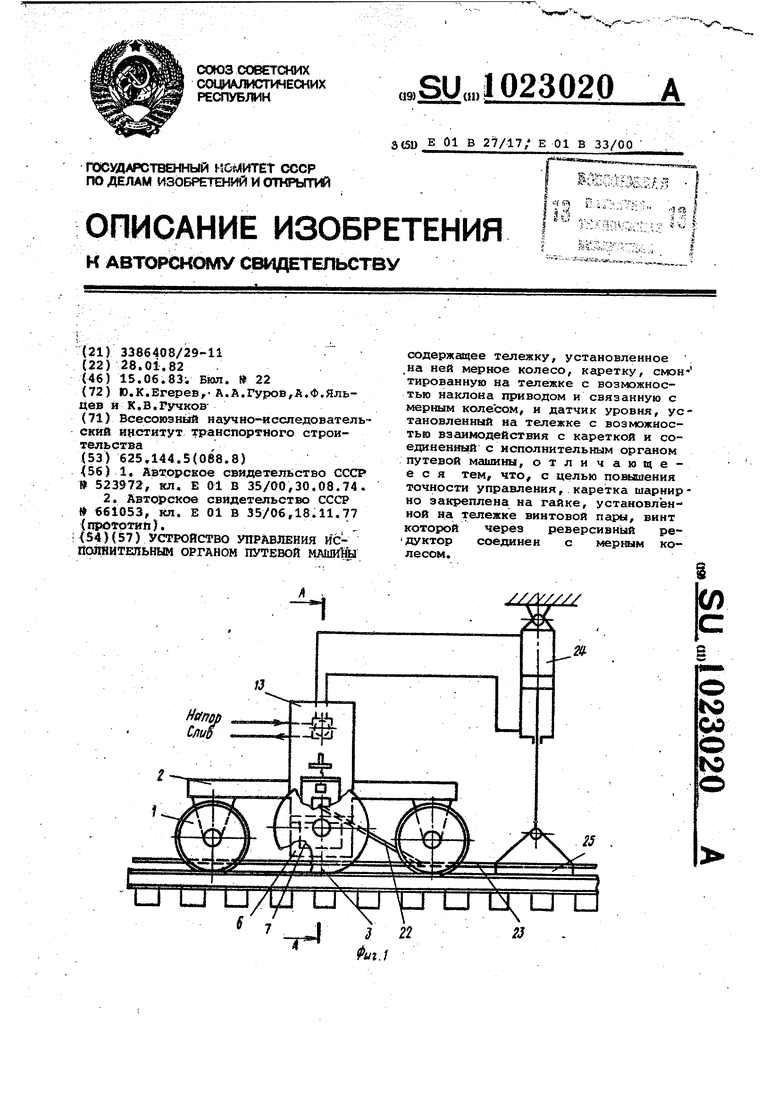
Изобретение относится к устрой|ствам для строительства й ремонта же лезнодорожного пути и предназначено для использования в системе автоматического управления исполнительными органа1 и путевых машин при выпол нении ими процесса выправки железнодорожного пути в поперечной плоскости. Известно устройство управления исполнительным органом путевой маши ны, содержащее измерительную тележку, установленное на ней мерное колесо, датчик уровня, смонтированный на шарнирно соединенной с тележкой платформе И Устройство не обеспечивает точного задания - отвода возвышения внешней рельсовой нити пути для всех возможных переходных кривых, так как предназначено для задания лишь нескольких величин отводов возвышения ведомой рельсовой нити (например: 0,,67/1000, 1/1000,2У100 по отношению к ведущей. В тоже время при строительстве железнодорожного пути возможно изменение величин отвода возвышений в пределах от О до 3/1000. Известно устройство управления исполнительным органом путевой машИ ны, содержащее тележку, установленное на ней мерное колесо, каретку, смонтированную на тележке с возмох :г ностью наклона приводом и связанную с мерным колесом, и датчик уров . ня установленный на тележке с возможностью взаимодействия с кареткой и соединенный с исполнительннг/s орга ном путевой машины 2 , Недостатки этого устройства свя заны с отсутствием жесткой кинематической связи между мерным колесом и перемещением каретки в вертикальной плоскости для возвышения ведомой рельсовой нити над ведущей в функции пройденного пути, что может приводить к появлению и накоплению ошибок и искажению положения рельсовых нитей в поперечной плоскости, а также с наличием потерь рабочего .времени на;выпрлненйв расчетрв для определения положения датчика уровн в зависимости от длины переходной, кривой и градиента отвода возвныеЦель изобретения - повышение точности управления исполнительным органом путевой- машины. Поставленная цель- достигается тем, что вустройстве управления исполнительным органом путевой .м шины, содержащем тележку, установле iiOe на ней мерной колесо, каретку, .смонтированную на тележке с возможностью наклона приводом и связанную с мерным колесом, и датчик уровня, установленный на тележке с возможностью взаимодействия с кареткой и соединенный с исполнительным органом путевой машины, каретка шарнирно закреплена на гайке установленной на тележке винтовой пары, винт которой через реверсивный редуктор соединен с мерным колесом. На фиг. 1 схематично изображено устройство управления исполнительным органом путевой мaшины на фиг.2 разрез А-А на фиг.1, на фиг. 3 схема реверсивного редуктора. Устройство управления исполнительным органом путевой машины содержит измерительную тележку 1, на раме 2 которой закреплено мерное колесо 3, соединенное с входной осью раверсив-ного редуктора 4 которая в свою очередь соединена винтом 5 винтовой пару, гайка б КОТОРОЙ перемещается в ; направляющих 7 и с помощью шарнира б соединена с кареткой 9. В то же время гайка б с помощью шарнира 10 соединена с приводом 11 наклона каретки 9, . например, винтового типа. На каретку 9 опирается конец площадки 12 датчика 13 уровня. Площадка 12 шарнирно закреплена на раме 2 тележки 1, причем ось шарнира 14 этого крепления лежит в вертикальной плоскости проходящей через ось пути. Датчик 13 уровня двухстоечного типа содержит следящий гидравлический распределителе 15, корпус 16 которого смонтирован в корпусе 17 датчика 13 уровня. Выходные койцы 18 штока золотника/ гидравлического распределителя 15 шарнирно соединены с .подвесками 19 грузов 20. Подвесь 19 шарнирно закреплены на корпусе 17. Между стойками датчи ка 13 уровня установлен на площадке 12 датчик 21 продольного профиля, поводок 22 которого находится в постоянном соприкосновении с измерительным тросом 23. Входная сторона следящего гидравлического распределителя 15 соединена с напорной и сливной магистралями гидравлической насосной установки (;не показана) , а выходная - со штоковой и бесштоковой полостями гидроцилиндра 24, шток которого соединен с рельсовым Захватом 25, гидроцилиндр 24 и закрепленный на нем захват 25 представляют собой исполнительный орган путевой машины. Заданием положения, каретки 9 с помощью привода 11, т.е. изменением угла наклона каретки 9 обеспечивается требуемый отвод возвышения пути в переходных кривых,, причем заданный града1ент отвода воз вышення обеспечивается бесступенчатым изменением угла наклона каретки 9.
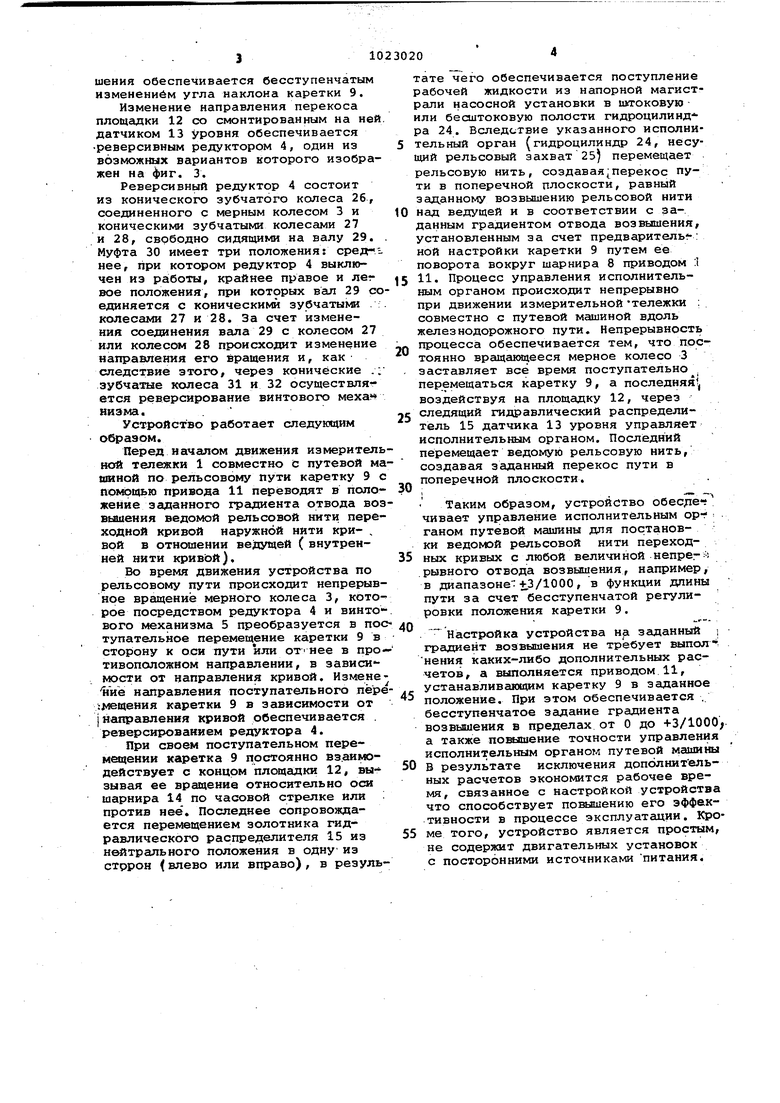
Изменение направления перекоса площадки 12 со смонтированным на ней датчиком 13 уровня обеспечивается реверсивным редуктором 4, один из возможных вариантов которого изображен на иг, 3.
Реверсивный редуктор 4 состоит из конического зубчатого колеса 26, соединенного с мерным колесом 3 и коническими зубчатыми колесами 27 и 28, свободно сидящими на валу 29. Муфта 30 имеет три положения: . нее, при котором редуктор 4 выключен из работы, крайнее правое и лег вое положения, при которых вал 29 соединяется с коническими зубчатыми колесами 27 и 28. За счет изменения соед}1нения вала 29 с колесом 27 или колесом 28 происходит изменение направления его вращения и, как следствие этого, через конические .: зубчатые колеса 31 и 32 осуществлявется реверсирование винтового меха низма. .
УстЕЮйство работает следующим образом.
Перед началом движения измерительной тележки 1 совместно с путевой машиной по рельсовому пути каретку 9 с по «рщью привода 11 переводят в поло жейие заданного градиента отвода возвьлаения ведомой рельсовой нити переходной кривой наружной нити кривой в отношении ведущей (внутренней нити кривой).
Во время движения устройства по рельсовому пути происходит непрерывное вращение мерного колеса 3, которое посредством редуктора 4 и винтового механизма 5 преобразуется в поступательное перемещение каретки 9 в сторону к оси пути или ОТ нее в про- тивоположном направлении, в зависи мости от направления кривой. ИзменеliHe направления поступательного пёре:ме|цения каретки 9 в зависимости от j направления кривой обеспечивается . реверсированием редуктора 4.
При своем поступательном перемнении каретка 9 постоянно взаимодействует с концом площадки 12, вызывая ее вращение относительно оси шарнира 14 по часовой стрелке или против нее. Последнее сопровождается перемещением золотника гидравлического распределителя 15 из нейтрального положения в одну из стррон {влево или вправо), в результате чего обеспечивается поступление рабочей жидкости из напорной магистрали насосной установки в шлгоковую или бесштоковую полости гидроцилинд ра 24. Вследствие указанного исполнительный орган (гидроцилиндр 24, несущий рельсовый захват 25) перемещает рельсовую нить, создавая перекос пути в поперечной плоскости, равный заданному возвышению рельсовой нити
0 над ведущей и в соответствии с за-. данным градиентом отвода возвышения, установленным за счет предваритель -: ной настройки каретки 9 путем ее поворота вокруг шарнира 8 приводом :i
5 11 Процесс управления исполнительным органом происходит непрерывно при движении измерительной тележки : совместно с путевой машиной вдоль железнодорожного пути. Непрерывность процесса обеспечивается тем, что пос0тоянно вращающееся мерное колесо 3 . заставляет все время поступательно . перемещаться каретку 9, а последняя воздействуя на площадку 12, через
5 следящий гищ авлический распределитель 15 датчика 13 уровня управляет исполнительным органом. Последний перемещает ведомую рельсовую нить, создавая заданный перекос пути в
поперечной плоскости.
Таким образом, устройство обесдеч чивает управление исполнительным орг ганом путевой машины для постановки ведомой рельсовой нити переходных кривых с любой величиной непре.--.рывного отвода возвышения, например, в диапазоне-:+3/1000, в функции длины пути за счет бесступенчатой регулировки положения каретки 9.
Настройка устройства на заданный ; градиент возвышения не требует выпол нения каких-либо дополнительных расчетов, а шлполняется приводом 11, устанавливающим каретку 9 в заданное
5 положение. При этом обеспечивается . бесступенчатое задание градиента возвьпиения в пределах от О до +3/1000; а также позмлшение точности управления исполнительным органом путевой машины
0 в результате исключения дополнительных расчетов экономится рабочее время, связанное с настройкой устройства что способствует повышению его эффе1Ктивности в процессе эксплуатации. Кроме того, устройство является простым, не содержит двигательных установок с посторонними источникакм питания.
Л-/
/It/I in
Ж
n
If
11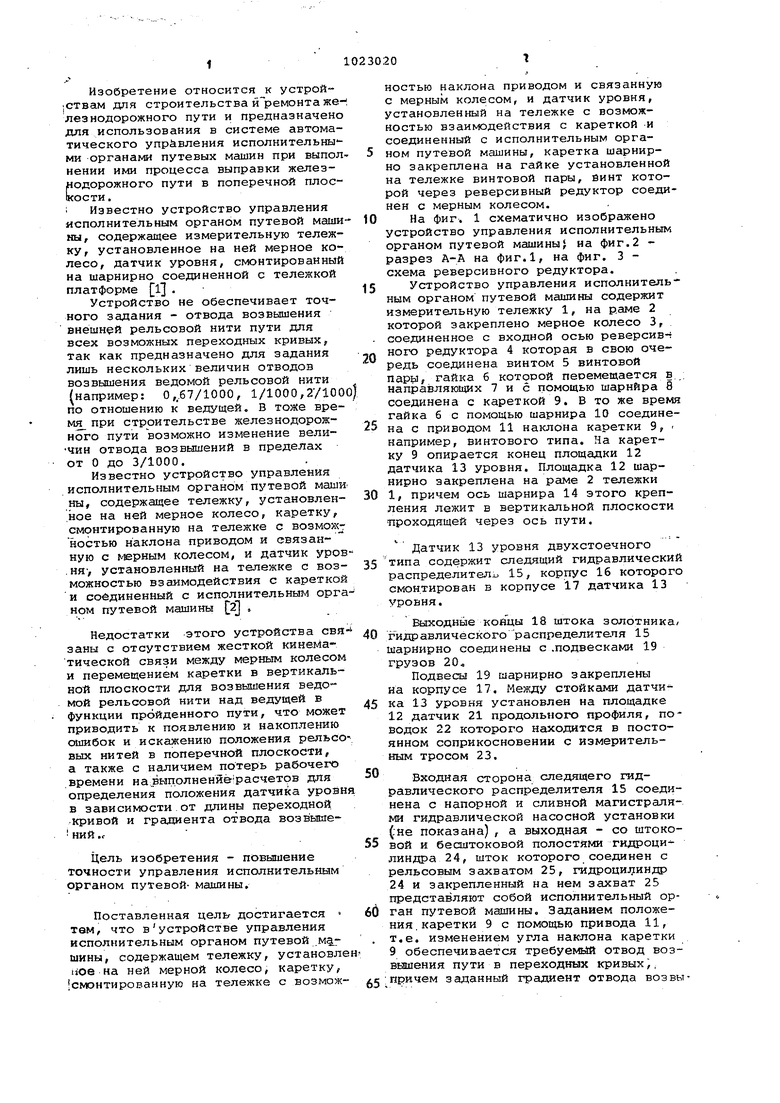
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления исполнительным органом путевой машины | 1981 |
|
SU979567A1 |
| Устройство управления выправкой железнодорожного пути | 1981 |
|
SU1025774A1 |
| Путевая машина | 1982 |
|
SU1082891A1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО для РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1973 |
|
SU405994A1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| Устройство управления исполнительным органом путевой машины | 1974 |
|
SU523972A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
УСТРОЙСТВО УПРАВЛЕНИЯ ИСЙОЛЙИТЕЛЬНЫМ ОРГАНОМ ПУТЕВОЙ МАШИШ содержащее тележку, установленное .на ней мерное колесо, каретку, смон тированную на тележке с возможностью наклона приводом и связанную с мер(шм колесом, и датчик уровня, установленный на тележке с возможностью взаимодействия с кареткой и соединенный с исполнительным органом путевой машины, отлнчаюцее с я тем, что, с целью повышения точности управления, каретка шарнир но закреплена на гайке, установлен ной на тележке винтовой пары, винт которой через реверсивный редуктор соединен с кюрным колесом.