полученные во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса при статическом режиме взвешивания или данные, измеренные при последовательном съезде каждой оси транспортного средства с грузоприемной платформы (взвешивание в движении).
Пример взвешивания транспортного средства на весах для определения нагрузок на его оси, а также массы транспортного средства.
Создают в соответствии с требованиями эксплуатации весов зону взвешивания, устанавливая грузоприемную платформу 1 с весоизмерительными датчиками 3, длина которого соответствует длине максимально длинного взвешиваемого транспортного средства для данных условий (фиг. 1). Грузоприемная платформа 1 включает две секции 2, опирающиеся на весоизмерительные датчики 3, соединенные с аналого-цифровыми преобразователями (АЦП) 4 с помощью кабельной связи, каждый из которых позволяет подключать до четырех весоизмерительных датчиков 3 и преобразовывать по каждому из них входной сигнал в цифровой для дальнейшей передачи на устройство обработки данных (устройство с микропроцессором 5) в частности с частотой дискретизации 1125 Гц. Весоизмерительные датчики измеряют, преобразуют воздействующие на них силы тяжести в аналоговые сигналы. Сигналы с нагруженных датчиков поступают на АЦП 4, преобразуются в нем в последовательность цифровых значений, с частотой выборки цифровых значений (дискретизации) из аналогового сигнала 1125 Гц, которые передаются на устройство с микропроцессором 5 для обработки информации (данных), а именно для расчета нагрузок на оси, а также для расчета массы транспортного средства. Устройство с микропроцессором 5 входит в состав программно-технического комплекса, расположенного в весовой зоне с местом для оператора. На устройстве с микропроцессором 5 устанавливают программное обеспечение, содержащее алгоритмы для расчета нагрузки на каждую ось и массы транспортного средства, а также создают или подключают базу данных (на сервере), настраивают параметры для заданных условий взвешивания под метрологические характеристики весов.
Один из способов работы весов. Весы начинают работать с момента заезда первой оси транспортного средства на грузоприемную платформу, фиксируя значения, имеющие приращение массы, определяя заезды последующих осей по превышению пороговых значений до остановки транспортного средства всеми осями на грузоприемной платформе для определения нагрузок на оси транспортного средства. Весы продолжают работать после остановки транспортного средства всеми осями на грузоприемной платформе и стабилизации веса, фиксируя значения нагрузки для определения массы транспортного средства и для определения (расчета, корректировки) нагрузки на каждую ось.
Другой способ работы весов. Весы начинают работать с момента заезда первой оси транспортного средства на грузоприемную платформу до полного съезда транспортного средства с грузоприемной платформы, фиксируя значения при последовательном заезде осей и последовательном съезде осей без остановок для расчета нагрузки на каждую ось, а также массы транспортного средства на их основе.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны.
Все признаки заявляемого технического решения в совокупности находятся в причинно-следственной связи с заявленным техническим результатом, позволяют создать более технологичные, точные весы, с возможностью размещения одновременно всех осей транспортного средства на грузоприемной платформе, измерения и определения нагрузок на оси, а также его массы. Использование заявляемого технического решения позволяет также расширить функциональные возможности весов, имеющих грузоприемную платформу для размещения транспортного средства целиком, так как в основном большинство известных из уровня техники весов с такой платформой имеют возможность определять только массу транспортного средства и только в статическом режиме взвешивания.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЕ ВЕСЫ ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ ВАГОНОВ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2024 |
|
RU2825076C1 |
| Устройство для взвешивания транспортных средств | 1988 |
|
SU1585688A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2263288C2 |
| Весовое устройство с зафиксированной грузоприемной платформой | 2023 |
|
RU2815856C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1996 |
|
RU2108551C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ДВИЖЕНИИ | 1992 |
|
RU2046299C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| ВАГОННЫЕ ВЕСЫ | 2013 |
|
RU2561245C2 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА В ТРАНСПОРТНОМ СРЕДСТВЕ | 1995 |
|
RU2110047C1 |
Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания транспортного средства целиком и/или поосного взвешивания, а также для взвешивания крупногабаритных грузов. Устройство включает грузоприемную платформу, размер которой позволяет разместить одновременно все оси транспортного средства, весоизмерительные датчики, закрепленные в узлах встройки, соединенные как минимум с одним аналого-цифровым преобразователем, позволяющим передавать на устройство с микропроцессором данные по каждому весоизмерительному датчику, преобразованные из аналогового сигнала в цифровые значения с частотой дискретизации, позволяющей устройству с микропроцессором производить расчет нагрузок на оси. Устройство выполнено с возможностью приема и обработки данных с каждого нагруженного датчика при заезде осей транспортного средства на грузоприемную платформу и/или проезде, и/или при остановке, и/или при съезде с нее осей транспортного средства; расчета нагрузки на каждую ось; расчета массы транспортного средства. Технический результат заключается в повышении технологичности, точности измерений, расширении функциональных возможностей весов. 6 з.п. ф-лы, 3 ил. 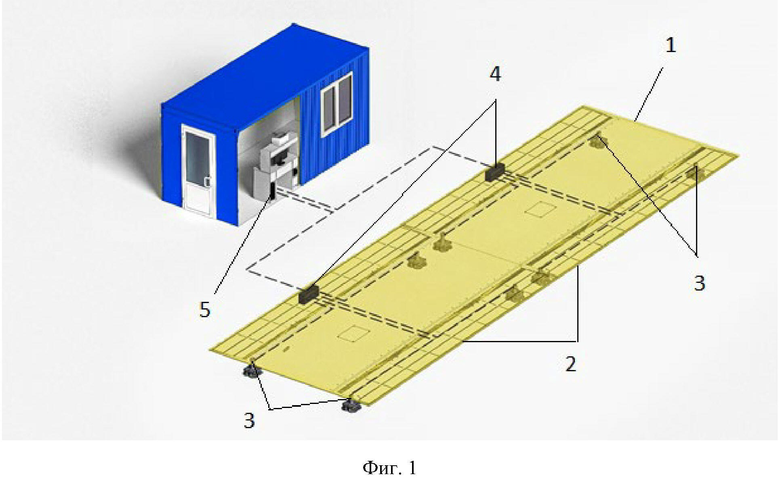
1. Весы для определения нагрузок на оси транспортного средства, включающие грузоприемную платформу, размер которой позволяет разместить одновременно все оси транспортного средства, отличающиеся тем, что содержат весоизмерительные датчики, закрепленные в узлах встройки, соединенные как минимум с одним аналого-цифровым преобразователем, позволяющим передавать на устройство с микропроцессором данные по каждому весоизмерительному датчику, преобразованные из аналогового сигнала в цифровые значения с частотой дискретизации, позволяющей устройству с микропроцессором производить расчет нагрузок на оси, устройство с микропроцессором выполнено с возможностью:
- приема и обработки данных с каждого нагруженного датчика при заезде осей транспортного средства на грузоприемную платформу и/или проезде, и/или при остановке, и/или при съезде с нее осей транспортного средства;
- расчета нагрузки на каждую ось с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса
и/или
- расчета нагрузки на каждую ось с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных при последовательном съезде осей транспортного средства с грузоприемной платформы.
2. Весы для определения нагрузок на оси транспортного средства по п. 1, отличающиеся тем, что частота дискретизации аналого-цифрового преобразователя составляет не менее 1000 Гц.
3. Весы для определения нагрузок на оси транспортного средства по п. 1, отличающиеся тем, что грузоприемная платформа выполнена в виде одной или нескольких секций.
4. Весы для определения нагрузок на оси транспортного средства по п. 3, отличающиеся тем, что грузоприемная платформа в виде одной секции имеет узлы для опоры на весоизмерительные датчики.
5. Весы для определения нагрузок на оси транспортного средства по п. 3, отличающиеся тем, что грузоприемная платформа в виде нескольких секций имеет узлы для опоры на весоизмерительные датчики, в месте стыковки секций выполненные общими и/или раздельными.
6. Весы для определения нагрузок на оси транспортного средства по п. 1, отличающиеся тем, что устройство с микропроцессором выполнено с возможностью расчета массы транспортного средства с учетом данных, полученных во время остановки транспортного средства всеми осями на грузоприемной платформе после стабилизации веса или с учетом данных, полученных при последовательном заезде осей транспортного средства на грузоприемную платформу, и данных, полученных при последовательном съезде осей транспортного средства с грузоприемной платформы.
7. Весы для определения нагрузок на оси транспортного средства по п. 1, отличающиеся тем, что устройство с микропроцессором выполнено с возможностью хранения и/или передачи, и/или отображения полученных данных и/или результатов взвешивания.
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2584715C1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |

